Синус, косинус и тангенс острого угла прямоугольного треугольника
Изучение тригонометрии мы начнем с прямоугольного треугольника. Определим, что такое синус и косинус, а также тангенс и котангенс острого угла. Это основы тригонометрии.
Напомним, что прямой угол — это угол, равный 90 градусов. Другими словами, половина развернутого угла.
Острый угол — меньший 90 градусов.
Тупой угол — больший 90 градусов. Применительно к такому углу «тупой» — не оскорбление, а математический термин 

Нарисуем прямоугольный треугольник. Прямой угол обычно обозначается C. Обратим внимание, что сторона, лежащая напротив угла, обозначается той же буквой, только маленькой. Так, сторона, лежащая напротив угла A, обозначается  .
.
Угол A обозначается соответствующей греческой буквой  .
.

Гипотенуза прямоугольного треугольника — это сторона, лежащая напротив прямого угла.
Катеты — стороны, лежащие напротив острых углов.
Катет , лежащий напротив угла , называется противолежащим (по отношению к углу ). Другой катет  , который лежит на одной из сторон угла , называется прилежащим.
, который лежит на одной из сторон угла , называется прилежащим.
Синус острого угла в прямоугольном треугольнике — это отношение противолежащего катета к гипотенузе:
sin A
Косинус острого угла в прямоугольном треугольнике — отношение прилежащего катета к гипотенузе:
cos A
Тангенс острого угла в прямоугольном треугольнике — отношение противолежащего катета к прилежащему:
tg A 
Другое (равносильное) определение: тангенсом острого угла называется отношение синуса угла к его косинусу:
tg A
Котангенс острого угла в прямоугольном треугольнике — отношение прилежащего катета к противолежащему (или, что то же самое, отношение косинуса к синусу):
ctg A 
Обратите внимание на основные формулы для синуса, косинуса, тангенса и котангенса, которые приведены ниже. Они пригодятся нам при решении задач.

sin  |
sin cos cos |
 |
cos  |
1+tg  |
cos = sin  |
tg  |
1+ctg  |
sin = cos |
ctg  |
tg = ctg |
Давайте докажем некоторые из них.
- Сумма углов любого треугольника равна
 . Значит, сумма двух острых углов прямоугольного треугольника равнa .
. Значит, сумма двух острых углов прямоугольного треугольника равнa . - С одной стороны, как отношение противолежащего катета к гипотенузе. С другой стороны, , поскольку для угла катет а будет прилежащим. Получаем, что . Иными словами, .
- Возьмем теорему Пифагора: . Поделим обе части на получаем то есть
Мы получили основное тригонометрическое тождество. - Поделив обе части основного тригонометрического тождества на , получим: Это значит, что если нам дан тангенс острого угла , то мы сразу можем найти его косинус. Аналогично,



 = sin A")
 получаем
получаем ^2+left ( frac{b}{c} right )^2=left ( frac{c}{c} right )^2 ,") то есть
то есть 



Хорошо, мы дали определения и записали формулы. А для чего все-таки нужны синус, косинус, тангенс и котангенс?
Мы знаем, что сумма углов любого треугольника равна  .
.
Знаем соотношение между сторонами прямоугольного треугольника. Это теорема Пифагора:  .
.
Получается, что зная два угла в треугольнике, можно найти третий. Зная две стороны в прямоугольном треугольнике, можно найти третью. Значит, для углов — свое соотношение, для сторон — свое. А что делать, если в прямоугольном треугольнике известен один угол (кроме прямого) и одна сторона, а найти надо другие стороны?

С этим и столкнулись люди в прошлом, составляя карты местности и звездного неба. Ведь не всегда можно непосредственно измерить все стороны треугольника.
Синус, косинус и тангенс — их еще называют тригонометрическими функциями угла — дают соотношения между сторонами и углами треугольника. Зная угол, можно найти все его тригонометрические функции по специальным таблицам. А зная синусы, косинусы и тангенсы углов треугольника и одну из его сторон, можно найти остальные.
Мы тоже нарисуем таблицу значений синуса, косинуса, тангенса и котангенса для «хороших» углов от  до
до  .
.
 |
0 |  |
 |
 |
 |
| sin |
0 |  |
 |
 |
 |
| cos |
|
|
|
|
0 |
| tg |
0 |  |
|
 |
− |
| ctg |
− | |
|
|
0 |
Обратите внимание на два прочерка в таблице. При соответствующих значениях углов тангенс и котангенс не существуют.
Докажем теорему:
Если острый угол одного прямоугольного треугольника равен острому углу другого прямоугольного треугольника, то синусы этих углов равны, косинусы этих углов равны и тангенсы этих углов равны.
В самом деле, пусть АВС и  — два прямоугольных треугольника с прямыми углами С и
— два прямоугольных треугольника с прямыми углами С и  и равными острыми углами А и
и равными острыми углами А и 

Треугольники АВС и подобны по первому признаку подобия треугольников, поэтому 
Из этих равенств следует, что  т. е. sin А = sin
т. е. sin А = sin
Аналогично,  т. е. cos А = cos
т. е. cos А = cos и
и  т. е. tg A = tg
т. е. tg A = tg
Это значит, что синус, косинус и тангенс зависят только от величины угла.
Разберем несколько задач по тригонометрии из Банка заданий ФИПИ.
Задача 1. В треугольнике ABC угол C равен , sin A = 0,1. Найдите cos B.
Задача решается за четыре секунды.
Поскольку  , sin A = cos B = 0,1.
, sin A = cos B = 0,1.
Задача 2. В треугольнике  угол
угол  равен ,
равен ,  ,
,  .
.
Найдите  .
.

Решение:

Отсюда

Найдем AC по теореме Пифагора.

Ответ: 4,8.
Задача 3. В треугольнике АВС угол С равен  AВ = 13, ВС = 5. Найдите косинус и тангенс острого угла А. Ответ округлите до сотых.
AВ = 13, ВС = 5. Найдите косинус и тангенс острого угла А. Ответ округлите до сотых.
Решение:

Для угла А противолежащий катет – это ВС,
АВ является гипотенузой треугольника, лежит против  Значит, sin A
Значит, sin A 
Катет, прилежащий к  – это катет АС, следовательно, cos А
– это катет АС, следовательно, cos А 
Длину катета АС найдем по теореме Пифагора: 
Тогда ^2-5^2}=sqrt{144}=12.")
cos А 
tg A 
Ответ: 0,92; 0,42.
Заметим, что если катеты прямоугольного треугольника равны 5 и 12, то гипотенуза равна 13. Это одна из так называемых Пифагоровых троек. О них мы расскажем в других статьях сайта.
Задача 4. В треугольнике АВС угол С равен AC = 2, sin A= 
Найдите BC.
Решение:
AC = b = 2, BC = a, AB = c.
Так как sin A 


По теореме Пифагора  получим
получим
^2;")




Ответ: 0,5.
Задача 5. В треугольнике АВС угол С равен  tg A =
tg A =  Найдите AB.
Найдите AB.
Решение:
AC = b = 4, tg A 


^2+4^2}=sqrt{33+16} =7.")
Ответ: 7.
Задача 6.
В треугольнике АВС угол С равен  CH – высота, AB = 13, tg A =
CH – высота, AB = 13, tg A =  Найдите AH.
Найдите AH.

