§ 1.2. Уравнение движения груза, подвешенного на пружине
Согласно второму закону Ньютона произведение массы тела m на ускорение  равно действующей на тело силе
равно действующей на тело силе  :
:
m = . (1.2.1)
Второй закон Ньютона (1.2.1) непосредственно описывает движение тела, размеры которого не оказывают существенного влияния на характер движения. В таком случае тело можно считать материальной точкой.
Чтобы записать второй закон Ньютона для проекций на оси координат, надо выбрать подходящую систему отсчета, относительно которой уравнение движения выглядит особенно просто и потому удобно для решения. Далее надо выяснить, как модули и направления сил зависят от положения (координат) тела и его скорости. Если тело движется вдоль прямой, как в случае колебаний груза на пружине, то сделать это нетрудно.
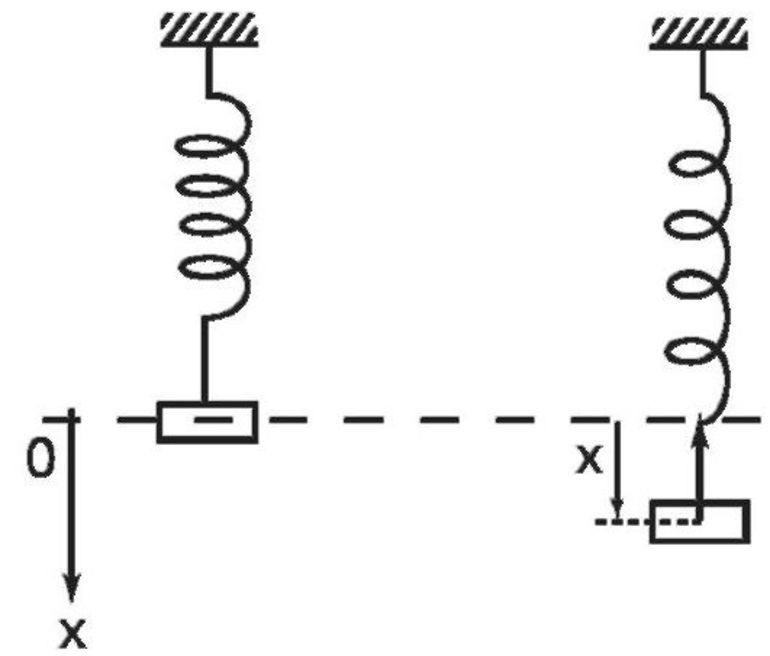
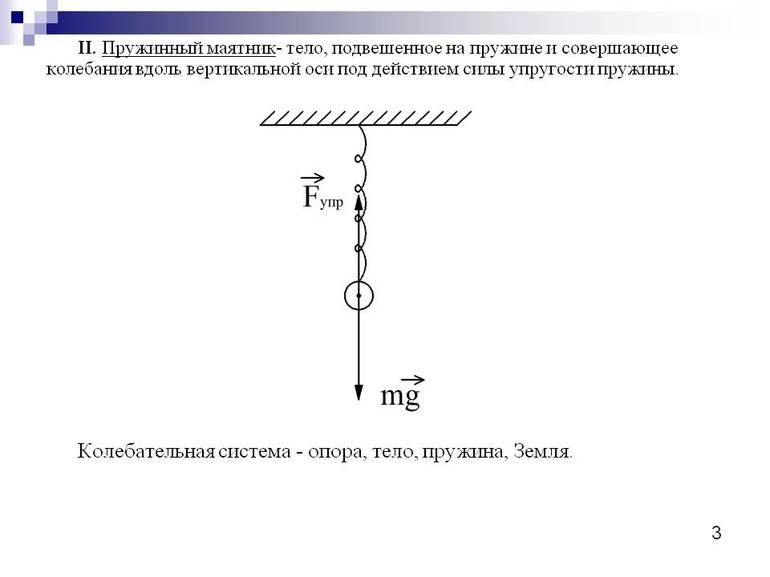
Запишем уравнение движения для груза на пружине. На груз действует сила упругости у и сила тяжести = m . Действием трения пренебрежем. Направим ось X вертикально вниз (рис. 1.7).
. Действием трения пренебрежем. Направим ось X вертикально вниз (рис. 1.7).

Начало отсчета (точку О) выберем на уровне положения равновесия. В положении равновесия пружина растянута на величину x0, значение которой определяется из закона Гука: kx0 = mg, где k — жесткость пружины, m — масса груза, a g — ускорение свободного падения. Отсюда
 (1.2.2)
(1.2.2)
Проекция силы упругости

где x — координата груза относительно положения равновесия. Величина x0 + х представляет собой удлинение пружины (см. рис. 1.7).
Уравнение движения груза запишется так:

Подставляя в это уравнение значение x0 из выражения (1.2.2), получим окончательно:

Уравнение движения не содержит силы тяжести. Сила тяжести, действуя на груз, вызывает растяжение пружины на постоянную величину. Но это не влияет на характер движения груза. Просто колебания происходят относительно положения равновесия тела при растянутой на x0 пружине. В отсутствие тяготения уравнение движения (1.2.4) имело бы точно такую же форму, но только колебания происходили бы относительно конца нерастянутой пружины. Наличие силы тяжести несущественно для колебаний груза на пружине в отличие от колебаний маятника.
Масса m и жесткость пружины k — постоянные величины. Разделив левую и правую части уравнения (1.2.4) на m и введя новое обозначение


Это уравнение колебаний груза на пружине. Оно очень простое: ускорение груза прямо пропорционально его координате X, взятой с противоположным знаком. Самым замечательным является то, что такие же (с точностью до обозначений) уравнения описывают свободные колебания самых различных систем, в частности колебания математического маятника.
Постоянная ω0 имеет важный физический смысл. Как мы впоследствии увидим, — это циклическая частота колебаний груза. Она выражается в секундах в минус первой степени.
Колебания груза на пружине — формулы, уравнения и задачи
Общие сведения
Колебания — это изменения какой-либо величины в точности или приблизительно повторяющиеся во времени. Если рассматривать процесс, с точки зрения механики, то он описывается положением тела. Повторение в точности является периодическим. Математически это можно записать формулой: x (t + T) = x (t), где T — время, в течение которого совершается одно полное колебание (период). Число циклов принято обозначать буквой N. Его находят как отношение времени к периоду: N = t / T.
При исследовании процесса не всегда бывает удобно оперировать временем, поэтому часто используют число колебаний за единицу времени. Эта величина называется частотой. Находят её количество по формуле: f = 1 / T. Доказать справедливость приведённого равенства просто. Число колебаний зависит от времени и частоты: N = f * t. Отсюда: f = N / t = (t / T) / t = 1 / T.
Очень важно не только понимать суть характеристик колебания, но и знать единицы его измерения. Вот основные из них:
- период — секунды (с);
- частота — герцы (Гц);
- число колебаний — безразмерная величина.
Если в течение времени меняется и координата, то периодически будет изменяться и скорость. Значит: vx (t + T) = Vx (t).
Исходя из верности равенства, можно сказать, что условие периодичности будет справедливо и для проекции, то есть изменения ускорения. Отсюда следует, что сила действующая на тело тоже будет переменной: Fx (t + T) = Fx (t).
При процессе также происходит изменение потенциальной и кинетической энергий. Действительно, так как в процессе колебания скорость не является постоянной величиной, то соответственно будет меняться кинетическая работа. Потенциальная же энергия зависит от координат. Например, если рассмотреть период колебаний пружинного маятника, то за это время тело переместится из нижнего положения в верхнее и вернётся обратно. Значит, координата физического объекта изменится от нуля до какого-то граничного значения.
Следует отметить, что периодичные движения обязательно будут происходить в той системе, в которой есть положение равновесия. Причём оно должно быть устойчивым. То есть существует равнодействующая сила, стремящаяся привести объект в положение, соответствующее покою. Поэтому для поддержания отклонений нужна дополнительная сила. Колебательную систему (осциллятор) под действием вынужденной периодической силы называют вынужденной.
Пружинный маятник
Это устройство является простейшим примером свободных колебаний. В его состав входит кронштейн, пружина и груз. В качестве последнего может выступать любое физическое тело. Масса пружины по сравнению с грузом считается малой и при исследованиях не учитывается.
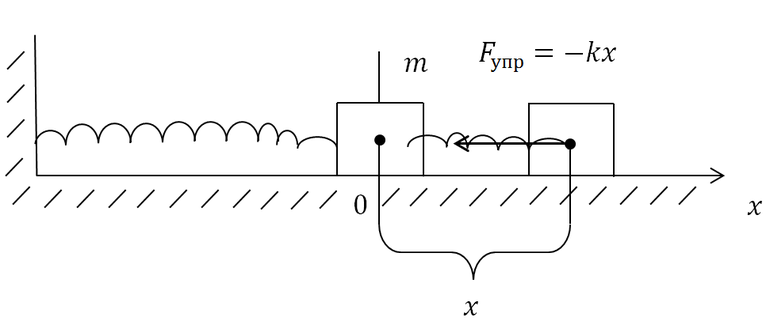
При изучении такой системы важной задачей является измерение периода движения тела, подвешенного к пружине. Определение понятию пружинного маятника, которое даётся в учебниках по физике довольно обобщённое. Считается, что это конструкция, в которой тело, имеющее массу m, подвешено на упругой пружине обладающей жёсткостью K. При этом из состояния равновесия систему может вывести упругая сила F = — k * x, где: x- расстояние от середины пружинного элемента до поверхности прикреплённого к нему груза.

Можно выделить два достаточных условия возникновения свободных колебаний:
- Во время отклонения тела от положения равновесия должна возникать возвращающая сила.
- Силы сопротивления (трения) должны быть малы по сравнению со стремящей вернуть энергией тело назад.
Суть изучения гармонических колебаний состоит в определении их частоты движения или периода. В пружинном маятнике, впрочем, как и в любой колебательной системе, параметры зависят от ряда характеристик. Из основных величин, описывающих процесс, можно выделить: массу груза и жёсткость. Поэтому задача и состоит в выяснении, как период зависит от этих двух параметров.
Во время экспериментов регулировать массу довольно легко. Для этого можно взять эталонные гири и, соединяя их, увеличивать вес. Жёсткость же пружины можно изменить, добавляя параллельно или последовательно к ней другое сжимающееся тело. Чтобы выяснить, как будет изменяться характеристика растягивающегося элемента, нужно знать, что же представляет собой параметр. Так, под жёсткостью тела понимают отношение силы упругости к удлинению: k0 = F / Δ L. Измеряется величина в ньютонах, делённых на метр (Н/м).
Исходя из правила, если соединить две пружины параллельно и деформировать их, то можно утверждать, что первый и второй элемент растянется на одинаковую длину ΔL. Значит, возникнет две одинаково направленных силы упругости. Отсюда равнодействующая будет равняться: K = 2F/ ΔL = 2k0. Для последовательного же соединения длина всей системы увеличится на 2 ΔL. Сила упругости будет равна F. Соответственно, жёсткость будет изменяться по формуле: K = F / 2ΔL = k0 / 2.
Зависимость периода
При проведении эксперимента можно исследовать пять различных комбинаций поведения груза на пружине — два варианта связаны с весом и три с жёсткостью. Чтобы выполнить опыт самостоятельно нужно будет взять вертикальный кронштейн, две одинаковые пружины и два равных по весу груза. Так как в реальности период будет довольно маленький, то для его измерения можно взять время, например, пятидесяти колебаний, а потом полученный результат разделить на это число. Подсчёт времени удобно выполнять с помощью секундомера.
Вычисленные результаты нужно занести в таблицу. Примерный порядок чисел должен получиться таким:
| k m | m0 | 2m0 |
| k0 / 2 | 0,68 | 0,93 |
| k0 | 0,46 | 0,64 |
| 2k0 | 0.34 | 0,47 |
Эти данные можно проанализировать. Выводы будут следующими:
- с ростом массы физического тела период цикличности увеличивается;
- по мере увеличения жёсткости период колебаний уменьшается.
Приведённые утверждения, возможно, описать и количественно. Исходя из результатов, величины, стоящие в ячейке m0k0 и 2m02ko почти совпадают. С точки зрения физики, так и должно быть. Если взять грузик на пружине и измерить характеристику, а потом добавить к нему точно такую же систему, то период не поменяется. Это и можно наблюдать во время опыта. Значит, период движения зависит от того каким будет отношение массы к жёсткости.
По аналогии можно рассмотреть, как влияет жёсткость. Из эксперимента, видно, что если её увеличить дважды на одну и ту же величину, то она возрастёт в четыре раза, а значение обратное частоте уменьшится на это же число. Отсюда можно предположить, что период будет обратно пропорционален корню квадратному из жёсткости.
Объединив эти две гипотезы можно сделать заключение. Что период амплитуды колебаний груза на пружине будет прямо пропорционален корню квадратного из отношения массы к жёсткости: T = √(m / k). Проверить это утверждение можно по теории размерности. Подставив в формулу единицы измерения, получим: √(m / k) = √(кг / (Н/м)) = √(кг * м / Н). Учитывая, что ньютон — это отношение метра к секунде в квадрате или килограмму, умноженному на метр и делённому на секунду, размерное равенство примет вид: √(кг * м/Н) = √(c 2 * м/м) = √с 2 = с.
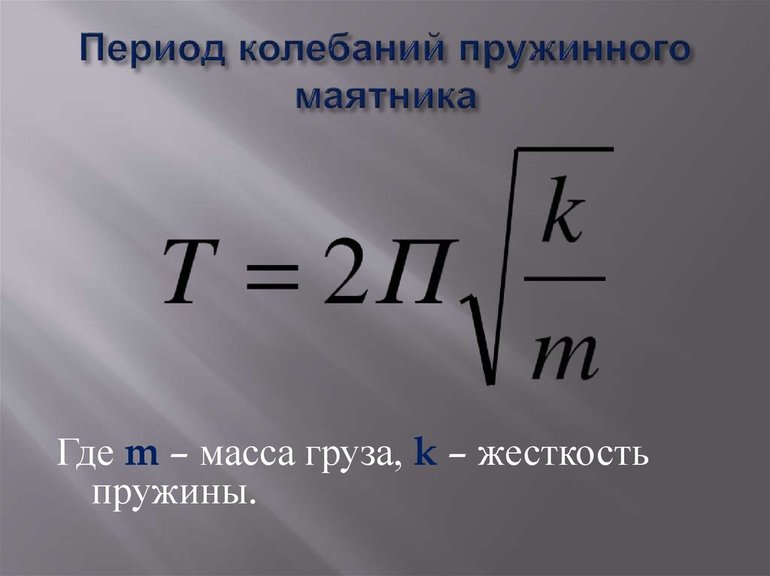
Для написания полной формулы в равенство нужно вести ещё коэффициент. Он будет равняться 2p. Значит, период колебаний пружинного маятника количественно описывается выражением: T = 2p * √ (m / k).
Примеры решения задач
Практические задания помогают лучше разобраться в теоретическом материале и запомнить нужные для решения формулы. Существуют различные примеры, с помощью которых можно довольно быстро проработать весь изученный курс. Вот два задания с подробным описанием решения на вычисления параметров пружинных колебаний тела. Разобравшись в них, можно переходить к самостоятельному вычислению более сложных примеров.
Задание № 1. Груз, подвешенный к пружине, перемещается циклически по вертикальной оси. За восемь секунд он совершил тридцать два колебания. Определить частоту. Итак, по условию задания дано время t = 8 c и число полного перемещения тела N = 32. Чтобы решить эту задачу нужно воспользоваться формулой нахождения периода: T = t / N. Все величины для этого есть: T = 8 c / 32 = 1 / 4 = 0,25 секунды. Частота связана с периодом выражением: f = 1 / T. После подстановки чисел получится ответ равный четырём герцам.
Задание № 2. Грузик совершает колебания на пружине с жёсткостью сто ньютон на метр. При этом максимальная скорость движения составляет два метра в секунду. Вычислить массу тела учитывая, что максимальная амплитуда отклонения от точки покоя составляет десять сантиметров. Силой трения пренебречь.
При решении примера нужно рассуждать следующим образом. Когда будет максимальное растяжение пружины, то скорость груза равна нулю: V1 = 0. Значит, кинетическая энергия тоже будет нулевой: Ek1 = 0.
В этот момент останется только потенциальная энергия вытянутой пружины Ep1. В положении равновесия скорость тела максимальная и равняется V = 2 м/с. Так как пружина в этот момент нерастянута и несжатая, то Ep = 0.
По закону сохранения энергии: Ek1 + Ep1 = Ek + Ep. Кинетическая работа при растянутой пружине равняется нулю, так же как и потенциальная в состоянии покоя, значит, Ep1 = (k * L 2 ) / 2, где L — удлинение, а k — жёсткость. Энергию же можно найти так: Ek = mV 2 / 2. Так как тело совершает колебания около положения равновесия, то вытянутость пружины будет равняться амплитуде.
Перед тем как непосредственно переходить к составлению итоговой формулы и вычислениям необходимо все значения измерений привести в соответствии с СИ. Так, амплитуда указана в сантиметрах, поэтому её нужно перевести в метры. Теперь можно переходить к составлению отношения и подстановки данных: (k * L 2 ) / 2 = mV 2 / 2. Отсюда: m = (k * L) / V 2 = (100 Н/м * 0,1 2 м) / 2 2 м/с = 1 / 4 = 0,25 килограмма.
Динамические уравнения и законы движения груза на пружине
Свободные колебания совершаются под действием внутренних сил системы после того, как система была выведена из положения равновесия.
Для того, чтобы свободные колебания совершались по гармоническому закону, необходимо, чтобы сила, стремящаяся возвратить тело в положение равновесия, была пропорциональна смещению тела из положения равновесия и направлена в сторону, противоположную смещению (см. §2.1):
В этом соотношении – круговая частота гармонических колебаний. Таким свойством обладает упругая сила в пределах применимости закона Гука:
Силы любой другой физической природы, удовлетворяющие этому условию, называются квазиупругими .
Таким образом, груз некоторой массы , прикрепленный к пружине жесткости , второй конец которой закреплен неподвижно (рис. 2.2.1), составляют систему, способную в отсутствие трения совершать свободные гармонические колебания. Груз на пружине называют линейным гармоническим осциллятором .
 |
||
| Рисунок 2.2.1.
Круговая частота свободных колебаний груза на пружине находится из второго закона Ньютона: откуда
Частота называется собственной частотой колебательной системы. Период гармонических колебаний груза на пружине равен
При горизонтальном расположении системы пружина–груз сила тяжести, приложенная к грузу, компенсируется силой реакции опоры. Если же груз подвешен на пружине, то сила тяжести направлена по линии движения груза. В положении равновесия пружина растянута на величину , равную и колебания совершаются около этого нового положения равновесия. Приведенные выше выражения для собственной частоты и периода колебаний справедливы и в этом случае. Строгое описание поведения колебательной системы может быть дано, если принять во внимание математическую связь между ускорением тела и координатой : ускорение является второй производной координаты тела по времени : Поэтому второй закон Ньютона для груза на пружине может быть записан в виде или
где Все физические системы (не только механические), описываемые уравнением (*), способны совершать свободные гармонические колебания, так как решением этого уравнения являются гармонические функции вида Уравнение (*) называется уравнением свободных колебаний . Следует обратить внимание на то, что физические свойства колебательной системы определяют только собственную частоту колебаний или период . Такие параметры колебательного процесса, как амплитуда m и начальная фаза , определяются способом, с помощью которого система была выведена из состояния равновесия в начальный момент времени. Если, например, груз был смещен из положения равновесия на расстояние и затем в момент времени отпущен без начальной скорости, то m = , . Если же грузу, находившемуся в положении равновесия, с помощью резкого толчка была сообщена начальная скорость Таким образом, амплитуда m свободных колебаний и его начальная фаза определяются начальными условиями . Существует много разновидностей механических колебательных систем, в которых используются силы упругих деформаций. На рис. 2.2.2 показан угловой аналог линейного гармонического осциллятора, совершающий крутильные колебания. Горизонтально расположенный диск висит на упругой нити, закрепленной в его центре масс. При повороте диска на угол возникает момент сил упругой деформации кручения: Это соотношение выражает закон Гука для деформации кручения. Величина аналогична жесткости пружины . Второй закон Ньютона для вращательного движения диска записывается в виде (см. §1.23) где – момент инерции диска относительно оси, проходящий через центр масс, – угловое ускорение. По аналогии с грузом на пружине можно получить: Крутильный маятник широко используется в механических часах. Его называют балансиром. В балансире момент упругих сил создается с помощью спиралевидной пружинки. источники: http://nauka.club/fizika/kolebaniya-gruza-na-pruzhine.html http://physics.ru/courses/op25part1/content/chapter2/section/paragraph2/theory.html |





 то
то 

Формулы пружинного маятника в физике
Формулы пружинного маятника
Определение и формулы пружинного маятника
Определение
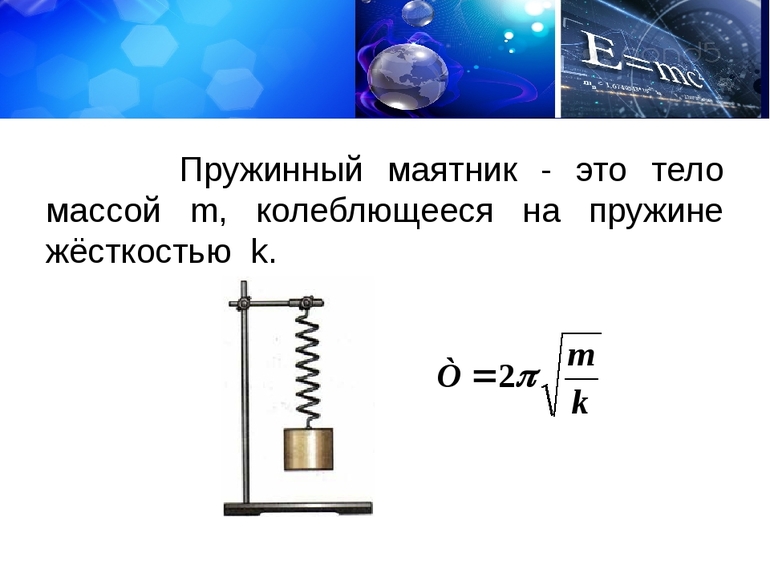
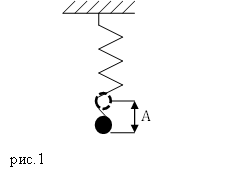
Пружинным маятником называют систему, которая состоит из упругой пружины, к которой прикреплен груз.
Допустим, что масса груза равна $m$, коэффициент упругости пружины $k$. Масса пружины в таком маятнике обычно не учитывается. Если рассматривать вертикальные движения груза (рис.1), то он движется под действием силы тяжести и силы упругости, если систему вывели из состояния равновесия и предоставили самой себе.
Уравнения колебаний пружинного маятника
Пружинный маятник, совершающий свободные колебания является примером гармонического осциллятора. Допустим, что маятник совершает колебания вдоль оси X. Если колебания малые, выполняется закон Гука, то уравнение движения груза имеет вид:
[ddot{x}+{omega }^2_0x=0left(1right),]
где ${щu}^2_0=frac{k}{m}$ — циклическая частота колебаний пружинного маятника. Решением уравнения (1) является функция:
[x=A{cos left({omega }_0t+varphi right)=A{sin left({omega }_0t+{varphi }_1right) } }left(2right),]
где ${omega }_0=sqrt{frac{k}{m}}>0$- циклическая частота колебаний маятника, $A$ — амплитуда колебаний; ${(omega }_0t+varphi )$ — фаза колебаний; $varphi $ и ${varphi }_1$ — начальные фазы колебаний.
В экспоненциальном виде колебания пружинного маятника можно записать как:
[Re tilde{x}=Releft(Acdot exp left(ileft({omega }_0t+varphi right)right)right)left(3right).]
Формулы периода и частоты колебаний пружинного маятника
Если в упругих колебаниях выполняется закон Гука, то период колебаний пружинного маятника вычисляют при помощи формулы:
[T=2pi sqrt{frac{m}{k}}left(4right).]
Так как частота колебаний ($nu $) — величина обратная к периоду, то:
[nu =frac{1}{T}=frac{1}{2pi }sqrt{frac{k}{m}}left(5right).]
Формулы амплитуды и начальной фазы пружинного маятника
Зная уравнение колебаний пружинного маятника (1 или 2) и начальные условия можно полностью описать гармонические колебания пружинного маятника. Начальные условия определяют амплитуда ($A$) и начальная фаза колебаний ($varphi $).
Амплитуду можно найти как:
[A=sqrt{x^2_0+frac{v^2_0}{{omega }^2_0}}left(6right),]
начальная фаза при этом:
[tg varphi =-frac{v_0}{x_0{omega }_0}left(7right),]
где $v_0$ — скорость груза при $t=0 c$, когда координата груза равна $x_0$.
Энергия колебаний пружинного маятника
При одномерном движении пружинного маятника между двумя точками его движения существует только один путь, следовательно, выполняется условие потенциальности силы (любую силу можно считать потенциальной, если она зависит только от координат). Так как силы, действующие на пружинный маятник потенциальны, то можно говорить о потенциальной энергии.
Пусть пружинный маятник совершает колебания в горизонтальной плоскости (рис.2). За ноль потенциальной энергии маятника примем положение его равновесия, где поместим начало координат. Силы трения не учитываем. Используя формулу, связывающую потенциальную силу и потенциальную энергию для одномерного случая:
[E_p=-frac{dF}{dx}(8)]
учитывая, что для пружинного маятника $F=-kx$,
тогда потенциальная энергия ($E_p$) пружинного маятника равна:
[E_p=frac{kx^2}{2}=frac{m{{omega }_0}^2x^2}{2}left(9right).]
Закон сохранения энергии для пружинного маятника запишем как:
[frac{m{dot{x}}^2}{2}+frac{m{{omega }_0}^2x^2}{2}=const left(10right),]
где $dot{x}=v$ — скорость движения груза; $E_k=frac{m{dot{x}}^2}{2}$ — кинетическая энергия маятника.
Из формулы (10) можно сделать следующие выводы:
- Максимальная кинетическая энергия маятника равна его максимальной потенциальной энергии.
- Средняя кинетическая энергия по времени осциллятора равна его средней по времени потенциальной энергии.
Примеры задач с решением
Пример 1
Задание. Маленький шарик, массой $m=0,36$ кг прикреплен к горизонтальной пружине, коэффициент упругости которой равен $k=1600 frac{Н}{м}$. Каково было начальное смещение шарика от положения равновесия ($x_0$), если он при колебаниях проходит его со скоростью $v=1 frac{м}{с}$?
Решение. Сделаем рисунок.
По закону сохранения механической энергии (так как считаем, что сил трения нет), запишем:
[E_{pmax}=E_{kmax }left(1.1right),]
где $E_{pmax}$ — потенциальная энергия шарика при его максимальном смещении от положения равновесия; $E_{kmax }$ — кинетическая энергия шарика, в момент прохождения положения равновесия.
[E_{kmax }=frac{mv^2}{2}left(1.2right).]
Потенциальная энергия равна:
[E_{pmax}=frac{k{x_0}^2}{2}left(1.3right).]
В соответствии с (1.1) приравняем правые части (1.2) и (1.3), имеем:
[frac{mv^2}{2}=frac{k{x_0}^2}{2}left(1.4right).]
Из (1.4) выразим искомую величину:
[x_0=vsqrt{frac{m}{k}}.]
Вычислим начальное (максимальное) смещение груза от положения равновесия:
[x_0=1cdot sqrt{frac{0,36}{1600}}=1,5 cdot {10}^{-3}(м).]
Ответ. $x_0=1,5$ мм
Пример 2
Задание. Пружинный маятник совершает колебания по закону: $x=A{cos left(omega tright), } $где $A$ и $omega $ — постоянные величины. Когда возвращающая сила в первый раз достигает величины $F_0,$ потенциальная энергия груза равна $E_{p0}$.
В какой момент времени это произойдет?
Решение. Возвращающей силой для пружинного маятника является сила упругости, равная:
[F=-kx=-kA{cos left(omega tright)left(2.1right). }]
Потенциальную энергию колебаний груза найдем как:
[E_p=frac{kx^2}{2}=frac{kA^2{{cos }^2 left(omega tright) }}{2}left(2.2right).]
В момент времени, который следует найти $F=F_0$; $E_p=E_{p0}$, значит:
[frac{E_{p0}}{F_0}=-frac{A}{2}{cos left(omega tright) }to t=frac{1}{omega } arc{cos left(-frac{2E_{p0}}{AF_0}right) }.]
Ответ. $t=frac{1}{omega } arc{cos left(-frac{2E_{p0}}{AF_0}right) }$
Читать дальше: формулы равноускоренного прямолинейного движения.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Условие. Найти
уравнение движения груза, а также
скорости и ускорения груза и точки М
(рис. 7) в момент времениt=t1, еслиR2=
80 см,r2= 50 см,R3=
40 см, х0= 6 см,v0=
10 см/с, х2= 256 см,t1=
3 с,t2= 5 с,r3=R3/2 = 20 см.

