Траектория движения в физике, теория и онлайн калькуляторы
Траектория движения
Определение и основные понятия траектории движения
Во многих задачах интерес представлю не только перемещения материальных точек в пространстве, но и траектории их движения.
Определение
Линию, которую описывает частица при своем движении, называется траекторией движения.
В зависимости от формы траектории механическое движение можно разделить на:
- прямолинейное движение, траекторией движения точки в этом случае является прямая линия;
- и криволинейное перемещение (траектория — кривая линия).
Форма траектории зависит от выбора системы отсчета. В разных системах отсчета траектории могут быть представлены разными линиями, могут быть прямыми и кривыми.
При движении точки с постоянным ускорением, которое описывает уравнение:
[overline{r}left(tright)={overline{r}}_0+{overline{v}}_0t+frac{overline{a}t^2}{2}left(1right),]
(где $overline{r}left(tright)$ — радиус-вектор точки в момент времени $t$; ${overline{v}}_0$ — начальная скорость движения точки; $overline{a}$ — ускорение точки,) траектория движения представляет собой плоскую кривую, что означает все точки этой кривой находятся в одной плоскости. Положение этой плоскости в пространстве задают векторы ускорения и начальной скорости. Ориентацию координатных осей чаще всего выбирают так, чтобы плоскость движения совпадала с одной из координатных плоскостей. В этом случае векторное уравнение (1) можно свести к двум скалярным уравнениям.
Уравнение траектории движения
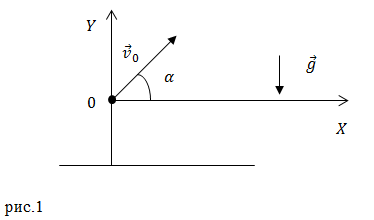
Рассмотрим свободное движение тела около поверхности Земли. Начало координат разместим в точке бросания тела (рис.1). Оси координат направим так, как изображено на рис.1.
Тогда уравнение движения тела (1) в проекциях на координатные оси декартовой системы координат принимает вид системы из двух уравнений:
[left{ begin{array}{c}
x=v_0t{cos alpha left(2right), } \
y=v_0t{sin alpha }-frac{gt^2}{2}left(3right). end{array}
right.]
Для того чтобы получить уравнение траектории движения тела ($y=y(x)$) следует исключить время движения тела из уравнений (2) и (3). Выразим из уравнения (2) $t$ и подставим его в выражение (3), получим:
[t=frac{x}{v_0{cos alpha }}; y=v_0frac{x}{v_0{cos alpha }}{sin alpha }-frac{g}{2}{left(frac{x}{v_0{cos alpha }}right)}^2to y=x tg alpha -frac{gx^2}{2v^2_0{cos}^2alpha }left(4right).]
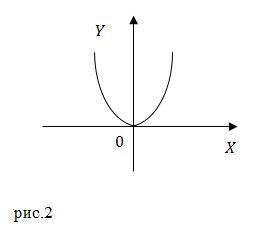
Выражение (4) это уравнение параболы, проходящей через начало координат. Ее верви направлены вниз, так как коэффициент при $x^2$ меньше нуля.
Вершина этой параболы находится в точке с координатами:
[left{ begin{array}{c}
x=frac{v^2_0{sin alpha {cos alpha } }}{g} \
y=frac{v^2_0{sin}^2alpha }{2g} end{array}
right.left(5right).]
Найти координаты вершины траектории можно при помощи известных правил исследования функций на экстремум. Так, положение максимума функции $y(x)$ определяют, приравнивая к нулю первую производную ($frac{dy}{dx}$) от нее по $x$.
Обратимость движения
Из представления о траектории можно конкретизировать смысл обратимости механического движения.
Пусть частица движется в силовом поле таком, что ее ускорение в любой точке обладает определенной величиной, не зависящей от скорости. Как будет двигаться эта частица, если, в какой то точке ее траектории направление скорости заменить противоположным? С точки зрения математики это эквивалентно замене $t $ на $-t$ для всех уравнений. Уравнение траектории время не содержит, получается, что частица будет перемещаться «вспять» по той же самой траектории. При этом отрезки времени между любыми точками траектории будут одинаковы при прямом и обратном движении. Всякой точке траектории ставится в соответствие определенное значение величины скорости независимо от направления движения по данной траектории. Данные свойства наглядны в колебательных движениях маятника.
Все сказанное выше справедливо тогда, когда можно пренебречь любым сопротивлением движению. Обратимость движения существует, когда выполняется закон сохранения механической энергии.
Параметры траектории движения
Положение точек системы отсчета можно определять при помощи разных способов. В соответствии с этими способами описывают и движение точки или тела:
- Координатная форма описания движения. Выбирается система координат, в ней положение точки характеризуют тремя координатами (в трехмерном пространстве). Это могут быть координаты $x_1=x,x_2=y,x_3=z$, в декартовой системе координат. $x_1=rho ,x_2=varphi ,x_3= z$ в цилиндрической системе и т.д. При перемещении точки координаты являются функциями времени. Описать движение точки — это значит указать эти функции:
- При описании движения в векторной форме положение материальной точки задает радиус-вектор ($overline{r}$) по отношению к точке, которую принимают начальной. В этом случае вводят точку (тело) отсчета. При перемещении точки вектор $overline{r}$ постоянно изменяется. Конец этого вектора описывает траекторию. Движение задает выражение:
- Третьим способом описания движения является описание с помощью параметров траектории.
[x_1=x_1left(tright);; x_2=x_2left(tright);; x_3=x_3left(tright)left(6right).]
[overline{r}=overline{r}left(tright)left(7right).]
Путь — это скалярная величина, равная длине траектории.
Если траектория задана, то задачу описания движения сводят к определению закона движения вдоль нее. При этом выбирается начальная точка траектории. Любая другая точка характеризуется расстоянием $s$ по траектории от начальной точки. В таком случае движение описывают выражением:
[s=sleft(tright)left(8right).]
Пусть по окружности радиуса R равномерно перемещается точка. Закон движения точки по окружности в рассматриваемом методе запишем как:
[s=Atleft(9right),]
где $s$ — путь точки по траектории; $t$ — время движения; $A$ — коэффициент пропорциональности. Известными являются окружность и точка начала движения. Отсчет положительных величин $s$ совпадает с направлением перемещения точки по траектории.
Знание траектории движения тела во многих случаях существенно упрощает процесс описания движения тела.
Примеры задач с решением
Пример 1
Задание: Точка движется в плоскости XOY из начала координат со скоростью $overline{v}=Aoverline{i}+Bxoverline{j} , $где $overline{i}$, $overline{j}$ — орты осей X и Y; $A$,B — постоянные величины. Запишите уравнение траектории движения точки ($y(x)$). Изобразите траекторию. textit{}
Решение: Рассмотрим уравнение изменения скорости частицы:
[overline{v}=Aoverline{i}+Bxoverline{j} left(1.1right).]
Из этого уравнения следует, что:
[left{ begin{array}{c}
v_x=A, \
v_y=Bx end{array}
right.left(1.2right).]
Из (1.2) имеем:
[dx=v_xdt=Adtto dt=frac{dx}{A};;dy=v_ydt=Bxdtto dy=Bxfrac{dx}{A} left(1.3right).]
Для получения уравнения траектории следует решить дифференциальное уравнение (1.3):
[y=intlimits^x_0{frac{B}{A}}xdx=frac{B}{2A}x^2.]
Мы получили уравнение параболы, ветви которой направлены вверх. Эта парабола проходит через начало координат. Минимум этой функции находится в точке с координатами:
[left{ begin{array}{c}
x=0 \
y=0. end{array}
right.]
Пример 2
Задание: Движение материальной точки в плоскости описывает система уравнений: $left{ begin{array}{c}
x=At. \
y=At(1+Bt) end{array}
right.$, где $A$ и $B$ — положительные постоянные. Запишите уравнение траектории точки.
Решение: Рассмотрим систему уравнений, которая задана в условии задачи:
[left{ begin{array}{c}
x=At. \
y=Atleft(1+Btright) end{array}
right.left(2.1right).]
Исключим время из уравнений системы. Для этого из первого уравнения системы выразим время, получим:
[t=frac{x}{A}left(2.2right).]
Подставим вместо $t$ правую (2.2) часть во второе уравнение системы (2.1), имеем:
[y=Atleft(1+Btright)=At+ABt^2=Afrac{x}{A}+AB{(frac{x}{A})}^2=x+frac{B}{A}x^2.]
Ответ: $y=x+frac{B}{A}x^2$
Читать дальше: ускорение тела.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Траектория и уравнения движения точки
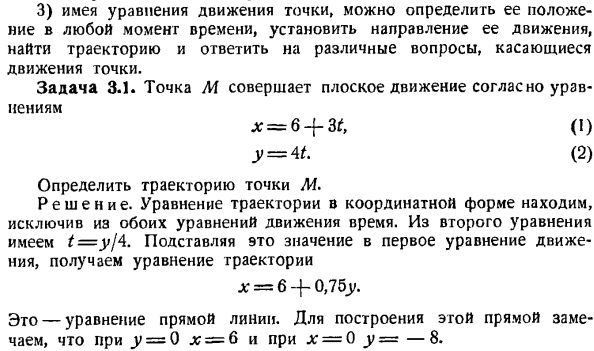