Решение:
AВ = с = 13, tg A =  тогда b = 5a.
тогда b = 5a.
По теореме Пифагора  ABC:
ABC:
^2=13^2,")

 тогда
тогда 
 (по двум углам), следовательно
(по двум углам), следовательно  откуда
откуда
^2:13=12,5.")
Ответ: 12,5.
Задача 7. В треугольнике АВС угол С равен 
CH – высота, BC = 3, sin A = 
Найдите AH.

Решение:
Так как sin A =  тогда
тогда  c = АВ = 18.
c = АВ = 18.
sin A =  = cos B =
= cos B =
Рассмотрим  BHC:
BHC:
 =
=  получим
получим 
тогда BH =  = 0,5,
= 0,5,
AH = AB — BH = 18 — 0,5 = 17,5.
Ответ: 17,5.
Задача 8. В треугольнике АВС угол С равен 90 CH — высота, BC = 3, cos A =
CH — высота, BC = 3, cos A = 
Найдите АH.
Решение:
Так как для АВС:  A =
A =  sin В =
sin В = 
а для ВНС: sin В =  =
=  , откуда СН =
, откуда СН = 
По теореме Пифагора найдем ВН:
}^2}=")

Высота прямоугольного треугольника, проведенная из вершины прямого угла, есть среднее пропорциональное между отрезками, на которые делится гипотенуза этой высотой. Поэтому для АВС получим:
 тогда
тогда }^2}{0,5}=displaystyle frac{35 cdot 2}{4}=17,5.")
Ответ: 17,5.
Задача 9. В треугольнике АВС угол С равен 90 CH — высота, СН = 24 и BН = 7. Найдите sin A.
Решение:
По определению sin A=  =
=  =
= 
Рассмотрим BHC : 
ВС найдем по теореме Пифагора:
ВС= 
тогда  а значит и sin A =
а значит и sin A =  = 0,28.
= 0,28.
Ответ: 0,28.
Задача 10. В треугольнике АВС угол С равен 90 CH — высота, СН = 8 и BН = 4. Найдите tg A.
Решение:
По определению sin A = = =  cos A =
cos A =  =
=  =
= 
тогда tg A =  который найдем из BHC:
который найдем из BHC:

Ответ: 0,5.
Задача 11. В треугольнике АВС угол С равен 90 CH — высота, BН = 12, tg A =  Найдите АН.
Найдите АН.
Решение:
По определению tg A= 
Для BHC:  , значит
, значит  СН =
СН = 
Для АHC: tg A=  то
то  AH =
AH = 
Ответ: 27.
Задача 12. В треугольнике АВС угол С равен 90 CH — высота, BН = 12, sin A = Найдите АВ.
Решение:
Так как cos В = = sin A =
Из СВН имеем cos В =  =
=  тогда ВС =
тогда ВС = 
В АВС имеем sinA = = тогда AВ = 
Ответ: 27.
Задача 13. В треугольнике АВС угол С равен 90 из вершины прямого угла к гипотенузе проведена высота СН. Найдите cos A, AC и AB, если СН = 12, ВС = 20.
Решение:
Найдем НВ по теореме Пифагора из ВСН:
(20+12)}=")

sin В =  =
= 
Для АВС: cos A =  получили cos A = 0,6.
получили cos A = 0,6.
Найдем АС и АВ несколькими способами.
1-й способ.
Так как cos A =  то пусть АС = 3х, АВ = 5х,
то пусть АС = 3х, АВ = 5х,
тогда по теореме Пифагора  получим
получим }^2+{(20)}^2= {(5x)}^2")


}^2,")
х = 5 ( так как х 0). Значит,
0). Значит, 
2-й способ.
 (по двум углам), значит
(по двум углам), значит  или
или 
k =  тогда
тогда  АС =
АС =  ;
;  АВ =
АВ = 
3-й способ.
 (высота прямоугольного треугольника, проведенная из вершины прямого угла, есть среднее пропорциональное между отрезками, на которые делится гипотенуза этой высотой) , тогда
(высота прямоугольного треугольника, проведенная из вершины прямого угла, есть среднее пропорциональное между отрезками, на которые делится гипотенуза этой высотой) , тогда  АН = 144:16 = 9.
АН = 144:16 = 9.
АВ = АН + НВ = 9 + 16 = 25.
По теореме Пифагора найдем АС:
(25+20)}") =
= 
Ответ: cos A = 0,6; АС = 15, АВ = 25.
Задача 14.
Высота ВН прямоугольного треугольника АВС, проведенная из вершины прямого угла В, равна 24 и отсекает от гипотенузы АС отрезок НС, равный 18.
Найдите АВ и cos А.
Решение:
Из прямоугольного ВНС по теореме Пифагора найдем гипотенузу ВС и cos C:
ВС =  =
= 
cos C = 
Для АВС: sin А =  = cos C =
= cos C = 
Для АНВ: sin А =  =
=  то
то  = АВ =
= АВ = 
Из основного тригонометрического тождества найдем
cos A = 
Ответ: АВ = 40, cos A = 0,8.
Задача 15.
Гипотенуза АС прямоугольного треугольника АСЕ равна 50, sin А = 
Найдите площадь треугольника.
Решение:

В прямоугольном АСЕ sin А = 
значит 
 = 14.
= 14.
Второй катет найдем, используя теорему Пифагора: 
(50+14)} =sqrt{36cdot 64}=6cdot8=48.")
Площадь прямоугольного треугольника равна S = 
поэтому 
Ответ: 336.
Задача 16.
В треугольнике АВС угол С — прямой, катеты АВ = 13 и ВС = 12, СК — высота.
Найдите sin  Результат округлите до сотых.
Результат округлите до сотых.
Решение:

 A-общий,
A-общий,  ),
),
значит  sin
sin 
Найдем АС по теореме Пифагора из САВ:

(13+12)}=sqrt{25}= 5.")
Тогда sin 
Ответ: 0,38.
Задача 17. В треугольнике АВС АС = ВС, АВ = 72, cos A =  Найдите высоту СН.
Найдите высоту СН.
Решение:

Так как АС = ВС, то АВС — равнобедренный с основанием АВ, тогда
высота СН является медианой, то есть АН = НВ = 
Поскольку АСН — прямоугольный,
cos A = 
 то есть
то есть 