Рис. 7
Решение:
1. Уравнение
движения груза 1 имеет вид
х = C2t2+ C1t+ С0. (1)
Коэффициенты С0,
С1и С2могут быть определены
из следующих условий:
при t0= 0 х0= 6 см,![]() 0=v0= 10 см/с; (2)
0=v0= 10 см/с; (2)
при t2= 5с х2= 256 см. (3)
Скорость груза 1
v =![]() = 2 С2t + С1. (4)
= 2 С2t + С1. (4)
Подставляя (2) и
(3) в выражения (1) и (4), находим коэффициенты
С0= 6 см, С1=
10 см/с, С2= 8 см/с2.
Таким образом,
уравнение движения груза 1 имеет вид
x=8t2+10t+6. (5)
Скорость груза 1
v=![]() = 16t+ 10. (6)
= 16t+ 10. (6)
Ускорение груза
1
a=![]() = 16 см / с2.
= 16 см / с2.
2. Для определения
скорости и ускорения точки М запишем
уравнения, связывающие скорость груза
vи угловые скорости колес![]() и
и![]() .
.
В соответствии со
схемой механизма

откуда

или, с учетом (6)
после подстановки данных,
![]()
Угловое ускорение
колеса 3
![]() рад /с2.
рад /с2.
Скорость точки М,
ее вращательное
![]() ,
,
центростремительное![]() и полноеамускорения
и полноеамускорения
определяются по формулам
![]()
![]() ;
;
![]()
![]() .
.
Результаты
вычислений для заданного момента времени
t1= 3 с
приведены в табл. 6.
Таблица 6
|
v, |
а, см /с2 |
|
|
vм, |
|
|
|
58 |
16 |
1,81 |
0,5 |
72,5 |
20,0 |
131,4 |
Скорости и ускорения
тела 1 и точки М показаны на рис. 8.

Рис. 8
Задача 4. Тема «Плоское движение твердого тела»
Поскольку
задача 4 относится
к теме «Плоское движение твердого тела»
[1, 127-130, 132], скорость ползуна для данного
положения механизма можно вычислить с
помощью мгновенного центра скоростей
шатуна. Для этого необходимо знать
скорость какой-нибудь точки шатуна
(например точки А) и направление скорости
ползуна.
Ускорение ползуна
в данный момент времени можно найти с
помощью векторной формулы распределения
ускорений точек плоской фигуры,
спроектировав ее на два взаимно
перпендикулярных направления. В качестве
полюса удобно принять точку А.
Условие.Кривошип ОА длинойRвращается вокруг неподвижной оси О с
постоянной угловой скоростьюи приводит в движение шатун АВ длиной
![]() и ползун В. Для заданного положения
и ползун В. Для заданного положения
механизма найти скорости и ускорения
ползуна В и точки С, а также угловую
скорость и угловое ускорение звена,
которому эта точка принадлежит.
Схемы механизмов
приведены на рис. 9, а необходимые для
расчета данные – в табл. 7.
|
1 |
|
2 |
|
|
3 |
|
4 |
|
|
5 |
|
6 |
|
|
7 |
|
8 |
|
|
9 |
|
10 |
|


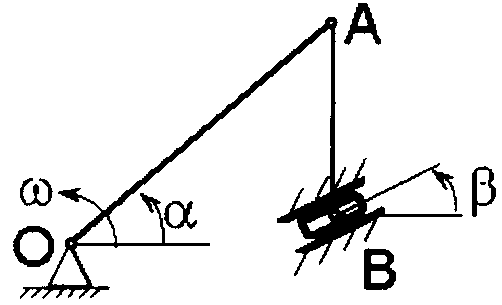







Рис. 9. Схемы
к задаче 4
Таблица 7
|
Цифра шифра |
1-я |
2-я |
3-я |
||||
|
R, |
|
, град |
, град |
, c-1 |
Номер схемы |
АС |
|
|
1 |
20 |
30 |
30 |
60 |
10 |
1 |
0,2 (АВ) |
|
2 |
24 |
36 |
45 |
30 |
9 |
2 |
0,3 (АВ) |
|
3 |
30 |
40 |
60 |
45 |
8 |
3 |
0,4 (АВ) |
|
4 |
36 |
48 |
30 |
15 |
7 |
4 |
0,5 (АВ) |
|
5 |
40 |
50 |
45 |
60 |
6 |
5 |
0,6 |
|
6 |
48 |
56 |
60 |
15 |
5 |
6 |
0,7 (АВ) |
|
7 |
50 |
60 |
30 |
45 |
4 |
7 |
0,6 (АВ) |
|
8 |
56 |
64 |
30 |
30 |
3 |
8 |
0,5 (АВ) |
|
9 |
60 |
70 |
45 |
15 |
2 |
9 |
0,4 (АВ) |
|
0 |
64 |
80 |
60 |
60 |
1 |
10 |
0,3 (АВ) |
Примечание. Если
при заданных значениях углов окажется,
что шатун АВ перпендикулярен направляющим
ползуна (см. рис. 9, схемы 1, 6), то значение
угла
следует принять равным 15.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Содержание:
- Законы динамики
- Первый закон или закон инерции
- Второй закон или основной закон динамики
- Третий закон или закон равенства действия и противодействия
- Четвертый закон или закон независимости действия сил
- Прямая (основная) задача динамики
- Порядок решения прямой задачи динамики материальной точки
- Примеры решения задач
- Задания темы Д1
- Пример решения задания Д1а
- Задания Д1б
- Пример решения задания Д1б
- Обратная задача динамики и её решение
- Порядок решения обратной задачи динамики материальной точки
- Примеры решения задач
- Задания темы Д2
- Пример решения задачи темы Д2
- Колебания и динамика относительного движения материальной точки
- Колебания материальной точки
- Фаза вынужденных колебаний
- Амплитуда вынужденных колебаний
- Явление резонанса
- Порядок решения задач на колебательное движение материальной точки
- Примеры решения задач
- Сжатые сведения по теории динамики относительного движения материальной точки
- Переносная сила инерции
- Порядок решения задач динамики относительного движения материальной точки
- Примеры решения задач
- Задания темы Д3
- Пример решения темы Д3
- Теоремы о движении центра масс и об изменении количества движения механической системы
- Порядок решения задач на применение теоремы о движении центра масс
- Примеры решения задач
- Теоремы об изменении количества движения материальной точки и механической системы
- Порядок решения задач на применение теоремы об изменении количества движения точки и механической системы
- Примеры решения задач
- Задания темы Д4
- Пример решения темы Д4
- Теорема о смене кинетической энергии механической системы
- Теорема об изменении кинетической энергии материальной точки в интегральной форме
- Порядок решения задач на применение теоремы об изменении кинетической энергии в интегральной форме
- Примеры решения задач
- Задания темы Д5
- Пример решения темы Д5
- Принцип даламбера
- Принцип Даламбера для материальной точки
- Принцип Даламбера для механической системы
- Приведение сил инерции точек твердого тела к простому виду
- Порядок решения задач на применение принципа Даламбера
- Примеры решения задач
- Задание темы Д6
- Пример решения темы Д6
- Дополнительные лекции и примеры по теме «Динамика»
- Законы динамики, уравнения движения материальной точки. принцип даламбера
- Пример решения задачи 1.14
- Принцип ДАламбера
- Силы, действующие на точки механической системы
- Теорема о движении центра масс механической системы
- Пример решения задачи 1.15.
- Краткие исторические сведения о динамике
- Динамика и ее основные задачи
- Законы Ньютона
- Первый закон Ньютона (закон инерции)
- Второй закон Ньютона (основной закон динамики)
- Третий закон Ньютона (закон равенства действия и противодействия}
- Дифференциальные уравнения движения свободной материальной точки
- Две основные задачи динамики свободной материальной точки
- Прямая или первая, основная задача
- Обратная, или вторая, основная задача
- Уравнения движения несвободной материальной точки
- Движение точки по гладкой неподвижной поверхности
- Движение точки по гладкой неподвижной кривой
- Натуральные уравнения движения по кривой
Динамика – это раздел теоретической механики, в котором изучается движение материальных тел под действием приложенных к ним сил. Покой – частный случай движения, поэтому раздел статики – это частный случай динамики.
В лекции кроме минимума теоретических знаний, какими должен овладеть студент по динамике, приводятся примеры решения различных задач, исходные данные к индивидуальному расчетно-графическому заданию и образец его выполнения.
Задачи расчетно-графического задания охватывают материалы следующих тем динамики:
— прямая задача динамики материальной точки (тема Д1);
— обратная задача динамики материальной точки (тема Д2);
— колебания и динамики относительного движения материальной точки (тема Д3);
— теоремы о движении центра масс и об изменении количества движения механической системы (тема Д4);
— теорема об изменении кинетической энергии механической системы (тема Д5);
— принцип Даламбера (тема Д6).
Вариант расчетно-графического задания определяется двумя цифрами, которые представляют собой две последние цифры номера зачетной книжки или задаются преподавателем. Первая цифра определяет номер рисунка, а вторая — номер варианта в таблице.
Законы динамики
Динамика — раздел теоретической механики, в котором изучается механическое движение материальных тел (точек) с учетом причин, которые вызывают или меняют это движение, то есть с учетом масс тел и сил, которые действуют на них.
В основе динамики лежат законы Ньютона, которые следуют из обобщения большого количества опытных фактов. Приведем основные законы динамики в современном преподавании.
Первый закон или закон инерции
Материальная точка, на которую не действует сила  (или действует система уравновешенных сил), сохраняет состояние покоя или равномерного прямолинейного
(или действует система уравновешенных сил), сохраняет состояние покоя или равномерного прямолинейного
движения относительно инерциальной системы отсчета:

где  и
и  — соответственно, скорость и ускорение материальной точки.
— соответственно, скорость и ускорение материальной точки.
Такое движение называется движением по инерции или движение без ускорения. Из закона следует, что для изменения скорости точки, то есть придание ей ускорения, необходимо подействовать на нее силой, отличной от нуля. Справедливо и обратно,
если материальная точка движется неравномерно или непрямолинейно, то она движется с ускорением, то есть на нее действует сила.
Инерциальной системой отсчета называется такая система, в которой выполняются первый и второй основные законы механики.
Неинерциальной системой отсчета называется такая система, которая движется с ускорением относительно инерциальной. В неинерциальной системе отсчета первый и второй законы динамики не выполняются.
Второй закон или основной закон динамики
Ускорение, которое приобретает материальная точка под действием силы, имеет направление силы, прямо пропорциональное силе и обратно пропорциональное массе точки.
Или эквивалентное определение: сила, действующая на материальную точку, равна произведению массы точки на ее ускорение и имеет направление ускорения
 или
или 
Масса «m» является положительная скалярная величина, которая характеризует степень сопротивления материальной точки изменению ее скорости, то есть является мерой инертности точки. В классической механике считается, что масса материальной точки есть величина постоянная.
За единицу массы в системе СИ принято килограмм:

Третий закон или закон равенства действия и противодействия
Силы, с которыми две материальные точки действуют друг на друга, равны по величине и направлены в противоположные стороны вдоль прямой, которая соединяет эти точки, то есть

где  сила, с которой первая материальная точка действует на вторую;
сила, с которой первая материальная точка действует на вторую;
 сила, с которой вторая материальная точка действует на первую.
сила, с которой вторая материальная точка действует на первую.
Если одну из этих сил назвать «действием», то вторая будет «противодействием». Если одну силу назвать «активной силой», то вторая будет «реакцией». Таким образом, при взаимодействии двух материальных точек силы всегда появляются парами и являются силами одной природы. Это означает, что ускорение, которые приобретают материальные точки под действием сил взаимодействия, обратно пропорциональные их массам.
Следует помнить, что эти силы приложены к разным материальным точкам и поэтому не уравновешивают друг друга.
Четвертый закон или закон независимости действия сил
Ускорение, которое приобретает материальная точка при одновременном действии на нее нескольких сил, равно векторной сумме ускорений, которые приобретает материальная точка под действием каждой из сил в отсутствии
других сил, то есть

Закон утверждает, что силы, которые одновременно действуют на
материальную точку, не влияют друг на друга и поэтому подлежат принципу суперпозиции (наложения) сил. Это значит, что одновременное действие на материальную точку системы сил  эквивалентное действию одной силы
эквивалентное действию одной силы 
которая называется равнодействующей и равной векторной сумме сил,которые
действуют:

Силы прибавляемых называются составляющими или компонентами равнодействующей. Сложение сил выполняется за правилом параллелограмма или его модификациями (правилами треугольника, или силового многоугольника).
Таким образом, если на материальную точку одновременно действуют несколько сил, то в уравнениях (1) и (2) под силой  следует понимать равнодействующую
следует понимать равнодействующую  всех приложенных к точке сил.
всех приложенных к точке сил.
Дифференциальное уравнение движения материальной точки (2) в векторной форме выглядит:

или в сокращенной форме записи

где
 радиус-вектор точки, определяющий положение точки на траектории (рис. 1).
радиус-вектор точки, определяющий положение точки на траектории (рис. 1).
Уравнение (6) представляет собой математическое выражение основного закона динамики (2) в векторной форме.
В зависимости от характера и постановки конкретной задачи это уравнение часто используют в скалярной форме, то есть в проекциях на оси любой системы координат.

Дифференциальные уравнения движения материальной точки в проекциях на оси  декартовой системы координат имеют вид:
декартовой системы координат имеют вид:

или

где,  проекции вектора ускорения
проекции вектора ускорения  на соответствующие координатные оси;
на соответствующие координатные оси;
 проекции силы
проекции силы  на те же оси;
на те же оси;
 текущие координаты точки.
текущие координаты точки.
Дифференциальные уравнения движения материальной точки в
проекциях на оси  природной системы координат
природной системы координат
имеют вид:

или

где  проекция вектора ускорения на направление касательной траектории;
проекция вектора ускорения на направление касательной траектории;
 угловая координата точки;
угловая координата точки;
 проекция вектора ускорения на направление главной нормали к траектории;
проекция вектора ускорения на направление главной нормали к траектории;
 модуль скорости;
модуль скорости;
 радиус кривизны траектории в данной точке;
радиус кривизны траектории в данной точке;
 проекции силы
проекции силы  соответственно на касательную
соответственно на касательную
 главную нормаль
главную нормаль  и бинормаль
и бинормаль  к траектории
к траектории
Как следует из (8), проекция на бинормаль равнодействующей сил, приложенных к материальной точке, равно нулю. Это означает, что траектория точки расположена так, что равнодействующая сила всегда лежит в плоскости  перпендикулярная к
перпендикулярная к 
С помощью дифференциальных уравнений движения материальной точки  можно решить две основные задачи динамики: прямую и обратную.
можно решить две основные задачи динамики: прямую и обратную.
Первой, или прямой задачей динамики называется задача, в которой по заданному закону движения и массе материальной точки определяется равнодействующая сил, которые приложены к точке.
Второй, либо обратной, либо основной задачей динамики называется задача, в которой по заданным силам, что действуют на материальную точку, массе точки и начальным
условиям определяется закон движения материальной точки.
Прямая (основная) задача динамики
Краткие сведения по теории:
Задача Д1 — на решение первой (прямой) задачи динамики материальной точки.
Если необходимо определить равнодействующую  прилагаемых к точке сил, то задача решается двукратным дифференцированием по времени указанных уравнений движения точки
прилагаемых к точке сил, то задача решается двукратным дифференцированием по времени указанных уравнений движения точки  и
и  в декартовых координатах,
в декартовых координатах,
или  в естественных координатах со следующим использованием формул (7) или (8) для определения проекций
в естественных координатах со следующим использованием формул (7) или (8) для определения проекций  и
и  или
или  и
и  равнодействующей
равнодействующей 
на соответствующие оси координат. Тогда величина равнодействующей вычисляется по
формулами:
 или
или 
Направление вектора  определяется:
определяется:
— или по значению косинусов направляющих углов между
 и единичными векторами
и единичными векторами  декартовых
декартовых
осей координат  и
и  то есть:
то есть:

— или по значению тангенса угла между вектором 
и единичным вектором  главной нормали природной системы координат, то есть:
главной нормали природной системы координат, то есть:

Порядок решения прямой задачи динамики материальной точки
Если в задаче необходимо определить любую из составляющих равнодействующей или другой величины, то рекомендуется следующий порядок решения:
1. Изобразить на рисунке материальную точку в произвольном положении.
2. Показать активные силы и реакции связей, что на нее действуют.
3. Выбрать систему отсчета.
4. Записать векторное уравнение движения точки в форме второго закона динамики.
5. Спроектировать векторное уравнение движения точки на выбранные оси координат.
6. Из полученных уравнений определить необходимые величины.
Примеры решения задач
Задача 1
Пуля весом  падает вертикально вниз под действием силы притяжения и подвергается сопротивлению среды (рис.1). Закон движения пули соответствует уравнению
падает вертикально вниз под действием силы притяжения и подвергается сопротивлению среды (рис.1). Закон движения пули соответствует уравнению  причем
причем  выражается в сантиметрах, t — в секундах.
выражается в сантиметрах, t — в секундах.

Определить силу сопротивления окружения R в виде функции
скорости, то есть 
Решение. Изобразим шар в произвольном положении на траектории и покажем силы, которые на него действуют
(рис.1.3):  сила притяжения;
сила притяжения;  сила сопротивления среды.
сила сопротивления среды.
Движение шара происходит вдоль вертикали, поэтому направим ось  вертикально вниз по направлению скорости. Тогда положение шара будет определяться координатой
вертикально вниз по направлению скорости. Тогда положение шара будет определяться координатой  .
.
Запишем уравнение движения пули в векторной форме:

и спроектируем его на ось 

откуда

Таким образом, чтобы определить силу сопротивления R, необходимо знать ускорение шара 
Поскольку закон изменения координаты  известен, то
известен, то

Находим первую и вторую производные от закона движения
пули:


Таким образом,

Из выражения для  ( с учетом того, что
( с учетом того, что  выходит
выходит

то есть

Ответ: 
Задача 2
Движение тела А массой  выражается уравнениями:
выражается уравнениями:

где  и
и  — в метрах; t — в секундах.
— в метрах; t — в секундах.
Определить силу  которая действует на тело, принимая его за материальную точку
которая действует на тело, принимая его за материальную точку
(Рисс.1).

Решение. Проекции на оси координат силы  которая приложена к телу, определяются по формулам:
которая приложена к телу, определяются по формулам:

где  и
и  — проекции ускорения тела на оси координат.
— проекции ускорения тела на оси координат.
В данном случае

Итак

Модуль  равен:
равен:

Сила  направлена вертикально вниз, поскольку
направлена вертикально вниз, поскольку  Таким образом, искомая сила, модуль которой равен
Таким образом, искомая сила, модуль которой равен  является силой притяжения.
является силой притяжения.
Ответ: 
Задача 3
Материальная точка массой  движется по окружности с радиусом
движется по окружности с радиусом  согласно закону
согласно закону 
Определить модуль R равнодействующей силы, которые приложенные к материальной точке.
Решение. В задаче движение материальной точки задано естественным способом, поэтому для определения равнодействующей сил воспользуемся зависимостями (8):

Определим касательное и нормальное ускорение материальной точки:

Поскольку  то проекция
то проекция  равнодействующей R на
равнодействующей R на
касательную ось равняется нулю.
Находим нормальную составляющую равнодействующей сил:

Модуль равнодействующей определим из выражения (Д1.1):

Таким образом, заданное движение материальной точки происходит под действием силы, постоянной по модулю и направленной вдоль радиуса к центру круга.
Ответ: 
Задача 4
Материальная точка массой  движется по кругу с радиусом
движется по кругу с радиусом  согласно закону
согласно закону 
Определить проекцию  равнодействующей сил, что приложенные к материальной точке, на касательную траектории в момент времени
равнодействующей сил, что приложенные к материальной точке, на касательную траектории в момент времени 
Решение. Для определения проекции  воспользуемся уравнением:
воспользуемся уравнением:

Сначала найдем значение скорости материальной точки:


Определяем величину касательного ускорения


Подставив в уравнение (1) значение  и
и  получим:
получим:

Ответ: 
Задача 5
Груз M весом  который подвешен к нитке длиной
который подвешен к нитке длиной  в неподвижной точке O, представляет собой конический маятник (рис.1), то есть движется по кругу у
в неподвижной точке O, представляет собой конический маятник (рис.1), то есть движется по кругу у
горизонтальной плоскости, при этом нить с вертикалью образует угол 
Определить величину скорости груза V и модуль силы натяжения нити T.
Решение. Изобразим груз M в произвольном положении и покажем силы, которые на него действуют: силу притяжения  которая направлена вертикально вниз, и натяжение нити
которая направлена вертикально вниз, и натяжение нити  которая направлена к точке подвеса O.
которая направлена к точке подвеса O.

Для решения задачи выбираем естественную систему координат: ось  направим по касательной к траектории (к кругу) в сторону движения груза, ось
направим по касательной к траектории (к кругу) в сторону движения груза, ось  по нормали до
по нормали до
центра кривизны и ось  вертикально вверх.
вертикально вверх.
Запишем уравнение движения груза в векторной форме:

Проектируем это векторное уравнение на оси координат:

Модуль силы натяжения нити T найдем из третьего из уравнений (1), учитывая, что 

Из второго из уравнений (1) найдем V, если учесть, что

то

Откуда

Ответ: 
Задания темы Д1
Д1.5. Задача Д1
Указания. Задание Д1 содержит две задачи Д1а и Д1б, которые надо решить. Обе задачи являются прямыми или первыми задачами динамики материальной точки. Отличие заключается в том, что при решении задачи Д1а надо воспользоваться дифференциальными уравнениями движения точки в проекциях на оси декартовой системы координат, а при решении задачи Д1б — в проекциях на природные оси координат.
Следует помнить, что направление вектора силы совпадает с направлением вектора соответствующего ускорения.
Д1.6. Задача Д1а
Материальная точка М массой m движется в пространстве
в соответствии с уравнениями:
 где
где 
 декартовые координаты точки в метрах,
декартовые координаты точки в метрах,  время в секундах.
время в секундах.
Зависимости  и
и  указаны непосредственно на рис. Д1.1 (траектория точки на рисунках показана условно), а зависимости
указаны непосредственно на рис. Д1.1 (траектория точки на рисунках показана условно), а зависимости  масса m точки и момент
масса m точки и момент
времени  приведены в таблице Д1а.
приведены в таблице Д1а.
Определить величину и направление равнодействующей системы сил, действующих на материальную точку в момент времени 
Примечание. Первая цифра шифра определяет номер рисунка, а вторая — номер варианта в таблице.


Пример решения задания Д1а
Дано:

Определить: равнодействующую 
Решение. Поскольку кинематические уравнения движения материальной точки заданы координатным способом, то воспользуемся дифференциальными уравнениями движения точки в проекциях на оси декартовой системы координат:

где, проекции вектора ускорения на координатные оси;
проекции вектора ускорения на координатные оси;
 проекции равнодействующей системы сил, действующих на точку, на координатные оси.
проекции равнодействующей системы сил, действующих на точку, на координатные оси.
Поскольку  то уравнение (1) можно переписать в виде:
то уравнение (1) можно переписать в виде:

Дважды дифференцируем по времени заданные кинематические уравнения движения:

и подставляем полученные выражения в (2). С учетом того, что  получим:
получим:

или

В заданный момент 

Тогда модуль равнодействующей силы:

Ориентация в пространстве вектора равнодействующей определяется направляющими углами  и
и  между вектором
между вектором  и соответствующими координатными осями
и соответствующими координатными осями  и
и 
Эти углы находятся по значениям их косинусов:

Ответ:

Задания Д1б
Материальное тело М массой m скользит (коэффициент трение скольжения  по желобу ОАВ, который расположен в вертикальной плоскости и изогнут, как показано на
по желобу ОАВ, который расположен в вертикальной плоскости и изогнут, как показано на
рис, Д1.2. Уравнение движения тела  приведены в таблице Д1б. Такой закон движения обусловлен тем, что на тело, кроме силы притяжения, реакции желоба и силы трения, действует некоторая сила
приведены в таблице Д1б. Такой закон движения обусловлен тем, что на тело, кроме силы притяжения, реакции желоба и силы трения, действует некоторая сила  которая направлена по касательной траектории.
которая направлена по касательной траектории.
В момент времени  тело находится в точке
тело находится в точке  расположенной на прямолинейном участке желоба. В момент времени
расположенной на прямолинейном участке желоба. В момент времени  тело находится в точке
тело находится в точке  расположенной на дуге полукруга радиуса
расположенной на дуге полукруга радиуса  и определенной углом
и определенной углом 
Найти. Считая тело материальной точкой определить в моменты времени  и
и  величину и направление силы
величину и направление силы  и величину силы трения
и величину силы трения 


Пример решения задания Д1б
Дано: траектория точки (рис. Д1.3), 


Определить: величину и направление силы  и величину силы трения
и величину силы трения  .
.
Решение.
1. Изобразим тело (материальную точку) в положении  (рис Д1.4).
(рис Д1.4).

Покажем силы, которые действуют на материальную точку:  сила притяжения;
сила притяжения;  — реакция поверхности желоба (перпендикулярна к поверхности);
— реакция поверхности желоба (перпендикулярна к поверхности);  — сила трения (против направления движения тела);
— сила трения (против направления движения тела);  некоторая сила (направим в сторону движения тела).
некоторая сила (направим в сторону движения тела).
Поскольку траектория точки известна, свяжем с ней естественную систему координат  (ось
(ось  направим по направлению движения, а ось
направим по направлению движения, а ось  перпендикулярно
перпендикулярно
Запишем уравнение движения материальной точки в векторной форме:

Проектируем это векторное уравнение на оси выбранной системы координат:



где  проекции вектора ускорения на касательную
проекции вектора ускорения на касательную  и главную нормаль
и главную нормаль  к траектории,
к траектории,

 величина силы трения.
величина силы трения.
В уравнениях (1) и (2):

где  радиус кривизны траектории в данной точке.
радиус кривизны траектории в данной точке.
Скорость точки равна:

Тогда:

В положении точки  радиус кривизны траектории равен бесконечности
радиус кривизны траектории равен бесконечности  поскольку эта область траектории является прямолинейной. Тогда:
поскольку эта область траектории является прямолинейной. Тогда:

Поскольку  то уравнение (2) можно переписать в виде:
то уравнение (2) можно переписать в виде:
 или
или 
Тогда


Уравнение (1) решим относительно силы 




Таким образом, в этом положении материальной точки сила  направлена по направлению ее движения (поскольку величина силы положительная).
направлена по направлению ее движения (поскольку величина силы положительная).
2. Изобразим материальную точку в положении  (рис Д1.5) на криволинейной области траектории (при изображении точки рекомендуется выдерживать заданный
(рис Д1.5) на криволинейной области траектории (при изображении точки рекомендуется выдерживать заданный
угол 
Покажем силы, которые на нее действуют:  сила притяжения,
сила притяжения,  реакции поверхности желоба (перпендикулярно к поверхности),
реакции поверхности желоба (перпендикулярно к поверхности),  — сила трения (против направления движения тела),
— сила трения (против направления движения тела),  некоторая сила (направим в сторону движения тела).
некоторая сила (направим в сторону движения тела).
Покажем выбранную систему координат в этом положении точки (ось  направим
направим
по касательной к траектории в сторону движения точки, а ось  перпендикулярно
перпендикулярно
 в сторону центра кривизны траектории).
в сторону центра кривизны траектории).