Траектория и уравнения движения точки
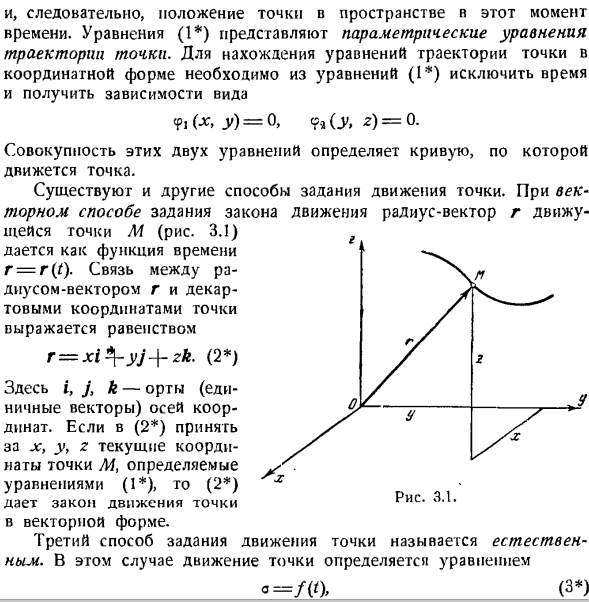
- Уравнение движения для локуса и точек 1°.Основные понятия. Траекторией точки называется линия, описываемая точкой движения в пространстве. Траектории могут быть плоскими или пространственными кривыми. Движение точки определяется установлением закона движения. Закон движения точек (уравнения) устанавливает зависимость расположения точек во временном пространстве.
Движение точки M в фиксированной системе координат xyz определяется установкой 3 функций (рис.3.1). * = / > ( ’). J’ = / *( Людмила Фирмаль
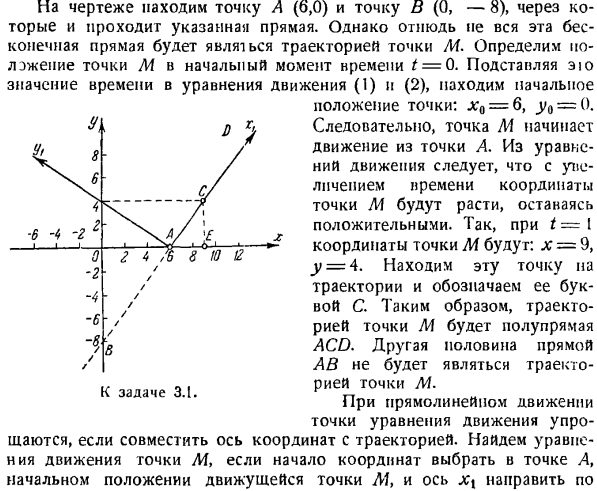
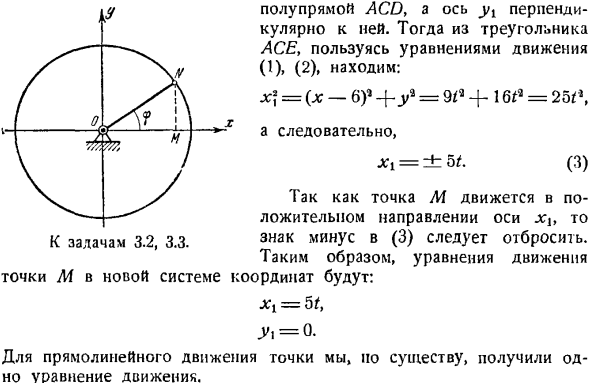
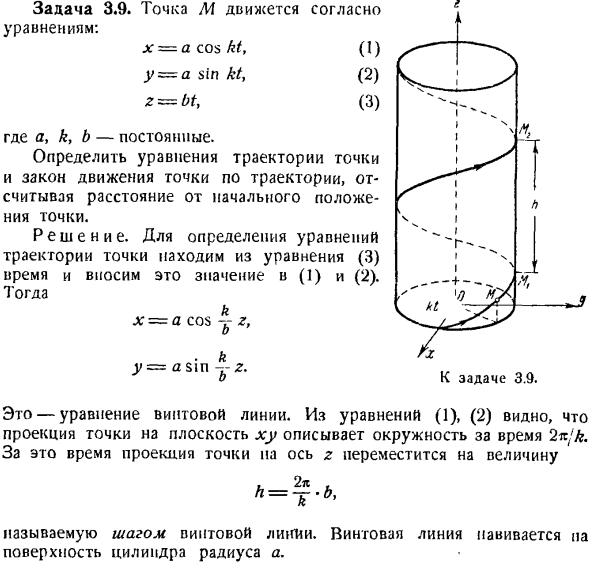
Создайте уравнение движения для точки N в декартовой системе координат. Найдите уравнение его орбиты. Определяет полный 1-кратный поворот точки N и точку, в которой координаты обеих точек равны. The solution. To составьте уравнение движения точки N, необходимо представить ее координаты в виде функции времени. Из рисунка найдите координату x в точке N. Х = О с COS Людмила Фирмаль
Затем по координатам определяется максимальное отклонение точки м от центра колебаний О. МПМ = а ХІ =-а. Величина a называется амплитудой колебаний, kt — (- (J называется фазой колебаний, ap-начальной фазой колебаний. Определите период колебаний, то есть время, в течение которого точки совершают 1 полное колебание, то есть возвращаются в исходное положение с той же скоростью и величиной. Обозначим период буквой Т и найдем его значение из условия, что приращение фазы колебаний за это время равно 2π. Иначе говоря
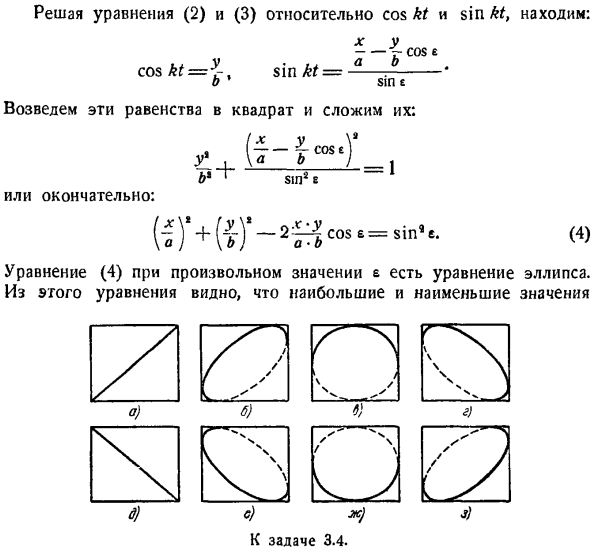
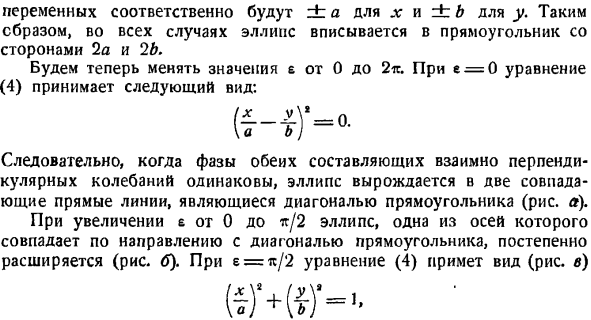
Задача 3.4.Точки перемещаются в соответствии с уравнением. x = A cos(kt-e), (1) г = Б, потому что КТ(2) Определите уравнение траектории движения точки. Как изменяется локус точек при увеличении разности фаз£от 0 до 2r? The solution. To найдя уравнение орбиты точки в явном виде, нужно исключить время из уравнения motion. To для этого сначала преобразуем уравнение движения. х = а соѕ(т-е)= а [потому что КТ потому что£-(- КТ грех грех ЭЖ.(3) решая уравнения (2) и (3) для cos kt и sin kt, получим: Х г — г соз£ а б. Преступление. потому что КТ =£о грех КТ = Добавьте эти уравнения, возведя их в квадрат. г, (т -£»»’) ’ 1 Б% ’ °1 (4) Sin2 е
Или в конце: — В + М — ^^ ко ^ грех ’、 уравнение (4) для любого значения e является уравнением эллипса. Из этого уравнения максимальные и минимальные значения являются Параметры±соответственно. a для x и zt b для y. таким образом, во всех случаях эллипс вписывается в прямоугольники со сторонами 2a и 2b. измените значение от 0 до 2ir. если e = 0, то выражение(4) принимает вид:
Так, если фазы обеих составляющих колебаний перпендикулярны друг другу, то эллипс вырождается в 2 совпадающие прямые, являющиеся диагоналями прямоугольника(рис. в коса -> -= учитывая it_y = 0, горизонтальная дальность полета I определяется из орбитального уравнения (4).
log A x cos2 a следовательно 2 значения x Т / л грех 2а х0 = 0, ХН = 1 = 8. Первое значение соответствует первому моменту (моменту отправления точки), А второе определяет горизонтальное расстояние. Сравнивая значения /и 5, можно сделать вывод, что/ = 2s, то есть точки достигают наивысшего положения в диапазоне горизонтальной половины. Итак, положение точки в пространстве в этой точке.
Уравнение (1) представляет собой параметрическое уравнение траектории a point. To найдя уравнение орбиты точки в координатной форме, нужно исключить время из уравнения(1) и получить форму зависимости. БФ,(Ци, г)= 0, 9а, КР, з)= 0. Комбинация этих 2 уравнений определяет кривую, по которой перемещаются точки. Есть и другие способы указать движение points. In векторным методом, определяющим законы движения, радиус-вектор r движущейся точки M (рис.3.1) задается как функция времени r = r (t).Связь между радиус-вектором r и Декартовыми координатами точки представлена уравнением Р = ХІ * — ый + ЗК. (2 ) Где i, j и k-единичные векторы (единичные векторы) осей. (2)
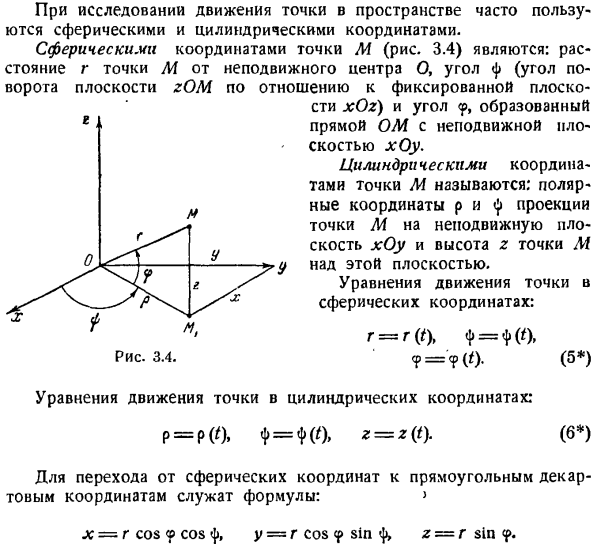
Если вы получаете x, y> z, текущие координаты точки A4, как определено y. уравнение(1), то (2) x Дайте закон движения точек в векторной форме. 3-й способ задания движения точек называется natural. In в этом случае движение точек определяется уравнением а = /( (). Сферические и цилиндрические координаты часто используются для изучения движения точки в пространстве. Сферическими координатами точки M (рис.3.4) являются расстояние r точки M от неподвижного центра O, угол φ (угол поворота плоскости zOM относительно неподвижной плоскости xOz) и угол ? =?(’) * (5 *)
Уравнение движения для цилиндрических координат: р = п(о> т = м р = РЗ). (си *) м г Так… 1. Рисунок 3.4. Да. Чтобы перейти от сферических координат к декартовым, используйте следующую формулу:> х = р с с COS


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Траектория движения
Определение и основные понятия траектории движения
Во многих задачах интерес представлю не только перемещения материальных точек в пространстве, но и траектории их движения.
Линию, которую описывает частица при своем движении, называется траекторией движения.
В зависимости от формы траектории механическое движение можно разделить на:
- прямолинейное движение, траекторией движения точки в этом случае является прямая линия;
- и криволинейное перемещение (траектория — кривая линия).
Форма траектории зависит от выбора системы отсчета. В разных системах отсчета траектории могут быть представлены разными линиями, могут быть прямыми и кривыми.
При движении точки с постоянным ускорением, которое описывает уравнение:
Уравнение траектории движения
Рассмотрим свободное движение тела около поверхности Земли. Начало координат разместим в точке бросания тела (рис.1). Оси координат направим так, как изображено на рис.1.
Тогда уравнение движения тела (1) в проекциях на координатные оси декартовой системы координат принимает вид системы из двух уравнений:
Для того чтобы получить уравнение траектории движения тела ($y=y(x)$) следует исключить время движения тела из уравнений (2) и (3). Выразим из уравнения (2) $t$ и подставим его в выражение (3), получим:
Выражение (4) это уравнение параболы, проходящей через начало координат. Ее верви направлены вниз, так как коэффициент при $x^2$ меньше нуля.
Вершина этой параболы находится в точке с координатами:
Найти координаты вершины траектории можно при помощи известных правил исследования функций на экстремум. Так, положение максимума функции $y(x)$ определяют, приравнивая к нулю первую производную ($frac$) от нее по $x$.
Обратимость движения
Из представления о траектории можно конкретизировать смысл обратимости механического движения.
Пусть частица движется в силовом поле таком, что ее ускорение в любой точке обладает определенной величиной, не зависящей от скорости. Как будет двигаться эта частица, если, в какой то точке ее траектории направление скорости заменить противоположным? С точки зрения математики это эквивалентно замене $t $ на $-t$ для всех уравнений. Уравнение траектории время не содержит, получается, что частица будет перемещаться «вспять» по той же самой траектории. При этом отрезки времени между любыми точками траектории будут одинаковы при прямом и обратном движении. Всякой точке траектории ставится в соответствие определенное значение величины скорости независимо от направления движения по данной траектории. Данные свойства наглядны в колебательных движениях маятника.
Все сказанное выше справедливо тогда, когда можно пренебречь любым сопротивлением движению. Обратимость движения существует, когда выполняется закон сохранения механической энергии.
Параметры траектории движения
Положение точек системы отсчета можно определять при помощи разных способов. В соответствии с этими способами описывают и движение точки или тела:
- Координатная форма описания движения. Выбирается система координат, в ней положение точки характеризуют тремя координатами (в трехмерном пространстве). Это могут быть координаты $x_1=x,x_2=y,x_3=z$, в декартовой системе координат. $x_1=rho ,x_2=varphi ,x_3= z$ в цилиндрической системе и т.д. При перемещении точки координаты являются функциями времени. Описать движение точки — это значит указать эти функции: [x_1=x_1left(tright);; x_2=x_2left(tright);; x_3=x_3left(tright)left(6right).]
- При описании движения в векторной форме положение материальной точки задает радиус-вектор ($overline$) по отношению к точке, которую принимают начальной. В этом случае вводят точку (тело) отсчета. При перемещении точки вектор $overline$ постоянно изменяется. Конец этого вектора описывает траекторию. Движение задает выражение: [overline=overlineleft(tright)left(7right).]
- Третьим способом описания движения является описание с помощью параметров траектории.
Путь — это скалярная величина, равная длине траектории.
Если траектория задана, то задачу описания движения сводят к определению закона движения вдоль нее. При этом выбирается начальная точка траектории. Любая другая точка характеризуется расстоянием $s$ по траектории от начальной точки. В таком случае движение описывают выражением:
Пусть по окружности радиуса R равномерно перемещается точка. Закон движения точки по окружности в рассматриваемом методе запишем как:
где $s$ — путь точки по траектории; $t$ — время движения; $A$ — коэффициент пропорциональности. Известными являются окружность и точка начала движения. Отсчет положительных величин $s$ совпадает с направлением перемещения точки по траектории.
Знание траектории движения тела во многих случаях существенно упрощает процесс описания движения тела.
Примеры задач с решением
Задание: Точка движется в плоскости XOY из начала координат со скоростью $overline=Aoverline+Bxoverline , $где $overline$, $overline$ — орты осей X и Y; $A$,B — постоянные величины. Запишите уравнение траектории движения точки ($y(x)$). Изобразите траекторию. textit<>
Решение: Рассмотрим уравнение изменения скорости частицы:
Из этого уравнения следует, что:
Для получения уравнения траектории следует решить дифференциальное уравнение (1.3):
Мы получили уравнение параболы, ветви которой направлены вверх. Эта парабола проходит через начало координат. Минимум этой функции находится в точке с координатами:
Задание: Движение материальной точки в плоскости описывает система уравнений: $left< begin x=At. \ y=At(1+Bt) end right.$, где $A$ и $B$ — положительные постоянные. Запишите уравнение траектории точки.
Решение: Рассмотрим систему уравнений, которая задана в условии задачи:
Исключим время из уравнений системы. Для этого из первого уравнения системы выразим время, получим:
Подставим вместо $t$ правую (2.2) часть во второе уравнение системы (2.1), имеем:
Уравнение движения материальной точки
Движение материальной точки в пространстве – это изменение ее положения относительно других тел с течением времени.
Имеет смысл говорить только о движении в некоторой системе отсчета.
Система отсчета. Системы координат
Точки, располагаемые в пустом пространстве, не различаются. Поэтому о точке рассуждают при условии нахождения в ней материальной точки. Определить ее положение можно при помощи измерений в системе координат, где и проводится нахождение пространственных координат. Если рассматривать в виде примера поверхность Земли, то следует учитывать широту и долготу располагаемой точки.
В теории используется декартова прямоугольная система координат, где определение точки возможно при наличии радиус-вектора r и трех проекций x , y , z – ее координат. Могут быть применены другие:
- сферическая система с положением точек и ее радиус-вектором, определенных координатами r , υ , φ ;
- цилиндрическая система с координатами p , z , α ;
- на полярной плоскости с параметрами r , φ .
В теории зачастую не принимают во внимание реальную систему отсчета, а сохраняют только ту, которая представляет собой ее математическую модель, применяемую во время практических измерений.
Кинематическое уравнение движения материальной точки
Любая система отсчета или координат предполагает определение координат материальной точки в любой момент времени.
При условии положения и определения материальной точки в данной системе отсчета считается, что ее движение задано или описано.
Это возможно при использовании кинематического уравнения движения:
Аналитически положение точки определяется совокупностью трех независимых между собой чисел. Иначе говоря, свободная точка имеет три степени свободы движения.
Ее перемещение по уравнению ( 1 ) определено, если имеется указанное положение в любой момент времени t . Для этого следует задавать декартовы координаты точки в качестве однозначных и непрерывных функций времени:
x ( t ) = x , y ( t ) = y , z ( t ) = z ( 2 ) .
Прямоугольные декартовы координаты x , y , z — это проекции радиус-вектора r ¯ , проведенного из начала координат. Очевидно, что длину и направление r ¯ можно найти из соотношений, где a , β , γ являются образованными радиус-вектором углами с координатными осями.
Равенства ( 2 ) считают кинематическими уравнениями движения материальной точки в декартовых координатах.
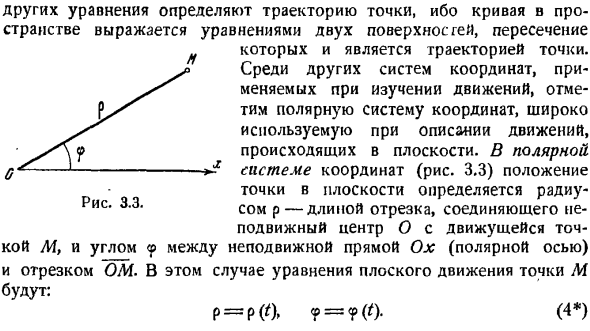
Они могут быть записаны в другой системе координат, которая связана с декартовой взаимно однозначным преобразованием. Если движение точки происходит в плоскости О х у , тогда применимы полярные координаты r , φ , относящиеся к декартовым преобразованиям. Данный случай подразумевает использование уравнения движения точки следующего вида:
r = r ( t ) , φ = φ ( t ) ( 3 ) .
Кинематическое уравнение движения точки в криволинейных координатах q 1 , q 2 , q 3 , связанных с декартовыми преобразованиями вида x = x ( q 1 , q 2 , q 3 ) , y = y ( q 1 , q 2 , q 3 ) , z = z ( q 1 , q 2 , q 3 ) ( 4 ) , записывается как
q 1 = q 1 ( t ) , q 2 = q 2 ( t ) , q 3 = q 3 ( t ) ( 5 ) .
Кривая радиус-вектора, описываемая концом вектора r при движении точки, совпадает с ее траекторией. Параметрическое уравнение траектории с t представлено кинематическими уравнениями ( 2 ) , ( 5 ) . Чтобы получить координатное уравнение траектории следует исключить время из кинематических уравнений.
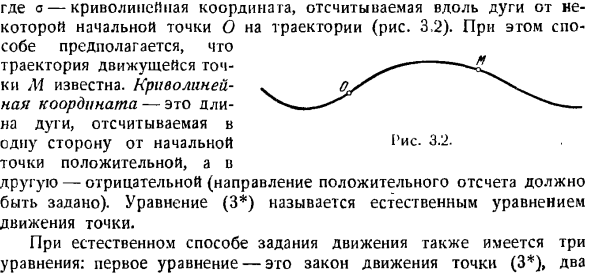
Определение движения точки возможно с помощью задания траектории и мгновенного положения точки на ней. Ее положение на кривой определяется с помощью указания только одной величины: расстояния вдоль кривой от некоторой начальной точки с положительным направлением:
Это и есть уравнение движения точки по траектории. Способ его задания относят к естественному или траекторному.
Понятия координатного и естественного способа задания движения точки физически эквивалентны. С математической стороны это рассматривают как возможность применения разных методов, исходя из случая математической задачи.
Задание такого закона возможно аналитическим, графическим путем или с использованием таблицы, последние два из которых зачастую рассматривают в виде графиков и расписаний движений поездов.
Дано уравнение движения материальной точки x = 0 , 4 t 2 . Произвести запись формулы зависимости υ x ( t ) , построить график зависимости скорости от времени. На графике отметить площадь, численно равную пути, пройденному точкой за 4 секунды, произвести вычисление.
Дано: x = 0 , 4 t 2 , t = 4 c
Найти: υ x ( t ) , S — ?
Решение
При решении необходимо учитывать зависимость скорости от времени:
υ x = υ 0 x + a x t .
Зависимость координаты от времени и сравнение уравнения с заданным принимает вид:
x = x 0 + υ 0 x t + a x t 2 2 , x = 0 , 4 t 2 .
Очевидно, что x 0 = 0 , υ 0 x = 0 , a x = 0 , 8 м / с 2 .
После подстановки данных в уравнение:
Определим точки, изобразим график:
υ x = 0 , t = 0 , υ x = 4 , t = 5