 АС =
АС = 
По теореме Пифагора  тогда
тогда

(39+36)}=sqrt{3cdot 3cdot 25}=15.")
Ответ: 15.
Задача 18. В треугольнике АВС угол С равен 90 sin A =  AC = 10
AC = 10 Найдите АВ.
Найдите АВ.
Решение:
1-й способ.
Поскольку sin A =  то можно обозначить
то можно обозначить
ВС = 11х, АВ = 14х.
По теореме Пифагора 
}^2+{(11x)}^2={(14x)}^2;")
}^2-{(11x)}^2 = 3 cdot 100;")
(14х- 11х)(14х + 11х) = 3  100;
100;

 учитывая, что длина стороны положительна, х = 2,
учитывая, что длина стороны положительна, х = 2,
следовательно, АВ = 14 2 = 28.
2-й способ.
Воспользуемся основным тригонометрическим тождеством 
cos A = }^2}=sqrt{displaystyle frac{196-121}{196}}=sqrt{displaystyle frac{75}{196}}=displaystyle frac{5sqrt{3}}{14}.")
По определению cos A = значит
значит 
Так как АС=10 то
то  откуда АВ =
откуда АВ =  = 28.
= 28.
Ответ: 28.
Задача 19. Найдите углы ромба АВСD, если его диагонали АС и ВD равны 4 и 4.
Решение:

Пусть  ВАО =
ВАО = 
Диагонали ромба делят его углы пополам, значит,  =
=
Диагонали ромба взаимно перпендикулярны и точкой пересечения делятся пополам, следовательно, в прямоугольном треугольнике АВО катет АО =  а катет ВО =
а катет ВО = 
Поэтому tg откуда
откуда 

Ответ: 


Часто в задачах встречаются треугольники с углами  и
и  или с углами
или с углами  и
и  . Основные соотношения для них запоминайте наизусть!
. Основные соотношения для них запоминайте наизусть!

Для треугольника с углами и катет, лежащий напротив угла в  , равен половине гипотенузы.
, равен половине гипотенузы.
Треугольник с углами и — равнобедренный. В нем гипотенуза в  раз больше катета.
раз больше катета.
Задача 20.
В треугольнике АВС угол С равен 90 угол А равен 30 АВ = 2
Найдите высоту CH.
Решение:
Рассмотрим АВС:
По свойству катета, лежащего против угла  имеем ВС = АВ =
имеем ВС = АВ =
В BHC:  то
то  следовательно, ВН = BC =
следовательно, ВН = BC = 
По теореме Пифагора найдем НС:
}^2-{left(displaystyle frac{sqrt{3}}{2}right)}^2}=sqrt{3-displaystyle frac{3}{4}}=")

Ответ: 1,5.
Задача 21.
В треугольнике АВС угол С равен 90 CH — высота, АВ = 2,  Найдите АH.
Найдите АH.
Решение:
Из АВС найдем ВС = АВ = 1 (по свойству катета, лежащего против угла 30 ),
),
 то
то 
Из ВСН:  то
то  следовательно,
следовательно,
ВН = ВС =
АН = АВ — НВ = 2 —  = 1,5.
= 1,5.
Ответ: 1,5.
Еще раз повторим, что такое синус, косинус и тангенс угла в прямоугольном треугольнике.

Как запомнить эти соотношения? Лучший способ – решать много задач, и на уроках геометрии, и готовясь к ЕГЭ. Тогда все формулы, равенства, соотношения запомнятся сами собой.
Мы рассмотрели задачи на решение прямоугольных треугольников — то есть на нахождение неизвестных сторон или углов. Но это не всё! В вариантах ЕГЭ по математике множество задач, где фигурирует синус, косинус, тангенс или котангенс внешнего угла треугольника. Об этом — в следующей статье.
Если вам понравился разбор данной темы — записывайтесь на курсы подготовки к ЕГЭ по математике онлайн
Спасибо за то, что пользуйтесь нашими публикациями.
Информация на странице «Синус, косинус и тангенс острого угла прямоугольного треугольника» подготовлена нашими редакторами специально, чтобы помочь вам в освоении предмета и подготовке к экзаменам.
Чтобы успешно сдать нужные и поступить в высшее учебное заведение или колледж нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими материалами из данного раздела.
Публикация обновлена:
08.05.2023
- Определение
- График синуса
- Свойства синуса
- Обратная к синусу функция
- Таблица синусов
Определение
Синус острого угла α (sin α) – это отношение противолежащего катета (a) к гипотенузе (c) в прямоугольном треугольнике.
sin α = a / c

Например:
a = 3
c = 5
sin α = a / c = 3 / 5 = 0.6
График синуса
Функция синуса пишется как y = sin (x). График называется синусоидой и в общем виде выглядит следующим образом:

Синусоида – это периодическая функция с периодом T = 2π.
Свойства синуса
Ниже в табличном виде представлены основные свойства синуса с формулами:
Обратная к синусу функция
Арксинус x – это обратная функция к синусу x, при -1≤x≤1.
Если синус угла у равняется х (sin y = x), значит арксинус x равен у:
arcsin x = sin-1 x = y
Таблица синусов
| x (°) | x (рад) | sin x |
| -90° | -π/2 | -1 |
| -60° | -π/3 | -√3/2 |
| -45° | -π/4 | -√2/2 |
| -30° | -π/6 | -1/2 |
| 0° | 0 | 0 |
| 30° | π/6 | 1/2 |
| 45° | π/4 | √2/2 |
| 60° | π/3 | √3/2 |
| 90° | π/2 | 1 |
microexcel.ru
| Sine and cosine | |
|---|---|
 |
|
| General information | |
| General definition | ![{displaystyle {begin{aligned}&sin(alpha )={frac {textrm {opposite}}{textrm {hypotenuse}}}\[8pt]&cos(alpha )={frac {textrm {adjacent}}{textrm {hypotenuse}}}\[8pt]end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ea2762f231f5fdc1dcfacd59c303106f596ab2e1) |
| Fields of application | Trigonometry, Fourier series, etc. |
In mathematics, sine and cosine are trigonometric functions of an angle. The sine and cosine of an acute angle are defined in the context of a right triangle: for the specified angle, its sine is the ratio of the length of the side that is opposite that angle to the length of the longest side of the triangle (the hypotenuse), and the cosine is the ratio of the length of the adjacent leg to that of the hypotenuse. For an angle  , the sine and cosine functions are denoted simply as
, the sine and cosine functions are denoted simply as  and
and  .[1]
.[1]
More generally, the definitions of sine and cosine can be extended to any real value in terms of the lengths of certain line segments in a unit circle. More modern definitions express the sine and cosine as infinite series, or as the solutions of certain differential equations, allowing their extension to arbitrary positive and negative values and even to complex numbers.
The sine and cosine functions are commonly used to model periodic phenomena such as sound and light waves, the position and velocity of harmonic oscillators, sunlight intensity and day length, and average temperature variations throughout the year. They can be traced to the jyā and koṭi-jyā functions used in Indian astronomy during the Gupta period.
Notation[edit]
Sine and cosine are written using functional notation with the abbreviations sin and cos.
Often, if the argument is simple enough, the function value will be written without parentheses, as sin θ rather than as sin(θ).
Each of sine and cosine is a function of an angle, which is usually expressed in terms of radians or degrees. Except where explicitly stated otherwise, this article assumes that the angle is measured in radians.
Definitions[edit]
Right-angled triangle definitions[edit]