Запишем уравнение движения материальной точки в векторной форме:


Проектируем это векторное уравнение на оси выбранной системы координат:



В положении точки  величины тангенциального (3) и нормального (4) ускорения равны:
величины тангенциального (3) и нормального (4) ускорения равны:

Из уравнения (6) определим величину нормальной реакции  поверхности:
поверхности:

Тогда, сила трения равна:


Уравнение (5) решим относительно силы 



Таким образом, в этом положении материальной точки сила 
направлена против направления ее движения (поскольку величина силы отрицательная).
Ответ:


Обратная задача динамики и её решение
Краткие сведения по теории:
Задача Д2 — на решение второй (обратной или основной) задачи динамики материальной точки. Для её решение необходимо проинтегрировать или дифференциальное уравнение движения материальной точки в векторной форме, или равносильные ему системы скалярных уравнений, которые соответствуют выбранной системе отсчета, с учетом начальных условий.
Если, например, задача решается в проекциях на оси декартовой системы координат, то интегрируется система дифференциальных уравнений второго порядка:

При интегрировании каждого из этих уравнений появится
по две постоянные произвольные интегрирования, а всего их будет шесть, и
общее решение уровней движения точки будет иметь вид:

где  постоянные произвольные интегрирования.
постоянные произвольные интегрирования.
Чтобы получить частичное решение уравнений движения точки, которое будет соответствовать ее действительному движению, необходимо определить значение постоянных произвольных . Для этого необходимы дополнительные данные, которые определяют положение точки и ее скорость в некоторый фиксированный момент времени t. Если  (начальный момент времени), эти дополнительные данные называют начальными условиями задачи.
(начальный момент времени), эти дополнительные данные называют начальными условиями задачи.
Положение точки определяется тремя ее декартовыми координатами  скорость точки — тремя проекциями скорости на оси декартовых координат
скорость точки — тремя проекциями скорости на оси декартовых координат
системы дифференциальных уравнений (Д2.1) при  имеют вид:
имеют вид:

В результате подстановки первоначальных условий в первые и вторые интегралы системы (2.1) образуется система шести уравнений для определения шести неизвестных

При движении точки в плоскости, например  имеем два дифференциальных уравнения движения, соответственно будет четыре постоянные произвольные . При
имеем два дифференциальных уравнения движения, соответственно будет четыре постоянные произвольные . При  начальных условиях будут иметь вид:
начальных условиях будут иметь вид:

При прямолинейном движении точки, например вдоль оси  будем иметь одно дифференциальное уравнение движения и две постоянные произвольные . При
будем иметь одно дифференциальное уравнение движения и две постоянные произвольные . При  начальные условия будут выглядеть:
начальные условия будут выглядеть:

Если задача решается в проекциях на оси природной системы координат, то интегрировать необходимо дифференциальные уравнения движения для этой системы координат:

Начальными условиями в этом случае будут значение дуговой координаты S и проекция вектора скорости на направление касательной траектории  то есть при
то есть при 

Наконец, заметим, что заданная начальная скорость движения точки учитывает влияние на ее движение тех сил, которые действовали на точку до начального момента времени.
Порядок решения обратной задачи динамики материальной точки
Обратные задачи динамики материальной точки рекомендуется решать следующим образом:
1. Изобразить на рисунке материальную точку в произвольном положении и все силы, которые на нее действуют (как активные, так и реакции связей).
2. Выбрать систему отсчета, в которой задача решается наиболее простым способом. При этом начало координат расположить в месте, где находилась точка в начальный момент времени 
3. Сохранить исходные условия задачи.
4. Составить дифференциальное уравнение движения точки в проекциях на оси системы координат, которая выбрана.
5. Провести интегрирование полученной системы дифференциальных уравнений движения точки.
6. Определить по первоначальным условиям постоянные интегрирования.
7. Из полученной системы уравнений определить неизвестные величины.
Примеры решения задач
Задача 1
Тяжелое тело скользит по гладкой поверхности, которая наклонена под углом 
к горизонту.

Определить, за какое время Т тело пройдет путь  если в начальный
если в начальный
момент его скорость равнялась 
Решение. Представим тело в произвольном положении на наклонной плоскости (рис.1). Поскольку движение тела по плоскости является поступательным, а при поступательном движении ускорения всех точек тела одинаковые, то движение такого тела будем рассматривать как движение материальной точки (данное допущение
будет справедливым и для следующих задач этой темы).
Покажем силы, которые действуют на тело: силу притяжения  и нормальную реакцию наклонной плоскости
и нормальную реакцию наклонной плоскости 
Ось  направим в сторону движения тела.
направим в сторону движения тела.
В начальный момент времени  материальная точка находилась в начале системы координат (точка О), а ее скорость равнялась
материальная точка находилась в начале системы координат (точка О), а ее скорость равнялась  Таким образом, при
Таким образом, при
 начальные условия будут иметь вид:
начальные условия будут иметь вид:

Запишем уравнение движения тела в векторной форме:

Спроектируем записанное уравнение на ось 

Учитывая, что  получим
получим

Найдем зависимость скорости  от времени t. Для этого разделим переменные в последнем уравнении и проинтегрируем:
от времени t. Для этого разделим переменные в последнем уравнении и проинтегрируем:

Используя начальные условия, определим постоянное положение
интегрирования  Для этого подставим их в последнее уравнение. Поскольку при
Для этого подставим их в последнее уравнение. Поскольку при  то:
то:

Таким образом, уравнение для изменения скорости материальной точки будет иметь вид:

Находим зависимость координаты  от времени:
от времени:

Постоянное интегрирование  определим из начальных условий. Поскольку при
определим из начальных условий. Поскольку при  то:
то:

Окончательно, для координаты  будем иметь зависимость:
будем иметь зависимость:

Определим время Т, при котором 

или

Отсюда:

Поскольку время может быть только положительным, то:

Ответ: 
Задача 2
Тяжелое тело поднимается по негладкой наклонной плоскости, которая наклонена к горизонту под углом  В начальный момент скорость тела равнялась
В начальный момент скорость тела равнялась
 Коэффициент трения тела о плоскость
Коэффициент трения тела о плоскость 
Определить, какой путь S пройдет тело до остановки? За какое время Т тело пройдет этот путь?

Решение. Изобразим тело в виде материальной точки в произвольном положении (рис.1).
Покажем силы, которые действуют на материальную точку: силу притяжения  реакцию наклонной плоскости
реакцию наклонной плоскости  и силу трения
и силу трения 
Ось  направим вдоль наклонной поверхности в сторону движения, а начало отсчета (точку O) возьмем в начальном положении точки. Ось
направим вдоль наклонной поверхности в сторону движения, а начало отсчета (точку O) возьмем в начальном положении точки. Ось  направим перпендикулярно к оси
направим перпендикулярно к оси  Начальные условия движения точки при
Начальные условия движения точки при  будут выглядеть:
будут выглядеть:

Запишем уравнение движения точки в векторной форме:



Проектируем векторное уравнение (1) на оси координат:




Поскольку точка в направлении оси  не движется
не движется то из уравнения (3) следует, что нормальная составляющая реакции наклонной поверхности равна
то из уравнения (3) следует, что нормальная составляющая реакции наклонной поверхности равна 
Подставив в уравнение (2)  получим:
получим:


где 
Тогда

или

После интегрирования этого уравнения получим:

Соотношение (4) является первым интегралом дифференциального уравнения (2). Для определения постоянной интегрирования  подставим в уравнение (4) первоначальное условие, а именно при
подставим в уравнение (4) первоначальное условие, а именно при 
Тогда:


Для определения закона движения точки запишем полученное уравнение следующим образом:

Разделим переменные и проинтегрируем выражение:

Постоянная интегрирования  определится после подстановки начальных условий (при
определится после подстановки начальных условий (при  в последнее уравнение:
в последнее уравнение:

Таким образом, закон движения тела выглядит:

Итак, мы получили законы изменения скорости (5) и координаты  (6) тела в зависимости от времени.
(6) тела в зависимости от времени.
Определим время Т движения тела до полной остановки, скорость при этом будет равна нулю. Подставим  в уравнение (5):
в уравнение (5):

откуда:

Через время Т, согласно уравнению (6), точка будет находиться от начала координат на расстоянии S, которое в нашем случае численно равно пройденному точкой пути:

Подставив выражение для Т, получим:

С учетом числовых значений получим:

Ответ: 
Задача 3
Точка М, масса которой m, движется под действием силы притяжения по гладенькой внутренней поверхности желоба (рис.1). Поверхность желоба представляет собой часть боковой поверхности цилиндра радиусом r. В начальный момент времени точка
находится в положении  а ее скорость равна нулю.
а ее скорость равна нулю.
Определить скорость V точки М и реакцию T поверхности желоба в положении, когда центральный угол 

Решение. Изобразим точку М в произвольном положении на траектории, которой является внутренняя поверхность желоба. Положение точки определяется углом 
Покажем силы, которые действуют на точку М:  сила притяжения точки;
сила притяжения точки;  реакция внутренней поверхности желоба, которая направлена по радиусу к центру кривизны O.
реакция внутренней поверхности желоба, которая направлена по радиусу к центру кривизны O.
Поскольку траектория точки известна (дуга с радиусом r), то свяжем с точкой М естественную систему координат 
Уравнение движения точки М в векторной форме имеет вид:

Спроектируем векторное уравнение (1) на координатные
оси:

то есть

В уравнениях (2) и (3) три переменные величины:  При решении этих уравнений требуется одну из переменных выразить через другие. Поскольку в условии задачи не указано время движения точки, а задается угол изменения положения точки, то
При решении этих уравнений требуется одну из переменных выразить через другие. Поскольку в условии задачи не указано время движения точки, а задается угол изменения положения точки, то
выражаем в уравнении (2) переменную t через переменную 

Поскольку  то:
то:

Разделим переменные в последнем уравнении и проинтегрируем:

Поскольку при  (когда точка находится в положении
(когда точка находится в положении  и
и  то:
то:

Таким образом, закон изменения скорости материальной точки будет иметь вид:

В положении, когда  скорость точки М равняется:
скорость точки М равняется:

После определения скорости точки М из уравнения (3) находим нормальную реакцию внутренней поверхности цилиндра:

При  и
и  получим:
получим:

Ответ: 
Задача 4
Тяжелое кольцо М нанизано на горизонтальный гладкий проволочный круг (рис. 1). Кольцу придают начальную скорость  которая направлена по касательной к кругу. Во время движения кольца на него действует сила сопротивления
которая направлена по касательной к кругу. Во время движения кольца на него действует сила сопротивления  где m — масса кольца, V — его скорость, k — устойчивый коэффициент.
где m — масса кольца, V — его скорость, k — устойчивый коэффициент.

Определить: через какой промежуток времени  кольцо остановится, если
кольцо остановится, если

Решение. Поскольку траектория тяжелого кольца М известна — это круг радиуса r, то с кольцом повяжем естественную систему координат 
Покажем силы, действующие на тяжелое кольцо М:  сила притяжения кольца;
сила притяжения кольца;  сила сопротивления, направленная в сторону, противоположной скорости
сила сопротивления, направленная в сторону, противоположной скорости  реакция поверхности проволочного круга, которая лежит в плоскости
реакция поверхности проволочного круга, которая лежит в плоскости  перпендикулярной к кругу.
перпендикулярной к кругу.
Уравнение движения кольца М в векторной форме имеет вид:

Спроектируем это уравнение на ось 
 или
или 
Разделим в последнем уравнении переменные и проинтегрируем. При интегрировании учтем, что скорость кольца меняется от  в начального момента времени
в начального момента времени  до V некоторого момента времени t:
до V некоторого момента времени t:

Таким образом, закон изменения скорости тяжелого кольца будет иметь вид:

Определим время движения кольца. В момент времени 
когда кольцо останавливается, скорость  то есть:
то есть:

Подставив в последнее уравнение числовые данные, получим:

Ответ: 
Задания темы Д2
Груз М массой m, получив в точке А начальную скорость  движется в согнутой трубе АВС, расположенной в вертикальной плоскости, как показано на рис. Д2.1.
движется в согнутой трубе АВС, расположенной в вертикальной плоскости, как показано на рис. Д2.1.
На участке АВ на груз, кроме силы притяжения  действуют постоянная сила
действуют постоянная сила  (ее направление показано на рисунках, а величина приведена в табл. Д2) и сила сопротивления среды
(ее направление показано на рисунках, а величина приведена в табл. Д2) и сила сопротивления среды  которая зависит от скорости или квадрата скорости груза (табл. Д2). Трением груза по трубе на участке АВ пренебречь.
которая зависит от скорости или квадрата скорости груза (табл. Д2). Трением груза по трубе на участке АВ пренебречь.
В точке В груз, не меняя значения своей скорости, переходит на участок трубы ВС, где на него, кроме силы притяжения  действует сила трения (коэффициент трения
действует сила трения (коэффициент трения  и переменная сила
и переменная сила  проекция которой
проекция которой  на ось
на ось  задана в таблице Д2.
задана в таблице Д2.
Найти закон движения груза на участке ВС, то есть  где
где  считая груз материальной точкой и зная расстояние
считая груз материальной точкой и зная расстояние  или время
или время  движения груза на участке АВ. При расчетах принять ускорение свободного падения
движения груза на участке АВ. При расчетах принять ускорение свободного падения 
Указания. Задача Д2 является второй или обратной задачей динамики точки, которая решается путем составления и следующего двукратного интегрирования дифференциального уравнения второго порядка с учетом первоначальных условий. При этом следует помнить, что если в какой-то момент времени силы, которые действуют на материальную точку, меняются, то для описания следующего движения точки необходимо составить и интегрировать новое дифференциальное уравнение ее движения. Начальными условиями нового движения точки будут ее положение и скорость в конце предыдущего движения.
В случае, если задана длина  области, целесообразно перейти от переменной t к переменной
области, целесообразно перейти от переменной t к переменной  учитывая, что
учитывая, что



Пример решения задачи темы Д2
Дано:

Определить:  где
где  на участке BC.
на участке BC.
Решение. Поскольку силы, которые действуют на груз, в точке В меняются, то решение задачи разбивается на две части. Сначала рассматривается движение груза на участке АВ, а затем на участке ВС.
1. Рассмотрим движение груза на участке АВ (рис. Д 2.2), считая его материальной точкой
Изобразим груз в произвольном положении  на этом участке и покажем все силы, которые на него действуют:
на этом участке и покажем все силы, которые на него действуют:  сила притяжения;
сила притяжения;  заданная сила;
заданная сила;  сила сопротивления среды и
сила сопротивления среды и  реакция поверхности.
реакция поверхности.

Начало прямоугольной системы координат  расположим в точке А, а за положительное направление оси
расположим в точке А, а за положительное направление оси  принимаем направление движения груза.
принимаем направление движения груза.
Запишем основное уравнение динамики в векторном виде и в проекциях на ось 

Учитывая, что:

уравнение (2) приобретает вид:

Поделив на m и подставив числовые значения, получим:

Поскольку по условию задачи надо определить скорость тела в зависимости от пройденного расстояния  то в последнем уравнении перейдем от переменной t к переменной
то в последнем уравнении перейдем от переменной t к переменной 

Разделим переменные в уравнении (3), преобразуем к виду, удобному для интегрирования, и проинтегрируем:

По исходным условиям  определяем устойчивую интегрирования
определяем устойчивую интегрирования 

Тогда уравнение (4) приобретет вид:

откуда мы находим выражение для V:


Считая в уравнении 
 определим скорость
определим скорость  груза в точке В:
груза в точке В:

Эта скорость будет начальной скоростью движения груза на участке ВС.
2. Рассмотрим движение груза на участке ВС. Изобразим груз (рис. Д2.2) в произвольном положении  на этом участке и покажем все силы, которые на него действуют:
на этом участке и покажем все силы, которые на него действуют: 
сила притяжения;  реакция поверхности; — сила трения и заданная сила
реакция поверхности; — сила трения и заданная сила  которую направляем в направлении движения.
которую направляем в направлении движения.
Выберем систему координат для этого участка. Начало прямоугольной системы координат  расположим в точке В, а за положительное направление оси
расположим в точке В, а за положительное направление оси 
принимаем направление движения груза.
Запишем основное уравнение динамики в векторном виде и в проекциях на ось 




Учитывая, что




уравнение (6) приобретает вид:

Поделив на m и подставив числовые значения 
 и
и  получим:
получим:

Разделим переменные и проинтегрируем уравнение (7). Интегрирование выполняется с помощью определенных интегралов, верхняя граница которых переменная. При этом нижней границей будут первоначальные условия. При изменении времени от 
к t скорость точки меняется от  к V, а координата от
к V, а координата от  до
до 


Учитывая, что  получим:
получим:

Рассмотрим переменные и интегрируем:

Ответ: закон движения груза на участке BC:

где  в метрах,
в метрах,  в секундах.
в секундах.
Колебания и динамика относительного движения материальной точки
Краткие сведения по теории колебаний материальной точки:
Задача Д3 охватывает одновременно колебания и динамику относительного движения материальной точки.
Колебания материальной точки
Механическими периодическими колебаниями называют такие движения материальной точки, при которых она по очереди перемещается в двух противоположных направлениях относительно положения равновесия, и которые повторяются через определенные промежутки времени.
Основными характеристиками периодических колебаний являются период и частота.
Периодом колебаний (Т) называется наименьший промежуток времени, после которого повторяются значения величин, характеризующих колебательную систему и меняются при колебаниях.
За период колебаний система осуществляет одно полное колебание.
Единицей периода в системе СИ является секунда:

Частотой колебаний (v) называется величина, которая обратная периоду и равна числу полных колебаний в секунду,

Единицей частоты в системе СИ является Герц (Гц):

Круговой, или цикличной, или угловой частотой (k) называется величина, которая равна числу полных колебаний за  секунд, то есть:
секунд, то есть:
 или
или 
Единицей круговой частоты в системе СИ является радиан в секунду:

Наиболее важной разновидностью периодических колебаний являются гармонические колебания.
Гармоническими колебаниями называются такие периодические колебания, при которых величины, которые их характеризуют, меняются по времени по закону синуса или косинуса.
Необходимым условием возникновения колебаний является действие в произвольный момент времени на материальную точку, которая выведена из положение равновесия, восстановительной силы  направленной к положению равновесия и возвращающей точку в это положение. Более простым примером восстановительной силы является сила упругости деформированной пружины, которая пропорциональна деформации и направлена в сторону, противоположную деформации.
направленной к положению равновесия и возвращающей точку в это положение. Более простым примером восстановительной силы является сила упругости деформированной пружины, которая пропорциональна деформации и направлена в сторону, противоположную деформации.
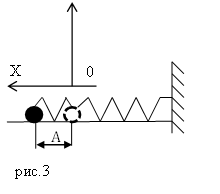
Кроме восстановительной силы на материальную точку, которая осуществляет колебания, действуют и другие силы. В зависимости от характера этих сил принято различать свободные, свободные затухающие и вынужденные колебания материальной точки.
Дальнейшее рассмотрение проведем на примере упругого маятника (пружины, к одному концу которой прикреплено тело массой m, а второй конец закреплен, причем массой пружины по сравнению с массой тела пренебрегают), который находится на гладкой горизонтальной поверхности.
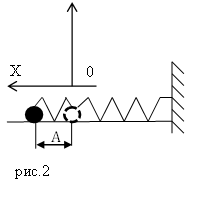
Таким образом, исследование колебаний сводится к решению оборотной задачи динамики материальной точки (тела) М, которая движется вдоль горизонтальной оси, например  под действием или только восстановительной силы (рис. Д3.1), или под действием восстановительной силы и других сил (рис. Д3.2 и Д3.3).
под действием или только восстановительной силы (рис. Д3.1), или под действием восстановительной силы и других сил (рис. Д3.2 и Д3.3).

Начало отсчета точку О расположим в месте, где находится точка (тело) М при недеформированной пружине. Восстановительная сила во всех случаях будет силой упругости деформированной пружины, которая равна:

где  жесткость или коэффициент упругости пружины,
жесткость или коэффициент упругости пружины,
 смещения или отклонения точки (тела) от положения равновесия при деформации пружины,
смещения или отклонения точки (тела) от положения равновесия при деформации пружины,
и  орт оси
орт оси 
Свободными колебаниями материальной точки называются такие ее колебания, которые происходят под действием только восстановительной силы (рис. Д3.1).
В этом случае дифференциальное уравнение движения точки имеет вид:

где  круговая частота колебаний.
круговая частота колебаний.
Период колебаний равен

Решение однородного линейного дифференциального уравнения второго порядка с устойчивыми коэффициентами (Д3.3) или, что тоже самое, закон движения точки выглядит:

где  и
и  постоянные интегрирования, которые определяются по первоначальным условиям.
постоянные интегрирования, которые определяются по первоначальным условиям.
Если исходные условия при  имеют вид:
имеют вид:  то
то  и
и  и
и 
В амплитудной форме записи решение имеет вид:

где  амплитуда колебаний (наибольшее по величине отклонение точки от положения равновесия);
амплитуда колебаний (наибольшее по величине отклонение точки от положения равновесия);
 фаза колебаний (определяет мгновенное значение координаты
фаза колебаний (определяет мгновенное значение координаты  точки в произвольный момент времени t);
точки в произвольный момент времени t);
 начальная фаза колебаний (определяет значение координаты точки в начальный момент времени
начальная фаза колебаний (определяет значение координаты точки в начальный момент времени  ).
).
Амплитуда и начальная фаза колебаний определяются по первоначальным условиям.
Если исходные условия имеют при  вид:
вид:
 то:
то:  и
и 
Таким образом, в этом случае материальная точка будет осуществлять незатухающие гармонические колебания, график которых при  приведен на рис. Д3.4. Период Т и частота v колебаний не зависят от первоначальных условий движения точки и оказываются неизменными характеристиками колебательной системы.
приведен на рис. Д3.4. Период Т и частота v колебаний не зависят от первоначальных условий движения точки и оказываются неизменными характеристиками колебательной системы.

Если на материальную точку кроме восстановительной силы будет действовать постоянная по величине и направлению сила то характер колебаний не изменится, то есть точка будет по-прежнему осуществлять незатухающие гармонические колебания, но уже относительно нового положения равновесия,
то характер колебаний не изменится, то есть точка будет по-прежнему осуществлять незатухающие гармонические колебания, но уже относительно нового положения равновесия, которое будет смещено относительно предыдущего положения равновесия О на величину статического отклонения точки
которое будет смещено относительно предыдущего положения равновесия О на величину статического отклонения точки  в сторона действия силы
в сторона действия силы  При этом величины
При этом величины  и Т определяются по формулам:
и Т определяются по формулам:

Свободными затухающими колебаниями материальной точки называются такие ее колебания, которые происходят под действием восстановительной силы  и силы
и силы
сопротивления среды  (рис. Д3.2).
(рис. Д3.2).
Пусть сила сопротивления  пропорциональна скорости V точки, то есть
пропорциональна скорости V точки, то есть  где
где  коэффициент сопротивления. В этом в случае дифференциального уравнения движения точки имеет вид:
коэффициент сопротивления. В этом в случае дифференциального уравнения движения точки имеет вид:

где  коэффициент затухания,
коэффициент затухания,
 круговая частота свободных гармонических колебаний.
круговая частота свободных гармонических колебаний.
Решение этого однородного линейного дифференциального уравнения второго порядка с устойчивыми коэффициентами зависит от соотношения между b и k.
При малом сопротивлении  решение имеет вид:
решение имеет вид:

или в амплитудной форме

В этих уравнениях  и
и  постоянные интегрирования, которые определяются по начальным условиям,
постоянные интегрирования, которые определяются по начальным условиям,  — условная частота затухающих колебаний.
— условная частота затухающих колебаний.
Тогда условный период  затухающих колебаний
затухающих колебаний

Как видно из (Д3.12), движение точки носит колебательный характер, потому что координата  периодически меняет свой знак. Множитель
периодически меняет свой знак. Множитель  указывает на то, что амплитуда колебаний со временем уменьшается. Поэтому такие колебания называют затухающими
указывает на то, что амплитуда колебаний со временем уменьшается. Поэтому такие колебания называют затухающими 
В случаях большого сопротивления  и критического
и критического
сопротивления  в решение дифференциального уравнения движения
в решение дифференциального уравнения движения
точки не входят знакопеременные периодические функции и поэтому движение
точки не будет колебательным. Такое движение называется апериодическим (непериодическим).
Если  то в этом случае решение уравнения (Д3.10) имеет вид:
то в этом случае решение уравнения (Д3.10) имеет вид:

где

Если b = k, то решение уравнения (Д3.10) имеет вид:

Вынужденными колебаниями материальной точки без учета силы сопротивления среды называются такие колебания, которые происходят под действием восстановительной силы  и вынужденной силы
и вынужденной силы  (рис. Д3.3), которая периодически меняется.
(рис. Д3.3), которая периодически меняется.
Пусть проекция вынуждающей силы на ось, совпадающая с направлением движения точки, меняется по закону:

где H — максимальное значение вынужденной силы;
p — частота изменения вынужденной силы;
 фаза изменения вынужденной силы;
фаза изменения вынужденной силы;
 начальная фаза изменения вынужденной силы
начальная фаза изменения вынужденной силы
Дифференциальное уравнение движения точки М в проекции на ось  имеет вид:
имеет вид:

или

Если выбрано

то получим дифференциальное уравнение вынужденных колебаний материальной точки:

Решение уравнения (3.18) в амплитудной форме, то есть, зависимость координаты  от времени t, имеет вид:
от времени t, имеет вид:

где A — амплитуда вынужденных колебаний имеет вид:

Из уравнения (3.19) следует, что движение точки представляет собой наложение двух колебательных движений.
Колебания, которые определяются первым слагаемым:

имеют частоту k свободных гармонических колебаний и называются собственными колебаниями материальной точки.
Колебания, определяемые вторым слагаемым

имеют частоту  вынуждающей силы
вынуждающей силы  и называются вынужденными колебаниями материальной точки.
и называются вынужденными колебаниями материальной точки.
Таким образом, при одновременном действии восстанавливающей и вынуждающей сил точка осуществляет сложное колебательное движение, которое представляет собой результат наложения свободных и вынужденных колебаний точки.
Необходимо подчеркнуть, что частота  и период
и период  вынужденных колебаний являются также частотой и периодом вынужденной силы.
вынужденных колебаний являются также частотой и периодом вынужденной силы.
Вынужденные колебания, частота которых меньше частоты свободных колебаний точки, называют вынужденными колебаниями малой частоты.
Вынужденные колебания, частота которых больше частоты свободных колебаний, называют вынужденными колебаниями большой частоты.
Фаза вынужденных колебаний
Если  (случай вынужденных колебаний малой частоты), то
(случай вынужденных колебаний малой частоты), то  и фаза вынужденных колебаний совпадает с частотой вынужденной силы. В этом случае:
и фаза вынужденных колебаний совпадает с частотой вынужденной силы. В этом случае:

Если вынужденные колебания происходят с большой
частотой  то
то  и для того, чтобы амплитуда колебаний была положительной, ее записывают в виде:
и для того, чтобы амплитуда колебаний была положительной, ее записывают в виде:

При этом, фаза вынужденных колебаний большой частоты равна  и отличается от фазы вынужденной силы
и отличается от фазы вынужденной силы  на величину
на величину  то есть фазы вынужденной силы и вынужденных колебаний противоположны.
то есть фазы вынужденной силы и вынужденных колебаний противоположны.
В случае вынужденных колебаний малой частоты точка М всегда отклонена от начала координат О в ту сторону, в которую направлена в данный момент вынужденная сила  При этом в обоих случаях максимальное отклонение точки от начала координат происходит в тот момент времени, когда модуль вынужденной силы достигает максимума.
При этом в обоих случаях максимальное отклонение точки от начала координат происходит в тот момент времени, когда модуль вынужденной силы достигает максимума.
Амплитуда вынужденных колебаний
Статичным отклонением точки называется величина  (рис.Д3.6), которая определяется из условия:
(рис.Д3.6), которая определяется из условия:

Отсюда

где H — максимальное значение вынужденной силы.
Отношение амплитуды вынужденных колебаний А до статического отклонения  называется коэффициентом динамичности
называется коэффициентом динамичности 
При 

При 

График изменения коэффициента динамичности в зависимости от смены частоты вынуждающей силы (рис.Д3.7) имеет разрыв при значении  В этом случае коэффициент динамичности
В этом случае коэффициент динамичности  увеличивается до бесконечности и наступает так называемое явление резонанса.
увеличивается до бесконечности и наступает так называемое явление резонанса.
Явление резонанса
Явление резонанса возникает когда частоты вынужденных и свободных
колебаний точки совпадают, то есть:


При этом амплитуда А вынужденных колебаний точки равна бесконечности и большинство уравнений вынужденных колебаний, полученных при условии  теряют смысл.
теряют смысл.
Дифференциальное уравнение движения при  имеет вид:
имеет вид:

Уравнение (Д3.25) отличается от уравнения (Д3.18) тем, что в правой части стоит частота k, равная частоте собственных колебаний точки.
Решение дифференциального уравнения (Д3.25) имеет вид:

При резонансе частота и период вынужденных колебаний равны, соответственно, частоте k и периоду Т свободных колебаний точки, а фаза вынужденных колебаний  отстает от фазы вынуждающей силы
отстает от фазы вынуждающей силы  на величину
на величину 

