Формулы пружинного маятника в физике
Формулы пружинного маятника
Определение и формулы пружинного маятника
Определение
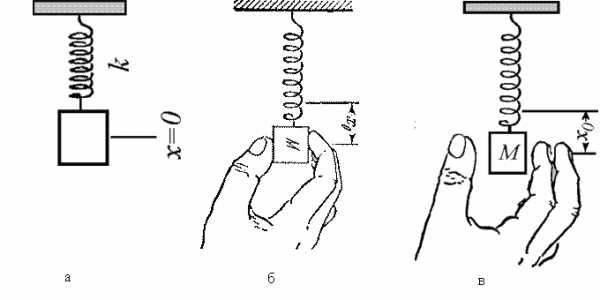
Пружинным маятником называют систему, которая состоит из упругой пружины, к которой прикреплен груз.
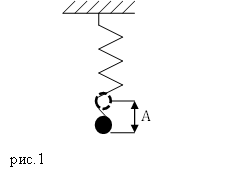
Допустим, что масса груза равна $m$, коэффициент упругости пружины $k$. Масса пружины в таком маятнике обычно не учитывается. Если рассматривать вертикальные движения груза (рис.1), то он движется под действием силы тяжести и силы упругости, если систему вывели из состояния равновесия и предоставили самой себе.
Уравнения колебаний пружинного маятника
Пружинный маятник, совершающий свободные колебания является примером гармонического осциллятора. Допустим, что маятник совершает колебания вдоль оси X. Если колебания малые, выполняется закон Гука, то уравнение движения груза имеет вид:
[ddot{x}+{omega }^2_0x=0left(1right),]
где ${щu}^2_0=frac{k}{m}$ — циклическая частота колебаний пружинного маятника. Решением уравнения (1) является функция:
[x=A{cos left({omega }_0t+varphi right)=A{sin left({omega }_0t+{varphi }_1right) } }left(2right),]
где ${omega }_0=sqrt{frac{k}{m}}>0$- циклическая частота колебаний маятника, $A$ — амплитуда колебаний; ${(omega }_0t+varphi )$ — фаза колебаний; $varphi $ и ${varphi }_1$ — начальные фазы колебаний.
В экспоненциальном виде колебания пружинного маятника можно записать как:
[Re tilde{x}=Releft(Acdot exp left(ileft({omega }_0t+varphi right)right)right)left(3right).]
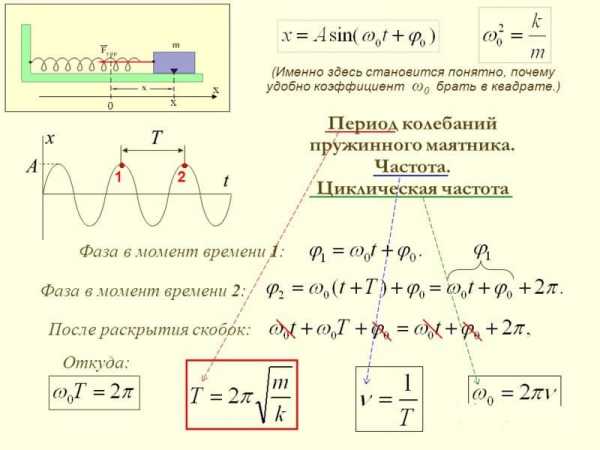
Формулы периода и частоты колебаний пружинного маятника
Если в упругих колебаниях выполняется закон Гука, то период колебаний пружинного маятника вычисляют при помощи формулы:
[T=2pi sqrt{frac{m}{k}}left(4right).]
Так как частота колебаний ($nu $) — величина обратная к периоду, то:
[nu =frac{1}{T}=frac{1}{2pi }sqrt{frac{k}{m}}left(5right).]
Формулы амплитуды и начальной фазы пружинного маятника
Зная уравнение колебаний пружинного маятника (1 или 2) и начальные условия можно полностью описать гармонические колебания пружинного маятника. Начальные условия определяют амплитуда ($A$) и начальная фаза колебаний ($varphi $).
Амплитуду можно найти как:
[A=sqrt{x^2_0+frac{v^2_0}{{omega }^2_0}}left(6right),]
начальная фаза при этом:
[tg varphi =-frac{v_0}{x_0{omega }_0}left(7right),]
где $v_0$ — скорость груза при $t=0 c$, когда координата груза равна $x_0$.
Энергия колебаний пружинного маятника
При одномерном движении пружинного маятника между двумя точками его движения существует только один путь, следовательно, выполняется условие потенциальности силы (любую силу можно считать потенциальной, если она зависит только от координат). Так как силы, действующие на пружинный маятник потенциальны, то можно говорить о потенциальной энергии.
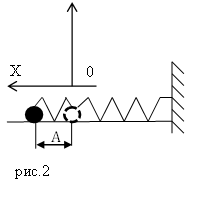
Пусть пружинный маятник совершает колебания в горизонтальной плоскости (рис.2). За ноль потенциальной энергии маятника примем положение его равновесия, где поместим начало координат. Силы трения не учитываем. Используя формулу, связывающую потенциальную силу и потенциальную энергию для одномерного случая:
[E_p=-frac{dF}{dx}(8)]
учитывая, что для пружинного маятника $F=-kx$,
тогда потенциальная энергия ($E_p$) пружинного маятника равна:
[E_p=frac{kx^2}{2}=frac{m{{omega }_0}^2x^2}{2}left(9right).]
Закон сохранения энергии для пружинного маятника запишем как:
[frac{m{dot{x}}^2}{2}+frac{m{{omega }_0}^2x^2}{2}=const left(10right),]
где $dot{x}=v$ — скорость движения груза; $E_k=frac{m{dot{x}}^2}{2}$ — кинетическая энергия маятника.
Из формулы (10) можно сделать следующие выводы:
- Максимальная кинетическая энергия маятника равна его максимальной потенциальной энергии.
- Средняя кинетическая энергия по времени осциллятора равна его средней по времени потенциальной энергии.
Примеры задач с решением
Пример 1
Задание. Маленький шарик, массой $m=0,36$ кг прикреплен к горизонтальной пружине, коэффициент упругости которой равен $k=1600 frac{Н}{м}$. Каково было начальное смещение шарика от положения равновесия ($x_0$), если он при колебаниях проходит его со скоростью $v=1 frac{м}{с}$?
Решение. Сделаем рисунок.
По закону сохранения механической энергии (так как считаем, что сил трения нет), запишем:
[E_{pmax}=E_{kmax }left(1.1right),]
где $E_{pmax}$ — потенциальная энергия шарика при его максимальном смещении от положения равновесия; $E_{kmax }$ — кинетическая энергия шарика, в момент прохождения положения равновесия.
[E_{kmax }=frac{mv^2}{2}left(1.2right).]
Потенциальная энергия равна:
[E_{pmax}=frac{k{x_0}^2}{2}left(1.3right).]
В соответствии с (1.1) приравняем правые части (1.2) и (1.3), имеем:
[frac{mv^2}{2}=frac{k{x_0}^2}{2}left(1.4right).]
Из (1.4) выразим искомую величину:
[x_0=vsqrt{frac{m}{k}}.]
Вычислим начальное (максимальное) смещение груза от положения равновесия:
[x_0=1cdot sqrt{frac{0,36}{1600}}=1,5 cdot {10}^{-3}(м).]
Ответ. $x_0=1,5$ мм
Пример 2
Задание. Пружинный маятник совершает колебания по закону: $x=A{cos left(omega tright), } $где $A$ и $omega $ — постоянные величины. Когда возвращающая сила в первый раз достигает величины $F_0,$ потенциальная энергия груза равна $E_{p0}$.
В какой момент времени это произойдет?
Решение. Возвращающей силой для пружинного маятника является сила упругости, равная:
[F=-kx=-kA{cos left(omega tright)left(2.1right). }]
Потенциальную энергию колебаний груза найдем как:
[E_p=frac{kx^2}{2}=frac{kA^2{{cos }^2 left(omega tright) }}{2}left(2.2right).]
В момент времени, который следует найти $F=F_0$; $E_p=E_{p0}$, значит:
[frac{E_{p0}}{F_0}=-frac{A}{2}{cos left(omega tright) }to t=frac{1}{omega } arc{cos left(-frac{2E_{p0}}{AF_0}right) }.]
Ответ. $t=frac{1}{omega } arc{cos left(-frac{2E_{p0}}{AF_0}right) }$
Читать дальше: формулы равноускоренного прямолинейного движения.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!

Груз,
подвешенный на пружине, растягивает ее на 25 мм. Какова будет максимальная
скорость, если он будет совершать колебания вдоль вертикально направленной оси
с амплитудой, равной также 25 мм?
Решение.
Предположим,
что масса груза и жесткость пружины равны соответственно m и
k. Тогда для покоящегося груза, подвешенного на пружине, в состоянии равновесия выполняется равенство mg = kx0 , откуда k/m = g/x0 .
Если теперь этот
груз отклонить вверх или вниз от его положения равновесия, он начнет совершать
вдоль вертикальной оси OX гармонические
колебания. Действительно, если за x = 0 принять координату
точки, находясь в которой груз не деформирует пружину, то проекция на ось OX результирующей силы, действующей на груз, находящихся в точке x, будет равна mg – kx = kx0 – kx = —k(x – x0) = —kx’ , где x’ – x – x0 . Поскольку координаты
x’ и x отличаются
друг от друга только на постоянную величину x0 , проекции ускорения груза на оси OX и OX’ будут равны: ax = a’x
. Поэтому уравнение второго закона Ньютона, записанное в проекциях на ось OX’, принимает вид: ma’x = —kx, совпадающий с уравнением гармонических колебаний. Отсюда
следует, что груз будет совершать гармонические колебания.

Согласно
закону сохранения энергии максимальная кинетическая энергия тела, совершающего гармонические
колебания, равна его максимальной потенциальной энергии.
A – амплитуда колебаний.
Отсюда находим vmax .

Подставляем
сюда найденное выше выражение для k/m учитывая, что по условию задачи A
= x0 .

Ответ:
umax = 0,5 м/с.
Источник: Подготовка к тестированию по физике. Шепелевич. В. Г.
Содержание:
Гармонические колебания:
Некоторые движения, встречающиеся в быту, за равные промежутки времени повторяются. Такое движение называется периодическим движением. Часто встречается движение, при котором тело перемещается то в одну, то в другую сторону относительно равновесного состояния. Такое движение тела называется колебательным движением или просто колебанием.
Колебания, совершаемые телом, которое выведено из равновесного состояния в результате действия внутренних сил, называются собственными (свободными) колебаниями. Величина удаления от равновесного состояния колеблющегося тела называется его смещением (
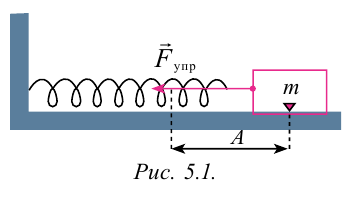
Для наблюдения механических колебаний ознакомимся с колебаниями груза, закрепленного на конце пружины (рис. 5.1). На этом рисунке груз, закрепленный на пружине, сможет двигаться без трения с горизонтальным стержнем, так как силу тяжести шарика приводит в равновесие реакционная сила стержня.
Коэффициент упругости пружины –  , а ее масса ничтожна мала и можно ее не учитывать. Считаем, что масса системы сосредоточена в грузе, а упругость в пружине.
, а ее масса ничтожна мала и можно ее не учитывать. Считаем, что масса системы сосредоточена в грузе, а упругость в пружине.
Если груз, который находится в равновесии, потянем вправо на расстояние  и отпустим, то под действием силы упругость, которая появляется в пружине, груз смещается в
и отпустим, то под действием силы упругость, которая появляется в пружине, груз смещается в
сторону равновесного состояния.