For the angle α, the sine function gives the ratio of the length of the opposite side to the length of the hypotenuse.
To define the sine and cosine of an acute angle α, start with a right triangle that contains an angle of measure α; in the accompanying figure, angle α in triangle ABC is the angle of interest. The three sides of the triangle are named as follows:
- The opposite side is the side opposite to the angle of interest, in this case side a.
- The hypotenuse is the side opposite the right angle, in this case side h. The hypotenuse is always the longest side of a right-angled triangle.
- The adjacent side is the remaining side, in this case side b. It forms a side of (and is adjacent to) both the angle of interest (angle A) and the right angle.
Once such a triangle is chosen, the sine of the angle is equal to the length of the opposite side, divided by the length of the hypotenuse:[2]

The other trigonometric functions of the angle can be defined similarly; for example, the tangent is the ratio between the opposite and adjacent sides.[2]
As stated, the values  and
and  appear to depend on the choice of right triangle containing an angle of measure α. However, this is not the case: all such triangles are similar, and so the ratios are the same for each of them.
appear to depend on the choice of right triangle containing an angle of measure α. However, this is not the case: all such triangles are similar, and so the ratios are the same for each of them.
Unit circle definitions[edit]
In trigonometry, a unit circle is the circle of radius one centered at the origin (0, 0) in the Cartesian coordinate system.
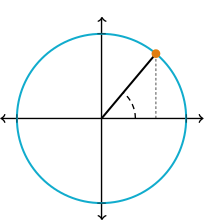
Unit circle: a circle with radius one
Let a line through the origin intersect the unit circle, making an angle of θ with the positive half of the x-axis. The x— and y-coordinates of this point of intersection are equal to cos(θ) and sin(θ), respectively. This definition is consistent with the right-angled triangle definition of sine and cosine when  : because the length of the hypotenuse of the unit circle is always 1,
: because the length of the hypotenuse of the unit circle is always 1,  . The length of the opposite side of the triangle is simply the y-coordinate. A similar argument can be made for the cosine function to show that
. The length of the opposite side of the triangle is simply the y-coordinate. A similar argument can be made for the cosine function to show that  when , even under the new definition using the unit circle. tan(θ) is then defined as
when , even under the new definition using the unit circle. tan(θ) is then defined as  , or, equivalently, as the slope of the line segment.
, or, equivalently, as the slope of the line segment.
Using the unit circle definition has the advantage that the angle can be extended to any real argument. This can also be achieved by requiring certain symmetries, and that sine be a periodic function.
Complex exponential function definitions[edit]
The exponential function  is defined on the entire domain of the complex numbers. The definition of sine and cosine can be extended to all complex numbers via
is defined on the entire domain of the complex numbers. The definition of sine and cosine can be extended to all complex numbers via


These can be reversed to give Euler’s formula


When plotted on the complex plane, the function  for real values of
for real values of  traces out the unit circle in the complex plane.
traces out the unit circle in the complex plane.
When is a real number, sine and cosine simplify to the imaginary and real parts of or  , as:
, as:


When  for real values and
for real values and  , sine and cosine can be expressed in terms of real sines, cosines, and hyperbolic functions as
, sine and cosine can be expressed in terms of real sines, cosines, and hyperbolic functions as
![{displaystyle {begin{aligned}sin z&=sin xcosh y+icos xsinh y\[5pt]cos z&=cos xcosh y-isin xsinh yend{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c1646655eab602e234f42df85cae241ffbb867cf)
Differential equation definition[edit]
 is the solution
is the solution  to the two-dimensional system of differential equations
to the two-dimensional system of differential equations  and
and  with the initial conditions
with the initial conditions  and
and  . One could interpret the unit circle in the above definitions as defining the phase space trajectory of the differential equation with the given initial conditions.
. One could interpret the unit circle in the above definitions as defining the phase space trajectory of the differential equation with the given initial conditions.

The animation above is showing how the sine function (in red) is graphed from the y-coordinate (red dot) of a point on the unit circle (in green), at an angle of θ. The cosine (in blue) is the x-coordinate.
It can be interpreted as a phase space trajectory of the system of differential equations and starting from the initial conditions and .
Series definitions[edit]

The sine function (blue) is closely approximated by its Taylor polynomial of degree 7 (pink) for a full cycle centered on the origin.

This animation shows how including more and more terms in the partial sum of its Taylor series approaches a sine curve.
The successive derivatives of sine, evaluated at zero, can be used to determine its Taylor series. Using only geometry and properties of limits, it can be shown that the derivative of sine is cosine, and that the derivative of cosine is the negative of sine. This means the successive derivatives of sin(x) are cos(x), -sin(x), -cos(x), sin(x), continuing to repeat those four functions. The (4n+k)-th derivative, evaluated at the point 0:

where the superscript represents repeated differentiation. This implies the following Taylor series expansion at x = 0. One can then use the theory of Taylor series to show that the following identities hold for all real numbers x (where x is the angle in radians):[3]
![{displaystyle {begin{aligned}sin(x)&=x-{frac {x^{3}}{3!}}+{frac {x^{5}}{5!}}-{frac {x^{7}}{7!}}+cdots \[8pt]&=sum _{n=0}^{infty }{frac {(-1)^{n}}{(2n+1)!}}x^{2n+1}\[8pt]end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/def345e147219a7892eb8140dfeb1c77b29dce38)
Taking the derivative of each term gives the Taylor series for cosine:
![{displaystyle {begin{aligned}cos(x)&=1-{frac {x^{2}}{2!}}+{frac {x^{4}}{4!}}-{frac {x^{6}}{6!}}+cdots \[8pt]&=sum _{n=0}^{infty }{frac {(-1)^{n}}{(2n)!}}x^{2n}\[8pt]end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/72f8792e2fd4203f00339519200068cdd1652b08)
Continued fraction definitions[edit]
The sine function can also be represented as a generalized continued fraction:


The continued fraction representations can be derived from Euler’s continued fraction formula and express the real number values, both rational and irrational, of the sine and cosine functions.
Identities[edit]
Exact identities (using radians):
These apply for all values of .


Reciprocals[edit]
The reciprocal of sine is cosecant, i.e., the reciprocal of  is
is  . Cosecant gives the ratio of the length of the hypotenuse to the length of the opposite side. Similarly, the reciprocal of cosine is secant, which gives the ratio of the length of the hypotenuse to that of the adjacent side.
. Cosecant gives the ratio of the length of the hypotenuse to the length of the opposite side. Similarly, the reciprocal of cosine is secant, which gives the ratio of the length of the hypotenuse to that of the adjacent side.