График отклонений для вынужденных колебаний во время резонанса — это периодическая кривая, напоминающая синусоиду (рис.Д3.8), которая вписывается в область, ограниченную прямыми и
и  поскольку
поскольку  не больше за единицу. При
не больше за единицу. При  точки графика лежат на этих прямых.
точки графика лежат на этих прямых.
Из графика видно, что амплитуды колебаний увеличиваются со временем.
Порядок решения задач на колебательное движение материальной точки
При решении задач на колебания материальной точки рекомендуется придерживаться следующего порядка:
1. Изобразить материальную точку в произвольном положении и показать силы, которые на нее действуют.
2. Выбрать систему отсчета, начало системы координат разместить в положении статического равновесия и направить ось в сторону движения точки.
3. Записать начальные условия движения точки.
4. Составить дифференциальное уравнение движения материальной точки в проекциях на соответствующую ось.
5. Проинтегрировать дифференциальное уравнение движения.
6. Использовать начальные условия определения постоянной интегрирования.
7. Записать окончательное уравнение движения.
Для определения круговой частоты k и  и периода колебаний T и
и периода колебаний T и  не нужно интегрировать дифференциальные уравнение движения. Достаточно только составить дифференциальное уравнение движения, определить коэффициент
не нужно интегрировать дифференциальные уравнение движения. Достаточно только составить дифференциальное уравнение движения, определить коэффициент  при координате
при координате  коэффициент 2b при проекции скорости
коэффициент 2b при проекции скорости  точки и вычислить круговую частоту и период колебаний по приведенным выше формулами.
точки и вычислить круговую частоту и период колебаний по приведенным выше формулами.
Рассматривая задачу на свободные колебания материальной точки при отсутствии сил сопротивления, можно доказать решение к результату в общем виде, а уже потом подставить в него многочисленные данные.
Рассматривая же задачу на свободные колебания материальной точки при наличии сил сопротивления, пропорциональных скорости, многочисленные данные надо подставить в составленное дифференциальное уравнение движения и определить величины коэффициентов b и k, поскольку решение дифференциального уравнения движения при таких колебаниях зависит от соотношения этих коэффициентов (случаи малого сопротивления  большого сопротивления
большого сопротивления  и критического сопротивления
и критического сопротивления 
Решая задачу на вынужденные колебания надо определять числовые значения коэффициентов дифференциального уравнения, поскольку вид частичного решения этого уравнения зависит от соотношения коэффициентов р и k.
При решении задач, в которых необходимо определить условия, обеспечивающие попадание материальной точки в резонанс, не нужно интегрировать дифференциальные уравнения движения. Для определения этих условий достаточно, воспользовавшись
составленным дифференциальным уравнением движения, определить
круговые частоты свободных — k и вынужденных р колебаний и
сравнять их между собой.
Примеры решения задач
Задача 1
Определить максимальное удлинение  пружины АВ (рис. 1, а) в сантиметрах при свободных вертикальных колебаниях груза, если он прикреплен в точке В
пружины АВ (рис. 1, а) в сантиметрах при свободных вертикальных колебаниях груза, если он прикреплен в точке В
до недеформированной пружины и отпущен из состояния покоя. Статическая деформация пружины под действием груза равна 

Решение. Изобразим груз в произвольном положении (рис.1, б) и покажем силы, которые на него действуют: силу упругости пружины  которая является восстановительной силой, и силу притяжения груза
которая является восстановительной силой, и силу притяжения груза 
Поскольку на груз помимо восстановительной силы  действует и постоянная сила — сила притяжения груза
действует и постоянная сила — сила притяжения груза  то центр колебаний сместим относительно конца недеформированной пружины в направлении силы притяжения на
то центр колебаний сместим относительно конца недеформированной пружины в направлении силы притяжения на  (точка О). Ось
(точка О). Ось  направим в направлении движения груза.
направим в направлении движения груза.
Когда груз будет находиться в крайнем нижнем положении (рис.1, б), то максимальное удлинение пружины будет состоять из статической деформации  и амплитуды
и амплитуды  свободных колебаний:
свободных колебаний:

Величину амплитуды можно определить из выражения:

где  начальное положение груза;
начальное положение груза;
 начальная скорость груза.
начальная скорость груза.
По условию задачи при 
Подставляя значение  и
и  в уравнение (1), получим:
в уравнение (1), получим:

Таким образом, максимальное удлинение пружины равняется:

Ответ: 
Задача 2
Определить эквивалентный коэффициент жесткости  из двух пружин и период колебаний груза P весом 18 Н, подвешенного к этим пружинам, если пружины соединены
из двух пружин и период колебаний груза P весом 18 Н, подвешенного к этим пружинам, если пружины соединены
последовательно (рис. 1, а) и параллельно (рис. 2). Коэффициенты жесткости пружин: 
Решение: В случае последовательного соединения пружин общее статическое удлинение  будет равняться сумме статических продлений первой и второй пружины:
будет равняться сумме статических продлений первой и второй пружины:

Поскольку каждая из пружин в статическом положении растягивается силой P, то согласно (Д3.9):

С учетом последних соотношений формула (1) имеет вид:

Для эквивалентной расчетной схемы с одной пружиной (рис. 1, б):


где  — коэффициент жесткости эквивалентной пружины, которая заменяет две последовательно соединенные пружины.
— коэффициент жесткости эквивалентной пружины, которая заменяет две последовательно соединенные пружины.
Поскольку статическое удлинение указанной (рис. 1, а) и эквивалентной (рис. 1, б) схем должно быть равным, то:

С учетом числовых данных:

Период колебаний по формуле (Д3.9):

В случае параллельного соединения пружин (рис. 2) их статическое удлинение будет одинаковым:

Исходя из формулы (Д3.9) пружины будут растянуты усилиями:

Таким образом, сила притяжения груза P будет уравновешиваться двумя вертикальными усилиями  и
и  пружинами, то есть
пружинами, то есть  или:
или:

С другой стороны, для эквивалентной расчетной схемы с одной пружиной (рис. 1, б):

где — коэффициент жесткости эквивалентной пружины, которая заменяет две параллельные пружины.
— коэффициент жесткости эквивалентной пружины, которая заменяет две параллельные пружины.
Откуда

С учетом числовых данных:


Период колебаний по формуле (Д3.9):


Ответ:



Задача 3
Дифференциальное уравнение движения материальной точки имеет вид: 
Определить максимальное значение массы точки при котором движение будет апериодическим.
Решение. Движение точки будет апериодическим, если выполняется условие

где
 коэффициент сопротивления;
коэффициент сопротивления;
 частота свободных незатухающих колебаний.
частота свободных незатухающих колебаний.
Дифференциальное уравнение  приведем к каноническому виду, разделив на массу:
приведем к каноническому виду, разделив на массу:

Отсюда:

С учетом полученных значений b и k, условие (1) имеет вид:

Решаем неравенство (2) относительно массы m:

Ответ: максимальное значение массы 
Задача 4
Тело весом  подвешенное на пружине, которую сила
подвешенное на пружине, которую сила  растягивает на
растягивает на  при движении встречает сопротивление, величина которого пропорциональна первой степени скорости. Сила сопротивления при скорости
при движении встречает сопротивление, величина которого пропорциональна первой степени скорости. Сила сопротивления при скорости  равна
равна В начальный момент пружина была растянута относительно положения равновесия на
В начальный момент пружина была растянута относительно положения равновесия на  и тело начало двигаться без начальной скорости, то есть,
и тело начало двигаться без начальной скорости, то есть, 
Определить уравнение движения тела 
Решение. Перед тем, как записать общее уравнение движения точки, необходимо выяснить, при каком сопротивлении происходит движение, то есть сравнить значение коэффициента b и круговой частоты k:

Из условия задачи следует:

Таким образом,  то есть коэффициент сопротивления равен круговой частоте, и движение точки будет апериодическим.
то есть коэффициент сопротивления равен круговой частоте, и движение точки будет апериодическим.
В этом случае закон движения точки определяется зависимостью (Д3.16):

Начальные условия:  Подставляя их в уравнение (1), получим:
Подставляя их в уравнение (1), получим:

Ответ: 
Найдя по формуле (2) значение  в зависимости от времени t (табл. 1), построим график
в зависимости от времени t (табл. 1), построим график  (Рис.1).
(Рис.1).

Из графика видно, что при  точка не колеблется и быстро приближается к положению равновесия
точка не колеблется и быстро приближается к положению равновесия  Выясним теперь, переходит ли груз в положение статического равновесия. Для этого приравняем
Выясним теперь, переходит ли груз в положение статического равновесия. Для этого приравняем  в уравнении (2) к нулю:
в уравнении (2) к нулю:

Моменты времени, в которые груз находится в положении статического равновесия, определяются из уравнений:
 и
и 
Из первого уравнения следует: 
Из второго уравнения: 
Значение  соответствует угасанию движения, отрицательное значение
соответствует угасанию движения, отрицательное значение показывает отсутствие перехода тела через положение статического равновесия.
показывает отсутствие перехода тела через положение статического равновесия.
Задача 5
На тело, которое подвешено к пружине, действует вертикальная вынужденная сила 
Определить динамический коэффициент, если круговая частота свободных колебаний тела 
Решение. Сравнивая заданное в условиях значение для вынужденной силы с выражением (Д3.17):

получим, что частота ее изменения 
Поскольку  то в данной задаче имеем вынужденные колебания малой частоты.
то в данной задаче имеем вынужденные колебания малой частоты.
Коэффициент динамичности  в этом случае соответственно с (Д3.23) равняется:
в этом случае соответственно с (Д3.23) равняется:

Ответ: 
Задача 6
Дифференциальное уравнение колебательного движения материальной точки имеет вид:

Определить коэффициент динамичности 
Решение. Сравнивая заданное в условиях задачи уравнение колебательного движения с (Д3.18):

получим:

Поскольку  то имеем вынужденные колебания малой. частоты и коэффициент динамичности
то имеем вынужденные колебания малой. частоты и коэффициент динамичности  равняется:
равняется:

Ответ: 
Задача 7
Материальная точка М массой  осуществляет прямолинейные колебания вдоль оси
осуществляет прямолинейные колебания вдоль оси  (рис.1) под действием вынужденной силы
(рис.1) под действием вынужденной силы  и восстановительной силы
и восстановительной силы  модуль которой пропорциональный расстоянию точки от начала координат (коэффициент пропорциональности равен
модуль которой пропорциональный расстоянию точки от начала координат (коэффициент пропорциональности равен 
Определить закон движения точки, если в начальный момент  и
и 

Решение: Дифференциальное уравнение движения материальной точки М в данном случае имеет вид:

или

Уравнение (1) является дифференциальным уравнением вынужденных колебаний (Д3.18), в котором:  (то есть
(то есть  );
); 
 и
и 
Поскольку  то общее решение уравнения (1) находим из формулы (Д3.19):
то общее решение уравнения (1) находим из формулы (Д3.19):

В нашем случае это уравнение будет выглядеть:

или

Учитывая, что  то
то

Окончательно,

Перейдем к нахождению постоянных  и
и  Для этого дифференцируем уравнение (2) по времени t:
Для этого дифференцируем уравнение (2) по времени t:

Подставим в уравнение (2) и (3) начальные условия.
При 
Тогда

или

Сжатые сведения по теории динамики относительного движения материальной точки
Относительным движением материальной точки называется ее движение относительно неинерциальной (подвижной) системы отсчета, которая движется относительно инерциальной (условно недвижимой) системы.
Основное уравнение динамики относительного движения материальной точки имеет вид:


где — относительное ускорение точки,
— относительное ускорение точки,
 силы, действующие на точку (как активные, так и реакции связей);
силы, действующие на точку (как активные, так и реакции связей);
 переносная сила инерции,
переносная сила инерции,  и ;
и ;
 кориолисовая сила инерции,
кориолисовая сила инерции, 
Отметим, что силы инерции направлены в сторону, противоположную соответствующим ускорениям.
Таким образом, изменение относительного движения точки может происходить по двум причинам: во-первых, вследствие взаимодействия точки с другими материальными точками (активные силы и реакции связей), во-вторых, в следствии ускоренного движения подвижной системы отсчета относительно недвижимой системы отсчета (силы инерции).
Кориолисовая сила инерции

направлена перпендикулярно плоскости, в которой лежат векторы  и
и  по правилу правого винта и по величине равно:
по правилу правого винта и по величине равно:

где  — относительная скорость точки,
— относительная скорость точки,
 — угловая скорость вращения подвижной системы координат относительно неподвижной.
— угловая скорость вращения подвижной системы координат относительно неподвижной.
Кориолисовая сила инерции равна нулю, если точка неподвижная относительно подвижной системы отсчета ( 
 или если подвижная система отсчета движется поступательно относительно неподвижной
или если подвижная система отсчета движется поступательно относительно неподвижной  или векторы и
или векторы и  направлены либо в одну сторону, либо в противоположные стороны
направлены либо в одну сторону, либо в противоположные стороны

Переносная сила инерции
Конкретный вид переносной силы инерции  будет зависеть от того, какой тип движения осуществляет подвижная система отсчета относительно неподвижной.
будет зависеть от того, какой тип движения осуществляет подвижная система отсчета относительно неподвижной.
1. Подвижные оси координат осуществляют неравномерное вращение вокруг неподвижной оси.
В этом случае

где  центробежная сила инерции,
центробежная сила инерции,
 вращательная сила инерции (рис. Д3.10)
вращательная сила инерции (рис. Д3.10)

Величины центробежной и вращательной сил инерции определяются по формулам:

где  и
и  угловая скорость и угловое ускорение подвижной системы отсчета;
угловая скорость и угловое ускорение подвижной системы отсчета;
 расстояние от материальной точки до оси вращения.
расстояние от материальной точки до оси вращения.
Тогда основное уравнение динамики относительного движения точки имеет вид:

2. Подвижные оси координат осуществляют равномерное вращение вокруг неподвижной оси.
В этом случае,  то есть,
то есть, и
и 
Основное уравнение динамики относительного движения точки в данном случае имеет вид:

3. Подвижные оси координат движутся поступательно.
В этом случае  то есть,
то есть,  при любом поступательном движении.
при любом поступательном движении.
Если поступательное движение прямолинейное, то

где  ускорение начала подвижной системы координат относительно неподвижной системы.
ускорение начала подвижной системы координат относительно неподвижной системы.
По величине

Основное уравнение динамики относительного движения точки тогда будет иметь вид:

Если поступательное движение криволинейное, то

где  нормальная сила инерции,
нормальная сила инерции,
 касательная сила инерции (рис. Д3.10).
касательная сила инерции (рис. Д3.10).
Величины нормальной и касательной сил инерции определяются по формулам:

где  алгебраическая величина скорости начала подвижной системы координат относительно недвижимой системы;
алгебраическая величина скорости начала подвижной системы координат относительно недвижимой системы;
 радиус кривизны траектории.
радиус кривизны траектории.
Основное уравнение динамики относительного движения точкиттогда будет иметь вид:

4. Точка находится в состоянии покоя относительно подвижной системы координат.
Поскольку
 то
то  и
и  и уравнение относительного спокойствия материальной точки будет иметь вид:
и уравнение относительного спокойствия материальной точки будет иметь вид:

Порядок решения задач динамики относительного движения материальной точки
1. Изобразить материальную точку в произвольном положении.
2. Разложить абсолютное движение материальной точки на относительный и переносной, выбрать неподвижную систему координат, связанную с телом, которое осуществляет переносное движение.
3. Записать начальные условия относительного движения материальной точки.
4. Изобразить на рисунке активные силы, которые приложены к точке.
5. Определить переносное и кориолисовое ускорение переносную и кориолисовую силы инерции, добавить их к активным силам, которые действуют на материальную точку.
6. Сохранить уравнение относительного движения в векторной форме.
7. Спроектировать векторное уравнение на оси выбранной подвижной системы координат.
8. Проинтегрировать полученные дифференциальные уравнения, определить постоянные интегрирования с помощью начальных условий.
9. Определить величины, которые ищутся.
Примеры решения задач
Задача 1
Шар М массой  движется со скоростью
движется со скоростью  относительно вертикальной трубки, которая на расстоянии
относительно вертикальной трубки, которая на расстоянии  прикреплена к вертикальному валу 1 (Рисс.1). Вал вращается с постоянной угловой скоростью
прикреплена к вертикальному валу 1 (Рисс.1). Вал вращается с постоянной угловой скоростью 


Определить переносную силу инерции шара.
Решение. Сначала определим, что относительным движением точки М будет ее движение относительно трубы, а переносным движением будет вращение вертикального вала 1, то есть, можно обозначить его угловую скорость  вместо
вместо  В общем случае переносная сила инерции равняется:
В общем случае переносная сила инерции равняется:

где m — масса материальной точки,
 переносное ускорение.
переносное ускорение.
Поскольку подвижная система координат которая связана с телом, осуществляет вращательное движение, то переносное ускорение состоит из нормального и тангенциального ускорений:

В этом случае

где

а  расстояние от точки до оси вращения
расстояние от точки до оси вращения
Поскольку вал 1 вращается с постоянной угловой скоростью, то  равняется нулю и
равняется нулю и 
Таким образом, в данной задаче переносное ускорение точки состоит только из нормального ускорения:

Нормальное ускорение точки М направлено слева, в центр вращения точки (рис.1), а переносная сила инерции  в сторону, противоположную
в сторону, противоположную 
По модулю переносная сила инерции равна:

Ответ: 
Задача 2
Трубка вращается вокруг оси О (рис.1) по закону  В трубке движется шар М массой
В трубке движется шар М массой  по закону
по закону 

Определить модуль кориолисовой силы инерции шара в момент времени 
Решение. Кориолисова сила инерции по определению равна:

где  кориолисовое ускорение точки.
кориолисовое ускорение точки.
Направлена  в сторону, противоположную кориолисовому ускорению.
в сторону, противоположную кориолисовому ускорению.
В общем случае  по величине равен:
по величине равен:

Вычислим модуль кориолисового ускорения в соответствии с условиями данной задачи
Вращение трубки вокруг оси О является переносным движением для шара М. Закон вращательного движения задан:

следовательно, закон изменения угловой скорости имеет вид:

а при 
Поскольку значение угловой скорости положительное, то вращение трубки совпадает с направлением угла отсчета  (Рисс.1).
(Рисс.1).
Перемещение шара вдоль трубки является относительным движением, уравнение которого задано в виде:

Тогда, скорость относительного движения шара определится с выражения:

а при 
Поскольку вектор угловой скорости  является перпендикулярный плоскости, в которой вращается трубка, то угол между векторами
является перпендикулярный плоскости, в которой вращается трубка, то угол между векторами  и равняется
и равняется  Таким образом, модуль кориолисового ускорения согласно (2) равняется:
Таким образом, модуль кориолисового ускорения согласно (2) равняется:

а величина кориолисовой силы инерции:

Определим направление  Согласно (1)
Согласно (1)  направлена в сторону, противоположный кориолисовой ускорению
направлена в сторону, противоположный кориолисовой ускорению 
Если (по правилу Жуковского) повернуть вектор относительной скорости вокруг точки М на  в сторону переносного вращения (то есть, против движения часовой стрелки), возвращенный вектор укажет нам направление
в сторону переносного вращения (то есть, против движения часовой стрелки), возвращенный вектор укажет нам направление  (рис. 1) и, таким образом, направление кориолисовой силы инерции
(рис. 1) и, таким образом, направление кориолисовой силы инерции 
Ответ: 
Задача 3
Тело весом 2 Н положено на гладкую грань трехгранной призмы, вторая грань которой лежит на горизонтальной плоскости.
Определить, какое горизонтальное ускорение должна иметь призма, чтобы тело не двигалось относительно призмы, и какое давление вызывает тело на призму в этом случае, если 

Решение. Если тело находится в состоянии относительного спокойствия по отношению к призме, которая движется, то геометрическая сумма приложенных к телу сил и переносной силы инерции равны нулю.
К телу приложены сила притяжения  и реакция гладкой поверхности
и реакция гладкой поверхности  (Рисс.1). Условно примем к телу переносную силу инерции
(Рисс.1). Условно примем к телу переносную силу инерции  (модуль которой
(модуль которой  где m -масса тела), направленную противоположно переносному ускорению
где m -масса тела), направленную противоположно переносному ускорению  которое представляет собой ускорение призмы.
которое представляет собой ускорение призмы.
Тогда

Спроектируем это уравнение на оси  и
и  которые связанные с подвижной призмой:
которые связанные с подвижной призмой:

С первого уравнения найдем модуль ускорения 

С учетом числовых значений:

Определим переносную силу инерции:

Из второго уравнения определим модуль реакции призмы:

С учетом числовых значений:

Давление R тела на призму по модулю равно реакции N, но направлено в противоположную сторону.
Ответ: 
Задания темы Д3
Груз массой m закреплен на упругом подвесе в лифте (рис. д3.12), который движется вертикально вверх по закону  где z — в метрах, t — в секундах. Кроме сил притяжения
где z — в метрах, t — в секундах. Кроме сил притяжения  и упругости
и упругости  в некоторых вариантах на груз действует еще сила сопротивления среды, модуль которой
в некоторых вариантах на груз действует еще сила сопротивления среды, модуль которой  где V — скорость груза относительно лифта.
где V — скорость груза относительно лифта.
Найти закон движения груза относительно лифта  Массой пружины и соединительной планки пренебречь и принять
Массой пружины и соединительной планки пренебречь и принять 
Напоминаем, что схема подвеса (рис. Д3.12) определяется первой цифрой шифра, а номер варианта в таблице Д3.1 определяется второй цифрой шифра.
В таблице Д3.1 кроме коэффициентов  и
и  обозначено:
обозначено:  жесткости пружин,
жесткости пружин,  удлинение пружины с эквивалентной жесткостью в начальный момент времени
удлинение пружины с эквивалентной жесткостью в начальный момент времени  начальная скорость груза относительно лифта (направлена так, как положительное направление оси
начальная скорость груза относительно лифта (направлена так, как положительное направление оси  ). Если в столбцах
). Если в столбцах  стоит
стоит  это значит, что соответствующая пружина отсутствует и на рисунке изображаться не должна. Если при этом конец одной из оставшихся пружин является свободным, его следует прикрепить в соответствующем месте либо к телу, либо к потолку (полу) лифта; то же следует сделать, если свободными будут концы обеих пружин, которые соединены планкой. Условие
это значит, что соответствующая пружина отсутствует и на рисунке изображаться не должна. Если при этом конец одной из оставшихся пружин является свободным, его следует прикрепить в соответствующем месте либо к телу, либо к потолку (полу) лифта; то же следует сделать, если свободными будут концы обеих пружин, которые соединены планкой. Условие  означает, что сила сопротивления среды R отсутствует.
означает, что сила сопротивления среды R отсутствует.


Указания. Сначала надо изобразить расчетную схему, для чего пружины, которые прикреплены к грузу (по условию задачи их будет две), заменить одной с эквивалентной жесткостью 
 сделав соответствующий расчет. Если груз прикреплен к пружинам, которые соединены последовательно, то
сделав соответствующий расчет. Если груз прикреплен к пружинам, которые соединены последовательно, то  Если груз, прикрепленный к пружинам, которые соединены параллельно, или находится между двумя пружинами, то
Если груз, прикрепленный к пружинам, которые соединены параллельно, или находится между двумя пружинами, то  Начало О координатных осей
Начало О координатных осей  расположить в положении статического равновесия груза при недвижном лифте; направить ось
расположить в положении статического равновесия груза при недвижном лифте; направить ось  в сторону удлинения пружины, а груз изобразить в текущем положении, когда пружина растянута
в сторону удлинения пружины, а груз изобразить в текущем положении, когда пружина растянута 
Затем необходимо составить дифференциальное уравнение. относительного движения (относительно лифта) груза, который рассматривается в задаче, для чего присоединить к действующим силам переносную силу инерции. При этом следует помнить, что сила инерции направлена противоположно соответствующему ускорению. Полученное линейное неоднородное дифференциальное уравнение второго порядка следует проинтегрировать с учетом начальных условий.
Пример решения темы Д3
Дано:

Определить: 
Решение. Заменяем систему из двух пружин (рис. Д3.13) одной пружиной с эквивалентной жесткостью. Поскольку пружины установлены параллельно, то жесткость эквивалентной пружины равна:



Создадим расчетную схему колебательной системы (рис.Д3.14).
При неподвижном лифте в положении статического равновесия груза эквивалентна пружина, длина которой в недеформированном состоянии  под действием силы притяжения
под действием силы притяжения  будет сжата на величину
будет сжата на величину 
Из условия равновесия следует, что:

Свяжем с лифтом подвижную систему отсчета  начало О которой расположим в положении статического равновесия груза, а ось
начало О которой расположим в положении статического равновесия груза, а ось  направим вертикально вверх (в сторону удлинения пружины).
направим вертикально вверх (в сторону удлинения пружины).
Рассмотрим груз в положении, при котором  и пружина растянута на величину
и пружина растянута на величину 
Изобразим все силы, действующие на груз:  силу притяжения,
силу притяжения,  силу упругости,
силу упругости,  силу сопротивления среды,
силу сопротивления среды,  переносную силу инерции.
переносную силу инерции.
Запишем уравнение относительного движения груза в векторной форме и в проекциях на ось 

В уравнении (2):

Учитывая, что оси  и
и  направлены одинаково, получим:
направлены одинаково, получим:

Тогда

Подставляя все эти величины в (2) и учитывая, что  получим:
получим:

Поделив на массу  и перегруппировав составляющие, получим:
и перегруппировав составляющие, получим:

Обозначим в уравнении (4):

окончательно получим дифференциальное уравнение относительного движения груза (уравнение затухающих колебаний)

где 
Уравнение (5) линейное неоднородное дифференциальное уравнение второго порядка. Его общее решение представляет собой сумму двух решений:  общего решения однородного уравнения и
общего решения однородного уравнения и  частичного решения уравнения (5),
частичного решения уравнения (5),
то есть

Общее решение однородного уравнения  имеет вид (Д3.11):
имеет вид (Д3.11):

где  условная частота затухающих колебаний :
условная частота затухающих колебаний :

Тогда с учетом , что  получим:
получим:

Частичное решение уравнения (5) будем искать в виде его правой части, то есть:

Для определения Д находим  и подставляем в (5):
и подставляем в (5):

Отсюда

Поскольку  то общее решение(5) уравнения (6) будет иметь вид:
то общее решение(5) уравнения (6) будет иметь вид:

* В тех вариантах, где  (сопротивление среды не учитывается) будет получено неоднородное дифференциальное уравнение вынужденных колебаний вида
(сопротивление среды не учитывается) будет получено неоднородное дифференциальное уравнение вынужденных колебаний вида  или
или  где
где  Общее решение
Общее решение
этих уравнений  где
где  общее решение однородного уравнения
общее решение однородного уравнения  а частичное решение уравнения
а частичное решение уравнения  которое ищут в виде правой части неоднородного уравнения.
которое ищут в виде правой части неоднородного уравнения.
Для определения постоянных интегрирования  и
и  найдем
найдем 

В начальный момент времени, когда 

Подставляя эти начальные данные в уравнение (9) и (10) находим  и
и 
 откуда
откуда 
 откуда
откуда 
Таким образом уравнение (9) примет окончательный вид:

Ответ: закон движения груза относительно лифта 
Теоремы о движении центра масс и об изменении количества движения механической системы
Краткие сведения по теории о движении центра масс механической системы:
Механической системой или системой материальных точек называется такая совокупность материальных тел (точек), в которой положение и движение каждого
тела (точки) зависит от положения и движения всех других.
Частичным случаем механической системы является абсолютно твердое тело, которое рассматривается как система взаимодействующих материальных точек, расстояние между которыми не меняется.
Внешними силами  называются силы, с которыми действуют на тела (точки) механической системы другие тела (точки), которые не входят в данную систему.
называются силы, с которыми действуют на тела (точки) механической системы другие тела (точки), которые не входят в данную систему.
Замкнутой, или изолированной системой, называется механическая система, на которую не действуют внешние силы.
Внутренними силами  системы называются силы взаимодействия тел (точек) данной механической системы между собой.
системы называются силы взаимодействия тел (точек) данной механической системы между собой.
Свойства внутренних сил
1. Геометрическая сумма (главный вектор) всех внутренних сил равен нулю:

2. Сумма моментов (главный момент) всех внутренних сил системы относительно любого центра О или оси, например  равняется нулю:
равняется нулю:

или

Массой М механической системы называется сумма масс всех тел (точек), которые входят в данную систему:

Центром масс или центром инерции механической системы называется точка С, положение которой относительно выбранной системы отсчета определяется радиус вектором  (рис. Д4.1),что вычисляемая по формуле:
(рис. Д4.1),что вычисляемая по формуле:

где М — масса всей системы;
 и
и  масса и радиус-вектор k-ой точки системы.
масса и радиус-вектор k-ой точки системы.
В декартовой системе координат положения центра масс определяется по формулам:

Теорема о движении центра масс механической системы
Произведение массы М системы на ускорение ее центра масс  равняется главному вектору (геометрической сумме) всех внешних сил, действующих на систему:
равняется главному вектору (геометрической сумме) всех внешних сил, действующих на систему:

В проекциях на оси декартовой системы координат уравнение (Д4.5) имеет вид:

Из теоремы (Д4.5) в виде двух последствий следует закон сохранения движения центра масс системы:
1. Если главный вектор внешних сил равен нулю, то вектор скорости центра масс остается постоянным, то есть:
если 
В частности, если в начальный момент времени 
то центр масс не будет перемещаться. Если  то центр масс движется равномерно и прямолинейно.
то центр масс движется равномерно и прямолинейно.
2. Если главный вектор внешних сил не равен нулю, но его проекция на любую ось равна нулю, то соответствующая проекция скорости центра масс остается
постоянной, то есть:
если  но, например,
но, например, 
то  и.
и. 
В частности, если в начальный момент  центр масс системы вдоль оси
центр масс системы вдоль оси  двигаться не будет
двигаться не будет 
Порядок решения задач на применение теоремы о движении центра масс
Рекомендуется следующая последовательность решения задач:
1. Изобразить на рисунке все внешние силы, которые действуют на систему.
2. Выбрать систему координат.
3. Записать теорему о движении центра масс в векторной форме.
4. Спроектировать это векторное уравнение на оси координат.
5. Вычислить суммы проекций всех внешних сил на оси координат и подставить их в проекции уравнения движения.
6. Решить полученные уравнения и найти величины, которые надо определить.
Примеры решения задач
Задача 1
Определить главный вектор внешних сил, действующих на колесо весом Р, которое скатывается без скольжения с наклонной плоскости, если его центр масс С движется по закону 

Решение. Покажем внешние силы, которые действуют на колесо: силу притяжения  и реакцию поверхности
и реакцию поверхности  которые проходят через центр масс колеса С.
которые проходят через центр масс колеса С.
Запишем теорему про движение центра масс в векторной форме:

Выберем систему координат  и спроектируем уравнение (1) на оси
и спроектируем уравнение (1) на оси  и
и 

Поскольку  и
и  То есть, главный вектор внешних сил является параллельным оси
То есть, главный вектор внешних сил является параллельным оси 
Найдем проекцию ускорения центра масс на ось

Итак,

Ответ: .
Задача 2
Колесо весом Р и радиусом r катится с скольжением по прямолинейной горизонтальной рейке в следствии действия устойчивой силы  которая приложена к его центру тяжести С (рис.1).
которая приложена к его центру тяжести С (рис.1).