С течением времени смещение груза уменьшается относительно  , но скорость груза при этом увеличивается. Когда груз доходит до равновесного состояния, его смещение (
, но скорость груза при этом увеличивается. Когда груз доходит до равновесного состояния, его смещение ( ) равняется нулю и соответственно сила упругости равняется нулю. Но груз по инерции начинает двигаться в левую сторону. Модуль силы упругости, которая появляется в пружине, тоже растет. Однако из-за того, что сила упругости постоянно направлена против смещения груза, она начинает тормозить груз. В результате движение груза замедляется, и, в результате, прекращается. Теперь груз под воздействием эластической силы сжатой пружины начинает двигаться в сторону равновесного состояния.
) равняется нулю и соответственно сила упругости равняется нулю. Но груз по инерции начинает двигаться в левую сторону. Модуль силы упругости, которая появляется в пружине, тоже растет. Однако из-за того, что сила упругости постоянно направлена против смещения груза, она начинает тормозить груз. В результате движение груза замедляется, и, в результате, прекращается. Теперь груз под воздействием эластической силы сжатой пружины начинает двигаться в сторону равновесного состояния.
Для определения закономерности изменения в течение времени системы, которая периодически совершает колебания, заполним воронку песком, подвесим на веревке, подложим бумагу под систему и раскачаем воронку. В ходе колебания начинаем равномерно вытягивать бумагу из-под системы. В результате мы увидим, что следы песка на бумаге образуют синусоиду. Из этого можно сделать следующий вывод: смещение периодически колеблющегося тела по истечении времени изменяется по закону синусов и косинусов. При этом самое большое значение смещения равняется амплитуде ():

здесь:  – циклическая частота, зависящая от параметров колеблющихся систем,
– циклическая частота, зависящая от параметров колеблющихся систем,  – начальная фаза, (
– начальная фаза, ( ) фаза колебания с течением времени
) фаза колебания с течением времени  .
.
Из математики известно, что  поэтому формулу (5.2.) можно записать в виде
поэтому формулу (5.2.) можно записать в виде

Колебания, в которых с течением времени параметры меняются по закону синуса или косинуса, называются гармоническими колебаниями.
Значит, пружинный маятник, вышедший из равновесного состояния, совершает гармоническое колебание. Для того чтобы система совершала гармоническое колебание: 1) при выходе тела из равновесного состояния, для возвращения его в равновесное состояние должна появиться внутренняя сила; 2) колеблющееся тело должно обладать инертностью и на него не должны оказывать воздействие силы трения и сопротивления. Эти условия называется условиями проявления колебательных движений.
Основные параметры гармонических колебаний
a) период колебания  – время одного полного колебания:
– время одного полного колебания:
 )
)
б) частота колебания  – количество колебаний, совершаемых за 1 секунду:
– количество колебаний, совершаемых за 1 секунду:

Единица 
c) циклическая частота  – количество колебаний за
– количество колебаний за  секунд:
секунд:

С учетом формул (5.5) и (5.6) уравнение гармонических колебаний (5.2) можно записать в следующей форме.

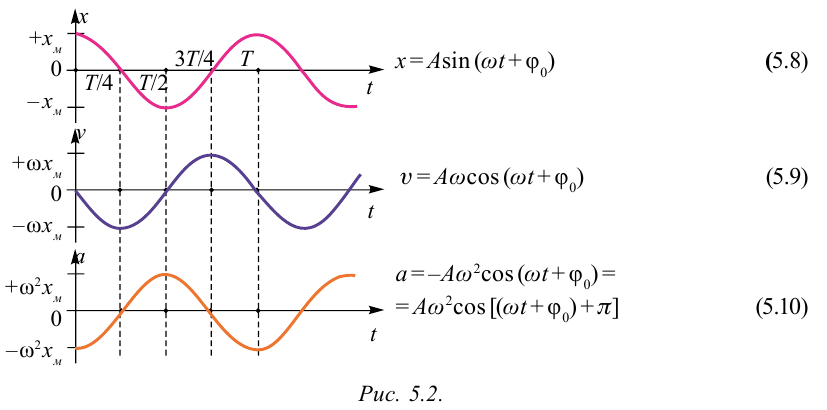
Большинство величин, количественно описывающих гармонические колебания, смещения которых с течением времени меняются по закону синусов или косинусов (скорость, ускорение, кинетическая и потенциальная энергия), тоже гармонически меняются.
Это подтверждается следующими графиками и уравнениями:
Пример решения задачи:
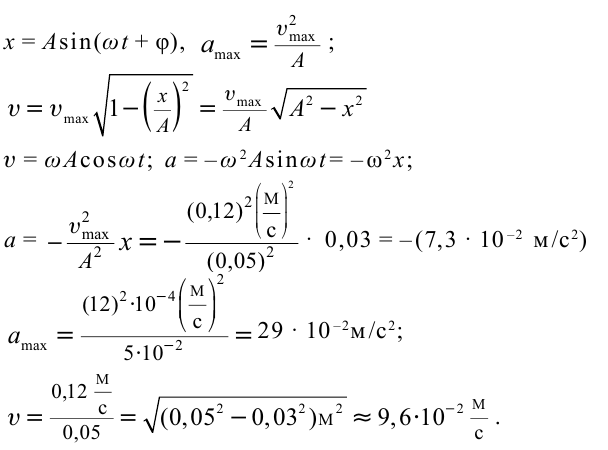
Точка совершает гармоническое колебательное движение. Максимальное смещение и скорость соответственно равны 0,05 м и 0,12 м/с. Найдите максимальное ускорение и скорость колебательного движения, а также ускорение точки в момент, когда смещение равно 0,03 м.
Дано:
Найти:

Формула и решение:
Гармонические колебания пружинного маятника
В 1985 году в городе Мехико произошла ужасная катастрофа, причина которой было землетрясение: 5526 человек погибли, 40 ООО человек ранены, 31000 человек остались без крова. Из проведенных затем исследований ученые выяснили, что главной причиной разрушений во время землетрясения является совпадение частоты свободных колебаний зданий с частотой вынужденных колебаний Земли. Поэтому при возведении новых зданий в сейсмически активной зоне необходимо, чтобы эти частоты не совпадали. Это даст возможность уменьшить последствия землетрясения. С этой целью важно знать, от чего зависят частота и период колебаний.
Одной из простейших колебательных систем, совершающих гармонические колебания, является пружинный маятник.
Пружинный маятник — это колебательная система, состоящая из пружины и закрепленного на ней тела. Колебания, возникающие в пружинном маятнике, являются гармоническими колебаниями:
Под гармоническими колебаниями подразумеваются колебания, возникающие под действием силы, прямо пропорциональной перемещению и направленной против направления перемещения.
Исследование колебаний пружинного маятника имеет большое практическое значение, например, при вычислении колебаний рессор автомобиля при езде; в исследовании воздействия колебаний на фундамент зданий и тяжелых станков, в определении эластичности ушных перепонок при диагностике лор-заболеваний. По этой причине изучение колебаний пружинного маятника является актуальной проблемой.
С целью уменьшения количества сил, действующих на колебательную систему, целесообразно использовать горизонтально расположенную колебательную систему пружина-шарик (d).
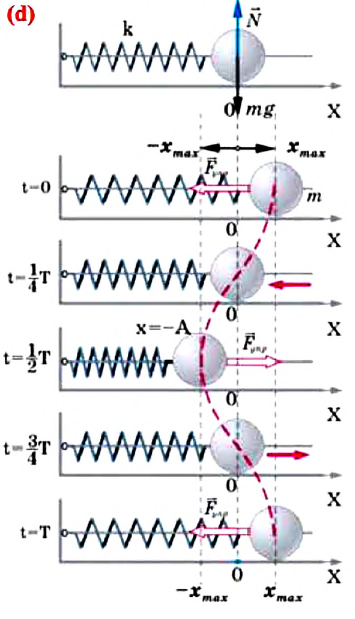
В этой системе действия силы тяжести и реакции опоры уравновешивают друг друга. При выведении шарика из состоянии равновесия, например, при растяжении пружины до положения  сила упругости, возникающая в ней, сообщает шарику ускорение и приводит его в колебательное движение. По II закону Ньютона уравнение движения маятника можно записать так:
сила упругости, возникающая в ней, сообщает шарику ускорение и приводит его в колебательное движение. По II закону Ньютона уравнение движения маятника можно записать так:

или
Формула (4.9) является уравнением свободных гармонических колебаний пружинного маятника.
Где  — масса шарика, закрепленного на пружине,
— масса шарика, закрепленного на пружине,  — проекция ускорения шарика вдоль оси
— проекция ускорения шарика вдоль оси  — жесткость пружины,
— жесткость пружины,  -удлинение пружины, равное амплитуде колебания. Для данной колебательной системы отношение
-удлинение пружины, равное амплитуде колебания. Для данной колебательной системы отношение  — постоянная положительная величина (так как масса и жесткость не могут быть отрицательными). При сравнении уравнения колебаний (4.9) пружинного маятника с выражением для другого вида периодического движения — известным выражением центростремительного ускорения при равномерном движении по окружности получается, что отношение
— постоянная положительная величина (так как масса и жесткость не могут быть отрицательными). При сравнении уравнения колебаний (4.9) пружинного маятника с выражением для другого вида периодического движения — известным выражением центростремительного ускорения при равномерном движении по окружности получается, что отношение  соответствует квадрату циклической частоты
соответствует квадрату циклической частоты 
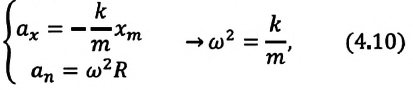
или
Таким образом, уравнение движения пружинного маятника можно записать и так:

Уравнение (4.12) показывает, что колебания пружинного маятника с циклической частотой  являются свободными гармоническими колебаниями. Из математики известно, что решением этого уравнения является:
являются свободными гармоническими колебаниями. Из математики известно, что решением этого уравнения является:

Так как тригонометрическая функция является гармонической функцией, то и колебания пружинного маятника являются гармоническими колебаниями.
Здесь  фаза колебания,
фаза колебания,  — начальная фаза. Единица измерения фазы в СИ — радиан (1 рад). Фазу также можно измерять в градусах:
— начальная фаза. Единица измерения фазы в СИ — радиан (1 рад). Фазу также можно измерять в градусах:  Значение начальной фазы зависит от выбора начального момента времени. Начальный момент времени можно выбрить так, чтобы
Значение начальной фазы зависит от выбора начального момента времени. Начальный момент времени можно выбрить так, чтобы  В этом случае формулу гармонических колебаний пружинного маятника можно записать так:
В этом случае формулу гармонических колебаний пружинного маятника можно записать так:
 или
или 
Из сравнения выражений (4.11) и (4.5) определяются величины, от которых зависят период и частота колебаний пружинного маятника:
Из выражений (4.14) и (4.15) видно, что период и частота пружинного маятника зависят от жесткости пружины и массы груза, подвешенного к нему.
Гармонические колебания математического маятника
До наших дней дошла такая историческая информация: однажды в 1583 году итальянский ученый Г. Галилей, находясь в храме города Пиза, обратил внимание на колебательное движение люстры, подвешенной на длинном тросе. Он, сравнивая колебания люстры со своим пульсом, определил, что, несмотря на уменьшение амплитуды колебания, время, затрачиваемое на одно полное колебание (период колебания) люстры, не изменяется. Затем Галилей в результате многочисленных проведенных исследований, изменяя длину нитевого маятника, массу подвешенного к нему груза, высоту расположения маятника (по сравнению с уровнем моря), определил, от чего зависят период и частота колебаний маятника.
Гармонические колебания возникают также под действием силы тяжести. Это можно наблюдать с помощью математического маятника.
Математический маятник — это идеализированная колебательная система, состоящая из материальной точки, подвешенной на невесомой и нерастяжимой нити.
Для исследования колебаний математического маятника можно использовать систему, состоящую из тонкой длинной нити и шарика (b).
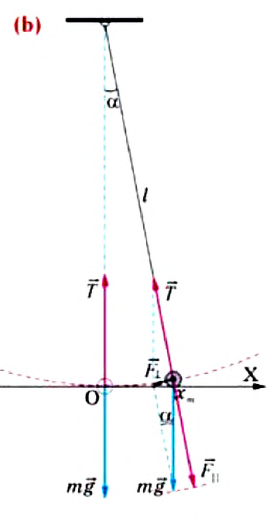
Сила тяжести  действующая на шарик в положении равновесия маятника, уравновешивается силой натяжения нити
действующая на шарик в положении равновесия маятника, уравновешивается силой натяжения нити  Однако, если вывести маятник из состояния равновесия, сместив его на малый угол
Однако, если вывести маятник из состояния равновесия, сместив его на малый угол  в сторону, то возникают две составляющие вектора силы тяжести -направленная вдоль нити
в сторону, то возникают две составляющие вектора силы тяжести -направленная вдоль нити  и перпендикулярная нити
и перпендикулярная нити  Сила натяжения
Сила натяжения  и составляющая силы тяжести
и составляющая силы тяжести  уравновешивают друг друга. Поэтому равнодействующая сила будет равна составляющей
уравновешивают друг друга. Поэтому равнодействующая сила будет равна составляющей  «пытающейся» вернуть тело в положение равновесия (см.: рис. b). Учитывая вышеуказанное и ссылаясь на II закон Ньютона, можно написать уравнение колебательного движения тела массой
«пытающейся» вернуть тело в положение равновесия (см.: рис. b). Учитывая вышеуказанное и ссылаясь на II закон Ньютона, можно написать уравнение колебательного движения тела массой  в проекциях на ось ОХ:
в проекциях на ось ОХ:
Приняв во внимание, что:

Для уравнения движения математического маятника получим:

Где  — длина математического маятника (нити),
— длина математического маятника (нити),  — ускорение свободного падения,
— ускорение свободного падения,  — амплитуда колебания.
— амплитуда колебания.
Для данной колебательной системы отношение  — постоянная положительная величина, потому что ускорение свободного падения и длина нити не могут быть отрицательными. Если сравнить уравнения (4.16) и (4.10), с легкостью можно увидеть, что отношение также соответствует квадрату циклической частоты
— постоянная положительная величина, потому что ускорение свободного падения и длина нити не могут быть отрицательными. Если сравнить уравнения (4.16) и (4.10), с легкостью можно увидеть, что отношение также соответствует квадрату циклической частоты 

или

Таким образом, уравнение движения математического маятника можно записать и так:

Уравнение (4.19) показывает, что колебания математического маятника являются гармоническими колебаниями с циклической частотой со. Из математики вы знаете, что решением этого уравнения является нижеприведенная функция:

Так как эта функция является гармонической, то и колебания математического маятника являются гармоническими колебаниями.
Отсюда определяются величины, от которых зависят период и частота колебаний математического маятника:
Таким образом, период и частота колебаний математического маятника зависят от длины маятника и напряженности гравитационного поля в данной точке.
Скорость и ускорение при гармонических колебаниях
Вы уже знакомы с основными тригонометрическими функциями и умеете строить графики тригонометрических уравнений, описывающих гармонические колебания.
При гармонических колебаниях маятника его смещение изменяется по гармоническому закону, поэтому не трудно доказать, что его скорость и ускорение также изменяются по гармоническому закону. Предположим, что смещение изменяется по закону косинуса и начальная фаза равна нулю

Так как скорость является первой производной смещения (координат) по времени, то:

или

Как видно из выражения (4.23), скорость, изменяющаяся по гармоническому закону, опережает колебания смещения по фазе на  (а).
(а).
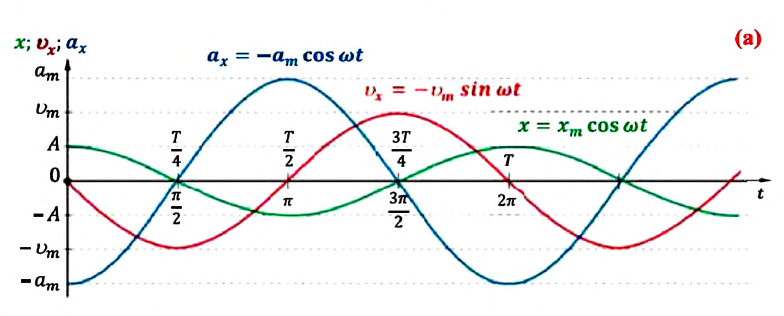
Максимальное (амплитудное) значение скорости зависит от амплитуды, частоты и периода колебаний:

Так как ускорение является первой производной скорости по времени, то получим:

или

Как видим, колебания ускорения, изменяющегося по гармоническому закону, опережают колебания скорости по фазе на  а колебания смещения на
а колебания смещения на
 (см.: рис. а). Максимальное (амплитудное) значение ускорения зависит от амплитуды, частоты и периода колебаний:
(см.: рис. а). Максимальное (амплитудное) значение ускорения зависит от амплитуды, частоты и периода колебаний:

Превращения энергии при гармонических колебаниях
Теоретический материал
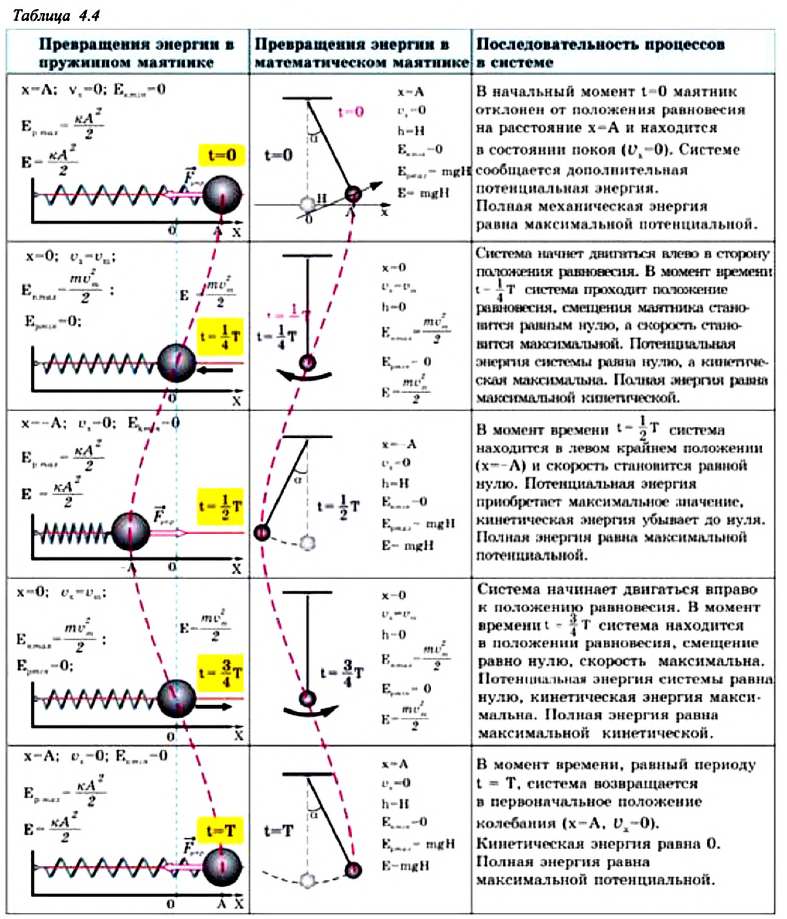
Потенциальная и кинетическая энергия свободных гармонических колебаний в замкнутой системе периодически превращаются друг в друга.
В таблице 4.4 дано сравнение превращений энергий в пружинном и математическом маятниках. Как видно из таблицы, потенциальная энергия колебательной системы в точке возвращения  имеет максимальное значение:
имеет максимальное значение:
Если же маятник находится в точке равновесия, потенциальная энергия минимальна:

Кинетическая энергия системы, наоборот, в точке возвращения минимальна  а в точке равновесия максимальна:
а в точке равновесия максимальна:
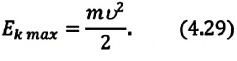
На рисунке (а) даны графики зависимости потенциальной и кинетической энергии при гармоническом колебательном движении от смещения.
Полная механическая энергия замкнутой колебательной системы в произвольный момент времени  остается постоянной (трение не учитывается):
остается постоянной (трение не учитывается):
a) для пружинного маятника:
b) для математического маятника:
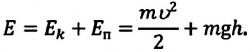
Если принять во внимание изменение смещения и скорости по гармоническому закону в формулах потенциальной и кинетической энергии колебательного движения, то станет очевидно, что при гармонических колебаниях эти энергии так же изменяются по гармоническому закону (b):

Как было отмечено выше, полная энергия системы не изменяется по гармоническому закону:

• Полная энергия гармонических колебаний прямо пропорциональна квадрату амплитуды колебаний.
Если же в системе существует сила трения, то его полная энергия не сохраняется — изменение полной механической энергии равно работе силы трения. В результате колебания затухают: 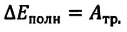
Превращения энергии при гармонических колебаниях
Механическая энергия системы равна сумме ее кинетической и потенциальной энергий. Кинетической энергией тело обладает вследствие своего движения, а потенциальная энергия определяется взаимодействием тела с другими телами или полями. Механическая энергия замкнутой системы, в которой не действуют силы трения (сопротивления), сохраняется.
Поскольку при колебаниях гармонического осциллятора силу трения не учитывают, то его механическая энергия сохраняется.
Рассмотрим превращения энергии при колебаниях математического маятника. Выберем систему отсчета таким образом, чтобы в положении равновесия его потенциальная энергия была равна нулю.
При отклонении маятника на угол а (рис. 7), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:

Рис. 7. Превращения энергии при колебаниях математического маятника
Поскольку при прохождении положения равновесия его потенциальная энергия равна нулю, то кинетическая энергия (а следовательно, и скорость) будет максимальна:
Из закона сохранения механической энергии следует (рис. 8), что
 (1)
(1)
Отсюда найдем модуль максимальной скорости маятника:
 (2)
(2)
Высоту  можно выразить через длину маятника l и амплитуду колебаний А.
можно выразить через длину маятника l и амплитуду колебаний А.
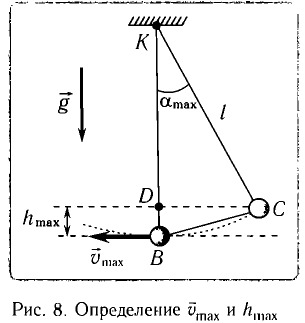
Если колебания малые, то  Из треугольника KCD на рисунке 8 находим
Из треугольника KCD на рисунке 8 находим

Отсюда

Подставив выражение для в формулу I (2), получим
Подставляя выражения для  и в соотношение (1), находим
и в соотношение (1), находим

Таким образом, в положении равновесия потенциальная энергия полностью переходит в кинетическую, а в положениях максимального отклонения кинетическая энергия полностью переходит в потенциальную.
В любом промежуточном положении

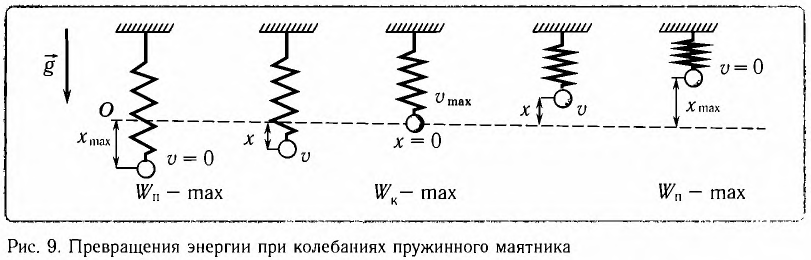
Покажем, что аналогичные превращения энергии имеют место и для пружинного маятника (рис. 9). В крайних точках, когда координата груза принимает значение  , модуль его скорости равен нулю (v = 0) и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
, модуль его скорости равен нулю (v = 0) и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
Таким образом, получаем, что механическая энергия гармонического осциллятора пропорциональна квадрату амплитуды колебаний.
В положении равновесия, когда x = 0, вся энергия осциллятора переходит в кинетическую энергию груза:
где  — модуль максимальной скорости груза при колебаниях.
— модуль максимальной скорости груза при колебаниях.
В промежуточных точках полная механическая энергия

Отсюда можно вывести выражение для модуля скорости  груза в точке с
груза в точке с
координатой х:
Так как 
Энергия при гармонических колебаниях
Механическая энергия системы равна сумме ее кинетической и потенциальной энергии. Механическая энергия замкнутой системы, в которой не действуют силы трения (сопротивления), сохраняется.
Поскольку при колебаниях гармонического осциллятора силой трения пренебрегают, то его механическая энергия сохраняется. Рассмотрим превращения энергии при колебаниях математического маятника. Выберем систему отсчета таким образом, чтобы в положении равновесия его потенциальная энергия была равна нулю.
При отклонении маятника на угол  (рис. 10), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:
(рис. 10), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:

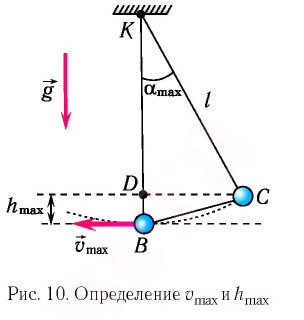
Поскольку при прохождении положения равновесия потенциальная энергия равна нулю  то из закона сохранения механической энергии следует (см. рис. 10), что
то из закона сохранения механической энергии следует (см. рис. 10), что  т. е. кинетическая энергия маятника (а следовательно, и скорость) рис. ю. Определение^иhmax будет максимальна:
т. е. кинетическая энергия маятника (а следовательно, и скорость) рис. ю. Определение^иhmax будет максимальна:
Запишем закон сохранения механической энергии, подставив в него выражения для потенциальной и кинетической энергии:

Отсюда найдем модуль максимальной скорости маятника:
Высоту  можно выразить через длину
можно выразить через длину  маятника и амплитуду
маятника и амплитуду  колебаний. Если колебания малые, то
колебаний. Если колебания малые, то  Из
Из  (см. рис. 10) находим:
(см. рис. 10) находим:

или 
Подставив выражение (3) для  в формулу (2), получим:
в формулу (2), получим:
Подставляя выражения (3) для  и (4) для
и (4) для  в соотношение (1), находим:
в соотношение (1), находим:

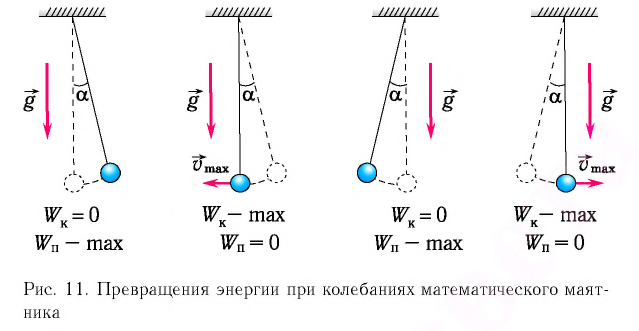
Таким образом, в положении равновесия потенциальная энергия полностью переходит в кинетическую, а в положениях максимального отклонения кинетическая энергия полностью переходит в потенциальную (рис. 11). В любом промежуточном положении

Покажем, что аналогичные превращения энергии имеют место и для пружинного маятника (рис. 12).
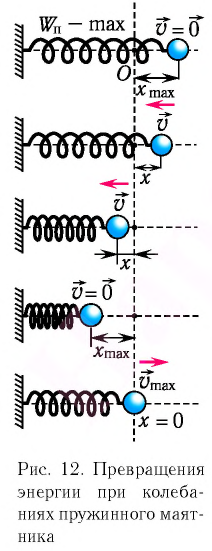
В крайних положениях, когда  модуль скорости маятника
модуль скорости маятника  и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
Таким образом, из соотношения (6) следует, что механическая энергия пружинного маятника пропорциональна квадрату амплитуды колебаний.
В положении равновесия, когда  вся энергия пружинного маятника переходит в кинетическую энергию груза:
вся энергия пружинного маятника переходит в кинетическую энергию груза:
где  — модуль максимальной скорости груза при колебаниях.
— модуль максимальной скорости груза при колебаниях.
В положениях между крайними точками полная энергия

С учетом выражений для координаты  и проекции скорости груза
и проекции скорости груза  а также для
а также для  находим его потенциальную энергию
находим его потенциальную энергию  и кинетическую энергию
и кинетическую энергию  в произвольный момент времени
в произвольный момент времени
Тогда полная механическая энергия пружинного маятника в этот же. момент времени есть величина постоянная и равная:
Таким образом, начальное смещение  определяет начальную потенциальную, а начальная скорость
определяет начальную потенциальную, а начальная скорость  определяет начальную кинетическую энергию колеблющегося тела. При отсутствии в системе потерь энергии процесс колебаний сопровождается только переходом энергии из потенциальной в кинетическую и обратно.
определяет начальную кинетическую энергию колеблющегося тела. При отсутствии в системе потерь энергии процесс колебаний сопровождается только переходом энергии из потенциальной в кинетическую и обратно.
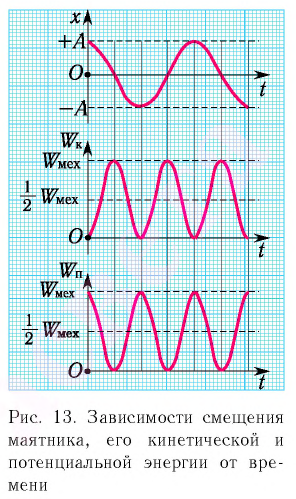
Заметим, что частота периодических изменений кинетической (потенциальной) энергии колеблющегося тела в два раза больше частоты колебаний маятника. Действительно, дважды за период механическая энергия тела будет полностью превращаться в потенциальную (в двух крайних положениях маятника) и дважды за период — в кинетическую (при его прохождении через положение равновесия) (рис. 13).
Пример №1
Математический маятник при колебаниях от одного крайнего положения до другого смещается на расстояние  см и при прохождении положения равновесия достигает скорости, модуль которой
см и при прохождении положения равновесия достигает скорости, модуль которой  Определите период
Определите период  колебании маятника.
колебании маятника.
Дано:

Решение
По закону сохранения механической энергии

Отсюда:

Ответ: 
Пример №2
Груз массой  г находится на гладкой горизонтальной поверхности и закреплен на легкой пружине жесткостью
г находится на гладкой горизонтальной поверхности и закреплен на легкой пружине жесткостью  Его смешают на расстояние
Его смешают на расстояние  см от положения равновесия и сообщают в направлении от положения равновесия скорость, модуль которой
см от положения равновесия и сообщают в направлении от положения равновесия скорость, модуль которой  Определите потенциальную
Определите потенциальную  и кинетическую
и кинетическую  энергию груза в начальный момент времени. Запишите кинематический закон движения груза.
энергию груза в начальный момент времени. Запишите кинематический закон движения груза.
Дано:

Решение Потенциальная энергия груза:
Кинетическая энергия груза:

Начальное смещение груза не является амплитудой, так как вместе с начальным отклонением грузу сообщили и скорость. Однако полная энергия может быть выражена через амплитуду колебаний:

Отсюда

Циклическая частота:
В начальный момент времени  координата груза
координата груза  Отсюда начальная фаза:
Отсюда начальная фаза:

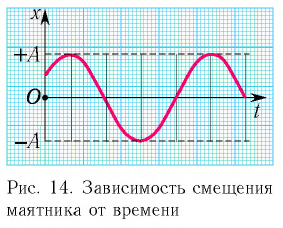
Тогда закон гармонических колебаний имеет вид (рис. 14):

Ответ: 

- Вынужденные колебания в физике
- Электромагнитные колебания
- Свободные и вынужденные колебания в физике
- Вынужденные электромагнитные колебания
- Закон Архимеда
- Движение жидкостей
- Уравнение Бернулли
- Механические колебания и волны в физике
Механическая колебательная система, состоящая из пружины с коэффициентом упругости (жёсткостью) (k), один конец которой жёстко закреплён, а на втором находится груз массы (m), называется пружинным маятником.