Inverses[edit]

The usual principal values of the arcsin(x) and arccos(x) functions graphed on the Cartesian plane
The inverse function of sine is arcsine (arcsin or asin) or inverse sine (sin−1). The inverse function of cosine is arccosine (arccos, acos, or cos−1). (The superscript of −1 in sin−1 and cos−1 denotes the inverse of a function, not exponentiation.) As sine and cosine are not injective, their inverses are not exact inverse functions, but partial inverse functions. For example, sin(0) = 0, but also sin(π) = 0, sin(2π) = 0 etc. It follows that the arcsine function is multivalued: arcsin(0) = 0, but also arcsin(0) = π, arcsin(0) = 2π, etc. When only one value is desired, the function may be restricted to its principal branch. With this restriction, for each x in the domain, the expression arcsin(x) will evaluate only to a single value, called its principal value. The standard range of principal values for arcsin is from −π/2 to π/2 and the standard range for arccos is from 0 to π.

where (for some integer k):

By definition, arcsin and arccos satisfy the equations:

and

Pythagorean trigonometric identity[edit]
The basic relationship between the sine and the cosine is the Pythagorean trigonometric identity:[1]

where sin2(x) means (sin(x))2.
Double angle formulas[edit]
Sine and cosine satisfy the following double angle formulas:



Sine function in blue and sine squared function in red. The X axis is in radians.
The cosine double angle formula implies that sin2 and cos2 are, themselves, shifted and scaled sine waves. Specifically,[4]

The graph shows both the sine function and the sine squared function, with the sine in blue and sine squared in red. Both graphs have the same shape, but with different ranges of values, and different periods. Sine squared has only positive values, but twice the number of periods.
Derivative and integrals[edit]
The derivatives of sine and cosine are:

and their antiderivatives are:


where C denotes the constant of integration.[1]
Properties relating to the quadrants[edit]

The four quadrants of a Cartesian coordinate system
The table below displays many of the key properties of the sine function (sign, monotonicity, convexity), arranged by the quadrant of the argument. For arguments outside those in the table, one may compute the corresponding information by using the periodicity  of the sine function.
of the sine function.
| Quadrant | Angle | Sine | Cosine | |||||
|---|---|---|---|---|---|---|---|---|
| Degrees | Radians | Sign | Monotony | Convexity | Sign | Monotony | Convexity | |
| 1st quadrant, I | 
|

|

|
increasing | concave |
|
decreasing | concave |
| 2nd quadrant, II | 
|

|
|
decreasing | concave | 
|
decreasing | convex |
| 3rd quadrant, III | 
|

|
|
decreasing | convex |
|
increasing | convex |
| 4th quadrant, IV | 
|

|
|
increasing | convex |
|
increasing | concave |

The following table gives basic information at the boundary of the quadrants.
| Degrees | Radians | 
|

|
||
|---|---|---|---|---|---|
| Value | Point type | Value | Point type | ||

|

|
|
Root, inflection | 
|
Maximum |

|

|
|
Maximum |
|
Root, inflection |

|

|
|
Root, inflection | 
|
Minimum |

|

|
|
Minimum |
|
Root, inflection |
Fixed points[edit]

The fixed point iteration xn+1 = cos(xn) with initial value x0 = −1 converges to the Dottie number.
Zero is the only real fixed point of the sine function; in other words the only intersection of the sine function and the identity function is  . The only real fixed point of the cosine function is called the Dottie number. That is, the Dottie number is the unique real root of the equation
. The only real fixed point of the cosine function is called the Dottie number. That is, the Dottie number is the unique real root of the equation  The decimal expansion of the Dottie number is
The decimal expansion of the Dottie number is  .[5]
.[5]
Arc length[edit]
The arc length of the sine curve between and  is
is

where  is the incomplete elliptic integral of the second kind with modulus
is the incomplete elliptic integral of the second kind with modulus  . It cannot be expressed using elementary functions.
. It cannot be expressed using elementary functions.
The arc length for a full period is[6]

where  is the gamma function and
is the gamma function and  is the lemniscate constant.[6][7]
is the lemniscate constant.[6][7]
Law of sines[edit]
The law of sines states that for an arbitrary triangle with sides a, b, and c and angles opposite those sides A, B and C:

This is equivalent to the equality of the first three expressions below:

where R is the triangle’s circumradius.
It can be proved by dividing the triangle into two right ones and using the above definition of sine. The law of sines is useful for computing the lengths of the unknown sides in a triangle if two angles and one side are known. This is a common situation occurring in triangulation, a technique to determine unknown distances by measuring two angles and an accessible enclosed distance.
Law of cosines[edit]
The law of cosines states that for an arbitrary triangle with sides a, b, and c and angles opposite those sides A, B and C:

In the case where  ,
,  and this becomes the Pythagorean theorem: for a right triangle,
and this becomes the Pythagorean theorem: for a right triangle,  where c is the hypotenuse.
where c is the hypotenuse.
Special values[edit]
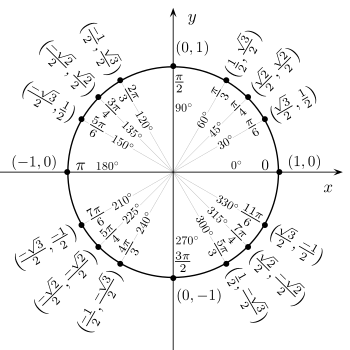
Some common angles (θ) shown on the unit circle. The angles are given in degrees and radians, together with the corresponding intersection point on the unit circle, (cos(θ), sin(θ)).
For certain integral numbers x of degrees, the values of sin(x) and cos(x) are particularly simple and can be expressed without nested square roots. A table of these angles is given below. For more complex angle expressions see Exact trigonometric values § Common angles.
| Angle, x | sin(x) | cos(x) | |||||
|---|---|---|---|---|---|---|---|
| Degrees | Radians | Gradians | Turns | Exact | Decimal | Exact | Decimal |
| 0° | 0 | 0g | 0 | 0 | 0 | 1 | 1 |
| 15° | 1/12π | 16+2/3g | 1/24 | 
|
0.2588 | 
|
0.9659 |
| 30° | 1/6π | 33+1/3g | 1/12 | 1/2 | 0.5 | 
|
0.8660 |
| 45° | 1/4π | 50g | 1/8 | 
|
0.7071 |
|
0.7071 |
| 60° | 1/3π | 66+2/3g | 1/6 |
|
0.8660 | 1/2 | 0.5 |
| 75° | 5/12π | 83+1/3g | 5/24 |
|
0.9659 |
|
0.2588 |
| 90° | 1/2π | 100g | 1/4 | 1 | 1 | 0 | 0 |
90 degree increments:
| x in degrees | 0° | 90° | 180° | 270° | 360° |
|---|---|---|---|---|---|
| x in radians | 0 | π/2 | π | 3π/2 | 2π |
| x in gons | 0 | 100g | 200g | 300g | 400g |
| x in turns | 0 | 1/4 | 1/2 | 3/4 | 1 |
| sin x | 0 | 1 | 0 | −1 | 0 |
| cos x | 1 | 0 | −1 | 0 | 1 |
Relationship to complex numbers[edit]

 and
and  are the real and imaginary parts of
are the real and imaginary parts of  .
.
Sine and cosine are used to connect the real and imaginary parts of a complex number with its polar coordinates (r, φ):

The real and imaginary parts are:


where r and φ represent the magnitude and angle of the complex number z.
For any real number θ, Euler’s formula says that:

Therefore, if the polar coordinates of z are (r, φ), 
Complex arguments[edit]

Domain coloring of sin(z) in the complex plane. Brightness indicates absolute magnitude, hue represents complex argument.

Applying the series definition of the sine and cosine to a complex argument, z, gives:

where sinh and cosh are the hyperbolic sine and cosine. These are entire functions.
It is also sometimes useful to express the complex sine and cosine functions in terms of the real and imaginary parts of its argument:

Partial fraction and product expansions of complex sine[edit]
Using the partial fraction expansion technique in complex analysis, one can find that the infinite series

both converge and are equal to  . Similarly, one can show that
. Similarly, one can show that

Using product expansion technique, one can derive

Alternatively, the infinite product for the sine can be proved using complex Fourier series.
Usage of complex sine[edit]
sin(z) is found in the functional equation for the Gamma function,

which in turn is found in the functional equation for the Riemann zeta-function,

As a holomorphic function, sin z is a 2D solution of Laplace’s equation:

The complex sine function is also related to the level curves of pendulums.[how?][9][better source needed]
Complex graphs[edit]
|
|
|
|
| real component | imaginary component | magnitude |

|
|
|
|
| real component | imaginary component | magnitude |


History[edit]

While the early study of trigonometry can be traced to antiquity, the trigonometric functions as they are in use today were developed in the medieval period. The chord function was discovered by Hipparchus of Nicaea (180–125 BCE) and Ptolemy of Roman Egypt (90–165 CE). See in particular Ptolemy’s table of chords.
The sine and cosine functions can be traced to the jyā and koṭi-jyā functions used in Indian astronomy during the Gupta period (Aryabhatiya and Surya Siddhanta), via translation from Sanskrit to Arabic and then from Arabic to Latin.[10]
All six trigonometric functions in current use were known in Islamic mathematics by the 9th century, as was the law of sines, used in solving triangles.[11] With the exception of the sine (which was adopted from Indian mathematics), the other five modern trigonometric functions were discovered by Arabic mathematicians, including the cosine, tangent, cotangent, secant and cosecant.[11] Al-Khwārizmī (c. 780–850) produced tables of sines, cosines and tangents.[12][13] Muhammad ibn Jābir al-Harrānī al-Battānī (853–929) discovered the reciprocal functions of secant and cosecant, and produced the first table of cosecants for each degree from 1° to 90°.[13]
The first published use of the abbreviations sin, cos, and tan is by the 16th-century French mathematician Albert Girard; these were further promulgated by Euler (see below). The Opus palatinum de triangulis of Georg Joachim Rheticus, a student of Copernicus, was probably the first in Europe to define trigonometric functions directly in terms of right triangles instead of circles, with tables for all six trigonometric functions; this work was finished by Rheticus’ student Valentin Otho in 1596.
In a paper published in 1682, Leibniz proved that sin x is not an algebraic function of x.[14] Roger Cotes computed the derivative of sine in his Harmonia Mensurarum (1722).[15] Leonhard Euler’s Introductio in analysin infinitorum (1748) was mostly responsible for establishing the analytic treatment of trigonometric functions in Europe, also defining them as infinite series and presenting «Euler’s formula», as well as the near-modern abbreviations sin., cos., tang., cot., sec., and cosec.[10]
Etymology[edit]
Etymologically, the word sine derives from the Sanskrit word jyā ‘bow-string’[16][17]
or more specifically its synonym jīvá (both adopted from Ancient Greek χορδή ‘string’[18]), due to visual similarity between the arc of a circle with its corresponding chord and a bow with its string (see jyā, koti-jyā and utkrama-jyā). This was transliterated in Arabic as jība, which is however meaningless in that language and abbreviated jb (جب). Since Arabic is written without short vowels, jb was interpreted as the homograph jaib, jayb (جيب), which means ‘bosom’, ‘pocket’, ‘fold’. When the Arabic texts of Al-Battani and al-Khwārizmī were translated into Medieval Latin in the 12th century by Gerard of Cremona, he used the Latin equivalent sinus (which also means ‘bay’ or ‘fold’, and more specifically ‘the hanging fold of a toga over the breast’).[10][19][20] Gerard was probably not the first scholar to use this translation; Robert of Chester appears to have preceded him and there is evidence of even earlier usage.[21][22] The English form sine was introduced in the 1590s.[23]
The word cosine derives from an abbreviation of the Latin complementi sinus ‘sine of the complementary angle’ as cosinus in Edmund Gunter’s Canon triangulorum (1620), which also includes a similar definition of cotangens.[24][25][26]
Software implementations[edit]
There is no standard algorithm for calculating sine and cosine. IEEE 754, the most widely used standard for the specification of reliable floating-point computation, does not address calculating trigonometric functions such as sine. The reason is that no efficient algorithm is known for computing sine and cosine with a specified accuracy, especially for large inputs.[27]
Algorithms for calculating sine may be balanced for such constraints as speed, accuracy, portability, or range of input values accepted. This can lead to different results for different algorithms, especially for special circumstances such as very large inputs, e.g. sin(1022).
A common programming optimization, used especially in 3D graphics, is to pre-calculate a table of sine values, for example one value per degree, then for values in-between pick the closest pre-calculated value, or linearly interpolate between the 2 closest values to approximate it. This allows results to be looked up from a table rather than being calculated in real time. With modern CPU architectures this method may offer no advantage.[citation needed]
The CORDIC algorithm is commonly used in scientific calculators.
The sine and cosine functions, along with other trigonometric functions, is widely available across programming languages and platforms. In computing, they are typically abbreviated to sin and cos.
Some CPU architectures have a built-in instruction for sine, including the Intel x87 FPUs since the 80387.
In programming languages, sin and cos are typically either a built-in function or found within the language’s standard math library.
For example, the C standard library defines sine functions within math.h: sin(double), sinf(float), and sinl(long double). The parameter of each is a floating point value, specifying the angle in radians. Each function returns the same data type as it accepts. Many other trigonometric functions are also defined in math.h, such as for cosine, arc sine, and hyperbolic sine (sinh).
Similarly, Python defines math.sin(x) and math.cos(x) within the built-in math module. Complex sine and cosine functions are also available within the cmath module, e.g. cmath.sin(z). CPython’s math functions call the C math library, and use a double-precision floating-point format.
Turns based implementations[edit]
Some software libraries provide implementations of sine and cosine using the input angle in half-turns, a half-turn being an angle of 180 degrees or radians. Representing angles in turns or half-turns has accuracy advantages and efficiency advantages in some cases.[28][29] In MATLAB, OpenCL, R, Julia, CUDA, and ARM, these function are called sinpi and cospi.[28][30][29][31][32][33] For example, sinpi(x) would evaluate to  where x is expressed in half-turns, and consequently the final input to the function, πx can be interpreted in radians by sin.
where x is expressed in half-turns, and consequently the final input to the function, πx can be interpreted in radians by sin.
The accuracy advantage stems from the ability to perfectly represent key angles like full-turn, half-turn, and quarter-turn losslessly in binary floating-point or fixed-point. In contrast, representing  , , and