Определить скорость центра масс колеса, если в начальный момент оно
находилось в покое. Коэффициент трения скольжения равен 
Решение. На колесо действуют внешние силы:  сила притяжения колеса,
сила притяжения колеса,  движущая сила,
движущая сила,  нормальная реакция рейки,
нормальная реакция рейки,  сила трения скольжения, которая направлена вдоль рейки в сторону, противоположной силы
сила трения скольжения, которая направлена вдоль рейки в сторону, противоположной силы 
Запишем теорему о движении центра масс колеса в векторной форме:

где  ускорение центра масс колеса.
ускорение центра масс колеса.
Выберем систему координат  и спроектируем уравнение (1) на оси
и спроектируем уравнение (1) на оси  и
и 

При движении колеса  Итак,
Итак, и со второго уравнения (1) получаем:
и со второго уравнения (1) получаем:

Поскольку при качении колеса со скольжением сила трения достигает своего максимального значения, то

Подставим (3) в первое из уравнений (1) и получим:

Поскольку  то:
то:

Согласно начальным условиям при  то произвольная постоянная
то произвольная постоянная 
Итак, закон изменения скорости центра масс колеса С имеет вид :

Ответ: 
Задача 3
Однородный стержень  длиной
длиной  и массой
и массой  (рис. 1, а) расположен в вертикальной плоскости и шарнирно соединен со стержнем 2 (шарнир D). Стержень 2
(рис. 1, а) расположен в вертикальной плоскости и шарнирно соединен со стержнем 2 (шарнир D). Стержень 2
массой  может двигаться в горизонтальных направляющих. Стержень 1 удерживается под углом
может двигаться в горизонтальных направляющих. Стержень 1 удерживается под углом  к горизонту вертикальной нитью в точке А.
к горизонту вертикальной нитью в точке А.
Определить, какое смещение получит стержень 2, если нить в точке А оборвется и стержень 1 упадет на стержень 2 (рис. 1, б). Силами трения в направляющих  и С пренебречь.
и С пренебречь.

Решение. Покажем все внешние силы, что действуют на материальную систему, состоящую из стержней 1 и 2. Внешними силами будут:  сила притяжения стержня 1;
сила притяжения стержня 1;  сила притяжения стержня 2;
сила притяжения стержня 2;  реакция нити;
реакция нити;  и
и  реакции направляющих
реакции направляющих  и С.
и С.
Выберем прямоугольную систему координат  одну с осей которой
одну с осей которой  направим по оси стержня 2 (рис. 1, а). Запишем теорему о движении цента масс механической системы в проекции на ось
направим по оси стержня 2 (рис. 1, а). Запишем теорему о движении цента масс механической системы в проекции на ось  (Д4.6):
(Д4.6): 
где  масса системы
масса системы 
 координата центра масс системы.
координата центра масс системы.
В данной задаче все внешние силы перпендикулярные к оси  то есть
то есть  Согласно закону о сохранении движения центра масс (Д4.8), если
Согласно закону о сохранении движения центра масс (Д4.8), если  то:
то:

Поскольку в начальный момент времени система не двигалась, то есть 
Таким образом, абсцисса центра масс механической системы не зависит от перемещения стержней, которые входят в систему, и остается неизменной по отношению к неподвижной системе координат 
Запишем выражение для определения абсциссы центра масс системы в начальный момент времени:

где  абсцисса центра масс стержня 1;
абсцисса центра масс стержня 1;
 абсцисса центра масс стержня 2.
абсцисса центра масс стержня 2.
Не нарушая общности задачи, примем, что центр масс стержня 2 совпадает с центром шарнира D.
Тогда (рис 1а):

С учетом последней зависимости и того, что
 и
и  уравнение (1) имеет вид:
уравнение (1) имеет вид:

При обрыве нити, удерживающей стержень 1, под действием
силы притяжения  стержень начнет падать вниз, опираясь при этом в шарнире D на стержень 2. Стержень 2 при этом сместится слева. Конечное положение стержня
стержень начнет падать вниз, опираясь при этом в шарнире D на стержень 2. Стержень 2 при этом сместится слева. Конечное положение стержня
2 показано на рис. 1, б.
Запишем выражение для определения абсциссы  центра масс в конечном положении системы:
центра масс в конечном положении системы:

где  новое значение абсциссы центра масс стержня 1;
новое значение абсциссы центра масс стержня 1;
 новое значение абсциссы центра масс стержня 2.
новое значение абсциссы центра масс стержня 2.
Определим новые значения абсцисс  и
и  Пусть стержень 2 сместится слева на некоторое расстояние
Пусть стержень 2 сместится слева на некоторое расстояние  (рис. 1, б). Тогда:
(рис. 1, б). Тогда:

С учетом (4) выражение (3) приобретёт вид:

или

Откуда

Поскольку  то, сравнивая (2) и (4), получим:
то, сравнивая (2) и (4), получим:

Решив данное уравнение относительно  получим:
получим:

Таким образом, при падении стержня 1 на стержень 2 система сместится слева на расстояние 
Ответ: 
Теоремы об изменении количества движения материальной точки и механической системы
Количеством движения материальной точки называется векторная величина  равная произведению массы m точки на ее скорость
равная произведению массы m точки на ее скорость  и направлена за
и направлена за
вектором скорости, то есть:

Единицей количества движения в системе СИ является килограмм метр в секунду:

Теорема об изменении количества движения материальной точки в дифференциальной форме имеет вид:

то есть производная по времени от количества движения материальной точки равна геометрической сумме всех действующих сил на эту точку.
Теорема об изменении количества движения материальной точки в интегральной форме:

то есть изменение количества движения материальной точки за некоторый промежуток времени равен геометрической сумме импульсов всех сил, действующих на эту точку.
Импульс силы  характеризует действие силы
характеризует действие силы  за некоторый промежуток времени t. Если сила
за некоторый промежуток времени t. Если сила  постоянная, то импульс силы
постоянная, то импульс силы  по направлению совпадает с направлением силы и равняеться:
по направлению совпадает с направлением силы и равняеться:

Векторному уравнению (Д4.11) соответствует три уравнения в проекциях на оси декартовой системы координат:

Количеством движения механической системы называется векторная величина  равная геометрической сумме (главному вектору) количеств движений всех тел (точек) этой системы:
равная геометрической сумме (главному вектору) количеств движений всех тел (точек) этой системы:

Количество движения системы можно также выразить через массу М всей системы и скорость  ее центра масс:
ее центра масс:

Теорема про изменения количества движения системы в дифференциальной форме выражается формулой:

то есть производная по времени от количества движения механической системы равна главному вектору внешних сил, которые действуют на систему.
Если спроектировать векторное уравнение (Д4.16) на оси декартовой системы координат, то получим запись теоремы в скалярном виде:

Из теоремы в виде двух выводов следует закон сохранения количества движения механической системы:
1. Если главный вектор внешних сил равен нулю, то количество движения системы остается постоянным, то есть:
если 
2. Если главный вектор внешних сил не равен нулю, но его проекция на любую ось равна нулю, то проекция количества движения системы на эту ось остается постоянной, то есть:
если  но, например
но, например 
то  и
и 
Наконец заметим, что поскольку в формулы, которые выражают обе теоремы, внутренние силы не входят, то изменить количество движения механической системы и движение ее центра масс могут только внешние силы.
Если обозначить количество движения системы в начальный момент времени  а количество движения системы в конечный момент времени
а количество движения системы в конечный момент времени  то теорема об изменении количества движения механической системы в интегральной форме имеет вид:
то теорема об изменении количества движения механической системы в интегральной форме имеет вид:

то есть изменение количества движения механической системы за некоторый
промежуток времени равен геометрической сумме импульсов внешних сил  которые действуют на систему, за тот же промежуток времени.
которые действуют на систему, за тот же промежуток времени.
Если спроектировать векторное уравнение (Д4.20) на оси декартовой системы координат, то получим запись теоремы об изменении количества движения механической системы в интегральной форме в скалярном виде:

Порядок решения задач на применение теоремы об изменении количества движения точки и механической системы
Для материальной точки:
1. Изобразить на рисунке все силы, которые приложены к материальной точки, то есть активные силы и реакции связей.
2. Выбрать систему координат.
3. Записать теорему об изменении количества движения точки в векторной форме.
4. Спроектировать векторное уравнение на оси выбранной системы координат.
5. Решить полученные уравнения и определить искомые
величины.
Для механической системы:
1. Изобразить на рисунке все внешние силы.
2. Выбрать систему координат.
3. Записать теорему об изменении количества движения системы в векторной форме.
4. Спроектировать векторное уравнение на оси выбранной системы координат.
5. Решить полученные уравнения и определить искомые величины
Примеры решения задач
Задача 1
Железнодорожный поезд движется по горизонтальной и прямолинейной области пути (рис.1). При торможении до полной остановки развивается сила сопротивления, равная
 веса поезда. В момент начала торможения скорость V поезда составляла 72 км/ч.
веса поезда. В момент начала торможения скорость V поезда составляла 72 км/ч.
Определить время t и путь L торможения.
Решение. Изобразим силы (рис.1), которые действуют на поезд во время торможения: силу тяжести поезда  нормальную реакцию пути
нормальную реакцию пути  силу сопротивления
силу сопротивления  которая по величине равняется
которая по величине равняется 

Выберем систему координат. Поскольку движение прямолинейное и горизонтальное, достаточно рассмотреть движение в направлении оси 
Будем рассматривать поезд как материальную точку. Запишем теорему об изменении количества движения поезда в интегральной форме (Д4.11):

где m — масса поезда;
 конечная и начальная скорость поезда;
конечная и начальная скорость поезда;
 импульсы сил
импульсы сил  которые действуют на поезд во время торможения.
которые действуют на поезд во время торможения.
Спроектируем векторное уравнение (1) на ось  (Д4.13):
(Д4.13):

Проекции импульсов сил  и
и  на ось
на ось  равняются нулю, поскольку векторы
равняются нулю, поскольку векторы  и
и  перпендикулярны к этой оси.
перпендикулярны к этой оси.
Сила сопротивления  во время торможения по величине не изменяется, следовательно, ее импульс равен (Д4.12):
во время торможения по величине не изменяется, следовательно, ее импульс равен (Д4.12):

Скорость в конце области торможения равна нулю, то есть 
Окончательно, уравнение импульсов (2) в проекции на ось  примет вид:
примет вид:
 или
или 
Откуда
 или с учетом числовых значений для
или с учетом числовых значений для  и
и  получим:
получим:

Запишем основной закон динамики для материальной точки в проекции на ось 

Поскольку  то и
то и  Таким образом, для определения тормозного пути воспользуемся формулой для равно измененного движения:
Таким образом, для определения тормозного пути воспользуемся формулой для равно измененного движения:

В этом случае ускорение поезда определяется из формулы:

то есть

Тогда

Ответ: 
Задача 2
По шероховатой наклонной плоскости, которая образует с горизонтом угол  спускается тяжелое тело без первоначальной скорости.
спускается тяжелое тело без первоначальной скорости.
Определить время T, за которое тело пройдет путь длиной  если коэффициент трения
если коэффициент трения  и
и 
Решение. Во время движения на тело действуют сила трения тела  нормальная реакция поверхности
нормальная реакция поверхности  и сила трения , которая направлена в сторону противоположную движению тела (Рисс.1).
и сила трения , которая направлена в сторону противоположную движению тела (Рисс.1).

Запишем теорему об изменении количества движения в векторной форме:

Направим ось  вдоль наклонной поверхности вниз и спроектируем равенство (1) на эту ось:
вдоль наклонной поверхности вниз и спроектируем равенство (1) на эту ось:

Проекция импульса нормальной реакции  на ось
на ось  равняется нулю, поскольку сила
равняется нулю, поскольку сила  перпендикулярна
перпендикулярна 
Учитывая, что во время движения сила тяжести  и сила трения
и сила трения  не меняются, то:
не меняются, то:

Кроме того:

С учетом записанного уравнения (2) имеет вид:

Найдем силу трения:

Подставив  в уравнение (3) получим:
в уравнение (3) получим:

или

Тогда

Поскольку  и
и  то
то

Воспользовавшись полученной зависимостью, сначала определим ускорение тела, а после этого — время движения. Поскольку для равноускоренного движения  и при
и при  то:
то:
 или
или 
По формуле  учитывая, что при
учитывая, что при  путь
путь  получим
получим

Из этой формулы находим время движения T:

Ответ: 
Задача 3
По понтонному мосту массой М движется автомобиль массой m по закону

Пренебрегая сопротивлением воды определить:
1. Скорость  с которой двигался бы мост во время движения автомобиля, если бы он не был прикреплен тросами к берегу.
с которой двигался бы мост во время движения автомобиля, если бы он не был прикреплен тросами к берегу.
2. Силу  натяжения тросов, с помощью которых мост крепится к берегу.
натяжения тросов, с помощью которых мост крепится к берегу.
Решение.
1. Сначала рассмотрим случай, когда мост не прикреплен к берегу, то есть  Для определения скорости
Для определения скорости  моста воспользуемся теоремой об изменении количества движения механической системы.
моста воспользуемся теоремой об изменении количества движения механической системы.
На систему, которая состоит из моста и автомобиля, действуют внешние силы: сила тяжести моста  сила тяжести автомобиля
сила тяжести автомобиля  и выталкивающая сила воды
и выталкивающая сила воды  (рис. 1).
(рис. 1).
Все силы, которые действуют на систему, являются вертикальными.

Свяжем с берегом неподвижную систему координат  в отношении которой будем изучать движение системы, причем ось
в отношении которой будем изучать движение системы, причем ось  направим параллельно поверхности воды, то есть перпендикулярно внешним силам, действующим на систему.
направим параллельно поверхности воды, то есть перпендикулярно внешним силам, действующим на систему.
Закон движения автомобиля  задан в отношении моста.
задан в отношении моста.
Таким образом, относительная скорость автомобиля от  будет изменяться по закону
будет изменяться по закону

а абсолютная скорость автомобиля  по закону
по закону

где  абсолютная скорость моста.
абсолютная скорость моста.
Поскольку скорость автомобиля зависит от времени, то для решения задачи воспользуемся теоремой о изменении количества движения системы в дифференциальной форме в проекции на ось  (Д4.17):
(Д4.17):

Учитывая, что 
где  проекция количества движения системы на ось
проекция количества движения системы на ось 
Проекция количества движения системы на ось  равна сумме проекций на эту ось количеств движения автомобиля
равна сумме проекций на эту ось количеств движения автомобиля  и понтонного моста
и понтонного моста 

где

Тогда

или

Подставим (2) в (1) и сдиференцируем по времени:

Таким образом, чтобы найти выражение для  необходимо разделить переменные в уравнение (3) и проинтегрировать полученное уравнение по скорости от 0 до
необходимо разделить переменные в уравнение (3) и проинтегрировать полученное уравнение по скорости от 0 до  и по времени от 0 до t:
и по времени от 0 до t:

Окончательно получим

Знак минус указывает на то, что скорость моста направлена в сторону, которая противоположна движению автомобиля.
2. Рассмотрим случай, когда мост прикреплен тросами к берегу.
В этом случае к вертикальным силам  и
и  что действуют на систему, добавляется горизонтальная сила
что действуют на систему, добавляется горизонтальная сила  (рис. 1) от натяжения тросов.
(рис. 1) от натяжения тросов.
Используем дифференциальное уравнение изменения количества движения в проекции на ось  (Д4.17):
(Д4.17):

Задания темы Д4
Механическая система состоит из грузов 1 массой и 2 массой
и 2 массой 
и прямоугольной вертикальной плиты 3 массой  которая движется вдоль горизонтальных направляющих (рис. Д4.2, табл. Д4). В момент времени
которая движется вдоль горизонтальных направляющих (рис. Д4.2, табл. Д4). В момент времени 
когда скорость плиты  грузы под действием внутренних сил начинают двигаться по желобам плиты. Груз 1 движется по дуге полукруга радиуса R по закону
грузы под действием внутренних сил начинают двигаться по желобам плиты. Груз 1 движется по дуге полукруга радиуса R по закону
 где
где  выражено в радианах, t- в секундах. (Ось, от которой ведется отсчет угла
выражено в радианах, t- в секундах. (Ось, от которой ведется отсчет угла  , и направление положительного отсчета указаны на рис. Д4.2). Груз 2 движется от точки
, и направление положительного отсчета указаны на рис. Д4.2). Груз 2 движется от точки  прямолинейно по закону
прямолинейно по закону  где S выражена в метрах, t- в секундах. (На рис. Д.2 груз 2 изображен в сторону положительного отсчета пути S).
где S выражена в метрах, t- в секундах. (На рис. Д.2 груз 2 изображен в сторону положительного отсчета пути S).
Определить зависимость  то есть скорость движения плиты как функцию времени, считая грузы материальными точками и пренебрегая всеми силами сопротивления движению
то есть скорость движения плиты как функцию времени, считая грузы материальными точками и пренебрегая всеми силами сопротивления движению
Указание. Задачу темы Д4 решить двумя способами:
а) применяя теорему о движении центра масс механической системы;
б) применяя теорему об изменении количества движения механической системы.
Как и в предыдущих задачах первая цифра шифра определяет номер рисунка на рис. Д4.2, а вторая — вариант в Д4 таблицы.


Пример решения темы Д4
Дано: 

Определить: 
Решение. Рассмотрим механическую систему, которая состоит из плиты 3 и грузов 1 и 2 в произвольном положении (рис. Д4.3).
Покажем все внешние силы, которые действуют на систему: силы притяжения
 и реакция направляющих
и реакция направляющих 
Проведем координатные оси  так, чтобы ось
так, чтобы ось  проходила через
проходила через
точку,  где находится центр масс плиты
где находится центр масс плиты  в начальный момент времени
в начальный момент времени 

а) Определим  с помощью теоремы о движении центра масс механической системы.
с помощью теоремы о движении центра масс механической системы.
Поскольку  то необходимо знать уравнение движения плиты, то есть
то необходимо знать уравнение движения плиты, то есть  Запишем дифференциальное уравнение движения центра масс плиты в проекции на ось
Запишем дифференциальное уравнение движения центра масс плиты в проекции на ось 

где  масса системы.
масса системы.
Поскольку все внешние силы, которые действуют на систему, вертикальные, то  и по закону сохранение движения центра масс системы (Д4.8).
и по закону сохранение движения центра масс системы (Д4.8).  Таким образом, произведение массы системы
Таким образом, произведение массы системы  на скорость центра масс будет величиной постоянной, то есть:
на скорость центра масс будет величиной постоянной, то есть:
 или
или 
Отделяя переменные и интегрируя последнее уравнение получим:

где  и
и  постоянные интегрирования.
постоянные интегрирования.
Из формулы (Д4.4) определим значение: 

Выразим координаты  и
и  через координату
через координату  Из рис. Д4.3 видно, что в произвольный момент времени абсцисса первого груза:
Из рис. Д4.3 видно, что в произвольный момент времени абсцисса первого груза:

а абсцисса второго груза:

Подставляя (4) и (5) в (3), получим:

После подстановки зависимостей для  и S, получим:
и S, получим:

Подставляя уравнение (6) в (2), получим:

отсюда уравнения движения плиты будет иметь вид:

Для определения скорости плиты  сдифференцируем по времени уравнения (8):
сдифференцируем по времени уравнения (8):

Постоянное интегрирование  определим из начальных условий: при
определим из начальных условий: при  скорость
скорость  Подставив эти значения в уравнение (9), получим
Подставив эти значения в уравнение (9), получим

Таким образом скорость плиты 3 будет меняться по закону:


где

Подставляя полученные выражения для  и
и  в уравнение (12) получим:
в уравнение (12) получим:


В соответствии с (10) выражения (11) и (13) равны, то есть:

Отсюда окончательно получим:

Ответ: скорость движения плиты 3, как функция времени 
Замечания. Поскольку две теоремы являются разными формами одного и того же закона, то выбор, какую из них использовать, зависит от характера задачи, которая решается. При изучении движения одного твердого тела (или системы тел) можно с одинаковым успехом пользоваться любой из этих форм. Если же рассматривается движение
сплошной среды (жидкости или газа), то понятия про центр масс системы практически теряет свое содержание. В этих случаях используют теорему об изменении количества
движения.
Теорема о смене кинетической энергии механической системы
Краткие сведения по теории
Кинетической энергией материальной точки называется скалярная положительная величина, равная половине произведения массы точки на квадрат ее скорости:

Единицей кинетической энергии в системе CИ является Джоуль (Дж):

Кинетическая энергия механической системы n материальных точек (тел) называется арифметическая сумма кинетических энергий всех точек (тел) системы:

Кинетическая энергия твердого тела в простейших случаях его движения исчисляют по формулам:
а) при поступательном движении тела

где M — масса тела;
V — скорость любой его точки.
б) при вращении тела вокруг неподвижной оси

где  момент инерции тела относительно оси вращения z;
момент инерции тела относительно оси вращения z;
 угловая скорость тела.
угловая скорость тела.
в) при плоскопаралельном движении тела

где M — масса тела;
 модуль скорости его центра масс;
модуль скорости его центра масс;
 момент инерции тела относительно оси z, которая проходит через центр масс перпендикулярно к плоскости в которой движется тело;
момент инерции тела относительно оси z, которая проходит через центр масс перпендикулярно к плоскости в которой движется тело;
 угловая скорость тела.
угловая скорость тела.
Элементарной работой  переменной силы
переменной силы 
называется скалярная мера действия силы, равная скалярной добыче силы на элементарное перемещение  точки ее примера:
точки ее примера:

где  угол между векторами
угол между векторами  и
и 
В зависимости от угла  работа может быть положительной, если
работа может быть положительной, если  острый угол
острый угол  отрицательной, если
отрицательной, если  тупой угол
тупой угол  равняться нулю, если
равняться нулю, если  прямой угол
прямой угол 
Кроме того, работа равна нулю, если в данный момент  а также если
а также если  то есть в момент, когда точка приложения силы неподвижна. В частности, силы, которые приложены в мгновенном центре скоростей тела, работы не осуществляют.
то есть в момент, когда точка приложения силы неподвижна. В частности, силы, которые приложены в мгновенном центре скоростей тела, работы не осуществляют.
Единицей работы в СИ является Джоуль (Дж):

Выражение элементарной работы переменной силы через проекции силы и элементарного перемещения на оси декартовых координат имеет вид:

Работа А переменной силы  на конечном перемещении
на конечном перемещении по произвольной траектории равно криволинейному интегралу от элементарной работы этой силы, который берется вдоль дуги кривой от
по произвольной траектории равно криволинейному интегралу от элементарной работы этой силы, который берется вдоль дуги кривой от  до
до 

где  проекция силы на направление касательной оси
проекция силы на направление касательной оси 
к траектории в данной точке, или в координатном виде:

В некоторых отдельных случаях работа вычисляется по готовым формулам:
1. Работа постоянной силы на прямолинейном перемещении ее точки приложения

где S — путь, который прошла точка приложения силы 
 угол между векторами силы и перемещения
угол между векторами силы и перемещения  точки приложения силы.
точки приложения силы.
2. Работа силы тяжести

где  модуль силы тяжести,
модуль силы тяжести,
 вертикальное перемещение силы
вертикальное перемещение силы 
Знак «+» берется, если точка приложения движется вниз, знак «-«, если вверх.
3. Работа силы упругости

где  жесткость пружины;
жесткость пружины;
 начальное удлинение (сжатие) пружины;
начальное удлинение (сжатие) пружины;
 конечное удлинение (сжатие) пружины.
конечное удлинение (сжатие) пружины.
Работа будет положительной, если,  то есть когда конец пружины движется к положению равновесия, в какому пружина недеформированная. Работа будет отрицательной, если,
то есть когда конец пружины движется к положению равновесия, в какому пружина недеформированная. Работа будет отрицательной, если,  то есть когда конец пружины отдаляется от положения равновесия.
то есть когда конец пружины отдаляется от положения равновесия.
4. Работа силы, которая приложена к телу, которое вращается вокруг неподвижной оси

где  момент силы
момент силы  относительно оси вращения z;
относительно оси вращения z;
 и
и  начальное и конечное значение угла поворота тела.
начальное и конечное значение угла поворота тела.
Если  то:
то:

Теорема об изменении кинетической энергии материальной точки в интегральной форме
Изменение кинетической энергии материальной точки на ее перемещении 
равняется сумме работ всех сил, которые действуют на эту точку, в пределах того же перемещения:

Если сумма работ сил положительная, то  и кинетическая энергия точки растет. Если же сумма работ отрицательная, то
и кинетическая энергия точки растет. Если же сумма работ отрицательная, то  и кинетическая энергия точки уменьшается.
и кинетическая энергия точки уменьшается.
В случае несвободного движения точки в правую часть уравнения (Д5.15) кроме работ активных сил войдут также и работы реакций связей.
Если материальная точка движется по гладкой поверхности (сила трения равна нулю), то реакция поверхности будет направлена перпендикулярно к поверхности (перпендикулярно к перемещению точки) и ее работа будет равняться нолю. Таким образом, при перемещении материальной точки по гладкой поверхности изменение кинетической энергии будет определяться суммой работ на этом перемещении только приложенных к точке активных сил.
Теорема об изменении кинетической энергии механической системы в интегральной форме
Изменение конечной энергии системы на ее конечном перемещении (0-1) равно сумме работ всех внешних и внутренних сил системы на этом перемещении:

Для неизменной системы (твердое тело, гибкая нерастяжимая нить)  и поэтому для нее
и поэтому для нее

Изменение кинетической энергии неизменной системы на ее конечном перемещении (0-1) равняется сумме работ всех внешних сил, действующих на систему на этом перемещении.
Порядок решения задач на применение теоремы об изменении кинетической энергии в интегральной форме
Решение задач с помощью теоремы об изменении кинетической энергии в интегральной форме рекомендуется проводить в следующей последовательности:
1. Показать на рисунке все внешние силы системы.
2. Вычислить сумму работ всех внешних сил на перемещении точек системы.
3. Вычислить кинетическую энергию механической системы в начальном и конечном ее состояниях.
4. Пользуясь результатами подсчетов по пунктам 2 и 3, записать теорему об изменении кинетической энергии механической системы и определить величину параметры, которой нужно найти.
Примеры решения задач
Задача 1
Определить наименьшую работу А, которую необходимо выполнить, чтобы поднять на высоту  груз
груз  передвигая его по наклонной плоскости, которая составляет с горизонтом угол
передвигая его по наклонной плоскости, которая составляет с горизонтом угол  коэффициент трения скольжения
коэффициент трения скольжения 
Решение: Изобразим груз в произвольном положении на наклонной плоскости и покажем все силы, что на его действуют (рис.1): силу притяжения  силу трения и нормальную реакцию
силу трения и нормальную реакцию 

Работа, которая тратится на поднимание груза на высоту h = 5 м, равна сумме робот силы трения вдоль длины АВ и силы притяжения на перемещении ВС точки ее приложения.
Нормальная реакция работы не выполняет, поскольку она перпендикулярна перемещению.
Вычислим работу силы трения:

Поскольку  и
и 



Работа силы притяжения в нашем случае отрицательна, поскольку груз движется вверх, и равен:

Полная работа, потраченная на поднимание груза, равняется:


Ответ: 
Задача 2
Тело А (рис.1) удерживается в равновесии на гладенькой наклонной поверхности, расположенной под углом  к горизонту, с помощью пружины. В результате полученного толчка тело переместилось вниз по наклонной поверхности на расстояние
к горизонту, с помощью пружины. В результате полученного толчка тело переместилось вниз по наклонной поверхности на расстояние
L .
Определить сумму работ А всех сил, приложенных к телу на этом перемещении, если сила притяжения тела  угол
угол  жесткость пружины
жесткость пружины

Решение. К телу приложены следующие силы: сила притяжения  нормальная реакция поверхности
нормальная реакция поверхности  и сила упругости растянутой пружины
и сила упругости растянутой пружины  (рис.1).
(рис.1).