Путь, по которому двигалось тело, равняется площади фигуры, ограниченной графиком, и находится с помощью формулы:
http://www.webmath.ru/poleznoe/fizika/fizika_95_traektorija_dvizhenija.php
http://zaochnik.com/spravochnik/fizika/osnovy-dinamiki/uravnenie-dvizhenija-materialnoj-tochki/
Содержание:
Координатный способ определения движения точки:
При координатном способе определения движения точки должны быть даны уравнения движения, т. е. заданы координаты точки как функции времени:

Задание движения точки в прямоугольных координатах
Как известно из курса аналитической геометрии, положение точки M в пространстве может быть определено положением ее проекций P, Q и R на три взаимно перпендикулярные оси (рис. 84), называемые осями координат.
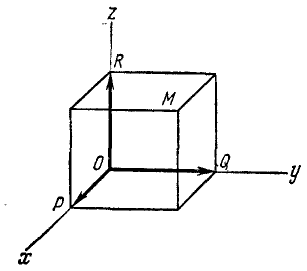
Рис. 84
Положение точки P на оси Ox вполне определяют абсциссой х. Совершенно так же положение точек Q и R определяют ординатой у и аппликатой z.
Если точка M движется относительно осей xOyz, то проекции Р, Q и R перемещаются по осям и координаты точки M изменяются.
Для определения движения точки M нужно знать ее координаты для каждого мгновения, выразить их в функциях времени.
x = x(t), (58′)
y = y(t), (58″)
z = z(t), (58″‘)
Эти функции непрерывны, так как точка не может из одного положения перейти в другое, минуя промежуточные. Они должны быть однозначны, так как точка занимает в пространстве в каждое мгновение только одно положение.
Соотношения (58) называют кинематическими уравнениями движения точки в прямоугольных координатах, а способ определения движения точки посредством соотношений (58) называют координатным способом определения движения точки. Это название неточно, потому что, кроме прямолинейных прямоугольных координат, существует множество других координатных систем.
Если траектория точки лежит в одной плоскости, то движение точки определяют двумя уравнениями в системе координат xОy: x=x(t), y=y(t).
Следовательно, при координатном способе задания движения точки в пространстве нужно задать ее три координаты, а на плоскости—две координаты как функции времени. Если точка движется прямолинейно, то, приняв прямую, по которой она движется, за ось абсцисс, мы определим движение точки одним уравнением
x = x(t).
Если движение точки задано в координатной форме, то для определения ее траектории надо из уравнений движения исключить время
Уравнение траектории
Можно определить траекторию точки, если в уравнениях движения (58) давать аргументу t различные значения и, вычислив соответствующие значения функций, отмечать положения точки по ее координатам. Следовательно. кинематические уравнения движения точки (58) можно
рассматривать как уравнения ее траектории в параметрической форме, а время — как независимый переменный параметр.
Однако более удобно получить уравнение траектории, исключив время из уравнений (58). В самом деле, траекторией называют геометрическое место всех положений движущейся точки, но в геометрии нет понятия времени, а поэтому для получения уравнения траектории нужно из кинематических уравнений движения (58) исключить время t. Если точка движется в плоскости, то, исключив время из уравнений (58′) и (58″), мы получим соотношение, связывающее х и у:
f(x, у) = 0. (59)
Это уравнение плоской кривой—траектории точки. Если же движение задано тремя уравнениями (58), то, исключив время, получим два уравнения между тремя координатами:
 (59/)
(59/)
выражающие, как известно из аналитической геометрии, кривую (траекторию) в пространстве. Точнее говоря, уравнения (59) или (59′) выражают кривую, которая полностью или в некоторой своей части является геометрическим местом всех положений движущейся точки.
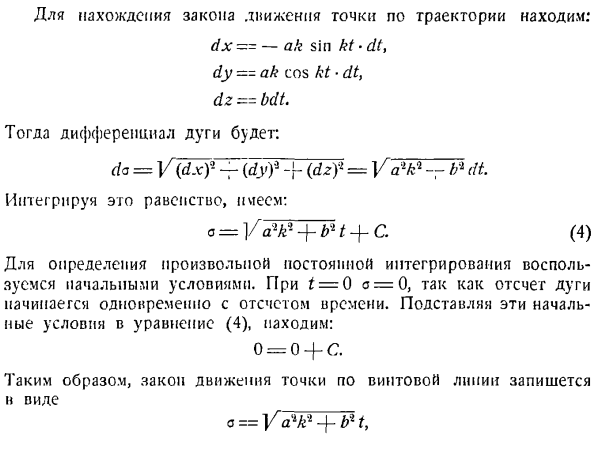
Иногда бывает нужно выразить в естественной форме движение точки, заданное в прямоугольных координатах уравнениями (58), и, кроме уравнения траектории, дать также уравнение (51) движения точки по траектории. Чтобы его получить, надо продифференцировать уравнения (58) и полученные дифференциалы координат точки подставить в известную из курса высшей математики формулу, выражающую абсолютную величину элемента дуги:
 (60)
(60)
Проинтегрировав (60), мы получим уравнение (51), выражающее длину дуги s как функцию времени, или, что то же, закон движения точки по траектории.
Задача №1
По заданным уравнениям движения точки в координатной форме найти уравнение траектории и уравнение движения по траектории:
1) х = 5 cos 2t, y = 3+5sin 2t;
2) x=21,2 sin2 t, у = 21,2 cos 2t.
В обоих примерах за единицу длины принят сантиметр, за единицу времени — секунда.
Решение. Чтобы определить уравнение траектории по уравнениям движения, перенесем во втором из заданных уравнений 3 влево, возведем оба уравнения в квадрат и, сложив, получим
x2 + (y-3)2 = 25.
Это уравнение окружности с центром в точке: x = 0, y = +3.
Чтобы получить закон движения, продифференцируем заданные уравнения: dx=—10 sin 2t dt, dy = 10 cos 2t dt.
Возводя в квадрат, складывая, извлекая квадратный корень и интегрируя, находим закон движения по траектории:
s=10t + C, где C = s0.
2) Исключим время из уравнений движения во втором примере:
x+y = 21,2.
Это уравнение первого порядка относительно х и у, следовательно, траектория-прямая линия. Прямая отсекает на положительных направлениях осей координат отрезки по 21,2 см. Однако не вся прямая служит траекторией точки: из заданных уравнений видно, что х и у должны быть всегда положительны и не могут быть больше 21,2 см каждый, поэтому траекторией точки является лишь отрезок прямой x+y = 21,2, лежащей в первом квадранте (рис. 85).
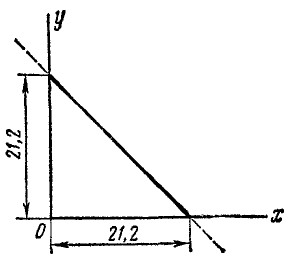
Рис. 85
На этом примере мы видим, что траекторией точки иногда является лишь часть линии, выражаемой уравнением траектории.
Продифференцируем уравнения движения:
dx = 21,2 ∙ 2 sin t cos t dt,
dy = 21,2 ∙ 2 sin t cos t dt.
Теперь no формуле (60) нетрудно найти элемент дуги траектории:

ля получения уравнения (51) движения точки по траектории остается лишь проинтегрировать найденное выражение. Интегрируем и подставляем начальные условия (при t= 0, s0 = 0):

Ответ. Уравнения траекторий x2+(y-3)2= 25 и x+y=21,2; уравнения движения по траектории s=10t+s0 и s = 30 sin 2t.
Задача №2
Движение точки задано уравнениями:
х = x’ cos φ (t)—y’ sin φ (t),
y = x’ sin φ (t) + y’ cos φ (t),
где х’ и у’ — некоторые постоянные величины, a φ(t)— любая функция времени. Определить траекторию точки.
Решение. Возведем каждое из уравнений в квадрат, а затем сложим их:
x2 + y2 = χ‘2 + y‘2.
По условию, х’ и у’ — постоянные. Обозначая сумму их квадратов через r2, получим
x2 + y2 = r2.
Ответ. Окружность с центром в начале координат радиуса  .
.
Задача №3
Поезд длиной l м сначала идет по горизонтальному пути (рис. 86, а), а потом поднимается в гору под углом 2α к горизонту. Считая поезд однородной лентой, найти траекторию его центра тяжести.
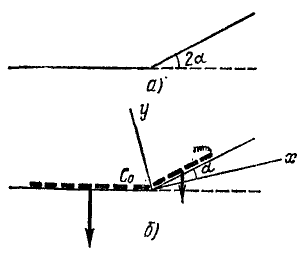
Рис. 86
Решение. Для решения задачи нужно определить координаты центра тяжести поезда, найти уравнения движения центра тяжести и исключить из них время.
Направим оси координат по внутренней и внешней равиоделяшнм угла 2α (рис. 86, б). Траектория центра тяжести поезда не зависит от скорости поезда. Для простоты подсчетов предположим, что он идет равномерно со скоростью υ м/сек и в начальное мгновение t=0 подошел к горе.
Тогда за время t сек на гору поднимется υt м состава поезда и останется на горизонтальном пути l — υt м. Будем считать, что единица длины поезда весит γ.
Применяя формулы (48), найдем координаты центра тяжести поезда:



Координаты центра тяжести представлены здесь как функции времени, следовательно, полученные соотношения являются уравнениями движения центра тяжести поезда. Определяя t (или υt) из первого уравнения и подставляя во второе, найдем уравнение траектории:

Ответ. Парабола.
Задача №4
Мостовой кран движется вдоль цеха согласно уравнению х = t; по крану катится в поперечном направлении тележка согласно уравнению у = 1,5t (х и у—в м, t — в сек). Цепь укорачивается со скоростью t>=0,5. Определить траекторию центра тяжести груза (в начальном положении центр тяжести груза находился в горизонтальной плоскости хОу, ось Oz направлена вертикально вверх).
Решение. В условии задачи даны лишь два уравнения движения и вертикальная скорость груза:

откуда dz = 0,5dt, и легко получаем третье уравнение:
z = 0,5t
Определив t из первого уравнения, подставим во второе и в третье:
y= 1,5x, z = 0,5x
Координаты груза должны удовлетворять одновременно обоим уравнениям, т. е. траектория лежит одновременно в обеих плоскостях и является линией их пересечения.
Ответ. Прямая.
Алгебраическая величина скорости проекции точки на координатную ось равна первой производной от текущей координаты по времени:

Алгебраическая величина скорости проекции точки на ось
Пусть движение точки M определяется тремя уравнениями:
x =x(t), (58′)
y = y(t), (58″)
z = z(t). (58″‘)
По мере движения точки M в пространстве ее проекции P, Q и R движутся по своим прямолинейным траекториям, т. е. по осям координат, и их движения вполне соответствуют движению точки М.
Так, координата (абсцисса) точки P всегда равна абсциссе точки М, а координаты точек QnR всегда равны ординате и аппликате точки М. Следовательно, при движении точки M в пространстве согласно уравнениям (58) точка P движется по оси Ox согласно уравнению (58′), а точки Q и R— соответственно по осям Oy и Oz согласно уравнениям (58″) и (58″‘).
Таким образом, движение точки M в пространстве можно разложить на три прямолинейных движения ее проекций P, Q и R.
Определим скорость υp точки P при движении этой точки по ее прямолинейной траектории Ох, иными словами, определим скорость проекции точки M на ось Ох.
Алгебраическая величина скорости выражается по формуле (53), причем дифференциалом расстояния точки P является дифференциал абсциссы х, а поэтому
 (61)
(61)
Следовательно, алгебраическая величина скорости проекции P точки M на координатную ось равна первой производной от текущей координаты х по времени t. Она положительна, если точка P движется в положительном направлении оси Ох, и отрицательна, если точка P движется в отрицательном направлении.
Аналогично получаем алгебраические скорости проекций Q и R на ось Oy и на ось Oz:
 (61″)
(61″)
 (61″‘)
(61″‘)
Чтобы получить векторы скоростей проекций, надо умножить величины (61) на единичные векторы:
 (61)
(61)
Алгебраическая величина скорости проекции точки на ось равна проекции скорости той же точки на туже ось:
Скорость проекции и проекция скорости
Пусть точка М за бесконечно малый отрезок времени dt передвинулась по своей траектории на элемент дуги ds, абсолютную величину которого выразим формулой (60):

где dx, dy и dz — проекции элемента дуги на оси координат, или, Что то же, элементарные приращения координат точки М.
На рис. 87 эти элементы условно изображены конечными отрезками. Как видно из чертежа, косинусы углов, составляемых элементарным перемещением (а следовательно, и скоростью точки), с осями х, у и z соответственно равны
 (62)
(62)
Величина скорости точки M может быть определена по (53):

Чтобы определить проекцию скорости  на какую-либо ось, надо умножить абсолютную величину скорости на косинус угла между направлением скорости и направлением этой оси. Таким образом, для проекций скорости точки M на оси координат имеем:
на какую-либо ось, надо умножить абсолютную величину скорости на косинус угла между направлением скорости и направлением этой оси. Таким образом, для проекций скорости точки M на оси координат имеем:
 (63′)
(63′)
 (63″)
(63″)
 (63″‘)
(63″‘)
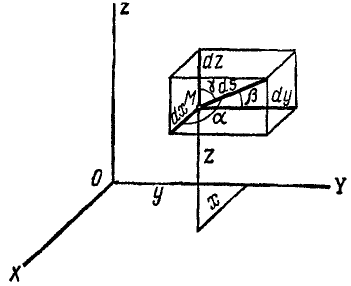
Рис. 87
Равенства (63) словами нужно читать так: проекция скорости точки на ось равна алгебраической скорости проекции точки на ту же ось.
Задача №5
Доказать, что проекция  скорости
скорости  точки M (х, у, z) иа плоскость хОу равняется скорости
точки M (х, у, z) иа плоскость хОу равняется скорости  , с которой движется по плоскости проекция M1 (х, у, О) точки M на ту же плоскость.
, с которой движется по плоскости проекция M1 (х, у, О) точки M на ту же плоскость.
Решение. Скорость точки M составляет с осью Oz угол γυ, следовательно, угол, составляемый ею с плоскостью хОу, равен 90° — yυ п косинус этого угла равен sinγυ. Поэтому модуль проекции скорости точки M на плоскость хОу
Подводя  под радикал и выражая cosγυ, по формуле (62), мы убедимся, что проекция скорости на плоскость равна по величине скорости проекции:
под радикал и выражая cosγυ, по формуле (62), мы убедимся, что проекция скорости на плоскость равна по величине скорости проекции:

Направления векторов  и
и  тоже совпадают, так как направляющие косинусы их одинаковы. Теорема доказана.
тоже совпадают, так как направляющие косинусы их одинаковы. Теорема доказана.
Модуль скорости точки равен квадратному корню из суммы квадратов проекций скорости на оси координат:
Модуль скорости. Возведем в квадрат каждое из равенств:
 (63)
(63)
и сложим их:

Сумма квадратов направляющих косинусов равна единице и

или
 (64)
(64)
Перед радикалом взят положительный знак, так как величина скорости (ее модуль) всегда положительна. В этом ее существенное отличие от алгебраической величины скорости (53), характеризующей скорость точки при движении по заданной траектории и имеющей знак « + » или «—» в зависимости от направления движения. Величину (64) иногда называют полной скоростью.
Направление скорости можно определить по направляющим косинусам скорости:

Направляющие косинусы скорости
Равенство (64) позволяет определить модуль скорости точки, движение которой задано уравнениями (58). Направление скорости определяется по косинусам углов, составляемых положительными направлениями осей координат с направлением скорости. Значения этих косинусов, называемых направляющими косинусами скорости, мы получим из уравнений (63):
 (62′)
(62′)
где  ,
,  и
и  — производные от х, у и z по t.
— производные от х, у и z по t.
Если точка движется в плоскости хОу, то γυ = 90o, cosγυ = 0 и cos αυ = sin βυ.
Задача №6
Уравнения движения суть

Определить траекторию и скорость.
Решение. Из уравнений движения следует, что х и у всегда больше нуля.
Для определения уравнения траектории возведем каждое из уравнений движения в квадрат и составим разность
x2 — у2 = a2
Для определения скорости найдем сначала ее проекции:


а затем уже и полную скорость.
Ответ. Траектория — ветвь гиперболы x2 — у2 = a2 — расположена в области положительных значений х; скорость  .
.
Задача №7
Движение точки задано уравнениями

причем ось Ox горизонтальна, ось Oy направлена по вертикали вверх, υ0, g и  —величины постоянные. Найти траекторию точки, координаты наивысшего ее положения, проекции скорости на координатные оси в тот момент, когда точка находится на оси Ох.
—величины постоянные. Найти траекторию точки, координаты наивысшего ее положения, проекции скорости на координатные оси в тот момент, когда точка находится на оси Ох.
Решение. Уравнения описывают движение тела, брошенного со скоростью υ0 под углом α0 к горизонту (к оси Ох).
Чтобы найти уравнение траектории, определим время из первого уравнения и подставим найденное значение во второе; получим
уравнение параболы, проходящей через начало координат (рис. 88).
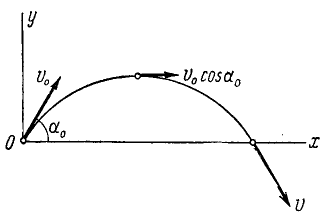
Рис. 88
Чтобы определить координаты наивысшего положения, мы можем применить известные из дифференциального исчисления правила нахождения максимума функции, т. е. взять производную  , приравняв ее нулю, определить значение х и, подставив его в уравнение траектории, определить соответствующее значение у, убедившись при этом, что вторая производная
, приравняв ее нулю, определить значение х и, подставив его в уравнение траектории, определить соответствующее значение у, убедившись при этом, что вторая производная  . Однако мы найдем координаты наивысшего положения точки другим методом, для чего, продифференцировав по времени уравнения движения точки, найдем проекции ее скорости:
. Однако мы найдем координаты наивысшего положения точки другим методом, для чего, продифференцировав по времени уравнения движения точки, найдем проекции ее скорости:

Первое из этих уравнений показывает, что проекция скорости на горизонтальную ось постоянна и равна проекции начальной скорости.
Исследование второго уравнения убеждает, что проекция скорости на вертикальную ось в начальное мгновение положительна и равна υ0 sin α0; затем, по мере увеличения t, проекция υy уменьшается, оставаясь положительной до мгновения  , когда υy обращается в нуль, после чего υy становится отрицательной, возрастая по абсолютной величине с течением времени t.
, когда υy обращается в нуль, после чего υy становится отрицательной, возрастая по абсолютной величине с течением времени t.
Таким образом, точка движется вправо, сначала поднимаясь, затем опускаясь. Мгновение  , при котором точка кончила подниматься, но еще не начала опускаться, соответствует максимальному подъему точки. В это мгновение скорость горизонтальна и
, при котором точка кончила подниматься, но еще не начала опускаться, соответствует максимальному подъему точки. В это мгновение скорость горизонтальна и  . Подставляя найденное значение t в уравнения движения, найдем координаты наивысшей точки траектории:
. Подставляя найденное значение t в уравнения движения, найдем координаты наивысшей точки траектории:

Определим проекции скорости в мгновение, когда точка находится на оси Ох. В это мгновение ордината точки равна нулю. Приравняем пулю второе из уравнений движения:

Точка находится на оси Ox два раза: при t=0 при 
Первое значение t соответствует началу движения, второе —падению точки на ось Ох. Второе значение равно времени всего полета, и оно вдвое больше полученного нами ранее времени наивысшего подъема: время падения равно времени подъема.
Подставляя значение t=0 в уравнения, определяющие проекции скорости, найдем проекции скорости в начальное мгновение:
υx = + υ0 cos α0, υy = + υ0 sin α0.
Подставляя второе из найденных значений t, найдем скорости в момент падения:
υx = + υ0 cos α0, υy = — υ0 sin α0.
Ответ: 1) Парабола 
2) 
3) υx = υ0 cos α0, υy =  υ0 sin α0.
υ0 sin α0.
причем верхний знак соответствует началу движения, а нижний—концу.
Задача №8
По осям координат (рис. 89) скользят две муфты A и B, соединенные стержнем AB длиной l. Скорость В равна υB.
При каком положении муфт скорость муфты А вдвое больше υB?
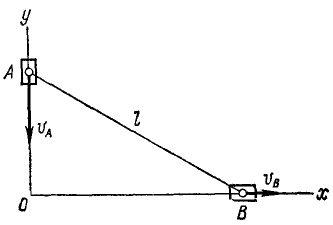
Рис. 89
Решение. Координата точки А связана с координатой точки В соотношением
Считая х и у функциями времени и продифференцировав это равенство по времени, найдем зависимость между скоростями обеих точек:
Но  и по условию надо, чтобы величина
и по условию надо, чтобы величина  была равна 2υB, т. е.
была равна 2υB, т. е.
откуда после алгебраических преобразований получаем ответ.
Ответ:  (см. задачи № 57 и 89, где даны другие решения).
(см. задачи № 57 и 89, где даны другие решения).
Проекция ускорения точки на координатную ось равна первой производной по времени от проекции скорости на ту же ось или второй производной от текущей координаты по времени:

Ускорение проекции и проекция ускорения
Ускорение характеризует изменение скорости точки в данное мгновение. Оно выражается пределом отношения изменения вектора скорости к соответствующему промежутку времени при стремлении этого промежутка времени к нулю.
Для того чтобы определить ускорение точки M при ее движении в пространстве, рассмотрим сначала движение по оси Ox точки Р, являющейся проекцией точки M на эту ось.
Пусть в некоторое мгновение t алгебраическая величина скорости точки P была υх, а в мгновение tl = t + Δt стала υx+∆υx. Тогда ускорение точки P по величине и по знаку выразится пределом
Если знаки υx и ap одинаковы, то движение точки P ускоренное, а если различны, то замедленное.
Аналогично выразятся ускорения проекций Q и R точки M на другие координатные оси:
Проекции υx, υy и υz сами являются производными по времени от координат точки, поэтому ускорения проекций можно выразить вторыми производными по времени от координат точки. Эти равенства характеризуют не только величины, но и знаки ускорений проекций. Иными словами, они выражают изменение алгебраических скоростей проекций P, Q и R в мгновение t.
Только что доказанная теорема о равенстве алгебраической скорости проекции точки на ось и проекции скорости той же точки на ту же ось справедлива для любого момента времени. Следовательно, эта теорема относится не только к скорости, но и к ее изменению в любое мгновение, т. е. к ускорению. Это значит, что написанные выше равенства выражают также проекции ax, ау и аz ускорения а точки M на оси координат Ox, Oy и Oz:
 (65)
(65)
где cosαa, cosβa и cosγa—направляющие косинусы ускорения.
Можно рассматривать эти величины (65) как векторы, направленные по осям координат:
 (65′)
(65′)
Модуль ускорения точки равен квадратному корню из суммы квадратов проекций ускорения на оси координат:
Величина ускорения при координатном способе задания движения точки
Возведем в квадрат каждое из равенств:
и затем сложим их:

откуда
 (66)
(66)
Перед радикалом взят знак плюс, так как модуль вектора—величина положительная. Ускорение точки в отличие от проекций ускорения на оси координат или на другие направления обычно называют полным ускорением. Поэтому равенство (66) можно прочитать так: величина полного ускорения точки равна квадратному корню из суммы квадратов его проекций на оси координат.
Направление ускорения можно определить по направляющим косинусам ускорения:
 ,
, 
Направляющие косинусы ускорения
Направление ускорения определяют по косинусам углов, составляемых положительными направлениями осей координат с вектором ускорения. Формулы направляющих косинусов получаем из уравнений (65):
 (67′)
(67′)
 (67»)
(67»)
 (67»’)
(67»’)
Для определения направления ускорения в каждом конкретном случае надо сначала найти ускорение проекций по (65), для чего необходимо дважды продифференцировать уравнения движения (58), затем найти величину ускорения по (66), а потом определить направляющие косинусы ускорения по (67).
Направление ускорения обычно не совпадает с направлением скорости, и направляющие косинусы (67) ускорения только при прямолинейном ускоренном движении точки постоянно равны направляющим косинусам (62) скорости.
Если точка движется в плоскости хОу, то γa = 90o, cosγa = 0, cosα0 = sin βa.
Задача №9
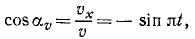
Точка M движется в системе координат хОу согласно уравнениям х= r cos πt, y=r sinπt, где х и у—в см, a t — в сек. Найти уравнение траектории точки М, ее скорость, направляющие косинусы скорости, ускорение, направляющие косинусы ускорения. Для значений времени t=0; 0,25; 0,5; 0,75, …. 2 сек дать чертежи положений точки M, вектора скорости и вектора ускорения.
Решение. Из уравнения движения видно, что координаты точки M являются проекциями на соответствующие оси радиуса-вектора r, составляющего с осью абсцисс угол πt:

Для определения траектории точки исключаем время из уравнений движения. Получаем уравнение окружности
x2 + y2 = r2
Найдем теперь проекции скорости на оси координат, для чего продифференцируем по времени уравнения движения:
откуда по (64) получаем модуль скорости
Величина скорости точки M постоянна.
Направляющие косинусы скорости определим по формуле (62′):
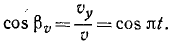
Эти соотношения показывают, что направление скорости непрерывно меняется и что скорость перпендикулярна радиусу-вектору, проведенному из центра О в точку М.
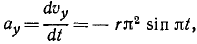
Ускорение точки M найдем по его проекциям, для чего продифференцируем выражения, полученные для проекций скорости:

откуда по (66) получаем величину ускорения

Ускорение характеризует быстроту изменения вектора скорости не только по величине, но и по направлению, поэтому, несмотря на постоянство модуля скорости точки М, ускорение этой точки не равно нулю. Как видно из полученного
Рис. 90
равенства, величина полного ускорения постоянна. Направление ускорения определим по направляющим косинусам согласно (67):

Направление ускорения точки M противоположно направлению радиуса-вектора.
Положения точки M в различные мгновения показаны на рис. 90, а, векторы скорости — на рис. 90,6 и векторы ускорения — на рис. 90, в.
Ответ. Точка M движется по окружности радиуса r против часовой стрелки с постоянной по величине скоростью υ = rπ и с постоянным по величине ускорением a = rπ2.
Задача №10
Снаряд выбрасывается из орудия с начальной скоростью υ=1600 м/сек под утлом α0 = 55o к горизонту. Определить теоретическую дальность и высоту обстрела, учитывая, что ускорение свободно падающих тел g = 9,81 м/сек2.
Решение. Сначала составим уравнения движения снаряда в координатной форме, направив оси, как показано на чертеже (см. рис. 88), для этого определим проекции ускорения:

Разделив переменные, интегрируем:
υх= С1, υy = — gt + С2
Подставляя вместо переменных величин их начальные значения, увидим, что C1 и C2 равны проекциям начальной скорости:
1600 cos 55o = C1, 1600 sin 55o = — gt + C2.
Подставим их в уравнения, полученные для проекций скорости:
Разделяя переменные и интегрируя, найдем


При t = 0 координаты снаряда были: х =0, у = 0. Подставляя эти данные, найдем, что C3 = O и C4 = O. Значения cos 55° и sin 55° найдем в тригонометрических таблицах. Уравнения движения снаряда примут вид:

Далее поступим, как при решении задачи № 42: приравняв вертикальную скорость нулю, найдем время подъема снаряда (t= 133,7 сек); подставляя это значение t в уравнение движения по оси Оу, найдем теоретическую высоту обстрела (h = 87 636 м); удваивая время /, найдем время полета снаряда (t = 267,4 сек); подставляя это значение- в уравнение движения по оси Ох, найдем теоретическую дальность обстрела (l = 245 393 м).
Ответ. l = 245 км; h = 87,5κм.
- Касательное и нормальное ускорения точки
- Основные законы динамики
- Колебания материальной точки
- Количество движения
- Пара сил в теоретической механике
- Приведение системы сил к данной точке
- Система сил на плоскости
- Естественный и векторный способы определения движения точки
-
Кинематика
2.1. Траектория, скорость, ускорение материальной точки
Траектория
точки.
Геометрическое
место последовательных положений
движущейся точки называется ее
траекторией.
Если в интервале времени
![]()
траектория
прямая линия, то движение в этом интервале
называется прямолинейным,
в противном случае движение называется
криволинейным.
С
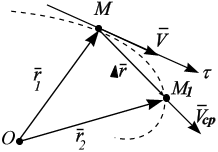
Рис.
2.1
корость точки.
Пусть
положение движущейся точки М
относительно произвольно выбранного
неподвижного центра О
определяется в момент времени t
радиус-вектором
![]()
,
который соединяет движущуюся точку М
с центром О
(рис.
2.1).
За
время
![]()
радиус-вектор изменится на
![]()
.
Мгновенная
скорость точки
![]()
в момент времени t
определяется как предел средней скорости
при t
→ 0,
т. е.
![]()
.
(2.1)
Производная
по времени от функций обозначается
точкой над символом этой функции, а
вторая производная – двумя точками.
Вектор
скорости приложен в точке М,
направлен в сторону ее движения по
предельному направлению вектора
![]()
→
0, т. е. совпадает
с касательной к траектории в точке М.
Размерность скорости в СИ:
![]()
= длина/время = м/с. Часто скорость выражают
в км/ч = 0,28 м/с.
|
Скорость |
Ускорение
точки. Пусть
движущаяся точка М
в момент времени t
имеет скорость
![]()
(рис.
2.2). В момент времени
![]()
=
t + Δt
эта точка занимает положение
![]()
,
имея скорость
![]()
.
Чтобы изобразить приращение скорости
![]()
за время Δt,
перенесем вектор скорости
![]()
параллельно самому себе в точку М,
тогда
![]()
.
Ускорением
точки
![]()
в момент времени t
называют предел, к которому стремится
среднее ускорение при Δt
→ 0, т. е.
![]()
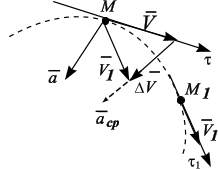
Рис.
2.2
. (2.2)
Вектор
ускорения
![]()
всегда направлен внутрь вогнутости под
любым углом к касательной к траектории
движения (рис. 2.2). Размерность ускорения
в СИ:
![]()
= длина/время2
= м/с2.
|
Ускорение – это векторная изменения |
Движение
точки на плоскости
К
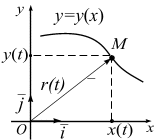
Рис.
2.3
Рис.
2.5
оординатный способ задания движения
точки. Зададим радиус-вектор
в декартовой системе координат
Оху:
![]()
.
Тогда
движение точки можно задать уравнениями
![]()
(2.3)
Уравнения
(2.3) являются уравнениями движения точки,
а также уравнениями траектории точки,
заданными параметрически. Уравнение
траектории в системе координат
![]()
будет иметь вид функции
![]()
(рис. 2.3). Для получения этой зависимости
следует из уравнений (2.3) исключить
параметр
![]()
.
Уравнение
траектории в явном виде будет иметь вид
функции
.
Скорость
и ускорение точки по модулю и направлению
вычисляются по формулам:
|
|
Содержание
контрольных работ для студентов на тему
«кинематика точки» дано в приложении
(контрольная работа 1, задача 1).
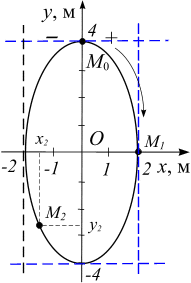
Пример
2.1. Движение
точки M
по плоскости Оху
задано уравнениями движения
![]()
.
(а)
Значения
х и
у – в
метрах. Построить траекторию движущейся
точки, вычислить скорость и ускорение
точки в моменты времени
![]()
и
![]()
.
Решение.
Для
построения
траектории движущейся точки в декартовой
системе координат определим область,
в которой движется точка, т. е. область
значений
![]()
и
![]()
.1
Так как
![]()
и
![]()
,
получаем:
![]()
Выделяем
область, ограниченную полученными
неравенствами, за эту область точка при
движении не выходит (рис. 2.4) Исключим
параметр t
из
уравнений движения (a).
Для этого делим первое уравнение на 2,
второе – на 4, возводим их в квадрат и
складываем между собой:
Учитывая,
что
![]()
,
получим:
![]()
. (б)
Траекторией
движущейся точки является эллипс (рис.
2.4). Подставляя в (а) значение
![]()
,
находим:
![]()
;
![]()
м.
Точка
в начальный момент времени занимает
положение
![]()
.
Определим
направление движения точки. Уравнения
движения (а) заданы возрастающей функцией
![]()
и убывающей функцией
![]()
,
поэтому при увеличении t
координата «х» возрастает, а «у»
убывает, следовательно, точка движется
по эллипсу по часовой стрелке.
|
Р |
Определим
(в)
Определим |

![]()

(г)
При
из (а) получаем, что точка М
имеет координаты х1
= 2,
у1
= 0, т. е.
занимает положение (рис. 2.4) М1.
Подставляя в (в) и (г) время
,
получим

Откладываем
значение скорости (рис. 2.5, а)
и ускорения (рис. 2.5, б)
точки М1
на траектории.
При
из (а) получаем, координаты точки
![]()
:![]()
![]()
.
Вычислим, используя
(в) и (г), модуль и направление векторов
скорости и ускорения.
|
|
|
|
а |
б |
|
Рис. 2.5 |
Имеем:
![]()

![]()
для
ускорения


,
![]()
.
Откладываем
значение скорости (рис. 2.5, а)
и ускорения (рис. 2.5, б)
точки
на
траектории.
Вектор
скорости точки совпадает по направлению
с касательной к траектории в точках
![]()
и
,
а вектор ускорения в точках
и
направлен во внутрь вогнутости траектории
(к центру О).
Ответ:
V1=
8 м/с,
a1=
8 м/с2;
V2=
6,3 м/с, a2=
12,6 м/с2.
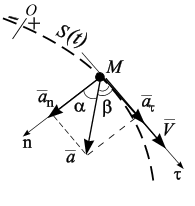
Естественный
способ задания движения точки.
|
Р |
При – траектория – начало ; – уравнение |
Примером
естественного способа задания движения
является движение поезда: траектория
и направление движения определены
рельсами, а уравнение движения задано
таблицей – расписанием движения поезда.
Движение
точки рассматривается в координатах
![]()
.
Единичный вектор
![]()
направлен по вектору скорости, единичный
вектор
![]()
перпендикулярен вектору
,
направлен по главной нормали кривой в
сторону ее вогнутости (рис. 2.6).
Скорость
точки
![]()
направлена по касательной и равна
![]()
Ускорение
![]()
точки
при
естественном способе задания движения
раскладывается на два – касательное
ускорение
![]()
,
и нормальное ускорение
:
![]()
.
Касательное
ускорение
![]()
характеризует изменение величины
скорости, нормальное
![]()
– изменение направления вектора
скорости.
|
Естественный , – касательное
– нормальное
|
Связь координатного
и естественного способов заданий
движения точки
|
|
|
Рис. 2.7 |
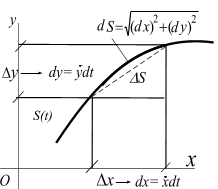
Известно,
что если
точка движется в плоскости О![]()
,
элемент дуги
![]()
связан
с приращениями координат теоремой
Пифагора (рис. 2.7):
![]()
При
![]()
имеем
![]()
,
тогда
дифференциал дуги
![]()
связан с дифференциалами функций
![]()
и
![]()
(рис.2.7):
![]()
,

(знак
+ или
совпадает со знаком
![]()
,
так как
![]()
).
Пример
2.2.
Точка
движется в плоскости
.
Уравнение движения точки задано
координатами
![]()
,
![]()
,
где
и
![]()
выражены в см,
![]()
в с.
Исходные
данные:
![]()
(см);
![]()
(см).
Требуется:
-
Записать
уравнение траектории в явном виде:

(или
). -
Построить
траекторию. -
Определить
положение точки в начальный момент
времени

и момент времени

с, направление движения точки по
траектории. -
Вычислить
вектор скорости

и вектор ускорения
точки в начальный (
)
и конечный (с) моменты времени.
-
Задать
движение точки естественным способом
(вывести закон

). -
Геометрически
и аналитически определить нормальную

и касательную

составляющие ускорения точки в начальный
и конечный моменты времени. -
Найти
радиус кривизны траектории в начальный
и конечный моменты времени.
Решение
-
Выводим
уравнение траектории в явном виде.
Из
первого уравнения системы:
![]()
;
из второго уравнения системы:
![]()
.
Получаем:
![]()
;
![]()
;
![]()
;
![]()
,
или
![]()
.
Таким
образом, получаем уравнение параболы
.
-
Строим
траекторию в масштабе