, , and  in binary floating-point or binary scaled fixed-point always involves a loss of accuracy since irrational numbers cannot be represented with finitely many binary digits.
in binary floating-point or binary scaled fixed-point always involves a loss of accuracy since irrational numbers cannot be represented with finitely many binary digits.
Turns also have an accuracy advantage and efficiency advantage for computing modulo to one period. Computing modulo 1 turn or modulo 2 half-turns can be losslessly and efficiently computed in both floating-point and fixed-point. For example, computing modulo 1 or modulo 2 for a binary point scaled fixed-point value requires only a bit shift or bitwise AND operation. In contrast, computing modulo involves inaccuracies in representing .
For applications involving angle sensors, the sensor typically provides angle measurements in a form directly compatible with turns or half-turns. For example, an angle sensor may count from 0 to 4096 over one complete revolution.[34] If half-turns are used as the unit for angle, then the value provided by the sensor directly and losslessly maps to a fixed-point data type with 11 bits to the right of the binary point. In contrast, if radians are used as the unit for storing the angle, then the inaccuracies and cost of multiplying the raw sensor integer by an approximation to  would be incurred.
would be incurred.
See also[edit]
- Āryabhaṭa’s sine table
- Bhaskara I’s sine approximation formula
- Discrete sine transform
- Euler’s formula
- Generalized trigonometry
- Hyperbolic function
- Dixon elliptic functions
- Lemniscate elliptic functions
- Law of sines
- List of periodic functions
- List of trigonometric identities
- Madhava series
- Madhava’s sine table
- Optical sine theorem
- Polar sine—a generalization to vertex angles
- Proofs of trigonometric identities
- Sinc function
- Sine and cosine transforms
- Sine integral
- Sine quadrant
- Sine wave
- Sine–Gordon equation
- Sinusoidal model
- SOH-CAH-TOA
- Trigonometric functions
- Trigonometric integral
Citations[edit]
- ^ a b c Weisstein, Eric W. «Sine». mathworld.wolfram.com. Retrieved 2020-08-29.
- ^ a b «Sine, Cosine, Tangent». www.mathsisfun.com. Retrieved 2020-08-29.
- ^ See Ahlfors, pages 43–44.
- ^ «Sine-squared function». Retrieved August 9, 2019.
- ^ «OEIS A003957». oeis.org. Retrieved 2019-05-26.
- ^ a b «A105419 — Oeis».
- ^ Adlaj, Semjon (2012). «An Eloquent Formula for the Perimeter of an Ellipse» (PDF). American Mathematical Society. p. 1097.
- ^ Rudin, Walter (1987). Real and Complex Analysis (Third ed.). McGraw-Hill Book Company. ISBN 0-07-100276-6. p. 299, Theorem 15.4
- ^ «Why are the phase portrait of the simple plane pendulum and a domain coloring of sin(z) so similar?». math.stackexchange.com. Retrieved 2019-08-12.
- ^ a b c Merzbach, Uta C.; Boyer, Carl B. (2011), A History of Mathematics (3rd ed.), John Wiley & Sons: It was Robert of Chester’s translation from the Arabic that resulted in our word «sine». The Hindus had given the name jiva to the half-chord in trigonometry, and the Arabs had taken this over as jiba. In the Arabic language there is also the word jaib meaning «bay» or «inlet». When Robert of Chester came to translate the technical word jiba, he seems to have confused this with the word jaib (perhaps because vowels were omitted); hence, he used the word sinus, the Latin word for «bay» or «inlet».
- ^ a b Gingerich, Owen (1986). «Islamic Astronomy». Scientific American. Vol. 254. p. 74. Archived from the original on 2013-10-19. Retrieved 2010-07-13.
- ^ Jacques Sesiano, «Islamic mathematics», p. 157, in Selin, Helaine; D’Ambrosio, Ubiratan, eds. (2000). Mathematics Across Cultures: The History of Non-western Mathematics. Springer Science+Business Media. ISBN 978-1-4020-0260-1.
- ^ a b «trigonometry». Encyclopedia Britannica.
- ^ Nicolás Bourbaki (1994). Elements of the History of Mathematics. Springer. ISBN 9783540647676.
- ^ «Why the sine has a simple derivative Archived 2011-07-20 at the Wayback Machine», in Historical Notes for Calculus Teachers Archived 2011-07-20 at the Wayback Machine by V. Frederick Rickey Archived 2011-07-20 at the Wayback Machine
- ^ «How the Trig Functions Got their Names». Ask Dr. Math. Drexel University. Retrieved 2 March 2010.
- ^ J J O’Connor and E F Robertson (June 1996). «The trigonometric functions». Retrieved 2 March 2010.
- ^ See Plofker, Mathematics in India, Princeton University Press, 2009, p. 257
See «Clark University». Archived from the original on 15 June 2008.
See Maor (1998), chapter 3, regarding the etymology. - ^ Eli Maor (1998), Trigonometric Delights, Princeton: Princeton University Press, p. 35-36.
- ^ Victor J. Katz (2008), A History of Mathematics, Boston: Addison-Wesley, 3rd. ed., p. 253, sidebar 8.1. «A History of Mathematics» (PDF). Archived (PDF) from the original on 2015-04-14. Retrieved 2015-04-09.: The English word “sine” comes from a series of mistranslations of the Sanskrit jyā-ardha (chord-half). Āryabhaṭa frequently abbreviated this term to jyā or its synonym jīvá. When some of the Hindu works were later translated into Arabic, the word was simply transcribed phonetically into an otherwise meaningless Arabic word jiba. But since Arabic is written without vowels, later writers interpreted the consonants jb as jaib, which means bosom or breast. In the twelfth century, when an Arabic trigonometry work was translated into Latin, the translator used the equivalent Latin word sinus, which also meant bosom, and by extension, fold (as in a toga over a breast), or a bay or gulf.
- ^ Smith, D.E. (1958) [1925], History of Mathematics, vol. I, Dover, p. 202, ISBN 0-486-20429-4
- ^ Various sources credit the first use of sinus to either
- Plato Tiburtinus’s 1116 translation of the Astronomy of Al-Battani
- Gerard of Cremona’s translation of the Algebra of al-Khwārizmī
- Robert of Chester’s 1145 translation of the tables of al-Khwārizmī
See Merlet, A Note on the History of the Trigonometric Functions in Ceccarelli (ed.), International Symposium on History of Machines and Mechanisms, Springer, 2004
See Maor (1998), chapter 3, for an earlier etymology crediting Gerard.
See Katx, Victor (July 2008). A history of mathematics (3rd ed.). Boston: Pearson. p. 210 (sidebar). ISBN 978-0321387004. - ^ The anglicized form is first recorded in 1593 in Thomas Fale’s Horologiographia, the Art of Dialling.
- ^ Gunter, Edmund (1620). Canon triangulorum.
- ^ Roegel, Denis, ed. (6 December 2010). «A reconstruction of Gunter’s Canon triangulorum (1620)» (Research report). HAL. inria-00543938. Archived from the original on 28 July 2017. Retrieved 28 July 2017.
- ^ «cosine».
- ^ Zimmermann, Paul (2006), «Can we trust floating-point numbers?», Grand Challenges of Informatics (PDF), p. 14/31, archived (PDF) from the original on 2011-07-16, retrieved 2010-09-11
- ^ a b «MATLAB Documentation sinpi
- ^ a b «R Documentation sinpi
- ^ «OpenCL Documentation sinpi
- ^ «Julia Documentation sinpi
- ^ «CUDA Documentation sinpi
- ^ «ARM Documentation sinpi
- ^ «ALLEGRO Angle Sensor Datasheet
References[edit]
- Traupman, Ph.D., John C. (1966), The New College Latin & English Dictionary, Toronto: Bantam, ISBN 0-553-27619-0
- Webster’s Seventh New Collegiate Dictionary, Springfield: G. & C. Merriam Company, 1969
External links[edit]
![]()
Look up sine in Wiktionary, the free dictionary.
 Media related to Sine function at Wikimedia Commons
Media related to Sine function at Wikimedia Commons
- Развертка ординаты движения точки по числовой окружности в функцию от угла
- Свойства функции y=sinx
- Примеры
п.1. Развертка ординаты движения точки по числовой окружности в функцию от угла
При движении точки по числовой окружности её ордината является синусом соответствующего угла (см. §2 данного справочника).
Рассмотрим, как изменяется синус, если точка описывает полный круг, и угол x изменяется в пределах: 0≤x≤2π и построим график y=sinx на этом отрезке.

Если мы продолжим движение по окружности для углов x > 2π, кривая продолжится вправо; если будем обходить числовую окружность в отрицательном направлении (по часовой стрелке) для углов x<0, кривая продолжится влево.
В результате получаем график y=sinx для любого (xinmathbb{R}).
График y=sinx называют синусоидой.
Часть синусоиды для 0≤x≤2π называют волной синусоиды.
Часть синусоиды для 0≤x≤π называют полуволной или аркой синусоиды.
п.2. Свойства функции y=sinx
1. Область определения (xinmathbb{R}) — множество действительных чисел.
2. Функция ограничена сверху и снизу
$$ -1leq sinxleq 1 $$
Область значений (yin[-1;1])
3. Функция нечётная
$$ sin(-x)=-sinx $$
4. Функция периодическая с периодом 2π
$$ sin(x+2pi k)=sinx $$
5. Максимальные значения (y_{max}=1) достигаются в точках
$$ x=fracpi2+2pi k $$
Минимальные значения (y_{min}=-1) достигаются в точках
$$ x=-fracpi2+2pi k $$
Нули функции (y_{0}=sinx_0=0) достигаются в точках (x_0=pi k)
6. Функция возрастает на отрезках
$$ -fracpi2+2pi kleq xleqfracpi2+2pi k $$
Функция убывает на отрезках
$$ fracpi2+2pi kleq xleqfrac{3pi}{2}+2pi k $$
7. Функция непрерывна.
п.3. Примеры
Пример 1.Найдите наименьшее и наибольшее значение функции y=sinx на отрезке:
a) (left[fracpi6; frac{3pi}{4}right]) $$ y_{min}=sinleft(fracpi6right)=frac12, y_{max}=sinleft(fracpi2right)=1 $$ б) (left[frac{5pi}{6}; frac{5pi}{3}right]) $$ y_{min}=sinleft(frac{3pi}{2}right)=-1, y_{max}=sinleft(frac{5pi}{6}right)=frac12 $$
Пример 2. Решите уравнение графически:
a) (sinx=3x)
Один корень: x = 0
б) (sinx=2x-2pi)
Один корень: x = π
в) (sinx-sqrt{x-pi}=0)
(sinx=sqrt{x-pi}) 
Один корень: x = π
г*) (sinx=left(x-fracpi2right)^2-frac{pi^2}{4})
(y=left(x-fracpi2right)^2-frac{pi^2}{4}) – парабола ветками вверх, с осью симметрии (x_0=fracpi2) и вершиной (left(fracpi2; -frac{pi^2}{4}right)) (см. §29 справочника для 8 класса)
Два корня: (x_1=0, x_2=pi)
Пример 3. Постройте в одной системе координат графики функций $$ y=sinx, y=-sinx, y=2sinx, y=sinx+2 $$ 
(y=-sinx) – отражение исходной функции (y=sinx) относительно оси OX. Область значений (yin[-1;1]).
(y=2sinx) – исходная функция растягивается в 2 раза по оси OY. Область значений (yin[-2;2]).
(y=sinx+2) — исходная функция поднимается вверх на 2. Область значений (yin[1;3]).
Пример 4. Постройте в одной системе координат графики функций $$ y=sinx, y=sin2x, y=sinfrac{x}{2} $$ 
Амплитуда колебаний у всех трёх функций одинакова, область значений (yin[-1;1]).
Множитель под синусом изменяет период колебаний.
(y=sin2x) — период уменьшается в 2 раза, полная волна укладывается в отрезок (0leq xleq pi).
(y=sinfrac{x}{2}) — период увеличивается в 2 раза, полная волна укладывается в отрезок (0leq xleq 4pi).
Уравнения разложения тригонометрических функций:квадрат синус альфа, косинус альфа, тангенс альфа, котангенс альфа.




Формулы преобразования функций двойного угла (2α) в выражение через одинарный угол (α)
sin(2α)- через sin и cos:

sin(2α)- через tg и ctg:

cos(2α)- через sin и cos:

cos(2α)- через tg и ctg:

tg(2α) и сtg(2α):


Формулы преобразования функций (синус, косинус, тангенс, котангенс), тройного угла (3α) в выражение через одинарный угол (α):




Тригонометрические формулы преобразования разности аргументов





sin(α)=OA
cos(α)=OC
tg(α)=DE
ctg(α)=MK
R=OB=1
Значения функций для некоторых углов, α

В таблице показаны формулы приведения для тригонометрических функций (sin, cos, tg, ctg).