Ось  направим параллельно наклонной поверхности, а начало отсчета О соединим с концом недеформированной пружины.
направим параллельно наклонной поверхности, а начало отсчета О соединим с концом недеформированной пружины.
Поскольку  то:
то:

или

Окончательно,

Работа нормальной реакции R равна нулю, поскольку эта сила перпендикулярна к перемещению тела, то есть 
Итак,

Ответ: 
Задача 3
Материальная точка М массой m движется прямолинейно по горизонтальной плоскости по закону  под действием силы
под действием силы  (рис.1).
(рис.1).

Определить работу этой силы при перемещении точки ее приложения из первоначального положения  в положение, где
в положение, где 
Решение. Сила, действующая на материальную точку М, меняется с изменением времени. Итак, для определения работы этой силы необходимо воспользоваться уравнением (Д5.8):

где  проекция силы на элементарное перемещение точки приложения силы.
проекция силы на элементарное перемещение точки приложения силы.
В нашем случае заданная сила  совпадает по направлению с перемещением точки М, а работу А необходимо вычислять на перемещении от
совпадает по направлению с перемещением точки М, а работу А необходимо вычислять на перемещении от  до
до 
Таким образом, уравнение (1) имеет вид:

Найдем зависимость между силой F и перемещением S, исключив параметр t, входящий в выражения для значение силы и перемещения:

Подставив новое выражение для силы F в уравнение (2), получим:

Вычислим этот определенный интеграл:

Ответ: 
Задача 4
На рис. 1 изображен поднимающий механизм лебедки. Груз А весом 
поднимается с помощью невесомого и нерастяжимого троса, который переброшен через блок С и намотан на барабан В радиусом r и весом  К барабану приложенный вращающий момент, который является пропорциональным квадрату угла поворота
К барабану приложенный вращающий момент, который является пропорциональным квадрату угла поворота  барабана:
барабана:

где  постоянный коэффициент.
постоянный коэффициент.
Определить скорость груза А в момент, когда он поднимется на высоту h. Массу барабана В считать равномерно распределенной вдоль его обода. Блок С — сплошной
диск весом  В начальный момент система находилась в покое.
В начальный момент система находилась в покое.

Решение. Изобразим на рисунке все внешние силы, которые действуют на барабан В, блок С и груз А: силы притяжения  вращающий момент
вращающий момент  а также реакции шарниров
а также реакции шарниров  и
и  Внутренняя сила — натяжение троса T.
Внутренняя сила — натяжение троса T.
Запишем теорему об изменении кинетической энергии системы (Д5.16):

 кинетическая энергия системы в конечном положении;
кинетическая энергия системы в конечном положении;
 кинетическая энергия системы в начальном положении;
кинетическая энергия системы в начальном положении;
 сумма работ всех внешних сил на перемещении h;
сумма работ всех внешних сил на перемещении h;
 сумма работ всех внутренних сил на перемещении h.
сумма работ всех внутренних сил на перемещении h.
Поскольку в начальный момент времени система находилась в состоянии покоя, то

В связи с тем, что трос не растягивается и при движении системы находится в натянутом состоянии, сумма работ внутренних сил системы равна нулю, следовательно

При поднятии груза А на высоту h сумма работ равна:

Поскольку точки приложения сил  и
и  неподвижные, то
неподвижные, то

Работа силы  равняется:
равняется:

Поскольку вращающийся момент является переменным, то его работа определится путем интегрирования (Д5.13):

Определим угол  на который повернулся барабан В при поднимании груза А на высоту h:
на который повернулся барабан В при поднимании груза А на высоту h:

Итак,

Таким образом

Перейдем к подсчету кинетической энергии системы в конечном положении:

где  кинетическая энергия груза А;
кинетическая энергия груза А;
 кинетическая энергия С;
кинетическая энергия С;
 кинетическая энергия барабана В.
кинетическая энергия барабана В.
Груз А движется поступательно и его кинетическая энергия равна (Д5.3):

Диск С осуществляет вращательное движение, его кинетическая энергия определяется из выражения (Д5.4):

где  момент инерции диска относительно оси вращения;
момент инерции диска относительно оси вращения;
 угловая скорость диска.
угловая скорость диска.
Поскольку диск C сплошной,  равняется:
равняется:

где  радиус диска.
радиус диска.
Поскольку линейная скорость обода диска равна скорости груза, угловая скорость вращения  будет:
будет:

Итак,

Кинетическая энергия барабана В, поскольку он осуществляет вращательное движение, которое равно:

Поскольку масса барабана В распределена по ободу, то:

Угловую скорость барабана вычтем из условия равенства линейных скоростей на ободах диска и барабана:

Отсюда

Таким образом

Кинетическая энергия системы в конечном положении равна:

Итак, теорема про изменение кинетической энергии системы (1) имеет вид:

Решая это уравнение относительно  находим скорость груза
находим скорость груза  , после того, как он пройдет путь
, после того, как он пройдет путь 

Ответ: 
Задания темы Д5
Механическая система, схема которой показана на рис. Д5.1, а исходные данные приведены в таблице Д5, состоит: с четырех тел массами: 
груза 1; двоих ступенчатых шкивов 2 и 3, радиусы степеней которых  и радиусы инерции относительно оси вращения
и радиусы инерции относительно оси вращения  (или ступенчатого шкива 2 и подвижного блока 3 радиусом
(или ступенчатого шкива 2 и подвижного блока 3 радиусом  и радиусом инерции
и радиусом инерции  ); груза 4 (или сплошного однородного цилиндрического катка 4 радиусом
); груза 4 (или сплошного однородного цилиндрического катка 4 радиусом  ). Тела системы соединены друг с другом нитками, которые переброшены через блоки и намотаны на шкивы 2 и 3 и каток 4 (или только на шкив 2). Участки нитей параллельны соответствующим плоскостям.
). Тела системы соединены друг с другом нитками, которые переброшены через блоки и намотаны на шкивы 2 и 3 и каток 4 (или только на шкив 2). Участки нитей параллельны соответствующим плоскостям.
Под действием силы  которая зависит от перемещения
которая зависит от перемещения  точки ее приложения, система приходит в движение из состояния покоя. Во время движения на шкивы 2 и 3 (или только на шкив 2) действуют постоянные моменты
точки ее приложения, система приходит в движение из состояния покоя. Во время движения на шкивы 2 и 3 (или только на шкив 2) действуют постоянные моменты  и
и  (или только
(или только  ) сил трения подшипников, а на каток 4 — момент
) сил трения подшипников, а на каток 4 — момент  пары сил сопротивления качению. Коэффициент трения качения
пары сил сопротивления качению. Коэффициент трения качения  Коэффициент трения скольжения
Коэффициент трения скольжения 
Определить значения скорости, которая приведена в таблице, в тот момент времени, когда тело 1 переместится на расстояние 


Указания. Задача Д5- на использование теоремы о изменении кинетической энергии механической системы. Учтите, что все скорости, которые входят в выражения для кинетической энергии системы, необходимо выразить через ту скорость
(линейную или угловую), которую в задаче надо определить.
При вычислении кинетической энергии тела, которое движется плоскопараллельно, для установления зависимости между скоростями разных точек тела или между их угловой
скоростью и скоростью центра масс надо воспользоваться мгновенным центром скоростей. Кроме того, при вычислении работ внешних сил и моментов сил надо все перемещения выразить через заданное перемещение  учитывая, что зависимость между перемещениями будет такой же, как между соответствующими скоростями.
учитывая, что зависимость между перемещениями будет такой же, как между соответствующими скоростями.
Пример решения темы Д5

Определить: скорость  центра катка 4.
центра катка 4.
Решение. Рассмотрим движение неизменно механической системы (рис.Д5.2)

Изобразим внешние силы и моменты сил сопротивления движению, которые действуют на тело системы:  силы тяжести;
силы тяжести;  реакции связей;
реакции связей;  и
и  — силы трения скольжения тел 1 и 4;
— силы трения скольжения тел 1 и 4;  и
и  моменты сил трения подшипников шкивов 2 и 3 ;
моменты сил трения подшипников шкивов 2 и 3 ;  момент пары сил сопротивления качению катка 4.
момент пары сил сопротивления качению катка 4.
Для определения  воспользуемся теоремой про изменение кинетической энергии механической системы (Д5.16):
воспользуемся теоремой про изменение кинетической энергии механической системы (Д5.16):

где  и
и  кинетические энергии системы в начальном и конечном положениях;
кинетические энергии системы в начальном и конечном положениях;
 сумма работ внешних сил, приложенных до тел системы на ее перемещении из первоначального положения до конечного;
сумма работ внешних сил, приложенных до тел системы на ее перемещении из первоначального положения до конечного;
 сумма работ внутренних сил на том же перемещении.
сумма работ внутренних сил на том же перемещении.
Поскольку в начальном положении система находится в состоянии покоя, то  Поскольку система неизменна, то
Поскольку система неизменна, то  Таким образом, уравнение (1) принимает вид:
Таким образом, уравнение (1) принимает вид:

Величина T равняется сумме кинетических энергий всех тел системы:

Запишем выражения для  учитывая, что тело 1 движется поступательно, тела 2 и 3 вращаются вокруг неподвижных осей, а тело 4 осуществляет плоскопараллельное движение:
учитывая, что тело 1 движется поступательно, тела 2 и 3 вращаются вокруг неподвижных осей, а тело 4 осуществляет плоскопараллельное движение:


Все скорости, которые входят в уравнение (4)  (7), выразим через неизвестную скорость.
(7), выразим через неизвестную скорость.  Угловая скорость
Угловая скорость  катка 4, мгновенный центр скоростей которого находится в точке
катка 4, мгновенный центр скоростей которого находится в точке  равняется :
равняется :

Тогда

Угловая скорость ступенчатого шкива 3 равняется:

Поскольку 

Тогда

Угловая скорость  ступенчатого шкива 2 равняется:
ступенчатого шкива 2 равняется:

Поскольку

Скорость точки В равняется:

Тогда

Скорость  груза 1 равняется:
груза 1 равняется:

В целом

и окончательно:

Найдем сумму работ внешних сил, которые приложены к телам системы на заданном перемещении:

Учитывая, что 
 поскольку эти силы приложены до неподвижных точек, и
поскольку эти силы приложены до неподвижных точек, и  поскольку эта сила перпендикулярна перемещению точки приложения, уравнение (13) имеет вид:
поскольку эта сила перпендикулярна перемещению точки приложения, уравнение (13) имеет вид:

Работа переменной силы  равняется:
равняется:

Работа силы тяжести 

Робота силы трения 

Робота момента силы трения подшипника шкива 2:

Робота момента силы трения подшипника шкива 3:

Работа силы тяжести 

Работа момента пары сил сопротивления качению катка 4:

Величины  и
и  выразим через заданное перемещение
выразим через заданное перемещение  учитывая, что зависимость между перемещениями, такая же как между соответствующими скоростями.
учитывая, что зависимость между перемещениями, такая же как между соответствующими скоростями.
Из (11) следует  тогда
тогда

Из (10) следует  тогда
тогда

Из (9) следует  тогда
тогда

Из (8) следует  тогда
тогда

Таким образом:

Подставляя  и
и  получим:
получим:

Согласно с (2) приравниваем (12) и (30):

Откуда

Ответ: скорость движения центра масс катка 
Принцип даламбера
Краткие сведения из теории:
Принцип Даламбера является одним из методов решения задач динамики, использование которого позволяет составлять уравнение движения материальной точки и механической системы в форме уравнений статики, которые проще чем уравнение динамики.
Принцип Даламбера для материальной точки
Рассмотрим материальную точку М, которая движется и на которую действуют заданная сила  и реакция связи
и реакция связи  (рис.6.1). Равнодействующая
(рис.6.1). Равнодействующая  сил
сил  и
и  изобразится диагональю параллелограмма и, согласно основному закону динамики, ускорение точки
изобразится диагональю параллелограмма и, согласно основному закону динамики, ускорение точки  будет совпадать по направлению с
будет совпадать по направлению с  итак:
итак:

Добавим к силам  и
и  еще одну силу, которая имеет такой самый модуль, что и
еще одну силу, которая имеет такой самый модуль, что и  то есть ma, но направленная противоположно
то есть ma, но направленная противоположно 
а по модулю: 
Сила, которая по модулю равна произведению массы точки на модуль ее ускорения и направлена противоположно ускорению, называется силой инерции.
Совокупность сил  и м равна нулю, потому что они равны по модулю и противоположны по направлению:
и м равна нулю, потому что они равны по модулю и противоположны по направлению:
 или
или 
Итак, при движении материальной точки в каждый данный момент времени совокупность заданной силы реакции связи
реакции связи  и силы инерции
и силы инерции  удовлетворяет условиям равновесия системы смежных сил.
удовлетворяет условиям равновесия системы смежных сил.
В этом состоит принцип Даламбера для материальной точки, значение которого заключается в том, что при его применении к задачам динамики уравнения движения составляются в форме хорошо известных уравнений равновесия.
При проектировании векторного равенства (Д6.1) на декартовые оси координат, получаем выражения для проекций силы инерции на эти оси:

Проецируя то же векторное равенство на природные оси, получим проекции силы инерции на касательную, нормаль и бинормаль к траектории:

Составляющие силы инерции  и
и  которые направлены по касательной и главной нормали, называются, соответственно, касательной (или тангенциальной) и нормальной (или центробежной) силами инерции.
которые направлены по касательной и главной нормали, называются, соответственно, касательной (или тангенциальной) и нормальной (или центробежной) силами инерции.
Принцип Даламбера для механической системы
Если к каждой точки механической системы. которая движется, условно приложить соответствующую силу инерции, то в любой момент времени активные силы, которые действуют на эту точку, реакции связей и сила инерции образуют уравновешенную систему сил, то есть

где  равнодействующая, активных сил, которые приложены к k-ой точке;
равнодействующая, активных сил, которые приложены к k-ой точке;
 равнодействующая реакций связей, которые наложены на точку;
равнодействующая реакций связей, которые наложены на точку;
 сила инерции, которая приложена до k-ой точки.
сила инерции, которая приложена до k-ой точки.
Из статики известно, что геометрическая сумма сил, которые находятся в равновесии, и сумма их моментов относительно любого центра О равняется нулю, поэтому

где  главный вектор активных сил,
главный вектор активных сил, 
 главный вектор реакций связей,
главный вектор реакций связей, 
 главный вектор сил инерции,
главный вектор сил инерции, 
 главный момент активных сил относительно центра О,
главный момент активных сил относительно центра О, 
 главный момент реакций связей относительно центра О,
главный момент реакций связей относительно центра О,

 главный момент сил инерции точек системы относительно центра О,
главный момент сил инерции точек системы относительно центра О, 
В проекциях на оси декартовой системы координат уравнение (6.6) и (6.7) дают или шесть уравнений для произвольной пространственной системы сил:

или три уравнения для произвольной плоской системы сил (основная форма):

Приведение сил инерции точек твердого тела к простому виду
Как известно, систему сил можно привести к силе, которая равна главному вектору и до пары сил с моментом, который равен главному моменту всех сил системы.
Приведение сил инерции точек твердого тела дает следующие результаты.
1. При поступательном движении тела силы инерции приводятся к равнодействующей, которая приложена в центре масс С тела. Равнодействующая  равняется по модулю произведению массы тела на ускорение центра масс и направлена противоположно
равняется по модулю произведению массы тела на ускорение центра масс и направлена противоположно
этому ускорению:

2. При вращении тела вокруг проходящей оси через центр масс тела, силы инерции приводятся к одной паре, которая лежит в плоскости, перпендикулярной к оси
вращения тела и имеет момент (рис Д6.2):

где  угловое ускорение тела;
угловое ускорение тела;
 момент инерции тела относительно оси, которая проходит через его центр масс.
момент инерции тела относительно оси, которая проходит через его центр масс.
Направление пары сил является противоположным направлению углового ускорения 

3. При плоском движении силы инерции приводятся к результирующей силы, которая равна  и приложена в центре масс С тела и направлена противоположно ускорению
и приложена в центре масс С тела и направлена противоположно ускорению  центра масс, и к паре сил, которая лежит в плоскости фигуры, направленная противоположно угловому ускорению
центра масс, и к паре сил, которая лежит в плоскости фигуры, направленная противоположно угловому ускорению  тела и имеет момент
тела и имеет момент  (рис. Д6.3):
(рис. Д6.3):

Порядок решения задач на применение принципа Даламбера
Решение задач с помощью принципа Даламбера (метода кинетостатики) рекомендуется выполнять в следующей последовательности:
1. Изобразить на рисунке активные силы, которые приложены к каждой материальной точке;
2. Изобразить реакции связей;
3. Добавить к активным силам и реакциям связей силы инерции материальных точек системы;
4. Выбрать систему координат;
5. Составить уравнение равновесия всех сил;
6. Решив составную систему уравнений, определить величины, которые ищутся.
Примеры решения задач
Задача 1
Груз М весом 1 Н, который подвешен на нитке длиной 30 см в неподвижной точке О, представляет собой конический маятник, то есть описывает круг в горизонтальной плоскости, при этом нитка составляет с вертикалью угол  (Рисс.1).
(Рисс.1).

Определить скорость груза V и натяжение нити Т.
Решение. На груз М действуют сила притяжения  и реакция нити
и реакция нити  Эти силы не уравновешиваются, потому что груз движется, и движение это происходит по криволинейной траектории круга с радиусом АМ и с нормальным ускорением
Эти силы не уравновешиваются, потому что груз движется, и движение это происходит по криволинейной траектории круга с радиусом АМ и с нормальным ускорением  которое равно
которое равно

Подсчитаем силу инерции груза. Сила инерции  направлена по радиусу АМ в
направлена по радиусу АМ в
сторону, противоположную  и равняется по модулю
и равняется по модулю


Свяжем с точкой М естественную систему координат  ось
ось  направим за касательной по направлению вектора скорости
направим за касательной по направлению вектора скорости  ось Mn по нормальности и ось Mb перпендикулярно к плоскости, в которой лежат оси
ось Mn по нормальности и ось Mb перпендикулярно к плоскости, в которой лежат оси  и
и 
Согласно принципу Даламбера геометрическая сумма сил  и
и  равна нулю:
равна нулю:

Спроектируем это векторное уравнение на оси выбранной системы координат:
на ось 
на ось 
на ось 
Со второго уравнения определим натяжение нити 

Из первого уравнения находим скорость  груза:
груза:

Ответ: 
Задача 2
Определить опорные реакции подпятника А и подшипника В поворотного крана (рис. 1) при поднимании груза Е весом 30 кН с ускорением  Вес крана равен 20 кН и приложен в его центре притяжения С. Вес тележки D равен 5 кН . Кран и тележка неподвижны. Размеры показаны на рис. 1.
Вес крана равен 20 кН и приложен в его центре притяжения С. Вес тележки D равен 5 кН . Кран и тележка неподвижны. Размеры показаны на рис. 1.

Решение. На кран действуют силы притяжения крана  тележки
тележки  и груза
и груза  а также реакции опор:
а также реакции опор: 
Для уравновешенной системы сил добавим силу инерции поднимающегося груза Е
с ускорением 
Сила инерции  направлена вертикально вниз и по модулю и равна:
направлена вертикально вниз и по модулю и равна:

Перейдем, согласно методу кинетостатики, к составлению уравнений равновесия крана при наличии активных сил, реакций связей и силы инерции. Уравнение равновесия выглядит так:


Решая эти уравнения, находим неизвестные величины:

Ответ:

Задача 3
Барабан А (рис. 1), весом Р и радиусом r, вращается вокруг горизонтальной оси O в результате опускания тела B, весом Q, которое подвешено к нерастяжимому и невесомому канату, который намотанный на барабан.

Определить угловое ускорение  барабана, считая его однородным сплошным цилиндром, и натяжение N каната.
барабана, считая его однородным сплошным цилиндром, и натяжение N каната.
Решение. На систему действуют внешние (активные) силы: силы тяжести барабана  и тела
и тела  реакция
реакция  в сопротивлении O.
в сопротивлении O.
Данная система сил не является уравновешенной.
Согласно принципу Даламбера, если к активным силам и реакциям связей, которые действуют на систему, добавить силы инерции, то полученная система сил будет уравновешенной и к ней можно применить уравнение равновесия.
Найдем силы инерции, которые надо добавить к телам данной системы.
Тело В движется вниз с некоторым ускорением  величина которого равна тангенциальному ускорению точки С барабана:
величина которого равна тангенциальному ускорению точки С барабана:

Сила инерции  тела в направленна противоположно вектору ускорения
тела в направленна противоположно вектору ускорения  (рис. 1) и по модулю равна:
(рис. 1) и по модулю равна:

Поскольку барабан вращается вокруг оси, которая проходит через его центр масс, то силы инерции барабана сводятся к паре сил с моментом  модуль которого
модуль которого
равняется:

где  момент инерции барабана относительно его оси вращения.
момент инерции барабана относительно его оси вращения.
Учитывая, что барабан представляет собой сплошной диск, то:

Тогда

Направление момента  сил инерции барабана противоположно его угловому ускорению
сил инерции барабана противоположно его угловому ускорению 
Поскольку систему сил после приложения сил инерции можно рассматривать как такую, которая находится в равновесии, то запишем равенство нуля моментов сил относительно оси вращения:

или

Сократив на  и выполнив преобразования, получим:
и выполнив преобразования, получим:

Откуда

Для определения натяжения каната воспользуемся высвобождаемым принципом: разрежем квадрат и покажем активные силы , которые действуют на тело В (рис.2): силу притяжения  и натяжения каната
и натяжения каната 

Согласно с принципом Даламбера добавим к этим силам силу инерции  тела В.
тела В.
Запишем уравнение равновесия всех сил, включая и силу инерции, на вертикаль:
 или
или 
Откуда

Подставим в полученное уравнение выражение для 

Тогда

Ответ:

Задание темы Д6
Вертикальный вал, который закреплен в подпятнике в точке А и в цилиндрическом подшипнике в точке В (рис. Д6.4), вращается с постоянной угловой скоростью
 В точках, которые указаны в таблице Д6 и которые находятся на одинаковом расстоянии
В точках, которые указаны в таблице Д6 и которые находятся на одинаковом расстоянии  друг от друга, к валу жестко прикреплены: перпендикулярно оси вращения маховик в виде сплошного однородного диска массой
друг от друга, к валу жестко прикреплены: перпендикулярно оси вращения маховик в виде сплошного однородного диска массой  при этом плоскость рисунка является плоскостью его материальной симметрии, а его центр масс С смещен от оси вала на расстояние
при этом плоскость рисунка является плоскостью его материальной симметрии, а его центр масс С смещен от оси вала на расстояние  и тонкий однородный прямолинейный стержень длиной l и массой
и тонкий однородный прямолинейный стержень длиной l и массой  который расположен в плоскости рисунка под углом
который расположен в плоскости рисунка под углом  к оси вала (табл. д6).
к оси вала (табл. д6).
Пренебрегая весом вала, определить реакции подпятника и подшипника, а также вычислить во сколько раз радиальные динамические составляющие реакций отличаются
от статических. При расчетах принять ускорение свободного падения 
Указания. Задача Д6 -на использование принципа Даламбера к изучению движения материальной системы. Следует помнить, что силы инерции направлены противоположно соответствующим ускорениям, и поскольку по условию задачи  и
и  то учитывать следует только центробежные силы инерции элементов маховика и стержня. Кроме того, если силы инерции долей тела имеют равнодействующую
то учитывать следует только центробежные силы инерции элементов маховика и стержня. Кроме того, если силы инерции долей тела имеют равнодействующую  то ее модуль,
то ее модуль,
 где
где  ускорения центра масс С стержня, но при этом линия действия силы
ускорения центра масс С стержня, но при этом линия действия силы  в общем случая не проходит через точку С.
в общем случая не проходит через точку С.


Пример решения темы Д6

Определить: 
Решение. Согласно данным изображаем вал, который закреплен подпятником в точке A и подшипником в точке B (рис.Д6.2).

К валу жестко прикреплены: в точке K перпендикулярно оси вращения маховик, центр масс  которого смещен от оси вала на расстояние
которого смещен от оси вала на расстояние  в точке D под углом
в точке D под углом  до вертикали прямолинейный стержень длиной l. Для определения неизвестных реакций рассмотрим движение заданной механической системы и применим принцип Даламбера.
до вертикали прямолинейный стержень длиной l. Для определения неизвестных реакций рассмотрим движение заданной механической системы и применим принцип Даламбера.
Выберем систему координат Kxyz, которая будет вращаться вместе с валом, так, чтобы стержень лежал в плоскости  а ось
а ось  прошла через центр масс
прошла через центр масс  диска.
диска.
Покажем активные силы, которые действуют на систему: силы притяжения диска 
и стержня  которые приложены в соответствующих центрах масс
которые приложены в соответствующих центрах масс  и
и  и реакции опор: подпятника А, которую разложим на три составляющие
и реакции опор: подпятника А, которую разложим на три составляющие и цилиндрического шарнира В, которую разложим на две составляющие
и цилиндрического шарнира В, которую разложим на две составляющие 

Силы притяжения равны по величине:

Согласно принципу Даламбера, присоединим к этим силам центробежные силы инерции элементов диска и стержня.
Для каждого элемента диска массой  инерции
инерции  расположена в плоскости
расположена в плоскости  и имеет направление от точки К диска, поскольку угловое ускорение вала по
и имеет направление от точки К диска, поскольку угловое ускорение вала по
условию задачи равняется нулю 
Эти силы, которые совпадают в точке K, могут быть заменены равнодействующей,  которая направлена в следствии симметрии вдоль оси Ky.
которая направлена в следствии симметрии вдоль оси Ky.
Поскольку угловое ускорение диска равно нулю, то главный момент сил инерции элементов диска тоже равняется нулю.
Таким образом, система сил инерции элементов диска сводится к одной равнодействующей  которая приложена в точке К и направлена вдоль оси
которая приложена в точке К и направлена вдоль оси  и равна по величине:
и равна по величине:

Поскольку вектор силы можно переносить вдоль его линии действия, то будем считать, что сила  приложена в центре масс диска, то есть в точке
приложена в центре масс диска, то есть в точке 
Для каждого элемента стержня массой  сила инерции
сила инерции  лежит в плоскости
лежит в плоскости  параллельно оси
параллельно оси  направленная от оси вращения и многочисленно равна
направленная от оси вращения и многочисленно равна

где  расстояние k -ого элемента от оси вращения.
расстояние k -ого элемента от оси вращения.
Поскольку все элементарные силы  пропорциональные
пропорциональные  то эпюры этих параллельных сил инерции стержня образуют треугольник (рис. Д6.5). Итак, их равнодействующая
то эпюры этих параллельных сил инерции стержня образуют треугольник (рис. Д6.5). Итак, их равнодействующая  проходит через центр притяжения треугольника, то есть на расстоянии
проходит через центр притяжения треугольника, то есть на расстоянии  от вершины D треугольника, где:
от вершины D треугольника, где:

Модуль этой равнодействующей равен главному вектору сил инерции стержня:

Поскольку силы  и
и  лежат в одной плоскости
лежат в одной плоскости  то реакции подпятника А и подшипника В лежат в той же плоскости, то есть имеют составляющие
то реакции подпятника А и подшипника В лежат в той же плоскости, то есть имеют составляющие  в точке А и
в точке А и  в точке В.
в точке В.
Согласно принципу Даламбера внешние силы и силы инерции, которые приложены к системе, образуют уравновешенную систему сил. Составим для этой плоской системы
три уравнения равновесия:

В уравнении (7) плечи и
и  соответствующих сил относительно точки А, которые равны:
соответствующих сил относительно точки А, которые равны:


Выразив из уравнений (5) (7) неизвестные реакции и подставив в полученные уравнения соответствующие величины из (1), (2), (4) найдем составляющие реакций связей:
из (7) следует

Из (6) следует

Из (5) следует

Тогда полные реакции:

Чтобы определить статические реакции подшипника и подпятника следует в уравнениях равновесия (5)  (7) исключить слагаемые, которые содержат силы инерции.
(7) исключить слагаемые, которые содержат силы инерции.
Тогда уравнения (5)  (7) приобретут вид:
(7) приобретут вид:


Из (10) следует

Из (9) следует

Из (9) следует

Впрочем, вычислим во сколько раз радиальные динамические составляющие реакции подшипников больше, чем статические

Таким образом, радиальные динамические нагрузки на подшипники, которые возникают благодаря силам инерции, могут быть значительно больше, чем статические нагрузки,
что необходимо учитывать при конструировании машин и механизмов.
Ответ: реакция подпятника 

реакция подшипника 

Дополнительные лекции и примеры по теме «Динамика»
Законы динамики, уравнения движения материальной точки. принцип даламбера
Динамикой называется раздел механики, в котором изучается движение материальных тел под действием приложенных к ним сил. В основе динамики лежат законы, сформулированные Ньютоном.
Первый закон — закон инерции, установленный Галилеем, гласит:
материальная точка сохраняет состояние покоя или равномерного прямолинейного движения» пока воздействие других тел не изменит это состояние.
Второй закон — основной закон динамики — устанавливает связь между ускорением  массой
массой  материальной точки
материальной точки  и силой
и силой  (рис. 1.51, а): ускорение материальной точки пропорционально приложенной к ней силе и имеет одинаковое с ней направление.
(рис. 1.51, а): ускорение материальной точки пропорционально приложенной к ней силе и имеет одинаковое с ней направление.
Запишем этот закон в форме, которую придал ему Эйлер:

В классической механике масса т принята за постоянную величину. Масса является мерой инертности материальных тел в их поступательном движении. Запишем основной закон динамики в скалярном виде, проецируя векторные величины, входящие в равенство* на оси координат:

Третий закон формулируется следующим образом: всякому действию соответствует равное и противоположно направленное противодействие.
Этот закон устанавливает, что при взаимодействии двух тел, в каком бы кинематическом состоянии они не находились, силы, приложенные к каждому из них, равны по модулю и направлены по одной прямой в противоположные стороны.