(рис. 2.8).
Ветви
параболы вытянуты вдоль оси
.
Вершина параболы:
![]()
;
![]()
см
![]()
С (−1;0).
|
, |
± |
± |
|
, |
0,5 |
5 |
-
Определяем
положение точки в заданные моменты
времени.
;
![]()
М0
(−1; 0);
с;
![]()
М1
(0,5; 1).
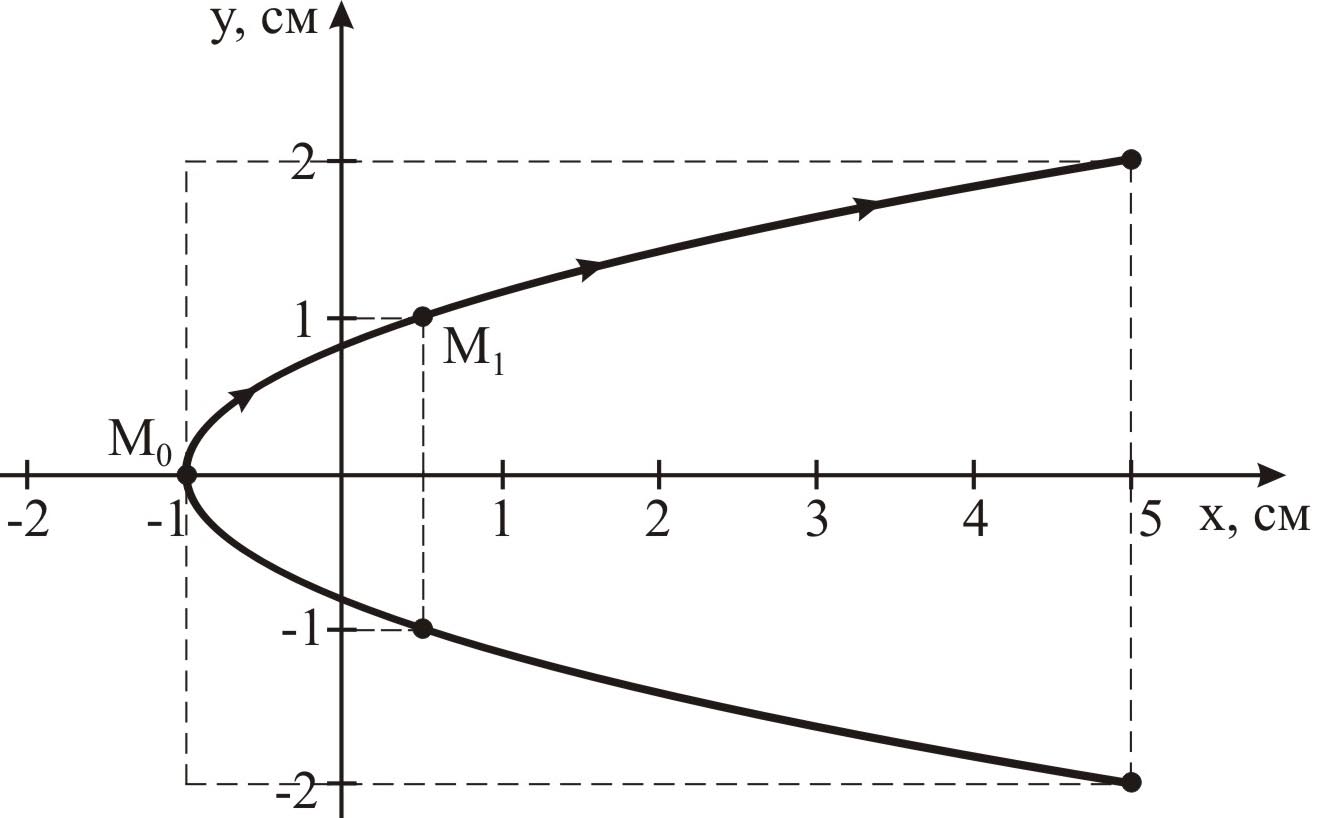
Рис. 2.8
Направление
движения точки по траектории в промежуток
времени от
с до
![]()
с определяем по уравнениям движения
![]()
и
![]()
:
-

– функция
убывающая, но она в выражении со знаком«–», значит, координата
возрастает;
-

– функция
возрастающая, значит, координатавозрастает.
Таким
образом, движение точки по параболе в
указанный промежуток времени происходит
по часовой стрелке (по верхней ветви
параболы) (рис. 2.8).
В
целом, точка совершает колебательные
движения по построенной параболе в
области, указанной пунктиром на графике
(рис. 2.8).
-
Вычисляем
скорость и ускорение для заданных
моментов времени.
Так
как движение точки задано координатным
способом, то скорость
и ускорение
определяются по их проекциям на
координатные оси (рис. 2.9).
Скорость
:

см/с;

см/с;
;
см/с;
см/с;
![]()
см/с;
с;

см/с;

см/с;
![]()
см/с;
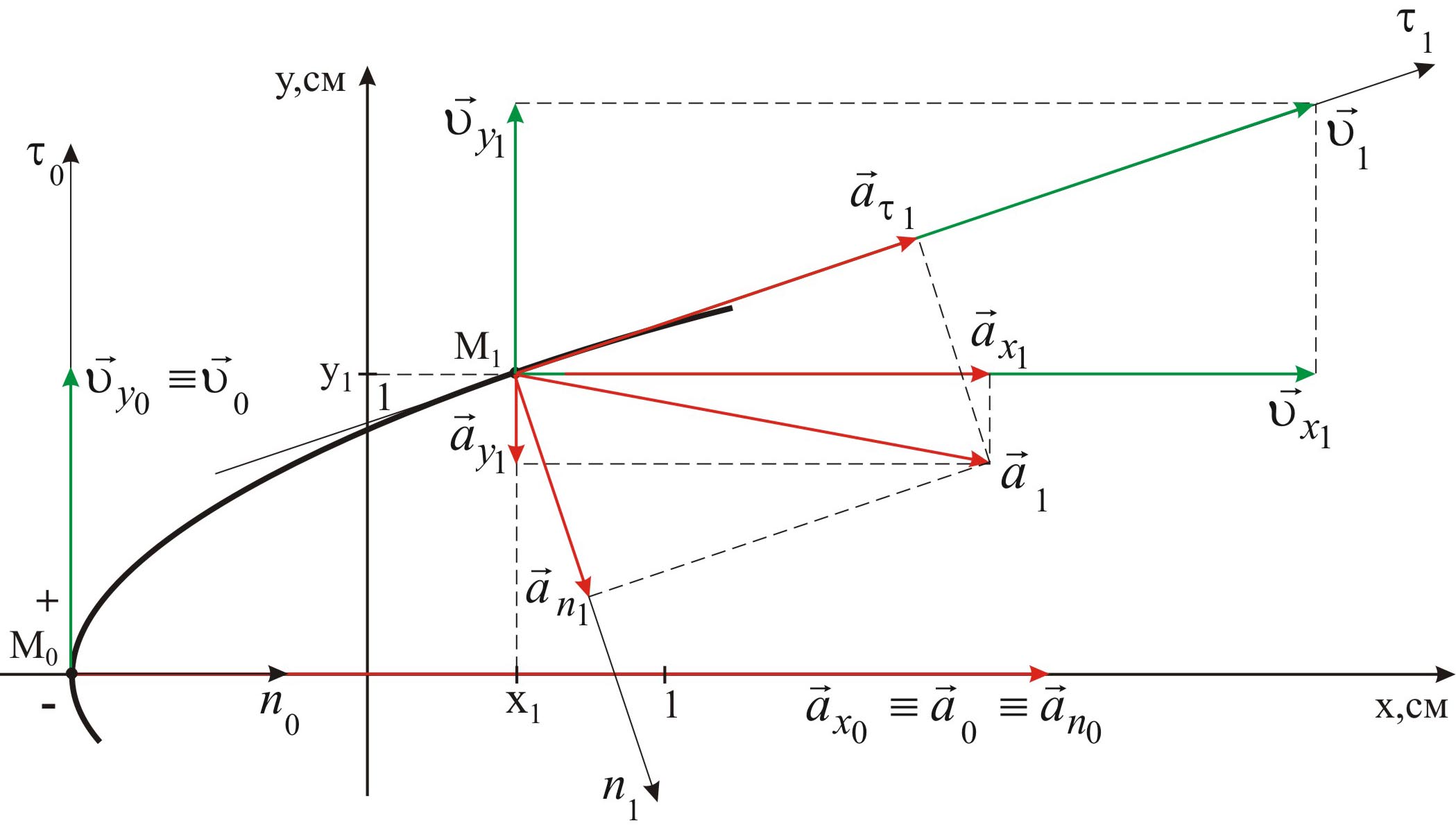
Рис. 2.9
Масштабы:
чертежа в 1 см
0,5 см; скоростей в 1 см
0,233 см/с; ускорений в 1 см
0,236 см/с2.
Ускорение
:
см/с2;

см/с2;
;
![]()
см/с2;
![]()
см/с2;
![]()
см/с2;
с;
![]()
см/с2;

см/с2;
![]()
см/с2.
Выводим
закон движения точки в естественной
форме, имеем:
![]()
.
Для
промежутка времени от
с до
с имеем:
![]()
;

=
=

,
см.
-
Вычисляем
нормальное и касательное ускорения.
а)
Аналитически:
;

см/с2;

![]()
см/с2;
с;

см/с2,
=
см/с2.
Так
как
![]()
,
![]()
,
движение точки в момент времени
с ускоренное.
б)
Графическое решение предполагает
выполнение геометрического равенства
![]()
для
соответствующего момента времени (рис.
2.9).
-
Вычисляем
радиус кривизны траектории.
Из
формулы
![]()
получаем для каждого времени
:
;
см;
с;
см.
Ответ:
|
см |
см/с |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
−1 |
0 |
0,5 |
1 |
0 |
1,05 |
1,05 |
2,7 |
0,9 |
2,8 |
|
см/с2 |
|||||||||
|
|
|
|
|
|
|
||||
|
3,3 |
0 |
3,3 |
1,6 |
−0,3 |
1,6 |
||||
|
см/с2 |
см |
||||||||
|
|
|
|
|
|
|
||||
|
граф. |
анал. |
граф. |
анал. |
граф. |
анал. |
граф. |
анал. |
||
|
0 |
0 |
3,3 |
3,3 |
1,45 |
1,45 |
0,68 |
0,68 |
0,33 |
11,53 |
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Траектория и уравнения движения точки
- Уравнение движения для локуса и точек 1°.Основные понятия. Траекторией точки называется линия, описываемая точкой движения в пространстве. Траектории могут быть плоскими или пространственными кривыми. Движение точки определяется установлением закона движения. Закон движения точек (уравнения) устанавливает зависимость расположения точек во временном пространстве.
Движение точки M в фиксированной системе координат xyz определяется установкой 3 функций (рис.3.1). * = / > ( ’). J’ = / *(<). r = / 3(0, (1 *) Присвойте уравнению (1*) значение времени t = ti для определения координат Задача 3.2. На кривошипе длина a перпендикулярна плоскости фигуры и вращается вокруг оси через точку O. угол<p между неподвижной осью Ox и кривошипом изменяется пропорционально времени. = КТ.
Это называется уравнением движения точки.
Людмила Фирмаль
Создайте уравнение движения для точки N в декартовой системе координат. Найдите уравнение его орбиты. Определяет полный 1-кратный поворот точки N и точку, в которой координаты обеих точек равны. The solution. To составьте уравнение движения точки N, необходимо представить ее координаты в виде функции времени. Из рисунка найдите координату x в точке N. Х = О с COS <Р、 y = на грех cf Или х = а соѕ kty у = грех КТ. (И (2)
Это будет искомое уравнение движения для точки N. Чтобы найти уравнение орбиты точки в явном виде, необходимо исключить время из уравнения motion. To сделайте это, квадрат каждого уравнения движения. x1 = A1 cos2 kt, y * = ar sin * kt、 (3) (4) Добавьте уравнения(3) и(4). х * + г * = в Это уравнение траектории точки N определяет окружность с радиусом вокруг начала координат.
- Определим время полного 1 поворота точки N. это время, когда происходит угол c. Оно изменяется на 2Т. Радиан.: 9 = кт = 2К、} Откуда? Найти начальное положение перемещения point. To для этого нужно подставить значения уравнений движения (1) и (2)£= 0. — v0 = a, y o = 0. Определяет точку, в которой обе координаты точки N равны друг другу. Х = Y = а соѕ КТИ = а ktif грех Иначе говоря Кей-Ти тг = 1. Это равенство возможно «1 + 5-,(5) Где я= 0、1、2、3、…
Из (5)определяется, когда координаты точек равны 。 — К. ти = = КН + РК- Задача 3.3.In в предыдущей задаче, если угол<p равен kt + P, то k и p являются постоянными величинами и определяют движение точки A4, являющейся проекцией точки N на ось Ax. Решение. Поскольку точка M движется линейно вдоль оси Ox, ее движение определяется уравнением 1. х = о соз СР = е соз(т + п).
Это уравнение линейного гармонического колебательного движения.
Людмила Фирмаль
Затем по координатам определяется максимальное отклонение точки м от центра колебаний О. МПМ = а ХІ =-а. Величина a называется амплитудой колебаний, kt — (- (J называется фазой колебаний, ap-начальной фазой колебаний. Определите период колебаний, то есть время, в течение которого точки совершают 1 полное колебание, то есть возвращаются в исходное положение с той же скоростью и величиной. Обозначим период буквой Т и найдем его значение из условия, что приращение фазы колебаний за это время равно 2π. Иначе говоря
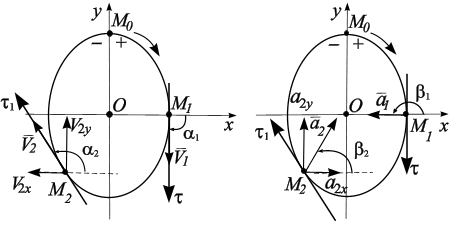
Задача 3.4.Точки перемещаются в соответствии с уравнением. x = A cos(kt-e), (1) г = Б, потому что КТ(2) Определите уравнение траектории движения точки. Как изменяется локус точек при увеличении разности фаз£от 0 до 2r? The solution. To найдя уравнение орбиты точки в явном виде, нужно исключить время из уравнения motion. To для этого сначала преобразуем уравнение движения. х = а соѕ(т-е)= а [потому что КТ потому что£-(- КТ грех грех ЭЖ.(3) решая уравнения (2) и (3) для cos kt и sin kt, получим: Х г — г соз£ а б. Преступление. потому что КТ =£о грех КТ = Добавьте эти уравнения, возведя их в квадрат. г, (т -£»»’) ’ 1 Б% ’ °1 (4) Sin2 е
Или в конце: — В + М — ^^ ко ^ грех ’、 уравнение (4) для любого значения e является уравнением эллипса. Из этого уравнения максимальные и минимальные значения являются Параметры±соответственно. a для x и zt b для y. таким образом, во всех случаях эллипс вписывается в прямоугольники со сторонами 2a и 2b. измените значение от 0 до 2ir. если e = 0, то выражение(4) принимает вид:
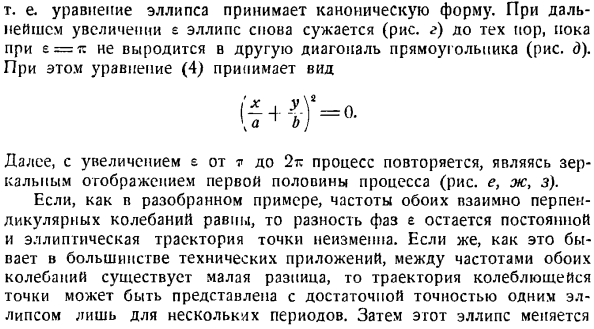
Так, если фазы обеих составляющих колебаний перпендикулярны друг другу, то эллипс вырождается в 2 совпадающие прямые, являющиеся диагоналями прямоугольника(рис.<). если е увеличить от 0 до ir / 2, то на 1 ее оси будет постепенно расширяться эллипс, направление которого совпадает с диагональю прямоугольника (рис.6). для e = it / 2 выражение(4)принимает вид)
То есть, эллиптическое уравнение принимает каноническую форму. при дальнейшем увеличении s овалы снова сужаются в своих отверстиях(рис. D), а при e = m вырождаются в другую диагональ прямоугольника (рис. E). в этом случае уравнение (4)принимает вид: Далее, если увеличить s от, процесс повторяется и становится зеркальным отражением первой половины процесса (рисунок E, EHU h). Как и в анализируемом примере, частоты обоих колебаний перпендикулярны друг другу
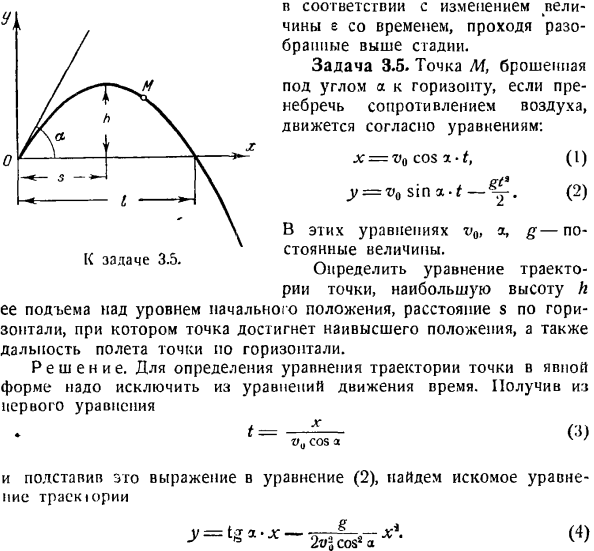
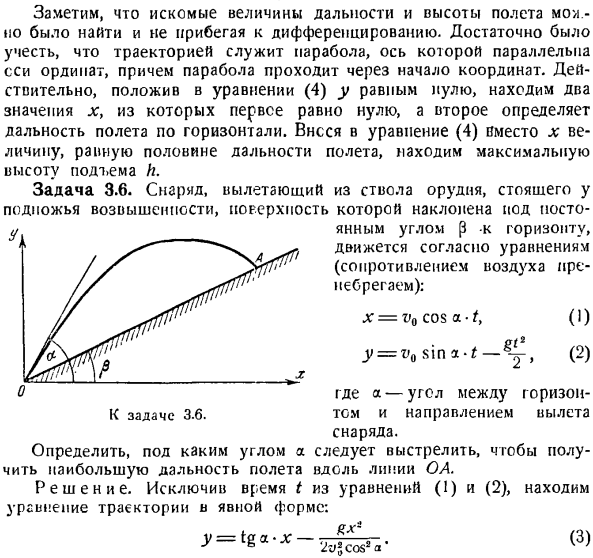
’/ х * я Дж — *- Я-В К задаче 3.5. В зависимости от изменения n т. е функционирует через этапы декомпозиции, описанные выше. Задача 3.5.Игнорируя сопротивление воздуха, точка м, брошенная под углом а относительно горизонта, движется согласно уравнению. 0) (2) О г = v0 в грехе л-т- В этих уравнениях v0, a, g являются фиксированной величиной.
Определите уравнение траектории движения точки, максимальную высоту подъема от уровня начального положения h, горизонтальное расстояние, до которого точка достигает наивысшего положения s, и горизонтальное расстояние точки. The solution. To определив уравнение орбиты точки в явном виде, необходимо исключить время из уравнения движения. Получаем из первого уравнения Т = — (3) х = вентиляционно-перфузионное потому что•Т、 гт. *
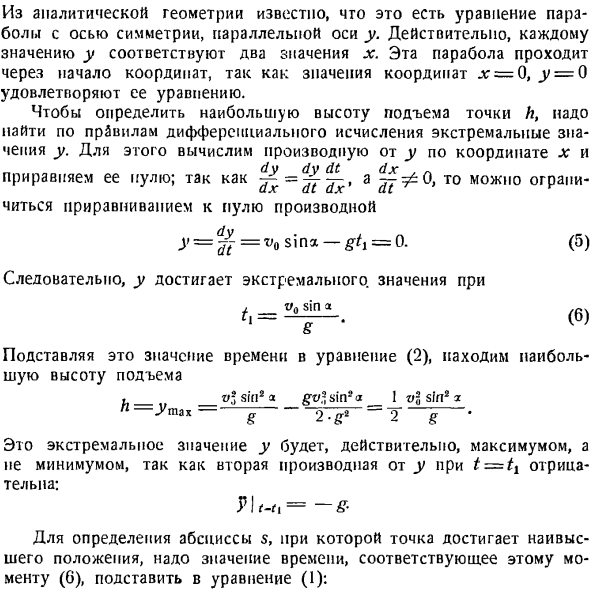
Подставляя это уравнение в уравнение(2), Находим орбитальное уравнение, представляющее интерес. г = ТГА-х- (4) л. » 2v’I cos2 a Из аналитической геометрии известно, что это уравнение параболы с осью симметрии, параллельной оси y axis. In дело в том, что каждому значению y соответствует 2 значения x. так как значения координат η== 0 и y = 0 удовлетворяют уравнению, то эта парабола проходит через начало координат.
Чтобы определить максимальный уровень точки A, нужно найти экстремум y по правилам дифференциала calculus. To для этого вычислите производную y относительно координаты x、 d v dv dt dx L-это то же самое, что и ее пуля. Потому что это может быть ограничено Равна производной пули У = / F = в Синоу-накопителей =0.(5) Таким образом, y достигает следующего экстремума. =(6)
Подставляя значение этого времени в Формулу(2), Находим максимальную поднятую высоту. , _ vl грех * в г. *!Я * в 1 г%sin2 д ~~ Uth-g 2GT—2-g ’ этот экстремум y на самом деле является максимумом, а не минимумом, потому что 2-я производная y при t = t1 отрицательна. П ш,= — с- Для определения абсциссы s, в которой точка достигает наивысшего положения, необходимо подставить в Формулу (1) значение времени, соответствующее этому моменту (6). во грех а вл грех 21 5 = г, = р> в коса -> -= учитывая it_y = 0, горизонтальная дальность полета I определяется из орбитального уравнения (4).
log A x cos2 a следовательно 2 значения x Т / л грех 2а х0 = 0, ХН = 1 = 8. Первое значение соответствует первому моменту (моменту отправления точки), А второе определяет горизонтальное расстояние. Сравнивая значения /и 5, можно сделать вывод, что/ = 2s, то есть точки достигают наивысшего положения в диапазоне горизонтальной половины. Итак, положение точки в пространстве в этой точке.
Уравнение (1) представляет собой параметрическое уравнение траектории a point. To найдя уравнение орбиты точки в координатной форме, нужно исключить время из уравнения(1) и получить форму зависимости. БФ,(Ци, г)= 0, 9а, КР, з)= 0. Комбинация этих 2 уравнений определяет кривую, по которой перемещаются точки. Есть и другие способы указать движение points. In векторным методом, определяющим законы движения, радиус-вектор r движущейся точки M (рис.3.1) задается как функция времени r = r (t).Связь между радиус-вектором r и Декартовыми координатами точки представлена уравнением Р = ХІ * — ый + ЗК. (2 ) Где i, j и k-единичные векторы (единичные векторы) осей. (2)
Если вы получаете x, y> z, текущие координаты точки A4, как определено y. уравнение(1), то (2) x Дайте закон движения точек в векторной форме. 3-й способ задания движения точек называется natural. In в этом случае движение точек определяется уравнением а = /(<), (3 ) Обратите внимание, что вы можете найти нужный диапазон и высоту, не прибегая к differentiation.
It достаточно было учесть, что орбита представляет собой параболу, параллельную продольной координатной оси, а парабола проходит через origin. In дело в том, что если в выражении (4) y установить его равным нулю, то получится 2 значения x. первое значение равно нулю, а второе определяет дальность горизонтального полета. Если вместо x в уравнении (4) ввести значение, равное половине дальности полета, то получится максимальная высота подъема I. Задача 3.6.Снаряд, вылетающий из ствола пушки, стоящей у подножия холма, наклоняется на определенный угол Р йода относительно поверхности горизонта и движется согласно уравнению(игнорируя сопротивление воздуха). x = v0cosa•(1) O ’ где A-горизонтальный угол 3.6 для.
Объем и направление отправления Оболочка. Определите, под каким углом нужно вести огонь, чтобы получить наибольшую дальность полета по линии ОА. Решение. Если вы исключите уравнение (I) и время t из (2), вы найдете явную форму орбитального уравнения. г = ТГА-ЛГ -.. UL(3) Откуда? ctg2a = — ТГП、 Или 9а — — — й-3-2 и г」 Таким образом, максимальным диапазоном будет угол броска, равный половине угла между вертикалью(отрицательной осью y)и градиентом OA. Задача 3.7.Точки, которые брошены наискось относительно горизонта, движутся в воздухе. Его сопротивление пропорционально скорости, согласно формуле. Г = ФК〜( ь я н «+ я)(1-е -*») — Ж.(2) В этих уравнениях v0t, a, k, g являются положительными константами.
И после простой трансформации — Injl — ^ — х). (4) kg V0 COS <1)4 ′ Подставим (3) и (4) в выражение(2), чтобы получить выражение траектории точки в явном виде. _ kv0 грех о + 1 1/1 _ _ х Ъ-КН. с ^ Я Х в. потому что в НД koQC () S3 1 k2g VQ COS i Чтобы определить максимальную высоту h от начального положения уровня, необходимо найти максимальное значение величины y, которое рассматривается как функция x-coordinate.
To для этого нужно вычислить 1-ю производную, согласно правилам дифференциального исчисления Т ды ды ДТ ДХ. Л. Динат x и сделать его равным нулю. ^ = ^ — И-φ、 Вы можете ограничить производную координаты y равным нулю по времени. Значение независимой переменной-время tx, найденное из этого уравнения, подставляется в уравнение(2). найдено максимальное или минимальное значение Y. Если 2-я производная от y отрицательна в этой точке, то экстремум найденного y является максимумом, а противоположный случай-минимумом. Используйте уравнение(2) для вычисления производной y по времени, равной нулю. p =(v0 sin a + l-1 = 0.
И затем… е〜4ч-1. koQ sin a-f 1 ′ или интернет = ^ ьп(* х / 0sina4-л). Если подставить эти значения в Формулу(2), то после простого преобразования найдем экстремальные значения 。 вентиляционно-перфузионное грех 1. 。 。В первой половине года. Угол = h -lln (kvQ Sin a + l). Вычислите производную 2-го порядка от y, чтобы убедиться, что найденное значение действительно является самым большим Р =-кг (v0 в Си н а 4-е ЖЖ-КГТ. поскольку ky g, r / 0 является положительным числом, а угол a находится в Q1, производная 2-го порядка отрицательна. Кроме того, определите, какая абсцисса точки достигнет наибольшей position.
To для этого достаточно подставить значение времени th, которое соответствует наивысшему положению точки в Формуле (1).Тогда у нас есть: _ PtfCOSaЛ _ 1 _ _ _ v%sin2a кг kv0 Sin в-Ф-1 г(kv0 грех, а-j-я)* Можно использовать уравнение траектории точки (5) для получения уравнения, определяющего горизонтальную дальность полета. Если положить координату y = 0 в уравнение (5), то 1 из значений X удовлетворяет трансцендентному уравнению грех + ’1 в F 1-х)= — о,(6)
И так далее. гг, с ФТ я ба-л ы г ы м я в Т / 0COSa 1 кг качеству звука, потому что буква » и Джей Си!== 0; это значение соответствует началу эстрального периода от начала координат в первый момент.2-е значение xb, являющееся корнем формулы (6), определяет горизонтальный диапазон. Это значение можно получить следующими способами Решение уравнения(6). для этого необходимо построить функцию для известных чисел с коэффициентами kt g, v0, q F(х)= Фет / У от греха-Ф-
По качеству звука потому что — — — Х * В, Дж, потому что Дж т. к. Постройте значения x вдоль горизонтальной оси и постройте соответствующие значения f / x на вертикальной оси. Точка пересечения этой кривой и оси абсцисс дает 2-й корень формулы (b), то есть горизонтальную дальность полета. 2°.Переход от уравнения движения в декартовых координатах к естественному уравнению движения.
Если уравнение движения точки задано в декартовых координатах (Я) Х-ФЛ(т) и V = ф(т), з = ФЗ(0 Если вы хотите найти уравнение движения естественным путем, то вам нужно сначала определить траекторию движения точки, а затем найти законы движения этой точки вдоль траектории. Уравнение точечной орбиты получается путем удаления времени из уравнения движения (1). чтобы найти закон движения a = / ( / ), необходимо воспользоваться известной формулой для дифференциала Дуг. ±д ^ ДС = г (файлы DXF +(dyf-ф(у dzy — = МФ * ( * )+/; ’(Т)+ / 3 Ф.) ДТ(2 *)
При интеграции вы увидите следующее: а =±j в ВФ *(0(1Ф)+ / г(0 ДТ + С.(3 ) Любая интегральная константа C выводится из начального условия. Например, если трек начинается с начальной позиции точки, то f = 0 = салат ромэн.) (2) Подсчитав расстояние от первой позиции, определите уравнение траектории движения точки и ее законы. The solution. To получаем уравнение траектории движения точки, находим его из уравнения(1) потому что * =£(3) Подставим уравнение (2) в уравнение (3).
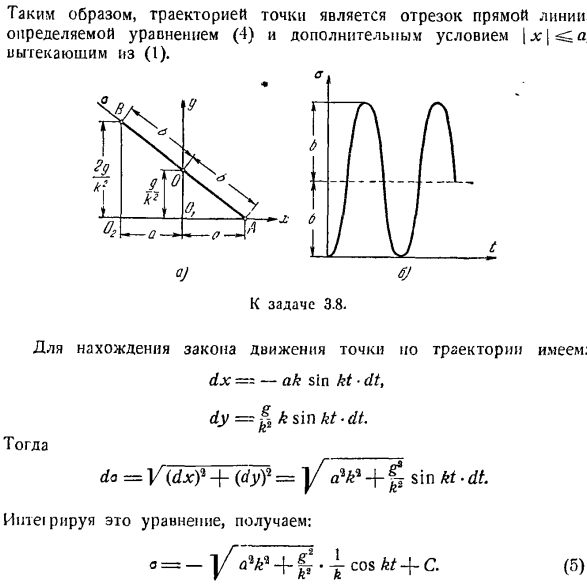
Итак, траектория точки представляет собой отрезок прямой, который определяется дополнительными условиями, вытекающими из формул(4) и (1). К задаче 3.8. Чтобы найти законы движения локуса точек wo, можно сделать следующее: ДХ — АК греха КТ * ДТ、 4Г =&к греху КТ-ДТ. После этого、_ у = в (ДХ) ’+(Д-Г?= Y aW + sin kt * dt. By уравновешивая это уравнение, оно выглядит так: Поскольку, согласно условиям задачи, координаты a вычисляются из начального положения точки,
Если/ = 0 a = 0, то подставляя эти значения в (5), получаем: 0 = _iAw + гл + с、 Откуда? С-Я / .Ш + Ф. Введите значение любой найденной константы C в формулу (5), и вы увидите закон движения точки по траектории. а = 1 + Ф3 — (я-потому что ЛО. Это уравнение гармонического колебательного движения точки.
По качеству звука потому что — — — Х * В, Дж, потому что Дж т. к. Постройте значения x вдоль горизонтальной оси и постройте соответствующие значения f / x на вертикальной оси. Точка пересечения этой кривой и оси абсцисс дает 2-й корень формулы (b), то есть горизонтальную дальность полета. 2°.Переход от уравнения движения в декартовых координатах к естественному уравнению движения. Если уравнение движения точки задано в декартовых координатах (Я) Х-ФЛ(т) и V = ф(т), з = ФЗ(0
Если вы хотите найти уравнение движения естественным путем, то вам нужно сначала определить траекторию движения точки, а затем найти законы движения этой точки вдоль траектории. Уравнение точечной орбиты получается путем удаления времени из уравнения движения (1). чтобы найти закон движения a = / ( / ), необходимо воспользоваться известной формулой для дифференциала Дуг. ±д ^ ДС = г (файлы DXF +(dyf-ф(у dzy — = МФ * ( * )+/; ’(Т)+ / 3 Ф.) ДТ(2 *)
При интеграции вы увидите следующее: а =±j в ВФ *(0(1Ф)+ / г(0 ДТ + С.(3 ) Любая интегральная константа C выводится из начального условия. Например, если трек начинается с начальной позиции точки, то f = 0 = салат ромэн.) (2) Подсчитав расстояние от первой позиции, определите уравнение траектории движения точки и ее законы. The solution. To получаем уравнение траектории движения точки, находим его из уравнения(1) потому что * =£(3) Подставим уравнение (2) в уравнение (3).
Итак, траектория точки представляет собой отрезок прямой, который определяется дополнительными условиями, вытекающими из формул(4) и (1). К задаче 3.8. Чтобы найти законы движения локуса точек wo, можно сделать следующее: ДХ — АК греха КТ * ДТ、 4Г =&к греху КТ-ДТ. После этого、_ у = в (ДХ) ’+(Д-Г?= Y aW + sin kt * dt. By уравновешивая это уравнение, оно выглядит так: Поскольку, согласно условиям задачи, координаты a вычисляются из начального положения точки,
Если/ = 0 a = 0, то подставляя эти значения в (5), получаем: 0 = _iAw + гл + с、 Откуда? С-Я / .Ш + Ф. Введите значение любой найденной константы C в формулу (5), и вы увидите закон движения точки по траектории. а = 1 + Ф3 — (я-потому что ЛО. Это уравнение гармонического колебательного движения точки.
Где A-криволинейная координата, измеренная вдоль дуги от некоторой начальной точки O на орбите (рис. 3.2).С помощью этого метода траектория движущейся точки является K и M известны. Криволинейная координата — это длина начальной односторонней дуги Дело в том, что и、 Другой-отрицательный (нужно указать направление положительной ссылки).
Уравнение (3) называется естественным уравнением движения. В естественном способе установки движения, есть также 3 уравнения. Первое уравнение-это точка ((3), 2 Рисунок 3.2. Точка O (центр вибрации), в которой происходит вибрация, является расстоянием 。Амплитуда колебаний от исходного положения В момент времени t = 0, находится в крайних точках l. время t = R. in j2k, при COS KT = 0, точка находится в центре колебаний O. In время t = njk, потому что кт — 1, точка находится во 2-м крайнем положении точки B. Графически движение точек показано на рисунке.。
Строится фигура и траектория движения лба. На рисунке b показана зависимость j или времени Задача 3.9.Точка M перемещается по следующему уравнению: х = соѕ кт, (1) у = грех кт, (2) з = БТ, (3) Где а, к и B-константы. Путем подсчета расстояния от начального положения точки. Определите уравнение локуса точек и закон движения точек вдоль локуса The solution. To определите уравнение траектории движения точки, найдите время из уравнения(3)и добавьте это значение к (1) и(2).И затем… к К задаче 3.9. Х =О.
Потому что в Z、 г = грех по Г по З. Это спиральное уравнение. Из уравнений (1), (2) видно, что проекция точки на плоскость xy представляет собой круг времени 2njk. За это время, проекция точки на ось Z будет двигаться следующим образом в 2р ч Икс’ Это называется винтовой шаг. На поверхность цилиндра радиуса а намотана спираль. Найдите следующее, чтобы найти закон движения точки вдоль траектории. ДХ—а / г грех КТ•ДТ, ды =-Ак, потому что КТ•ДТ, ДЗ == БДТ.
Затем дуга стала следующей. DY = в (дх) ° —(dyf (dzf = / / дт. Когда вы консолидируете это equality. It выглядит так 0 = 1 / aW + Pt + C(4) Для определения произвольной интегральной константы используйте начальное условие. t = 0, o = 0, потому что arccant начинается в то же время, что и time cant. Если подставить эти начальные условия в Формулу(4), то найдем: 0 = 0 — / / — С. Итак закон движения точки по спирали、
Если вы хотите считать положительные значения-против часовой стрелки. Движение происходит против часовой стрелки по спирали: точка x0 = м, Дж / 0 = 0, 20=.It начинается с 0. Овладеть навыками решения задач, редактирования и изучения уравнения движения, а также определения траекторий движения точек, И. В.。Мещерский, из издания»сборник задач теоретической механики» с 1950 года рекомендует решать следующие задачи: 3д、312、314、 315、317、318、320、321。
Поскольку кривая в пространстве представлена уравнением 2 поверхностей, то остальные уравнения определяют траекторию движения точки. Это траектория точки. Среди других систем координат, используемых при исследовании motion. In в полярной системе координат (рис. 3.3) положение точки в плоскости определяется длиной отрезка прямой, соединяющего радиус p-неподвижный центр O и точку перемещения M, и углом между неподвижной линией Ox, (полярной осью) и отрезком OM
. In в этом случае уравнение плоского движения точки M Рисунок 3.3. (4 ) Я буду.: Р = P(т),<р = < >(). Сферические и цилиндрические координаты часто используются для изучения движения точки в пространстве. Сферическими координатами точки M (рис.3.4) являются расстояние r точки M от неподвижного центра O, угол φ (угол поворота плоскости zOM относительно неподвижной плоскости xOz) и угол ? =?(’) * (5 *)
Уравнение движения для цилиндрических координат: р = п(о> т = м р = РЗ). (си *) м г Так… 1. Рисунок 3.4. Да. Чтобы перейти от сферических координат к декартовым, используйте следующую формулу:> х = р с с COS <Р соз ф, г-т с с COS <Р грехом Ф, З = Р грех <п.
Формула для перехода от цилиндрических координат к ортогональным декартовым координатам: х = р соз Ф, У = р грехом Ф, з = з В отличие от декартовых, сферических и цилиндрических систем координат, они называются криволинейными системами координат. Уравнение движения точки может быть представлено графически. Если независимая переменная t (время) строится по абсциссе, а координаты движущейся точки-по ординате, то на графике получается кривая зависимости координаты от времени, то есть уравнение движения.
Такой график должен быть составлен для каждой из 3-х координат, определяющих движение точки в пространстве. График движения является、(3 *)、(4 *)、или вы также можете построить его, установив закон движения по-другому. Уравнение движения точки может быть приведено в виде таблицы, в которой каждому значению координаты соответствует каждое дискретное значение во времени.
Решение задачи определения законов движения и уравнения орбиты осуществляется в следующем порядке: 1) выбирается фиксированная система координат-прямоугольная, Полярная или другая; 1 или другая система с источником выбирается исходя из условий задачи, поэтому дальнейшее решение является максимально простым. 2) на основе условия задачи выбранной системы координат составляется уравнение движения точек. То есть найдена временная зависимость координат точки. 3) уравнение движения точки позволяет определить ее положение в любой момент времени, установить направление ее движения, найти траекторию и ответить на различные вопросы о движении точки.
Задача 3.1.Точка M совершает плоское движение в соответствии с уравнением. * = 6 — {3 т(я) г = 4Т. (2) Определите траекторию движения точки M. Решение. Найдите орбитальное уравнение в координатной форме, удалив время из обоих уравнений движения. Из 2-го уравнения получаем t = yj4.Подставляя это значение в первое уравнение движения, получаем уравнение орбиты ДГ = 6 + 0.7 бу. Это уравнение прямой линии. Примечание y = 0, jc = 6, x = 0, y = −8 для создания этой строки.
На чертеже найдите точки A (6.0) и B (0, −8), через которые проходит указанная линия. Однако не вся эта бесконечная прямая будет представлять собой траекторию движения точки М. определите местоположение точки М в начальный момент времени t = 0.Это значение времени подставляется в уравнения движения (1) и (2)、 Положение точки: xQ = 6, j / 0 =().Таким образом, точка М начинает двигаться из точки А.
из уравнения движения, с увеличением времени, координаты точки М становятся положительными и растут. Если ’ hack, t = I, то координаты точки M будут: x = 9, y =4.Найдите эту точку на траектории и обозначьте ее буквой C. Таким образом, локус точки M будет представлять собой полустрочку ACD. Другая половина линии AB не является траекторией точки M.
В линейном движении точки уравнений движения упрощаются, когда координатные оси объединяются с локусом. Найти уравнение движения для точки MU, если начало координат выбрано в точке A, а в начальном положении движущейся точки L1 ось xx направлена в следующем направлении. Y, 4, 8. — И/ ■ 6 1 1 ■ ■ g * 0 −2-4 g^, b / ✓ / / / 8 10 12 6 я J / / / в г. /
К задаче 3.1. Оси полуосей ACDy и yv перпендикулярны ей. Затем, из треугольника ace, используйте уравнение движения (1), (2) и узнайте ниже. x] =(x-6) ’ + Y = 9+ 1 B t2 = 251 Следовательно、 Си = ±51.(3) Знак минус (3) должен быть отброшен, так как точка M движется в положительном направлении xif axis. So, уравнение движения для точки M в новой системе координат выглядит следующим образом: = бу уу = 0. Для линейного движения точки, по существу, мы получили 1 уравнение движения. — 1 0 О! , Икс Отправьте свое сообщение этому поставщику Задание 3.2-3.3.
Смотрите также:
Предмет теоретическая механика