Рис. (1). Колебания пружинного маятника
Рассмотрим простейший пружинный маятник — движущееся по горизонтальной плоскости твёрдое тело (груз), прикреплённое пружиной к стене (рис. (1)). Допустим, что силы трения не оказывают существенного влияния на движение груза.
Первоначально пружина не деформирована (не растянута и не сжата), поэтому никакие силы в горизонтальном направлении на груз не действуют. Точка О — положение равновесия груза.
Переместим груз вправо. Пружина при этом растянется, и в ней возникнет сила упругости, направленная влево, к положению равновесия, и по модулю равная:
где (x=A) — максимальное (амплитудное) отклонение груза от положения равновесия.
Если отпустить груз, то под действием силы упругости он начнёт ускоренно перемещаться влево, к точке (О), по мере приближения к которой скорость груза будет возрастать от нуля до некоторого максимального значения. При приближении к точке равновесия деформация пружины уменьшается, а значит, уменьшается и сила упругости. Так как груз имеет скорость при прохождении положения равновесия, то он по инерции продолжает свое движение влево. Теперь пружина начинает сжиматься (деформация сжатия), что приводит к возникновению силы упругости, направленной вправо, т.е. к положению равновесия. По мере возрастания степени деформации пружины сила растет и все больше тормозит движение груза. В конце концов, груз останавливается.
Но сила упругости, направленная к точке (О), будет продолжать действовать, поэтому груз вновь придёт в движение в обратную сторону, вправо, и на обратном пути его скорость будет возрастать от нуля до максимального значения в точке (О).
Движение груза от точки (О) к крайней правой точке снова приведёт к растяжению пружины, опять возникнет сила упругости, направленная к положению равновесия и замедляющая движение груза до полной его остановки.
Мы описали одно полное колебание.
В каждой точке траектории, кроме положения равновесия, на груз действует сила упругости пружины, которая направлена к положению равновесия.
Второй закон Ньютона для такой системы при условии отсутствия внешних сил и сил трения имеет вид:
— ускорение пружинного маятника.
Обрати внимание!
Данная формула справедлива и для вертикального пружинного маятника (рис. (2)) в котором действуют сила тяжести груза и сила упругости пружины.

Рис. (2). Колебания вертикального пружинного маятника
Обрати внимание!
Ускорение тела, колеблющегося на пружине, не зависит от силы тяжести, действующей на это тело. Сила тяжести только приводит к первоначальному изменению (смещению вниз) положения равновесия (рис. (3)).

Рис. (3). Изображение смещения маятника
Период свободных колебаний пружинного маятника определяется по формуле Гюйгенса:
(m) — масса груза,
(k) — коэффициент жёсткости пружины.
Пружинные маятники широко используются в качестве акселерометра в системах управления баллистических ракет, контактных взрывателях артиллерийских и авиационных боеприпасов и т. п.
Акселерометр (лат. accelero — «ускоряю» и др.-греч. μετρέω — «измеряю») — прибор, измеряющий проекцию кажущегося ускорения (разности между истинным ускорением объекта и гравитационным ускорением). Как правило, акселерометр представляет собой чувствительную массу, закреплённую в упругом подвесе. Отклонение массы от её первоначального положения при наличии кажущегося ускорения несёт информацию о величине этого ускорения.

Рис. (4). Схема акселерометра
На рисунке (4) — схема простейшего акселерометра. Груз закреплён на пружине. Демпфер подавляет колебания груза. Чем больше кажущееся ускорение, тем сильнее деформируется пружина, изменяя показания прибора.
Источники:
Рис. 1. Колебания пружинного маятника. © ЯКласс.
Рис. 2. Колебания вертикального пружинного маятника. © ЯКласс.
Рис. 3. Изображение смещения маятника.
Рис. 4. Схема акселерометра.
Пружинный маятник, формулы и примеры
Определения и формулы пружинного маятника
Рис.1. Пружинный маятник: а) в положении равновесия; б) в состоянии колебаний
Когда пружина не деформирована, тело находится в положении равновесия (рис.1,а). Если растянув или сжав пружину, вывести тело из положения равновесия, на него будет действовать сила упругости со стороны деформированной пружины. Эта сила направлена к положению равновесия и в данном случае является возвращающей силой.
Сила упругости в пружинном маятнике
Сила упругости пропорциональна смещению тела (удлинению пружины):
здесь — коэффициент жесткости пружины.
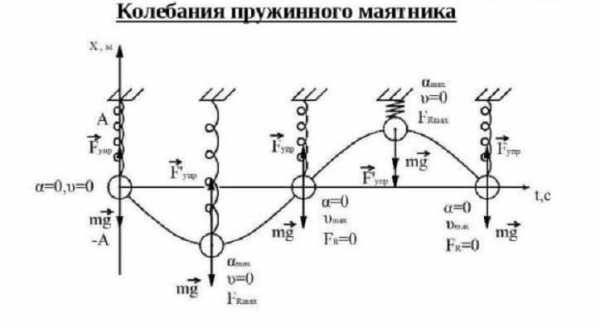
В положении, соответствующем максимальному отклонению тела от положения равновесия (смещение тела равно амплитуде колебаний) сила упругости максимальна, поэтому максимально и ускорение тела. По мере приближения тела к положению равновесия удлинение пружины уменьшается, и, следовательно, уменьшается ускорение тела, которое обусловлено силой упругости. Достигнув положения равновесия, тело не остановится, хотя в этот момент сила упругости равна нулю. Скорость тела в момент прохождения им положения равновесия имеет максимальное значение, и тело по инерции будет двигаться дальше, растягивая пружину. Возникающая при этом сила упругости будет тормозить тело, так как теперь она направлена в сторону, противоположную движению тела. Дойдя до крайнего положения, тело остановится и начнет движение в противоположном направлении. Движение тела будет повторяться в описанной последовательности.
Таким образом, причинами свободных колебаний пружинного маятника является сила упругости деформированной пружины (возвращающая сила) и инертность тела.
Период свободных колебаний пружинного маятника
Период свободных колебаний пружинного маятника определяется по формуле:
Примеры решения задач
| Понравился сайт? Расскажи друзьям! | |
ru.solverbook.com
Пружинные маятники: графики, скорости, пути.
В этой статье все задачи связаны с пружинным маятником. Мы научимся читать информацию о колебаниях по графику смещения, находить скорость по зависимости смещения от времени, записывать закон колебаний.
Задача 1. Во сколько раз отличаются периоды колебаний пружинных маятников одинаковой массы, составленных из двух пружин жесткостью и , соединенных один раз последовательно, а другой раз параллельно?
При последовательном соединении определим жесткость такого соединения:
Если на последовательное соединение воздействует сила , то первая пружина удлинится на , а вторая на , а вместе их удлинение составит величину
Тогда
Тогда период колебаний равен
При параллельном соединении пружин их жесткости складываются, поэтому период будет равен
Теперь определим отношение периодов:
Ответ:
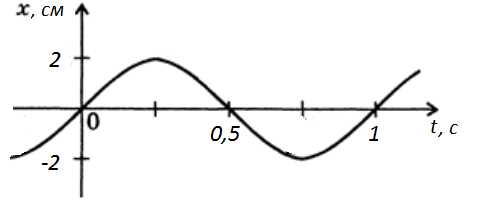
Задача 2. На пружине жесткостью Н/м подвешен груз массой г. Построить график зависимости смещения этого груза, если амплитуда А = 10 см, а в начальный момент времени груз проходил положение равновесия.
Определим период колебаний такой системы:
Тогда угловая частота будет равна
Теперь можно записать закон колебаний (колебания будут происходить по синусоидальному закону, так как если бы это был косинус – то тело бы находилось в начальный момент в самой дальней от положения равновесия точке):
Начальная фаза колебаний равна нулю – это следует из условия, что груз проходил положение равновесия в начальный момент времени.
Теперь можно и график построить:
К задаче 2
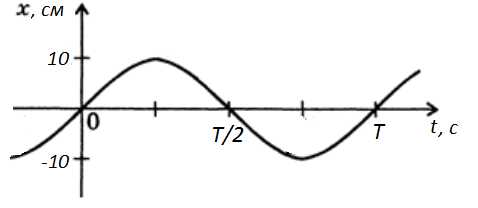
Задача 3. Груз массой 2 кг подвешен на пружине и совершает колебания, график которых приведен на рисунке . Определить жесткость пружины.
К задаче 3
Из графика определяем: м, с. Тогда
Откуда жесткость пружины равна
Ответ: Н/м.
Задача 4. Телу массой , подвешенному на пружине жесткостью , в положении равновесия сообщают скорость , направленную вертикально вниз. Определить путь, пройденный телом, за промежуток времени от до , считая возникающие колебания гармоническими.
Закон колебаний может быть записан:
Начальная фаза равна нулю, так как указано, что скорость сообщили телу в положении равновесия.
Скорость является производной координаты:
Так как скорость максимальна именно при прохождении телом положения равновесия, то . Следовательно, амплитуда колебаний
Путь – это разность координат и – это справедливо, так как движение от до происходит в одну сторону (на первой четверти периода).
Ответ: .
Задача 5. Тело, подвешенное на пружине, смещают из положения равновесия вертикально вниз на расстояние и отпускают. Определить путь, пройденный телом за промежуток времени от до , считая возникающие колебания гармоническими.
Максимальное смещение тела – амплитуда колебаний – равно .
Путь – это разность координат и – это справедливо, так как движение от до происходит в одну сторону (на второй четверти периода) Но на второй четверти тело уже возвращается обратно к положению равновесия, следовательно, координата его первоначального положения больше, чем координата последующего положения, тогда:
Ответ: .
easy-physic.ru
период и амплитуда колебани1, формула, жесткость
Работа большинства механизмов основана на простейших законах физики и математики. Довольно большое распространение получило понятие пружинного маятника. Подобный механизм получил весьма широкое распространение, так как пружина обеспечивает требуемую функциональность, может быть элементом автоматических устройств. Рассмотрим подробнее подобное устройство, принцип действия и многие другие моменты подробнее.

Определения пружинного маятника
Как ранее было отмечено, пружинный маятник получил весьма широкое распространение. Среди особенностей можно отметить следующее:
- Устройство представлено сочетанием груза и пружины, масса которой может не учитываться. В качестве груза может выступать самый различный объект. При этом на него может оказываться воздействие со стороны внешней силы. Распространенным примером можно назвать создание предохранительного клапана, который устанавливается в системе трубопровода. Крепление груза к пружине проводится самым различным образом. При этом используется исключительно классический винтовой вариант исполнения, который получил наиболее широкое распространение. Основные свойства во многом зависят от типа применяемого материала при изготовлении, диаметра витка, правильности центровки и многих других моментов. Крайние витки часто изготавливаются таким образом, чтобы могли воспринимать большую нагрузку при эксплуатации.
- До начала деформации полная механическая энергия отсутствует. При этом на тело не влияет сила упругости. Каждая пружина имеет исходное положение, которое она сохраняет на протяжении длительного периода. Однако, за счет определенной жесткости происходит фиксация тела в начальном положении. Имеет значение то, каким образом прикладывается усилие. Примером назовем то, что она должна быть направлена вдоль оси пружины, так как в противном случае есть вероятность появления деформации и многих других проблем. У каждой пружины есть свои определенный придел сжатия и растяжения. При этом максимальное сжатие представлено отсутствием зазора между отдельными витками, при растяжении есть момент, когда происходит невозвратная деформация изделия. При слишком сильном удлинении проволоки происходит изменение основных свойств, после чего изделие не возвращается в свое первоначальное положение.
- В рассматриваемом случае колебания совершаются за счет действия силы упругости. Она характеризуется довольно большим количество особенностей, которые должны учитываться. Воздействие упругости достигается за счет определенного расположения витков и типа применяемого материала при изготовлении. При этом сила упругости может действовать в обе стороны. Чаще всего происходит сжатие, но также может проводится растяжение – все зависит от особенностей конкретного случая.
- Скорость перемещения тела может варьировать в достаточно большом диапазоне, все зависит от того, какое оказывается воздействие. К примеру, пружинный маятник может перемещать подвешенный груз в горизонтальной и вертикальной плоскости. Действие направленного усилия во многом зависит от вертикальной или горизонтальной установки.
В целом можно сказать, что пружинный маятник определение довольно обобщенное. При этом скорость перемещения объекта зависит от различных параметров, к примеру, величины приложенного усилия и других моментов. Перед непосредственным проведением расчетов проводится создание схемы:
- Указывается опора, к которой крепится пружина. Зачастую для ее отображения рисуется линия с обратной штриховкой.
- Схематически отображается пружина. Она часта представлена волнистой линией. При схематическом отображении не имеет значение длина и диаметральный показатель.
- Также изображается тело. Оно не должно соответствовать размерам, однако имеет значение место непосредственного крепления.
Схема требуется для схематического отображения всех сил, которые оказывают влияние на устройство. Только в этом случае можно учесть все, что влияет на скорость перемещения, инерцию и многие другие моменты.
Пружинные маятники применяются не только при расчетах ил решении различных задач, но также и на практике. Однако, не все свойства подобного механизма применимы.
Примером можно назвать случай, когда колебательные движения не требуются:
- Создание запорных элементов.
- Пружинные механизмы, связанные с транспортировкой различных материалов и объектов.
Проводимые расчеты пружинного маятника позволяют подобрать наиболее подходящий вес тела, а также тип пружины. Она характеризуется следующими особенностями:
- Диаметр витков. Он может быть самым различным. От показателя диаметра во многом зависит то, сколько требуется материала для производства. Диаметр витков также определяет то, какое усилие должно прикладываться для полного сжатия или частичного растяжения. Однако, увеличение размеров может создать существенные трудности с установкой изделия.
- Диаметр проволоки. Еще одним важным параметром можно назвать диаметральный размер проволоки. Он может варьировать в широком диапазоне, зависит прочность и степень упругости.
- Длина изделия. Этот показатель определяет то, какое усилие требуется для полного сжатия, а также какой упругостью может обладать изделие.
- Тип применяемого материала также определяет основные свойства. Чаще всего пружина изготавливается при применении специального сплава, который обладает соответствующие свойствами.
При математических расчетах многие моменты не учитываются. Усилие упругости и многие другие показатели выявляются путем расчета.
Виды пружинного маятника
Выделяют несколько различных видов пружинного маятника. Стоит учитывать, что классификация может проводится по типу устанавливаемой пружины. Среди особенностей отметим:
- Довольно большое распространение получили вертикальные колебания, так как в этом случае на груз не оказывается сила трения и другое воздействие. При вертикальном расположении груза существенно увеличивается степень воздействия силы тяжести. Распространен этот вариант исполнения при проведении самых различных расчетов. За счет силы тяжести есть вероятность того, что тело в исходной точке будет совершать большое количество инерционных движений. Этому также способствует упругость и инерция движения тела в конце хода.
- Также применяется горизонтальный пружинный маятник. В этом случае груз находится на опорной поверхности и на момент перемещения также возникает трение. При горизонтальном расположении сила тяжести работает несколько иначе. Горизонтальное расположение тела получило широкое распространение в различных задачах.
Рассчитывается движение пружинного маятника можно при использовании достаточно большого количества различных формул, который должны учитывать воздействие всех сил. В большинстве случаев устанавливается классическая пружина. Среди особенностей отметим следующее:
- Классическая витая пружина сжатия сегодня получила весьма широкое распространение. В этом случае между витками есть пространство, которое называется шагом. Пружина сжатия может и растягиваться, но зачастую она для этого не устанавливается. Отличительной особенностью можно назвать то, что последние витки выполнены в виде плоскости, за счет чего обеспечивается равномерное распределения усилия.
- Может устанавливаться вариант исполнения для растяжения. Он рассчитан на установку в случае, когда приложенное усилие становится причиной увеличения длины. Для крепления проводится размещение крючков.
Распространены оба варианта исполнения. При этом важно уделить внимание тому, чтобы сила прикладывалась параллельно оси. В противном случае есть вероятность смещения витков, что становится причиной возникновения серьезных проблем, к примеру, деформации.
Сила упругости в пружинном маятнике
Следует учитывать тот момент, что до деформирования пружины она находится в положении равновесия. Приложенная сила может приводить к ее растягиванию и сжиманию. Сила упругости в пружинном маятнике рассчитывается в соответствии с тем, как воздействует закон сохранения энергии. Согласно принятым нормам возникающая упругость пропорциональна смещению тела. В этом случае кинетическая энергия рассчитывается по формуле: F=-kx. В данном случае применяется коэффициент жесткости пружины.
Выделяют довольно большое количество особенностей воздействия силы упругости в пружинном маятнике. Среди особенностей отметим:
- Максимальная сила упругости возникает на момент, когда тело находится на максимальном расстоянии от положения равновесия. При этом в подобном положении отмечается максимальное значение ускорение тела. Не следует забывать о том, что может проводится растягивание и сжатие пружины, оба варианта несколько отличается. При сжатии минимальная длина изделия ограничивается. Как правило, она имеет длину, равную диаметру витка умноженное на количество. Слишком большое усилие может стать причиной смещения витков, а также деформации проволоки. При растяжении есть момент удлинения, после которого происходит деформация. Сильное удлинение приводит к тому, что возникающей силы упругости недостаточно для возврата изделия в первоначальное состояние.
- При сближении тела к месту равновесия происходит существенное уменьшение длины пружины. За счет этого наблюдается постоянное снижение показателя ускорения. Все это происходит за счет воздействия усилия упругости, которая связано с типом применяемого материала при изготовлении пружины и ее особенностями. Длина уменьшается за счет того, что расстояние между витками снижается. Особенностью можно назвать равномерное распределение витков, лишь только в случае дефектов есть вероятность нарушения подобного правила.
- На момент достижения точки равновесия сила упругости снижается до нуля. Однако, скорость не снижается, так как тело движется по инерции. Точка равновесия характеризуется тем, что длина изделия в ней сохраняется на протяжении длительного периода при условии отсутствия внешнего деформирующего усилия. Точка равновесия определяется в случае построения схемы.
- После достижения точки равновесия возникающая упругость начинает снижать скорость перемещения тела. Она действует в противоположном направлении. При этом возникает усилие, которое направлено в обратную сторону.
- Дойдя крайней точки тело начинает двигаться в противоположную сторону. В зависимости от жесткости установленной пружины подобное действие будет повторятся неоднократно. Протяженность этого цикла зависит от самых различных моментов. Примером можно назвать массу тела, а также максимальное приложенное усилие для возникновения деформации. В некоторых случаях колебательные движения практически незаметны, но они все же возникают.
Приведенная выше информация указывает на то, что колебательные движения совершаются за счет воздействия упругости. Деформация происходит за счет приложенного усилия, которое может варьировать в достаточно большом диапазоне, все зависит от конкретного случая.
Уравнения колебаний пружинного маятника
Колебания пружинного маятника совершаются по гармоническому закону. Формула, по которой проводится расчет, выглядит следующим образом: F(t)=ma(t)=-mw2x(t).
В приведенной выше формуле указывается (w) радиальная частота гармонического колебания. Она свойственна силе, которая распространяется в границах применимости закона Гука. Уравнение движения может существенно отличаться, все зависит от конкретного случая.
Если рассматривать колебательное движение, то следует уделить внимание следующим моментам:
- Колебательные движения наблюдаются только в конце перемещения тела. Изначально оно прямолинейное до полного освобождения усилия. При этом сила упругости сохраняется на протяжении всего времени, пока тело находится в максимально отдаленном положении от нуля координат.
- После растяжения тело возвращается в исходное положение. Возникающая инерция становится причиной, по которой может оказываться воздействие на пружину. Инерция во многом зависит от массы тела, развитой скорости и многих других моментов.

В результате этого возникает колебание, которое может длиться в течение длительного периода. Приведенная выше формула позволяет провести расчет с учетом всех моментов.
Формулы периода и частоты колебаний пружинного маятника
При проектировании и вычислении основных показателей также уделяется довольно много внимания частоте и периоду колебания. Косинус – периодическая функция, в которой применяется значение, неизменяемое через определенный промежуток времени. Именно этот показатель называют период колебаний пружинного маятника. Для обозначения этого показателя применяется буква Т, также часто используется понятие, характеризующее значение, обратное периоду колебания (v). В большинстве случаев при расчетах применяется формула T=1/v.
Период колебаний вычисляется по несколько усложненной формуле. Она следующая: T=2п√m/k. Для определения частоты колебания используется формула: v=1/2п√k/m.
Рассматриваемая циклическая частота колебаний пружинного маятника зависит от следующих моментов:
- Масса груза, который прикреплен к пружине. Этот показатель считается наиболее важным, так как оказывает влияние на самые различные параметры. От массы зависит сила инерции, скорость и многие другие показатели. Кроме этого, масса груза – величина, с измерением которой не возникает проблем из-за наличия специального измерительного оборудования.
- Коэффициент упругости. Для каждой пружины этот показатель существенно отличается. Коэффициент упругости указывается для определения основных параметров пружины. Зависит этот параметр от количества витков, длины изделия, расстояние между витками, их диаметра и многого другого. Определяется он самым различным образом, зачастую при применении специального оборудования.
Не стоит забывать о том, что при сильном растяжении пружины закон Гука прекращает действовать. При этом период пружинного колебания начинает зависеть от амплитуды.
Для измерения периода применяется всемирная единица времени, в большинстве случаев секунды. В большинстве случаев амплитуда колебаний вычисляется при решении самых различных задач. Для упрощения процесса проводится построение упрощенной схемы, на которой отображаются основные силы.
Формулы амплитуды и начальной фазы пружинного маятника
Определившись с особенностями проходимых процессов и зная уравнение колебаний пружинного маятника, а также начальные значения можно провести расчет амплитуды и начальной фазы пружинного маятника. Для определения начальной фазы применяется значение f, амплитуда обозначается символом A.
Для определения амплитуды может использоваться формула: А=√x2+v2/w2. Начальная фаза высчитывается по формуле: tgf=-v/xw.
Применяя эти формулы можно провести определение основных параметров, которые применяются при расчетах.
Энергия колебаний пружинного маятника
Рассматривая колебание груза на пружине нужно учитывать тот момент, что при движение маятника может описываться двумя точками, то есть оно носит прямолинейный характер. Этот момент определяет выполнение условий, касающихся рассматриваемой силы. Можно сказать, что полная энергия потенциальная.
Провести расчет энергии колебаний пружинного маятника можно при учете всех особенностей. Основными моментами назовем следующее:
- Колебания могут проходить в горизонтальной и вертикальной плоскости.
- Ноль потенциальной энергии выбирается в качестве положения равновесия. Именно в этом месте устанавливается начало координат. Как правило, в этом положении пружина сохраняет свою форму при условии отсутствия деформирующей силы.
- В рассматриваемом случае рассчитываемая энергия пружинного маятника не учитывает силу трения. При вертикальном расположении груза сила трения несущественна, при горизонтальном тело находится на поверхности и при движении может возникнуть трение.
- Для расчета энергии колебания применяется следующая формула: E=-dF/dx.
Приведенная выше информация указывают на то, что закон сохранения энергии выглядит следующим образом: mx2/2+mw2x2/2=const. Применяемая формула говорит о следующем:
- Максимальная кинетическая энергия установленного маятника прямо пропорциональна максимальному значению потенциальной.
- На момент осциллятора среднее значение обоих сил равны.
Провести определение энергии колебания пружинного маятника можно при решении самых различных задач.
Свободные колебания пружинного маятника
Рассматривая то, чем вызваны свободные колебания пружинного маятника следует уделить внимание действию внутренних сил. Они начинают формироваться практически сразу после того, как телу было передано движение. Особенности гармонических колебаний заключаются в нижеприведенных моментах:
- Могут также возникать и другие типы сил воздействующего характера, который удовлетворяют все нормы закона, называются квазиупругими.
- Основными причинами действия закона могут быть внутренние силы, которые формируются непосредственно на момент изменения положения тела в пространстве. При этом груз обладает определенной массой, усилие создается за счет фиксации одного конца за неподвижный объект с достаточной прочностью, второго за сам груз. При условии отсутствия трения тело может совершать колебательные движения. В этом случае закрепленный груз называется линейным.
Не стоит забывать о том, что существует просто огромное количество различных видов систем, в которых осуществляется движение колебательного характера. В них также возникает упругая деформация, которая становится причиной применения для выполнения какой-либо работы.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
stankiexpert.ru
Формулы пружинного маятника в физике
Определение и формулы пружинного маятника
Определение
Пружинным маятником называют систему, которая состоит из упругой пружины, к которой прикреплен груз.
Допустим, что масса груза равна $m$, коэффициент упругости пружины $k$. Масса пружины в таком маятнике обычно не учитывается. Если рассматривать вертикальные движения груза (рис.1), то он движется под действием силы тяжести и силы упругости, если систему вывели из состояния равновесия и предоставили самой себе.
Уравнения колебаний пружинного маятника
Пружинный маятник, совершающий свободные колебания является примером гармонического осциллятора. Допустим, что маятник совершает колебания вдоль оси X. Если колебания малые, выполняется закон Гука, то уравнение движения груза имеет вид:
[ddot{x}+{omega }^2_0x=0left(1right),]
где ${щu}^2_0=frac{k}{m}$ — циклическая частота колебаний пружинного маятника. Решением уравнения (1) является функция:
[x=A{cos left({omega }_0t+varphi right)=A{sin left({omega }_0t+{varphi }_1right) } }left(2right),]
где ${omega }_0=sqrt{frac{k}{m}}>0$- циклическая частота колебаний маятника, $A$ — амплитуда колебаний; ${(omega }_0t+varphi )$ — фаза колебаний; $varphi $ и ${varphi }_1$ — начальные фазы колебаний.
В экспоненциальном виде колебания пружинного маятника можно записать как:
[Re tilde{x}=Releft(Acdot exp left(ileft({omega }_0t+varphi right)right)right)left(3right).]
Формулы периода и частоты колебаний пружинного маятника
Если в упругих колебаниях выполняется закон Гука, то период колебаний пружинного маятника вычисляют при помощи формулы:
[T=2pi sqrt{frac{m}{k}}left(4right).]
Так как частота колебаний ($nu $) — величина обратная к периоду, то:
[nu =frac{1}{T}=frac{1}{2pi }sqrt{frac{k}{m}}left(5right).]
Формулы амплитуды и начальной фазы пружинного маятника
Зная уравнение колебаний пружинного маятника (1 или 2) и начальные условия можно полностью описать гармонические колебания пружинного маятника. Начальные условия определяют амплитуда ($A$) и начальная фаза колебаний ($varphi $).
Амплитуду можно найти как:
[A=sqrt{x^2_0+frac{v^2_0}{{omega }^2_0}}left(6right),]
начальная фаза при этом:
[tg varphi =-frac{v_0}{x_0{omega }_0}left(7right),]
где $v_0$ — скорость груза при $t=0 c$, когда координата груза равна $x_0$.
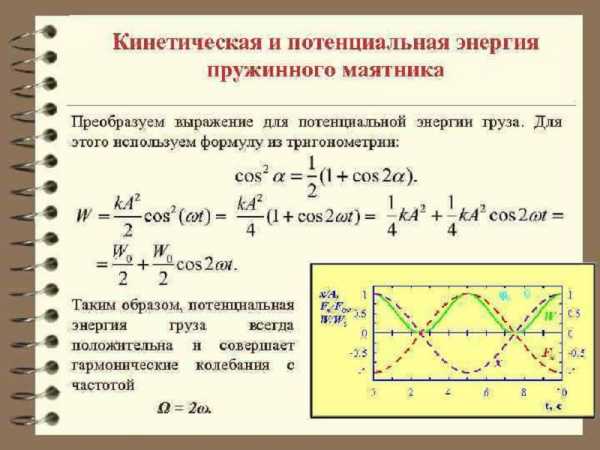
Энергия колебаний пружинного маятника
При одномерном движении пружинного маятника между двумя точками его движения существует только один путь, следовательно, выполняется условие потенциальности силы (любую силу можно считать потенциальной, если она зависит только от координат). Так как силы, действующие на пружинный маятник потенциальны, то можно говорить о потенциальной энергии.
Пусть пружинный маятник совершает колебания в горизонтальной плоскости (рис.2). За ноль потенциальной энергии маятника примем положение его равновесия, где поместим начало координат. Силы трения не учитываем. Используя формулу, связывающую потенциальную силу и потенциальную энергию для одномерного случая:
[E_p=-frac{dF}{dx}(8)]
учитывая, что для пружинного маятника $F=-kx$,
тогда потенциальная энергия ($E_p$) пружинного маятника равна:
[E_p=frac{kx^2}{2}=frac{m{{omega }_0}^2x^2}{2}left(9right).]
Закон сохранения энергии для пружинного маятника запишем как:
[frac{m{dot{x}}^2}{2}+frac{m{{omega }_0}^2x^2}{2}=const left(10right),]
где $dot{x}=v$ — скорость движения груза; $E_k=frac{m{dot{x}}^2}{2}$ — кинетическая энергия маятника.
Из формулы (10) можно сделать следующие выводы:
- Максимальная кинетическая энергия маятника равна его максимальной потенциальной энергии.
- Средняя кинетическая энергия по времени осциллятора равна его средней по времени потенциальной энергии.
Примеры задач с решением
Пример 1
Задание. Маленький шарик, массой $m=0,36$ кг прикреплен к горизонтальной пружине, коэффициент упругости которой равен $k=1600 frac{Н}{м}$. Каково было начальное смещение шарика от положения равновесия ($x_0$), если он при колебаниях проходит его со скоростью $v=1 frac{м}{с}$?
Решение. Сделаем рисунок.
По закону сохранения механической энергии (так как считаем, что сил трения нет), запишем:
[E_{pmax}=E_{kmax }left(1.1right),]
где $E_{pmax}$ — потенциальная энергия шарика при его максимальном смещении от положения равновесия; $E_{kmax }$ — кинетическая энергия шарика, в момент прохождения положения равновесия.
[E_{kmax }=frac{mv^2}{2}left(1.2right).]
Потенциальная энергия равна:
[E_{pmax}=frac{k{x_0}^2}{2}left(1.3right).]
В соответствии с (1.1) приравняем правые части (1.2) и (1.3), имеем:
[frac{mv^2}{2}=frac{k{x_0}^2}{2}left(1.4right).]
Из (1.4) выразим искомую величину:
[x_0=vsqrt{frac{m}{k}}.]
Вычислим начальное (максимальное) смещение груза от положения равновесия:
[x_0=1cdot sqrt{frac{0,36}{1600}}=1,5 cdot {10}^{-3}(м).]
Ответ. $x_0=1,5$ мм
Пример 2
Задание. Пружинный маятник совершает колебания по закону: $x=A{cos left(omega tright), } $где $A$ и $omega $ — постоянные величины. Когда возвращающая сила в первый раз достигает величины $F_0,$ потенциальная энергия груза равна $E_{p0}$.
В какой момент времени это произойдет?
Решение. Возвращающей силой для пружинного маятника является сила упругости, равная:
[F=-kx=-kA{cos left(omega tright)left(2.1right). }]
Потенциальную энергию колебаний груза найдем как:
[E_p=frac{kx^2}{2}=frac{kA^2{{cos }^2 left(omega tright) }}{2}left(2.2right).]
В момент времени, который следует найти $F=F_0$; $E_p=E_{p0}$, значит:
[frac{E_{p0}}{F_0}=-frac{A}{2}{cos left(omega tright) }to t=frac{1}{omega } arc{cos left(-frac{2E_{p0}}{AF_0}right) }.]
Ответ. $t=frac{1}{omega } arc{cos left(-frac{2E_{p0}}{AF_0}right) }$
Читать дальше: формулы равноускоренного прямолинейного движения.
www.webmath.ru
как найти скорость и ускорение пружинного маятника
Вы искали как найти скорость и ускорение пружинного маятника? На нашем сайте вы можете получить ответ на любой математический вопрос. Подробное
решение с описанием и пояснениями поможет вам разобраться даже с самой сложной задачей и колебания пружинного маятника, не
исключение. Мы поможем вам подготовиться к домашним работам, контрольным, олимпиадам, а так же к поступлению
в вуз.
И какой бы пример, какой бы запрос по математике вы не ввели — у нас уже есть решение.
Например, «как найти скорость и ускорение пружинного маятника».
Применение различных математических задач, калькуляторов, уравнений и функций широко распространено в нашей
жизни. Они используются во многих расчетах, строительстве сооружений и даже спорте. Математику человек
использовал еще в древности и с тех пор их применение только возрастает. Однако сейчас наука не стоит на
месте и мы можем наслаждаться плодами ее деятельности, такими, например, как онлайн-калькулятор, который
может решить задачи, такие, как как найти скорость и ускорение пружинного маятника,колебания пружинного маятника,период колебания пружинного маятника формула,период пружинного маятника формула,пружинного маятника формулы,пружинный маятник,пружинный маятник формулы,формула амплитуды колебаний пружинного маятника,формула периода колебаний пружинного маятника,формула периода колебания пружинного маятника,формула периода пружинного маятника,формула пружинного маятника,формула частоты колебаний пружинного маятника,частота колебаний пружинного маятника формула,частота пружинного маятника формула. На этой странице вы найдёте калькулятор,
который поможет решить любой вопрос, в том числе и как найти скорость и ускорение пружинного маятника. Просто введите задачу в окошко и нажмите
«решить» здесь или введите в окно ввода ниже свой запрос (например, период колебания пружинного маятника формула).
Где можно решить любую задачу по математике, а так же как найти скорость и ускорение пружинного маятника Онлайн?
Решить задачу как найти скорость и ускорение пружинного маятника вы можете на нашем сайте https://pocketteacher.ru. Бесплатный
онлайн решатель позволит решить онлайн задачу любой сложности за считанные секунды. Все, что вам необходимо
сделать — это просто
ввести свои данные в решателе. Так же вы можете посмотреть видео инструкцию и узнать, как правильно ввести
вашу задачу на нашем сайте. А если у вас остались вопросы, то вы можете задать их в чате снизу слева на этой
странице.
www.pocketteacher.ru
1.2. Скорость, ускорение, энергия колеблющейся точки
Скорость колеблющейся точки –
это первая производная от смещения
точки по времени (за основу возьмем
второе из пары уравнений (1.1)):
.
(1.4)
Здесь max
= Aω0—максимальнаяскорость,илиамплитуда скорости.
Ускорение – это втоpая пpоизводная
от смещения точки по времени:
(1.5)
где amax = Aω02
—максимальное ускорение,илиамплитуда ускорения.
Из формул (1.1), (1.4) и (1.5) видно, что смещение,
скорость и ускорение не совпадают
по фазе (pис. 1.2). В моменты вpемени,
когда смещение максимально, скоpость
pавна нулю, а ускоpение пpинимает
максимальное отpицательное значение.
Смещение и ускоpение находятся впpотивофазе— так говоpят, когда
pазность фаз pавна.
Ускоpение всегда напpавлено в стоpону,
пpотивоположную смещению.
Полная энергия колебаний равна
сумме кинетической и потенциальной
энеpгий колеблющейся точки:
W = Wк
+ Wп = m
2 / 2 + kx2 /
2.
Подставим в это выражение формулы (1.4)
и (1.1) с учетом k = mω02(как будет показано ниже), получим
W = k A2
/ 2 =m A2 ω02
/2. (1.6)
Из сопоставления графиков функций
х(t), Wк(t)
и Wп(t)
(рис.1.3) видно, что частота колебаний
энергии в два раза больше частоты
колебаний смещения.
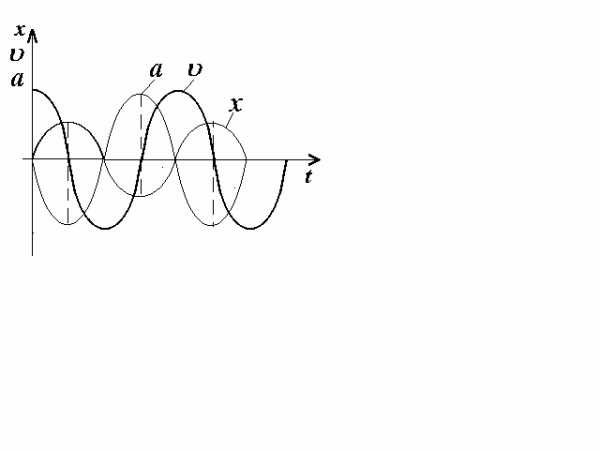
Рис. 1.2
Рис.
1.3
Cреднее значение
потенциальной и кинетической энергии
за периодТравно половине полной
энергии (рис. 1.3):
П р и м е р 1. Материальная точка
массой 5 г совершает колебания согласно
уравнению
гдеx – смещение, см.
Определить максимальную силу и полную
энергию.
Р е ш е н и е. Максимальная сила
выражается формулойгде (см. формулу (1.5)). ТогдаFmax=mAω02.
(см. формулу (1.5)). ТогдаFmax=mAω02.
Из уравнения колебания следует, что Подставим числовые значения:Fmax=5∙10-3
Подставим числовые значения:Fmax=5∙10-3
0,1∙4 = 2∙10-3Н = 2мН.
Полная энергия
 В итогеE= 0,5∙5∙10-3∙4∙10-2= 10-4Дж.
В итогеE= 0,5∙5∙10-3∙4∙10-2= 10-4Дж.
1.3. Диффеpенциальное
уpавнение
Свободных незатухающих колебаний. Маятники
Система, состоящая из тела массой m,
подвешенного к пружине, второй конец
которой закреплён, называютпружинным
маятником(рис. 1.4). Такая система
служит модельюлинейного осциллятора.
Если растянуть (сжать) пружину на величину
х, то возникнет упругая сила, которая
стремится вернуть тело в положение
равновесия. При небольших деформациях
справедлив закон Гука:F = — kx, гдеk— коэффициент жесткости пpужины. Запишем
второй закон Ньютона:
ma = — kx. (1.7)
Знак «минус» означает, что сила
упругости направлена в сторону,
противоположную смещению x.Подставим в это уpавнение ускоpениеaколеблющейся точки из уpавнения (1.5),
получим
— m ω02 x = —
k x,
откудаk = m ω02, Пеpиод колебаний
 (1.8)
(1.8)
Таким образом, период колебаний не
зависит от амплитуды.
П р и м е р 2. Под действием силы
тяжести груза пружина растянулась на
5 см. После вывода ее из состояния покоя
груз совершает гармонические колебания.
Определить период этих колебаний.
Р е ш е н и е. Период колебаний
пружинного маятника находим по формуле
(1.8). Коэффициент жесткости пружины
рассчитаем по закону Гука, исходя из
того, что пружина растягивается под
действием силы тяжести:mg
= — kx, откуда модульk = mg/x.
Подставимkв формулу
(1.8):
Выполним вычисления и вывод единицы
измерения:
Из формулы (1.7) следует дифференциальное
уравнение гармонических колебаний:
 или
или
Заменив отношение k/m = ω02
, получимдифференциальное уравнениесобственных незатухающих колебаний в
виде
(1.9)
Его решениями являются выражения (1.1).
П р и м е р 3. Дифференциальное
уравнение незатухающих гармонических
колебаний имеет вид .
.
Найти частоту и период этих колебаний.
Р е ш е н и е. Запишем уравнение в
виде: .
.
Отсюда
следует, что а
а Период колебаний определяется по
Период колебаний определяется по
формуле:Следовательно,Т= 2∙3,14/2 = 3,14 с.
Физическим маятникомназывают
твёрдое тело, которое совершает колебания
под действием силы тяжести вокруг
неподвижной горизонтальной оси (рис.
1.5), проходящей через точкуО, не
совпадающую с центром массС тела.
Момент силы тяжести mgотносительно
оси вращенияО
,
где
 —
—
длина физическогомаятника(pасстояние от точки подвеса до центpа
масс маятника
 = OC).
= OC).
По основному закону динамики вpащательного
движения I
= M,
 ЗдесьI– момент
ЗдесьI– момент
инерции маятника относительно оси,
проходящей через точку подвесаО,
— угловое ускорение.
Для малых отклонений sin = ,
тогда
 (1.10)
(1.10)
Из сравнения уравнений (1.9) и (1.10) следует,
что
и пеpиод колебаний
 (1.11)
(1.11)
Математический
маятникпредставляет
собой материальную точку массойm,
подвешенную на абсолютно упругой
нерастяжимой нити и совершающую
колебания под действием силы тяжести
(рис. 1.6).
В формулу (1.11) подставим момент инерции
материальной точки относительно оси,
проходящей через точку подвеса,
 ,
,
получим
Рис. 1.6
. (1.12)
Из выражений (1.11) и (1.12) следует, что
физический маятник имеет такой же период
колебаний, как и математический с длиной
.
Эту величину называют приведённой длинойфизического маятника.
Отметим, чтоI— момент
инеpцииотносительнооси, пpоходящей
чеpез точку подвесаO. По теоpеме
Штейнеpа
где IC
— момент инеpцииотносительно
оси,пpоходящей чеpез центp массмаятника. Пpедставим пpиведенную длину
маятника в виде
откуда видно, что пpиведенная длина
физического маятника больше его длины
Если от точки подвеса О отложить (см. рис. 1.5), то найдём точкуО1,
(см. рис. 1.5), то найдём точкуО1,
которая называетсяцентром качания.
Точка подвеса и центр качания являются
сопряженными. Это значит, что маятник,
подвешенный за центр качанияО1,
не изменит периода колебаний, а точкаOсделается новым центром качания.
П р и м е р 4. Однородный стержень
длинойb совершает
колебания в вертикальной плоскости
вокруг оси, проходящей через один из
его концов (рис.1.7). Определить период
колебаний.
Ре ш е н и е. Воспользуемся формулой
для определения периода колебаний
физического маятника (1.11), гдеℓ=ОС– расстояние от оси вращения до
центра масс. Это расстояниеℓ=b/2
(рис. 1.7). Момент инерции стержня
относительно его концаI=1/3mb2. Следовательно,
Сила, возвpащающая маятник в положение
pавновесия (рис. 1.6),
т. е. пpопоpциональна смещениюx, но
эта сила не упpугая по своей пpиpоде,
поэтому она называетсяквазиупругой.
Таким образом, механические гармонические
колебания возникают в системах под
действием сил, пропорциональных смещению.
studfiles.net
Пружинный маятник | Объединение учителей Санкт-Петербурга
|
Колебания пружинного маятника. |
|
|
В вертикальном положении на груз на пружине действуют сила тяжести и сила упругости пружины. Под действием силы тяжести пружина растягивается на х1, а затем мы отклоняем его от этого положения на х. |
|
|
Тогда согласно второму закону Ньютона, учитывая знаки проекций, получим: . Но , тогда: . Или — ускорение тела, колеблющегося на пружине, не зависит от силы тяжести, действующей на это тело. Сила тяжести только приводит к изменению положения равновесия. |
|
|
Выразим ускорение:. |
|
|
Сравним полученное уравнение с уравнением колебательного движения . Видно, что или — циклическая частота при колебаниях пружинного маятника. |
|
|
Период колебаний или (формула Гюйгенса). |
Формула Гюйгенса: |
|
Аналогичные вычисления можно проделать с помощью закона сохранения энергии. Учтем, что потенциальная энергия упруго деформированного тела равна, а полная механическая энергия равна максимальной потенциальной или кинетической. |
|
|
Запишем закон сохранения энергии и возьмем производную от левой и правой частей уравнения:. Т.к. производная от постоянной величины равна нулю, то . Производная суммы равна сумме производных: и . Следовательно:, а значит . |
|
|
В данном случае этот способ более трудоемкий, но он более общий. |
www.eduspb.com