Четвертый закон не был сформулирован Ньютоном как отдельный закон механики, но таковым можно считать сделанное им обобщение правила параллелограмма сил:
- несколько одновременно действующих сил сообщают точке такое ускорение, какое сообщала бы одна сила, равная их геометрической сумме.
Основной закон динамики можно записать в скалярном виде, спроецировав векторы либо на декартовы, либо на естественные оси координат. В первом случае получим уравнения движения материальной точки в прямоугольной декартовой системе координат:

где 
Во втором случае получим естественные уравнения движения:

где 
Проекция ускорения на бинормаль всегда равна нулю  поэтому
поэтому 
Пример решения задачи 1.14
Уравнения движения материальной точки  массой
массой  имеют вид
имеют вид

Определить равнодействующую приложенных к материальной точке сил и траекторию ее движения.
Решение.
1. Определяем проекции ускорения на оси координат. Для этого сначала определим проекции скорости на те же оси:

2. Определяем проекции равнодействующей силы. Поскольку 
 и
и  то
то

3. Определяем модуль равнодействующей:

4. Определяем направление равнодействующей:

Очевидно, что угол наклона равнодействующей силы по отношению к осям координат меняется.
5. Определяем траекторию движения материальной точки. Для исключения переменной  возведем в квадрат и сложим уравнения движения. В результате получим уравнение окружности с радиусом
возведем в квадрат и сложим уравнения движения. В результате получим уравнение окружности с радиусом 
Из полученного решения можно сделать следующий вывод: материальная точка движется по окружности радиусом г под воздействием приложенной к ней силы, которая все время направлена к центру этой окружности.
Принцип ДАламбера
Принципом Д’Аламбера называют общий метод, с помощью которого уравнениям динамики придается вид уравнений статики. Для этого вводится понятие «сила инерции материальной точки» — сила, равная произведению массы точки на ее ускорение и направленная противоположно ускорению:

Положим, что материальная точка  под действием системы сил
под действием системы сил  движется с ускорением
движется с ускорением  (рис. 1.51, б), в этом случае основное уравнение динамики будет иметь вид
(рис. 1.51, б), в этом случае основное уравнение динамики будет иметь вид

Перенесем член  из левой части уравнения в правую. Тогда
из левой части уравнения в правую. Тогда

Так как  то
то

Полученное соотношение выражает принцип Д’Аламбера и формулируется следующим образом;
- геометрическая сумма всех приложенных к точке сил и силы инерции этой точки равна нулю.
Принцип Д’Аламбера применим как для свободной, так и для несвободной материальной точки, так как, освобождая материальную точку от связей и заменяя их действие пассивными силами, мы рассматриваем движение точки под действием активных и пассивных сил, которые сообщают ей ускорение.
Следует помнить, что к материальной точке инерционная сила приложена лишь условно. Фактически сила инерции приложена не к материальной точке, а к телу, сообщающему ей ускорение.
Этот метод получил широкое применение при расчетах на прочность при динамических нагрузках (см. пример 2.18 в главе 2).
Силу инерции можно разложить на касательную  (тангенциальную) и нормальную
(тангенциальную) и нормальную  (центробежную) составляющие (рис. 1.51, в)
(центробежную) составляющие (рис. 1.51, в)

где  — радиус кривизны траектории.
— радиус кривизны траектории.
В случае круговой траектории точки (радиус окружности  ), принадлежащей телу, вращающемуся с угловой скоростью
), принадлежащей телу, вращающемуся с угловой скоростью  и угловым ускорением
и угловым ускорением  тангенциальная и центробежная составляющие силы инерции имеют вид
тангенциальная и центробежная составляющие силы инерции имеют вид

Силы, действующие на точки механической системы
еханической системой называют мысленно выделенную совокупность материальных точек, взаимодействующих между собой. Механическую систему иногда называют материальной системой или системой материальных точек. Существуют системы свободных (например, Солнечная система) и несвободных материальных точек (их движения ограничены связями). Примером системы несвободных точек может служить любой механизм или машина, Все силы, действующие на систему несвободных точек, подразделяют на задаваемые (активные) силы и реакции связей (пассивные силы).
По другому признаку силы, действующие на точки любой механической системы, делят на внешние и внутренние. Условимся обозначать внешние силы  а внутренние силы
а внутренние силы 
Внешними называют силы, действующие на точки системы со стороны материальных точек, не входящих в состав данной системы.
Внутренними силами называются силы взаимодействия между материальными точками данной механической системы. Примером внутренних сил могут служить силы упругости, действующие между частицами упругого тела, принятого за механическую систему.
Одна и та же сила может быть как внешней, так и внутренней в зависимости от того, какая механическая система рассматривается. Например, реакции подшипников вала являются внешними силами по отношению к валу. Эти же реакции можно отнести к внутренним силам, если рассматривать всю установку вместе с машиной.
Таким образом, любая сила может быть внешней или внутренней, в то же время она может быть задаваемой или реакцией связи. Движение точек системы зависит как от внешних, так и от внутренних сил.
По закону равенства действия и противодействия каждой внутренней силе соответствует другая внутренняя сила, равная ей по модулю и противоположная по направлению. На основании этого можно сделать следующие выводы.
1. Главный вектор всех внутренних сил системы равен нулю:

Следовательно, и суммы их проекций на координатные оси также равны нулю:

2. Главный вектор-момент всех внутренних сил системы относительно любого центра и координатных осей равен нулю:

или

Эти уравнения имеют вид уравнений равновесия сил, произвольно приложенных в пространстве, однако в них входят внутренние силы, которые не уравновешиваются, так как они приложены к разным точкам системы и могут вызвать перемещение этих точек относительно друг друга.
Теорема о движении центра масс механической системы
Представим, что механическая система массой  состоит из
состоит из  материальных точек (рис. 1.52). Известно (см. подразд. 1.6), что можно найти положение центра масс такой системы, если заданы массы
материальных точек (рис. 1.52). Известно (см. подразд. 1.6), что можно найти положение центра масс такой системы, если заданы массы  точек и их координаты:
точек и их координаты:

или 
Дважды продифференцировав эти равенства, получим

Правые части полученных уравнений в соответствии с основным законом^намики представляют собой сумму внешних  и внутренних
и внутренних  сил, действующих на эти материальные точки, в проекциях на соответствующие оси координат. Следовательно, последние уравнения можно переписать так:
сил, действующих на эти материальные точки, в проекциях на соответствующие оси координат. Следовательно, последние уравнения можно переписать так:


Учитывая, что главный вектор внутренних сил равен нулю  получим
получим

Эти уравнения выражают теорему о движении центра масс системы, которая формулируется следующим образом.
Центр масс механической системы движется как материальная точка с массой, равной массе системы, к которой приложены все внешние силы, действующие на эту систему.
Отсюда следует, что внутренние силы не оказывают влияния на движение центра масс механической системы.
Пример решения задачи 1.15.
Определить перемещение плавучего крана, поднимающего груз массой  при повороте стрелы крана до вертикального положения (рис. 1.53). Масса крана
при повороте стрелы крана до вертикального положения (рис. 1.53). Масса крана  Длина стрелы
Длина стрелы  равна
равна  Сопротивлением воды пренебречь.
Сопротивлением воды пренебречь.
Решение.
1. Выбираем систему отсчета (рис. 1.53, а).

2. Проставляем все внешние силы, действующие на материальные Теда данной механической системы. На плавучий кран действуют сила тяжести  (заданная сила) и сила
(заданная сила) и сила  (реакция, т.е. пассивная сила}; к грузу приложена только одна внешняя сила — его вес
(реакция, т.е. пассивная сила}; к грузу приложена только одна внешняя сила — его вес 
3. Запишем уравнения движения центра масс механической системы

или

4. Будем исследовать первое уравнение, так как нас интересует движение центра масс по горизонтали. Поскольку  то скорость центра масс вдоль оси
то скорость центра масс вдоль оси  Это означает, что скорость центра масс в этом направлении в любой момент времени неизменна, т.е. справедливо равенство
Это означает, что скорость центра масс в этом направлении в любой момент времени неизменна, т.е. справедливо равенство 
В начальный момент система находилась в покое, следовательно, 
 А так как
А так как  то
то 
Таким образом, анализ уравнения движения центра масс вдоль оси  показал, что начальная и конечная координаты центра масс совпадают:
показал, что начальная и конечная координаты центра масс совпадают: 
5. Запишем формулы для определения начального и конечного положений центра масс механической системы:

6. Выразим начальные и конечные координаты материальных тел системы в соответствии с выбранной системой отсчета (см. рис. 1.53, а и б):

7. Определяем перемещение  плавучего крана. Приравнивая
плавучего крана. Приравнивая 
 получим
получим

или


Ответ: 
Краткие исторические сведения о динамике
Законы движения тел всегда интересовали человека. Познание их было медленным и не всегда удачным. Например, Аристотель (384-322 pp. До н. С.) считал, что с прекращением действия силы, тела перестают двигаться. Только в результате длительных наблюдений над движениями, происходящими в природе, были правильно сформулированы законы движения.
Разработка основ динамики относится к  в., когда общественная практика (особенно судоходство и военное дело) поставила перед учеными ряд важнейших проблем.
в., когда общественная практика (особенно судоходство и военное дело) поставила перед учеными ряд важнейших проблем.
Важную роль в развитии динамики сыграло открытие Н. Коперником (1473-1543) гелиоцентрической системы, согласно которой Земля и другие планеты вращаются вокруг Солнца. До Коперника общепринятой считалась геоцентрическая система мира К. Птолемея ( ст. н. с.).
ст. н. с.).
В исследованиях по небесной механике И. Кеплер (1571-1630) обобщил учение Коперника. Он установил, что орбиты планет являются не кругами, а эллипсами с незначительным эксцентриситетом. Пользуясь наблюдениям Тихо Браге (1546- 1601) над движением планет, Кеплер открыл законы их движения. Подготовительный период в развитии динамики связан с именами Леонардо да Винчи (1452- 1519), Г. Галилея (1564 1642), Р. Декарта (1596- 1650) и X. Гюйгенса (1629 1695).
Леонардо да Винчи принадлежит ряд исследований движения тела по наклонной плоскости, теории механизмов, движения воды в трубах и тому подобное. Он впервые сформулировал закон инерции. Интересно, что более поздние исследования Г. Галилея по закону инерции являются менее прогрессивными по сравнению с аналогичными исследованиями Леонардо да Винчи, поскольку Галилей ошибался, когда под движением по инерции понимал равномерное движение по кругу, а не по прямой линии.
Г. Галилей экспериментально доказал закон падения тел в пустоте, исследовав движение снаряда без учета сил сопротивления, установил закон пропорциональности между весом тела и его массой, впервые сформулировал принцип относительности классической динамики, а также исследовал движение математического маятника.
Р. Декарт проводил систематические опыты над движением тел, сталкивающихся и ввел понятие о количестве движения, как о мере механического движения, открыв закон сохранения количества движения, Декарт неправильно рассматривал его как универсальный закон природы: он считал количество движения величиной скалярной. Однако, несмотря на эту ошибку, идея Декарта оказалась плодотворной и сыграла в развитии динамики большую роль.
X. Гюйгенс решил ряд задач о движении простого и сложного физических маятников, об определении центра колебаний физического маятника. Он впервые использовал в динамике выражения для осевых моментов инерции материальной системы, а также кинетической энергии, но не называл их этими терминами. В дальнейшем Г. Лейбниц (1646-1716) развил вопрос о мерах механического движения. Между сторонниками Декарта и Лейбница возникла дискуссия о настоящей мере механического движения, которая закончилась в конце XIX в. Правильно с диалектико-материалистических позиций осветил историю этой дискуссии и раскрыл методологическую сущность вопроса о мерах механического движения Ф. Энгельс в своем труде «Диалектика природы».
Основателем динамики как целостной науки является И. Ньютон (1643 1727). Он систематизировал и обобщил исследования, связанные с динамикой, и показал пути дальнейшего развития. Он впервые сформулировал основные законы динамики, известные в современной литературе как первый, второй и третий законы Ньютона, ввел понятие массы и обобщил понятие силы. Ему принадлежит открытие общего закона природы — закона всемирного тяготения, который лежит в основе современной механики и физики. Пользуясь этим законом, он решил ряд задач теоретической и небесной механики. Главное произведение Ньютона, в котором подано четкое и систематическое изложение классической механики, называется «Математические начала натуральной философии «.Это произведение написано на латинском языке и впервые издано в 1687 г. На русский язык ее перевел А. Н. Крылов, сделал многочисленные примечания (см .: Крылов А. Н. Собрание трудов, изд-во АН СССР, 1936). Будучи одним из основателей математического анализа, Ньютон вместе с тем изложил механику синтетически. Впервые аналитически динамику изложил Л. Эйлер (1707-1783) — академик Петербургской Академии наук. Он впервые доказал одну из основных теорем динамики — теорему об изменении кинетического момента; построил теорию моментов инерции; ввел понятие потенциального силового поля и открыл один из общих принципов механики, названный его именем. Заслуги Эйлера в небесной механике, применении механики в технике (кораблестроении, турбостроении и т.д.), механике сплошных сред, теории устойчивости чрезвычайно велики. Современник Эйлера Н. В. Ломоносов (1711-1765) как энциклопедист не мог не заинтересоваться механикой, как основой естествознания в целом. Ему принадлежит открытие общего закона природы — закона сохранения материи и движения. Все законы сохранения механики и физики (закон сохранения количества движения, закон сохранения и преобразования энергии и др.) является конкретными частными случаями закона Ломоносова. Утверждая несотворимость и неуничтожимость материи и движения, способность движущейся материи в различных преобразованиям, рассматривая материю в органической связи с движением, общий закон Ломоносова и все его конкретные модификации в различных отраслях физики и естествознания являются доказательством единства мира и всеобщности движения, являясь, таким образом, естественнонаучной основой материализма.
Исследования Л. Эйлера по динамике твердого тела получили дальнейшее развитие в трудах Ж. Лагранжа, Л. Пуансот (1777-1859) и С. В. Ковалевской (1850-1891). Результаты исследований С. В. Ковалевской стали импульсом к появлению в области динамики твердого тела и ее технических приложений целого ряда научных исследований отечественных и зарубежных ученых, среди которых А.Н. Ляпунов (1857- 1918), Н Б. Делоне (1856-193I) М. Е. Жуковский (1847-1921), С. А. Чаплыгин (1869-1942). Сегодня исследования по динамике твердого тела развивают П. В. Харламов, В. Г. Демин и ряд других исследований по динамике твердого тела связан с развитием теории гироскопов и инерциальной навигации. К этому направлению относятся исследования Шулера, О.М. Крылова (1863-1945), Б. В. Булгакова (1901-1952), В. А, Павлова, Г. Магнуса, Д С. Пельпора, А. Ю. Ишлинского , Д. М. Климова, В. М. Смеляков, А. П. Бойчука, Ю. А. Карпачева и др. В конце XIX в. зародилась механика тел переменной массы, основателем которой является И. В. Мещерский (1859 1935). Этот раздел механики стал основой теории реактивного движения и межпланетных полетов, которую создал К. Э. Циолковский (1857-1935). Он получил дальнейшее развитие и практического воплощения в трудах создателя ракетной и космической техники С.П. Королева (1907-1966). В конце XX в. Украина стала мировым лидером в ракетостроении, которое возглавил С. И. Конюхов (Днепропетровск). В XX в. было установлено, что при скоростях, близких к скорости света (300 000 км / с), формулы классической механики приводят к существенных погрешностей. В этом случае нужно применять механику больших скоростей — релятивистскую механику.
Во второй половине XX в. появилось новое направление науки — робототехника, основой которого стала теоретическая механика. Особенностью робототехники является то, что она синтезирует и объединяет такие науки, как механика, кибернетика и компьютерные технологии. Большой вклад в развитие этого направления внесли: К. В. Фролов, Е. И. Воробьев, А. Г. Овакимов, Ф. Л. Черноусько, Р. Уикер, М. Вулкобратович, В. Б Ларин, В. И. Костюк, М. 3. Згуровскин и др. XX века можно назвать еще и веком механики нелинейных колебаний. Особый вклад в развитие теории нелинейных колебаний принадлежит украинским ученым Н. Н. Боголюбову, Ю. А. Митропольському, В. А. Кононенко и др.
Динамика и ее основные задачи
Динамикой называется раздел теоретической механики, в котором изучается механическое движение материальной точки, системы материальных точек и абсолютно твердого тела с учетом сил, действующих на эти подвижные объекты. В динамике синтезируются и обобщаются положения, рассмотренные в статике и кинематике, а также устанавливаются наиболее общие законы механического движения. При этом учитывается взаимодействие между телами, мерой которых является сила. Статическое измерение силы основывается на уравновешивании ее другой силой. С помощью динамометра сила, действующая на тело, определяется уравновешенной силой упругости пружины.
В динамике среди основных рассматриваются две задачи. Первая из них (прямая задача динамики) заключается в том, что по заданным механическим движениям и массой тела определяют силы, под действием которых осуществляются это движение. Вторая задача (обратная задача динамики) заключается в том, что по заданным силами, приложенными к телу, его массой и начальными условиями определяют движение которое они вызывают.
Конечно динамику принято делить на динамику материальной точки, динамику системы материальных точек и динамику твердого тела. В этом учебнике много положений и
теорем для точки и системы излагаются параллельно.
Законы Ньютона
В основе динамики лежат законы Ньютона, изложенные в «Математических началах
натуральной философии «.
Законы Ньютона являются объективными законами природы, установленными на основе
многочисленных опытов и наблюдений Ньютона и его предшественников. Эти законы истинные настолько, насколько выводы, вытекающие из них, согласуются с опытом в
пределах точности наблюдений. Системы координат, в которых справедливы
законы Ньютона, называются инерциальными. Инерциальными (Галилея) являются системы координат, движущихся поступательно, прямолинейно и равномерно относительно неподвижных звезд. С достаточной точностью инерциальной (основной) можно считать гелиоцентрическую систему координат при изучении движений со скоростями, малыми по сравнению со скоростью света. При решении многих задач по технике, основную систему координат (систему отсчета) связывают с Землей. При решении задач по астрономии, навигации и управления подвижными объектами, где приходится учитывать вращение Земли, за основную систему отсчета берут систему координат, связанную со звездами, то есть инерциальную систему координат.
Первый закон Ньютона (закон инерции)
Изолированная материальная точка сохраняет состояние покоя или равномерного и прямолинейного движения до тех пор; пока влияние со стороны других тел не выведет ее из этого состояния:
Изолированной называется материальная точка, взаимодействием которой с окружающими телами пренебрегают. Свойство изолированной материальной точки сохранять состояние равномерного и прямолинейного движения называется свойством инертности.
Из закона инерции следует, что спонтанное изменение движения материальной точки невозможно.
Движение материальной точки может измениться только в результате ее взаимодействия с другими телами. Мерой этих взаимодействий являются силы. Глубокий анализ внутреннего содержания понятия о механической силе сделал Ф. Энгельс. Введение понятия силы позволило установить связь между механическими и сложными немеханическими формами движения материи. Например, если рассматривать силу взаимодействия наэлектризованных частиц, то здесь оказывается связь между механическим движением и
более сложной формой движения, которое изучается в теории электричества. Величину и направление действия силы по наблюдаемым отклонениями движения материальной
точки от равномерного и прямолинейного движения подает второй закон Ньютона.
Второй закон Ньютона (основной закон динамики)
Скорость изменения количества
движения материальной точки равна силе, действующей на эту точку.
Математически этот закон выражается равенством:
 (13.1)
(13.1)
где  — количество движения материальной точки,
— количество движения материальной точки,  — масса точки.
— масса точки.
В классической механике рассматривают движение со скоростями, малыми по сравнению со скоростями света. При движении с большими скоростями, согласно формуле Лоренца,
масса будет зависеть от скорости движения:
 (13.2)
(13.2)
где  — масса неподвижного объекта,
— масса неподвижного объекта,  — скорость движения,
— скорость движения,  — скорость света.
— скорость света.
При малых скоростях  относительно тел постоянного состава, имеем:
относительно тел постоянного состава, имеем:

Считая,  выражение (13.1) перепишем в виде:
выражение (13.1) перепишем в виде:
 (13.3)
(13.3)
где  — ускорение точки.
— ускорение точки.
На основе (13.3) второй закон Ньютона можно сформулировать так: ускорение материальной точки пропорционально приложенной к ней силе и имеет одинаковые с ней направление.
Отметим, что такая формулировка второго закона Ньютона непригодна в динамике тела переменной массы. Если бы Ньютон сформулировал этот закон в форме (13.3) (а именно она применяется в большинстве учебников по общей физике), то была бы невозможной теория реактивного движения.
Уравнение (13.3) называется основным уравнением динамики свободной материальной
точки, или уравнением Ньютона. Второй закон Ньютона выражает количественное соотношение между тремя физическими величинами: силой, массой и ускорением. Понятие силы встречалось еще в статике, понятие ускорения — в кинематике. Массой материальной точки называется физическая величина, которая является мерой ее инертных и
гравитационных свойств.
Из физики известно, что силу можно измерить с помощью специального прибора —
динамометра, ускорение — одним из способов, указанных в кинематике. Массу можно
определить двумя способами.
Первый способ определения массы основывается на законе всемирного тяготения, согласно с которым сила взаимного притяжения между телами выражается формулой:
 (13.4)
(13.4)
где  — гравитационная сила, которая равна
— гравитационная сила, которая равна 
 — расстояние между телами массами
— расстояние между телами массами  и
и  .
.
Еще Галилей установил, что вблизи земной поверхности при свободном падении все тела
имеют одно и то же ускорение:
 (13.5)
(13.5)
что равно  Следовательно, сила тяготения тела определяется по формуле:
Следовательно, сила тяготения тела определяется по формуле:
 (13.6)
(13.6)
Таким образом, измерив силу притяжения тела с помощью весов, можно по формуле
(13.6) определить его массу. То есть определение массы называется статическим, а
сама масса, определенная этим способом — гравитационной.
Второй способ определения массы состоит в следующем. Пусть одна и та же сила
 , действуя на два различных тела с массами
, действуя на два различных тела с массами  и
и  , вызывает ускорение
, вызывает ускорение  и
и  . Тогда,
. Тогда,
по второму закону Ньютона:
 (13.7)
(13.7)
Отсюда,
 (13.8)
(13.8)
Взяв массу первого тела  за эталон, можно по этой формуле определить массу второго тела. Такой способ определения массы называется динамическим, а сама масса, найденная этим способом — инертной. Экспериментально доказано, что гравитационная и инертная массы численно равны друг другу (в результате опытов Ньютона, Ф. Бесселя, Л. Этвеша равенство гравитационные и инертной масс установлено с точностью до
за эталон, можно по этой формуле определить массу второго тела. Такой способ определения массы называется динамическим, а сама масса, найденная этим способом — инертной. Экспериментально доказано, что гравитационная и инертная массы численно равны друг другу (в результате опытов Ньютона, Ф. Бесселя, Л. Этвеша равенство гравитационные и инертной масс установлено с точностью до  ). Этот факт, который играет большую роль в современной физике, составляет основу общей теории относительности и называется принцип эквивалентности гравитационной и инертной масс. Устанавливая связь между основными характеристиками механического движения, второй закон Ньютона является одним из методов для решение задач механики. С второго закона Ньютона, при обращение в ноль действующей силы, следует закон инерции
). Этот факт, который играет большую роль в современной физике, составляет основу общей теории относительности и называется принцип эквивалентности гравитационной и инертной масс. Устанавливая связь между основными характеристиками механического движения, второй закон Ньютона является одним из методов для решение задач механики. С второго закона Ньютона, при обращение в ноль действующей силы, следует закон инерции 

Это означает, что между первым и вторым законами Ньютона является полное соответствие, и они не включают в себя внутренних логических противоречий.
Третий закон Ньютона (закон равенства действия и противодействия}
Силы взаимодействия двух материальных точек или двух тел (действие и противодействие)
равны по величине, направлены в противоположные стороны и имеют общую линию действия. Если первый и второй законы Ньютона принадлежат к динамике материальной точки, то третий закон Ньютона принадлежит к динамике системы материальных точек или тел. Следует отметить, что действие и противодействие приложены к разным материальных точек или тел, и третий закон Ньютона, в отличие от первых двух, справедливый в любой
системе координат, а не только в инерциальной, он не содержит кинематических характеристик движения материальных объектов. В конце концов, третий закон Ньютона позволяет отличить реальные силы, приложенные к точкам, от фиктивных, которые могут появиться при математическом решении задач механики.
Закон независимости действия сил (принцип суперпозиции}. Ускорение материальной
точки, возникает при одновременном действии на нее нескольких сил, равно векторной сумме ускорений, которые предоставляют точке отдельные силы.
Этот закон следует из аксиомы о параллелограмме сил. Он не пригоден при воздействии на
материальную точку сил, зависящих от ускорение.
Во введении отмечалось, что законы Ньютона, как и все положения теоретической механики, основывается на них, носят ограниченный характер и является лишь первым приближением к действительности, хорошо согласуется с ней только при движениях с малыми скоростями. Эта ограниченность вызывается тем, что в теоретической механике свойства подвижных материальных объектов считают независимыми от свойств пространства и времени, которые в того же абсолютизируют. На самом деле пространство и время являются атрибутами движущейся материи, они накладывают определенный отпечаток на механические процессы, являющийся тем больше, чем ближе скорость движения тел в скорости света. В рамках своей применимости теоретическая механика занимает ведущее место среди естественных наук и имеет большое значение при исследовании механических процессов и явлений, встречающихся на практике. Законы Ньютона имеют также большое методологическое значение. Действительно, первый закон
Ньютона отражает в динамике принцип не уничтожения движения. Второй закон Ньютона
устанавливает зависимость между силой, массой и ускорением, позволяет решать конкретные задачи механики и тем самым значительно обогащает понятие силы. Третий закон Ньютона дает возможность глубже проникнуть в суть понятия силы. В нем сила выступает не односторонне, не только как действие, но и двусторонне как действие и противодействие, как взаимодействие между двумя материальными объектами.
Таким образом, согласно законам Ньютона, сила материальной категорией, ее
источниками являются физические тела, между которыми происходит взаимодействие, заключается в переносе механического движения из одного тела на другие, или в преобразовании энергии в движение.
Дифференциальные уравнения движения свободной материальной точки
Согласно трем способам задания движения точки (п 7.3) установим дифференциальное
уравнение ее движения. Если движение материальной точки массой  заданы в векторной форме с помощью радиус-вектора
заданы в векторной форме с помощью радиус-вектора  , то уравнение (13.3) примет вид:
, то уравнение (13.3) примет вид:
 (13.9)
(13.9)
В общем виде сила  может быть функцией времени, координат и скорости подвижной точки:
может быть функцией времени, координат и скорости подвижной точки: 
В природе редко встречаются силы, зависящие от ускорения. Примером силы, которая зависит от ускорения точки, может быть электромагнитная сила притяжения материальной точки в недвижимого центра, согласно закону Вебера, определяется выражением:  где
где  — расстояние точки от недвижимого центра.
— расстояние точки от недвижимого центра.
Отметим, что искусственно, с помощью вычислителей, обратных связей и исполнительных устройств можно сформировать силы, которые зависят от любой производной перемещения во времени. Так, силы, которые явно зависят от времени, встречаются при исследовании работы различного рода машин и механизмов.
К силам, зависящим от положения точки (позиционных сил), относятся силы упругости, возникающие в упругих телах при их деформации, а также силы тяжести или отталкивания, возникающие при взаимодействии тел, имеющих электрические (магнитные) заряды.
Силы, которые зависят от скорости, встречаются при исследовании движения тел в вязкой среде (жидком или газообразном). В случае необходимости и те, и другие силы можно
сформировать искусственно с помощью обратных связей. Следовательно, уравнение (13.9) наберет вида:
 (13.10)
(13.10)
Уравнению (13.10) в векторной форме соответствуют три скалярных дифференцируемых уравнения в координатной форме:
 (13.11)
(13.11)
где  — проекции вектора ускорения на оси координат,
— проекции вектора ускорения на оси координат,  — координаты точки,
— координаты точки,  — проекции скорости,
— проекции скорости,  — проекции силы.
— проекции силы.
каждое из дифференциальных уравнений (13.11) является уравнением второго порядка, система этих уравнений имеет шестой порядок. Уравнение (13.11) называются динамическими уравнениями движения материальной точки в координатной форме.
Если спроецировать обе части основного уравнения динамики (13.3) на натуральные оси (касательную  , главную нормаль
, главную нормаль  и бинормаль
и бинормаль  ) (см. п.7.12), то получим:
) (см. п.7.12), то получим:
 (13.12)
(13.12)
Эти уравнения называются динамическими уравнениями движения точки в натуральной форме, или в форме Эйлера.
При решении задач механики вызывают интерес динамические уравнения движения материальной точки в проекциях на оси полярной системы координат. Эти уравнения получим, проектируя основное уравнение динамики (13.3) соответственно на радиальное (вдоль радиуса-вектора) и трансверсальное (перпендикулярное радиус-вектора) направления (7.53):



 (13.13)
(13.13)
В случае цилиндрической системы координат (рис. 7.3) уравнение движения точки будет иметь следующий вид:
 (13.14)
(13.14)
Наконец, для сферической системы координат (рис. 7.4), если воспользоваться выражениями для ускорений, приведенными в примере 7 п. 7.15, будем иметь:



 (13.15)
(13.15)


Две основные задачи динамики свободной материальной точки
При исследовании движения материальной точки встречаются две основные задачи динамики (прямая и обратная).
Прямая или первая, основная задача
Определить равнодействующую сил F, действующих на материальную точку, если задано ее массу и кинематические уравнения движения.
Эта задача решается так.
1. Если движение материальной точки массой  задано координатным способом
задано координатным способом
 (13.16)
(13.16)
то дважды дифференцируя эти соотношения по времени, получим проекции ускорения
на оси координат, то есть:
 (13.17)
(13.17)
Тогда на основании уравнения (13.11) определим проекции сил:
 (13.18)
(13.18)
Следовательно, модуль равнодействующей силы:
 (13.19)
(13.19)
Направление силы определим по направляющим косинусам:
 (13.20)
(13.20)
2. Если движение материальной точки массой задано в натуральной форме, то по уравнениям (13.12) найдем проекции равнодействующей сил, действующих на материальную точку, на натуральные оси. Модуль силы и направление определим по формулам:
 (13.21)
(13.21)
где  — угол между силой
— угол между силой  и нормальной составляющей силы
и нормальной составляющей силы 
3. Если движение материальной точки массой  задано в полярных, цилиндрических или сферических координатах, то на основе уравнений (13.13) — (13.15) найдем модуль силы:
задано в полярных, цилиндрических или сферических координатах, то на основе уравнений (13.13) — (13.15) найдем модуль силы:
 (13.22)
(13.22)
Обратная, или вторая, основная задача
Определить кинематические уравнения движения свободной материальной точки, если задано ее массу  , прилагаемую к ней силу
, прилагаемую к ней силу  и начальные условия движения. Решение этой задачи сводится к интегрированию дифференциальных уравнений движения материальной точки. найдем проекции силы
и начальные условия движения. Решение этой задачи сводится к интегрированию дифференциальных уравнений движения материальной точки. найдем проекции силы  на оси координат, то есть
на оси координат, то есть  затем проинтегрируем систему дифференциальных уравнений (13.11). Решение этой системы будет функцией времени и шести постоянных интегрирования
затем проинтегрируем систему дифференциальных уравнений (13.11). Решение этой системы будет функцией времени и шести постоянных интегрирования 
 (13.23)
(13.23)
ибо порядок системы дифференциальных уравнений равен шести. Чтобы решить конкретную динамическую задачу, надо задать начальные условия движения для определения указанных постоянных интегрирования. Под начальными условиями движения материальной точки следует понимать значения координат точки и проекции ее скорости в начальный момент времени  то есть
то есть
 (13.24)
(13.24)
Аналогично начальные условия движения точки можно задать в векторной 
 и в натуральной
и в натуральной 
 формах и т.д. Дифференцируя (13.23) по времени, найдем еще три соотношения:
формах и т.д. Дифференцируя (13.23) по времени, найдем еще три соотношения:
 (13.25)
(13.25)
имеющие постоянные интегрирования. Если в (13.23) и в (13.25) подставить начальные условия движения точки (13.24), то получим систему из шести алгебраических уравнений с шестью неизвестными постоянными интегрирования, решая которую, найдем:
 (13.26)
(13.26)
Наконец, подставив найденные значения постоянных интегрирования в соотношение (13.23),
выражающих общее решение системы дифференциальных уравнений (13.11), получим закон движения точки:
 (13.27)
(13.27)
Рассматривая движение в натуральной форме, для решения обратной задачи динамики
применяют уравнения (13.12). Начальными условиями движения в этом случае имеет значение дуговой координаты при  и начальной скорости
и начальной скорости 
Общий интеграл первого из уравнений (13.12) имеет вид  На основании начальных условий движения находим постоянные интегрирования
На основании начальных условий движения находим постоянные интегрирования 
Вычисленную таким образом дуговую координату  подставим во второе уравнение
подставим во второе уравнение
(13.12) и получим значение радиуса кривизны р траектории подвижной точки.
Итак, решение обратной задачи динамики материальной точки включает следующие операции:
1) составление динамических уравнения движения материальной точки согласно условию задачи;
2) интегрирование полученной системы дифференциальных уравнений, то есть нахождения общего решения этой системы;
3) определение соответствующих значений постоянных интегрирования;
4) нахождения закона движения.
Пример 1. Определить траекторию движения снаряда, выпущенного из ствола пушки с начальной скоростью  под углом
под углом  к горизонту. Сопротивлением воздуха можно пренебречь (рис. 13.1). Найти дальность и наибольшую высоту полета снаряда.
к горизонту. Сопротивлением воздуха можно пренебречь (рис. 13.1). Найти дальность и наибольшую высоту полета снаряда.

Решение. В начальный момент  снаряд был в начале координат, поэтому
снаряд был в начале координат, поэтому 
 Проекции начальной скорости на оси координат запишем в виде
Проекции начальной скорости на оси координат запишем в виде 
 Чтобы определить траекторию точки, найдем зависимость координат х. у, z точки (снаряда) от времени. Для этого воспользуемся дифференциальными уравнениями движения (13.11) точки
Чтобы определить траекторию точки, найдем зависимость координат х. у, z точки (снаряда) от времени. Для этого воспользуемся дифференциальными уравнениями движения (13.11) точки 
 или после сокращения на
или после сокращения на  получим:
получим:  Интегрируя эти уравнения будем иметь:
Интегрируя эти уравнения будем иметь:  Постоянные интегрирования найдем из начальных условий движения. Получим:
Постоянные интегрирования найдем из начальных условий движения. Получим:  Поэтому
Поэтому  Следовательно:
Следовательно:  Отсюда после интегрирования получим:
Отсюда после интегрирования получим: 

Постоянные интегрирования  и
и  находим из начальных условий движения. При
находим из начальных условий движения. При 
 поэтому
поэтому  Тогда закон движения снаряда будет иметь вид:
Тогда закон движения снаряда будет иметь вид: 

Эти выражения являются также уравнением траектории в параметрическом виде. Изъяв время из этих уравнений, определим траекторию в явном виде:
 (1)
(1)
Несложно увидеть, что траекторией снаряда является парабола, которая лежит в плоскости  Наибольшего расстояния полёта
Наибольшего расстояния полёта  снаряда достигает тогда, когда
снаряда достигает тогда, когда  при
при  (рис. 13.1). То есть для нахождения необходимо прировнять нулю выражение (1):
(рис. 13.1). То есть для нахождения необходимо прировнять нулю выражение (1):

Поскольку  по условию задачи, то решением будет значение
по условию задачи, то решением будет значение  , которое получим приравняв к нулю выражение в скобках:
, которое получим приравняв к нулю выражение в скобках:

Наибольшей высоты полета при заданном угле  снаряд достигнет в точке
снаряд достигнет в точке  , то есть
, то есть

Очевидно, что наибольшее расстояние  снаряд пролетит при угле
снаряд пролетит при угле  а наибольшей высоты
а наибольшей высоты  достигнет при
достигнет при 
Пример 2. Найти закон свободного падения тел (задача Галилея).
Решение. Воспользуемся системой координат Oxyz (рис. 13.1). В этом случае  Соответствующие дифференциальные уравнения движения будут
Соответствующие дифференциальные уравнения движения будут 
При 

При таких начальных условиях получим:

Поскольку тело падает вниз, то высоту падения нужно брать со знаком минус, то есть

Отсюда закон падения тел (по Галилею)

Время падения определяться по формуле

Задача решена.
Пример 3. Торпеда, которую выпустили с подводной лодки, которая находится на расстоянии h от морского дна, начинает двигаться со скоростью  горизонтально. Считая силу сопротивления воды пропорциональной скорости, найти закон движения торпеды, если ее двигатель выключен.
горизонтально. Считая силу сопротивления воды пропорциональной скорости, найти закон движения торпеды, если ее двигатель выключен.
Решение. За координатную плоскость примем плоскость Oxyz (рис. 13.1). по условиям
задачи при 

Силу сопротивления обозначим  ; она равна
; она равна  и будет проецироваться на все оси координат. Кроме того, на торпеду действует сила притяжения
и будет проецироваться на все оси координат. Кроме того, на торпеду действует сила притяжения  С учетом указанных сил, уравнения движения (3.11) будут иметь вид:
С учетом указанных сил, уравнения движения (3.11) будут иметь вид:

или

Система уравнений движения распадается на три независимых уравнения, общее решение которых будет:

Поскольку:

то, используя заданные начальные условия, получим:

и тогда решением будет:

Отметим, что из последних уравнений легко получить закон движения при отсутствии сопротивления среды (воды). Для этого нужно рассмотреть предел при  и раскрыть с помощью правила Лопиталя неопределённость типа —
и раскрыть с помощью правила Лопиталя неопределённость типа — . В результате получим:
. В результате получим:

Уравнения движения несвободной материальной точки
При формулировке основных задач динамики свободной точки считалось, что на движения
точкой не наложено никаких ограничений. Соответствующим выбором закона изменения силы  и начальных условиях можно заставить материальную точку двигаться по любой траектории. Примером может быть движение самолетов, подводных лодок, космических аппаратов и др.
и начальных условиях можно заставить материальную точку двигаться по любой траектории. Примером может быть движение самолетов, подводных лодок, космических аппаратов и др.
Если на движение точки наложены определенные ограничения, то такое движение точки является несвободным. Например, если материальная точка (рис. 13.2) находится на конце недеформированного стержня длиной  , второй конец которого шарнирно закреплен в точке О, то при любых силах, приложенных к точке, она будет выполнять движение по поверхности сферы, радиус которой равен длине стержня. Координаты точки удовлетворять уравнению сферы:
, второй конец которого шарнирно закреплен в точке О, то при любых силах, приложенных к точке, она будет выполнять движение по поверхности сферы, радиус которой равен длине стержня. Координаты точки удовлетворять уравнению сферы:
 (13.28)
(13.28)
Вектор скорости точки всегда лежит в плоскости, касательной к сфере и построенной в
точке, которая совпадает в данный момент с материальной точкой.
Уравнение (13.28), таким образом, является уравнением сферической поверхности, которое образует связь. Итак, это уравнение связи.
Как уже отмечалось в начале курса в статике, ограничения, которые накладываются на
движение материальной точки, называют связями.
Ограничение движения точки может быть не только с помощью связи в форме поверхности,
но и в форме линий, с результатом пересечения двух поверхностей. Связи могут меняться
со временем, тогда их называют нестационарными. Можно привести примеры, когда ограничения заставляют точку двигаться только в определенной части пространства, тогда они будут записываться в форме неравенства. При наличии этих ограничений, которые называют связями на движение точки, независимо от действующих сил, координаты точки определенным образом связаны между собой и поэтому выбор начальных условиях не
может быть произвольным.
Итак, будем называть материальную точку несвободной, а ее движение — несвободным движением, если в результате тех или иных ограничений при воздействии на нее каких-либо сил она выполняет движение или по строго фиксированной линии, поверхности, или
находится в строго фиксированной части пространства.
При изучении несвободного движения точки применяют соответствующую аксиому об освобождении от связей, заменяя их действие соответствующими силами, называют реакциями связей. Тогда точку можно считать свободной, но такой, на которую действуют не только активные силы, но и пассивные — реакции связей.
Если обозначить через  равнодействующую всех активных сил, приложенных к точке,
равнодействующую всех активных сил, приложенных к точке,
а через  — равнодействующую всех реакций связей, то основное уравнение динамики в векторной форме можно записать в виде:
— равнодействующую всех реакций связей, то основное уравнение динамики в векторной форме можно записать в виде:
 (13.29)
(13.29)
Векторном уравнению (13.29) можно поставить в соответствие три скалярных в проекциях на оси:
 (13.30)
(13.30)
Особенностью этих уравнений является то, что в них реакции  с неизвестными функциями времени, поэтому система уравнений (13.30) является недоопределенной или незамкнутой. Поэтому нужно составить еще дополнительные уравнения, которые учитывали бы соответствующие уравнения связей и их свойства — идеально гладкие поверхности (без трения), шероховатые поверхности (с трением) и др.
с неизвестными функциями времени, поэтому система уравнений (13.30) является недоопределенной или незамкнутой. Поэтому нужно составить еще дополнительные уравнения, которые учитывали бы соответствующие уравнения связей и их свойства — идеально гладкие поверхности (без трения), шероховатые поверхности (с трением) и др.
Рассмотрим методику решения задач динамики свободной точки в отдельных случаях, когда точка движется:
1) по идеально гладкой неподвижной поверхности;
2) по идеально гладкой неподвижной кривой.
Движение точки по гладкой неподвижной поверхности
Для изучения движения материальной точки по поверхности используем уравнение (13.30):
 (13.31)
(13.31)
Эти уравнения включают шесть неизвестных: три координаты точки (x, y, z) и три неизвестные проекции  , реакций связей.
, реакций связей.
Как уже отмечалось, координаты точки должны удовлетворять уравнению поверхности. это
дает четвёртое уравнения:
 (13.32)
(13.32)
Конечно, четырех уравнений для определения шести неизвестных недостаточно. Для получения двух уравнений, которых не хватает, используем свойство связей и их идеальность.

Поскольку поверхность идеально гладкая, то это означает, что трение отсутствует, и реакция направлена по нормали n к поверхности.
Как известно, градиент функции 
 (13.33)
(13.33)
также является вектором, который направлен по нормали к поверхности. Итак, векторы
к поверхности. Итак, векторы  и
и  коллинеарные. Выпишем условия их коллинеарности:
коллинеарные. Выпишем условия их коллинеарности:
 (13.34)
(13.34)
Таким образом, уравнение (13.32) — (13.34) позволяют в принципе решить задачу о движении точки по гладкой поверхности. Заметим, что с уравнений (13.31) и (13.34) можно исключить реакции связей. для этого обозначим уровне отношение (13.34) через  , то есть:
, то есть:
 (13.35)
(13.35)
тогда:
 (13.36)
(13.36)
и уравнение (13.31) будет выглядеть следующим образом:
 (13.37)
(13.37)
Присоединяя к этим трем уравнениям четвёртое уравнения связи (13.32), получим систему четырех уравнений с четырьмя неизвестными
 . После нахождения этих неизвестных при формулам (13.36) можно найти проекции реакции связей и их модуль:
. После нахождения этих неизвестных при формулам (13.36) можно найти проекции реакции связей и их модуль:

 (13.38)
(13.38)
Вектор реакций связей  определяется выражением:
определяется выражением:
 (13.39)
(13.39)
Уравнение (13.37) называются уравнениями Лагранжа первого рода.
Движение точки по гладкой неподвижной кривой
Рассмотрим эффективность в этом случае уравнений Лагранжа первого рода и натуральных уравнений.
2.1. Уравнения Лагранжа первого рода. При движении точки по кривой уравнения связей имеют вид:
 (13.40)
(13.40)
поскольку кривая образуется в следствии пересечения двух поверхностей, уравнения которых 
 (рис. 13.3). В этом случае в уравнении (13.39) реакцию
(рис. 13.3). В этом случае в уравнении (13.39) реакцию  необходимо рассматривать как сумму реакций, то есть
необходимо рассматривать как сумму реакций, то есть
 (13.41)
(13.41)
где  и
и  — реакции, заменяющие соответственно действие первой и второй связей. Поэтому дифференциальные уравнения движения точки запишутся в форме:
— реакции, заменяющие соответственно действие первой и второй связей. Поэтому дифференциальные уравнения движения точки запишутся в форме:
 (13.42)
(13.42)
Эти уравнения включают девять неизвестных: три координаты точки и шесть проекций
реакций связей.
Присоединяя к уравнениям (13.42) два уравнения связей (13.40) и условия идеальности
связей:
 (13.43)
(13.43)
и
 )13.44)
)13.44)
получим девять уравнений с девятью неизвестными. Из этих уравнений, как и в предыдущем случае, можно исключить проекции связей. Для этого отношения в выражениях (13.43) и (13.44) обозначим через  , и
, и  , тогда будем иметь:
, тогда будем иметь:
 (13.45)
(13.45)
Таким образом, уравнение (13.42) наберут вида:
 (13.46)
(13.46)
Система (13.46) вместе с уравнениями связей (13.40) образует систему пяти уравнений с пятью неизвестными  . Реакции
. Реакции  и
и  определяются формулами:
определяются формулами:



 (13.47)
(13.47)
Модули этих реакций соответственно равны:
 (13.48)
(13.48)
Пример 4. Рассмотреть движение тяжелой точки массой  по внутренней поверхности цилиндра радиусом
по внутренней поверхности цилиндра радиусом  . Ось цилиндра горизонтальная (рис. 13.4).
. Ось цилиндра горизонтальная (рис. 13.4).

Решение. Совместим начало координат (Точку О) с любой точкой оси цилиндра, направим ось  вертикально, ось
вертикально, ось  горизонтально, а ось
горизонтально, а ось  — по оси цилиндра.
— по оси цилиндра.
Примем, что в начальный момент (при  ) положение точки определяется координатами:
) положение точки определяется координатами:

то есть начальная скорость направлена параллельно оси Oz.
На материальную точку действуют сила тяжести  и реакция связи
и реакция связи  , которая направлена по радиусу (рис. 13.4). Уравнение связи (цилиндрической поверхности) имеет вид:
, которая направлена по радиусу (рис. 13.4). Уравнение связи (цилиндрической поверхности) имеет вид:

откуда

Проекции сил определяются выражениями:

Подставив эти выражения для сил в уравнение (13.31), получим:
 (1)
(1)
С третьего уравнения (1), после интегрирования при заданных начальных условиях, получим

то есть расстояние от начальной плоскости Оху возрастает пропорционально времени.
Умножив первое уравнение (1) на  , а второе — на
, а второе — на  и вычитая из первого уравнения второе,
и вычитая из первого уравнения второе,
найдем:
 (2)
(2)
Умножив первое уравнение (1) на  и добавив его к другому, умноженному на
и добавив его к другому, умноженному на  , получим:
, получим:
 (3)
(3)
Перейдем теперь к цилиндрическим координатам по формулам:

Поскольку


то уравнения (2) и (3) будут выглядеть так:

или
 (4)
(4)
и
 (5)
(5)
Перепишем уравнение (4) в форме:

тогда после интегрирования получим:

Поскольку при  то
то  следовательно
следовательно
 (6)
(6)
С этого уравнения видно, что при выбранных начальных условиях движение точки будет происходить в области, где  то есть при
то есть при 
Подставив выражение (6) в уравнение (5), получим:

В соответствии формуле (13.36), получим:

Модуль реакции:

Реакция равна нулю при  Максимальное значение реакции будет при
Максимальное значение реакции будет при  и равно
и равно  Для определения закона изменении угла
Для определения закона изменении угла  нужно интегрировать уравнения (6)
нужно интегрировать уравнения (6)
Это будет сделано в следующем разделе.
Натуральные уравнения движения по кривой
Покажем, что применение натуральных уравнений при движении точки по кривой является значительно эффективным и не требует таких громоздких преобразований, которые имеют место при применении уравнений Лагранжа первого рода.
Действительно, уравнения движения точки по кривой является по определению несвободным и в проекциях на оси натурального трехгранника имеют вид:
 (13.49)
(13.49)
Подставив в (13.49) выражения для проекций ускорения, получим:
 (13.50)
(13.50)
Уравнение (13.50) называются натуральным уравнениями движения. С третьего уравнения следует, что бинормальная составляющая реакции  определяется статически через бинормальную составляющую активной силы и не зависит от закона движения точки.
определяется статически через бинормальную составляющую активной силы и не зависит от закона движения точки.
При заданных активных силах и известных уравнениях связей (13.40) уравнение (13.49) позволяют определить закон движения точки и реакции связей. Заметим, что между проекциями реакции  существует достаточно простая взаимосвязь.
существует достаточно простая взаимосвязь.
Так, при движении точки по шершавой кривой проекция  является силой трения скольжения, модуль которой равен:
является силой трения скольжения, модуль которой равен:
 (13.51)
(13.51)
где  — коэффициент трения скольжения.
— коэффициент трения скольжения.
Сила трения скольжения всегда направлена противоположно скорости, поэтому:
 (13.52)
(13.52)
Если движение точки происходит по идеально гладкой поверхности, то  и натуральные уравнения движения принимают вид:
и натуральные уравнения движения принимают вид:
 (13.53)
(13.53)
Как видно из уравнений (13.53), в этом случае первое уравнение служит для определения закона движения, а второе и третье — для определения реакции связи. При движении точки по плоской, неподвижной шероховатой кривой уравнения (13.50) записывается в форме:
 (13.54)
(13.54)
Пример 5. Используя уравнения (13.53), исследовать движение математического маятника (рис. 13.5). (Математическим маятником называется материальная точка, которая движется под действием силы веса по гладкому кругу, расположенного в вертикальной плоскости).

Решение. Реализуем заданное движение точки по гладкому кругу, подвесив материальную
точку массой  на нить, которая не растягивается, а второй конец нити закрепим в
на нить, которая не растягивается, а второй конец нити закрепим в
точке О (рис. 13.5) При этом начальная скорость подвешенной точки будет располагаться в
вертикальной плоскости Оху перпендикулярно радиусу. Такая конструкция маятника реализует движение точки по гладкому кругу (так как трение отсутствует).
Положение точки определяем углом  между вертикалью (осью Ох) и нитью. Если
между вертикалью (осью Ох) и нитью. Если
масса точки  , то действующая на точку сила тяжести равна
, то действующая на точку сила тяжести равна  и направлена вертикально — параллельно оси
и направлена вертикально — параллельно оси  . Поскольку длина нити равна
. Поскольку длина нити равна  то дуговая координата
то дуговая координата  и скорость
и скорость 
точки будут:

Соответствующие проекции силы на направление нормали  и касательной
и касательной  будут определяться выражениями
будут определяться выражениями

Реакция  в этом случае будет направлена всегда вдоль нити к точке ее закрепления.
в этом случае будет направлена всегда вдоль нити к точке ее закрепления.
Радиус кривизны  в этом случае равна
в этом случае равна  С учетом изложенного уравнение (13.53) будут выглядеть так:
С учетом изложенного уравнение (13.53) будут выглядеть так:

поскольку: 
Перепишем последние уравнения в следующем виде:
 (1)
(1)
 (2)
(2)
Как видим, уравнение (1) служит для определения закона движения маятника, а уравнения (2) — для определение реакции нити. Пусть в начальный момент  нить отклонена от вертикали на угол
нить отклонена от вертикали на угол  и отпущена с угловой скоростью
и отпущена с угловой скоростью  . Определим реакцию в зависимости от угла
. Определим реакцию в зависимости от угла  , а также закон движения точки
, а также закон движения точки 
Согласно уравнению (2) для определения реакции  в зависимости от угла
в зависимости от угла  нужно выразить величину
нужно выразить величину  через этот угол. Представим
через этот угол. Представим  в уравнении (1) в форме сложной функции:
в уравнении (1) в форме сложной функции:


запишем уравнение (1) в виде уравнения с раздельными переменными:

Учитывая начальные условия  проинтегрируем это уравнение, тогда будем иметь
проинтегрируем это уравнение, тогда будем иметь

Отсюда получим:
 (3)
(3)
Определив  , подставим его в уравнение (2), получим:
, подставим его в уравнение (2), получим:

Если учесть, что  , тогда последнем выражения можно придать форму:
, тогда последнем выражения можно придать форму:
 (4)
(4)
Исследуем полученный решение (4). Найдем такие параметры движения, в частности угол  . когда нить помнется, то есть связь перестанет быть удерживающей. Это наступит тогда, когда
. когда нить помнется, то есть связь перестанет быть удерживающей. Это наступит тогда, когда  Из (4) получим соответствующую неравенство:
Из (4) получим соответствующую неравенство:

Отсюда имеем:

Если поставить условие, чтобы связь была удерживающей при любом угле, даже при верхнем вертикальном положении нити  , то начальная скорость должна быть:
, то начальная скорость должна быть:

при этом маятник выполнять круговое движение. В частности, при  , получим
, получим 
Если начальная скорость  равна нулю
равна нулю  то формула (3) примет вид:
то формула (3) примет вид:
 (5)
(5)
Следовательно , в течение всего движения должны выполняться неравенства  и
и  физический смысл которых означает, что при этих условиях маятник выполнять только колебательное движение относительно вертикального положения с амплитудой, которая меньше
физический смысл которых означает, что при этих условиях маятник выполнять только колебательное движение относительно вертикального положения с амплитудой, которая меньше  .
.
Перейдем к определению закона движения маятника 
Обозначив в уравнении (1)  запишем его в форме
запишем его в форме  Как видим, это дифференциальное уравнение является нелинейным и интегрировать его довольно трудно, Поэтому ограничимся случаем малых отклонений, когда можно принять
Как видим, это дифференциальное уравнение является нелинейным и интегрировать его довольно трудно, Поэтому ограничимся случаем малых отклонений, когда можно принять  В этом случае дифференциальные уравнения движения
В этом случае дифференциальные уравнения движения  совпадают по форме с
совпадают по форме с
дифференциальными уравнениями свободных прямолинейных колебаний, которые мы рассматривали в кинематике простейших движений.
Следовательно, угол  будет изменяться по гармоническому закону
будет изменяться по гармоническому закону  Период этих малых колебаний маятника равен:
Период этих малых колебаний маятника равен:

а амплитуда колебаний:

Как видим, при малых колебаниях период не зависит от начального отклонения  и начальной скорости
и начальной скорости  , то есть от амплитуды колебаний
, то есть от амплитуды колебаний  Такие колебания называют изохронными и их период определяется формулой Гюйгенса.
Такие колебания называют изохронными и их период определяется формулой Гюйгенса.
В разделе нелинейных колебаний покажем, что на самом деле колебания математического маятника не есть изохронными, потому что их период зависит от амплитуды колебаний.
На этом завершим исследования математического маятника.
Статическая деформация двух одинаковых параллельных пружин под действием грузов D (mD = 0,5 кг) и Е (mE = 1,5 кг) fст = 4 см. Грузы подвешены к пружинам с помощью абсолютно жесткого бруска АВ. В некоторый момент времени стержень, соединяющий грузы, перерезают. Сопротивление движению груза D пропорционально скорости: R = 6v, где v — скорость. Массой бруска и массой прикрепленной к бруску части демпфера пренебречь.
Найти уравнение движения системы грузов D и Е, отнеся их движение к оси х; начало отсчета совместить с положением покоя груза системы грузов D и Е (при статической деформации пружин). Стержень, соединяющий грузы, считать невесомым и недеформируемым.

— БЕСПЛАТНОЕ РЕШЕНИЕ из интернета:

— ПЛАТНОЕ РЕШЕНИЕ от профессионала: