Расстояние Хэмминга. На универсальном множестве ![]() зададим с помощью характеристической функции
зададим с помощью характеристической функции ![]()
![]() подмножества
подмножества ![]() и
и ![]() :
:
![]() ,
, ![]() .
.
Под Расстоянием Хэмминга между множествами ![]() и
и ![]() понимают величину:
понимают величину:
 .
.
Не всякую величину можно назвать расстоянием. Для того чтобы величина ![]() была расстоянием между подмножествами
была расстоянием между подмножествами ![]() и
и ![]() универсального множества
универсального множества ![]() необходимо выполнение следующих условий:
необходимо выполнение следующих условий:
1) ![]() ;
;
2) ![]() ;
;
3) ![]() ;
;
4) ![]() для любых подмножеств
для любых подмножеств ![]() , где оператор «
, где оператор «![]() » связан с вводимым понятием расстояния.
» связан с вводимым понятием расстояния.
Если ![]() , то расстояние Хэмминга удовлетворяет условиям 1 – 4.
, то расстояние Хэмминга удовлетворяет условиям 1 – 4.
Для конечного множества ![]() мощности
мощности ![]() можно определить Относительное расстояние Хэмминга:
можно определить Относительное расстояние Хэмминга: ![]() . Очевидно,
. Очевидно, ![]()
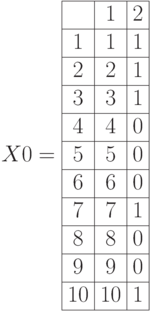
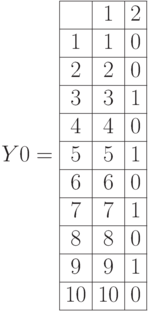
Пример 35. На универсальном множестве ![]() зададим подмножества
зададим подмножества ![]() и
и ![]() :
:
![]() ,
, ![]() .
.
Применяя формулу расстояния Хэмминга между множествами, получим: ![]() , а для относительного расстояния Хэмминга имеем:
, а для относительного расстояния Хэмминга имеем: ![]()
Обобщение понятия расстояния Хэмминга. Пусть нечёткие множества ![]() и
и ![]() заданы на универсальном множестве
заданы на универсальном множестве ![]() мощности
мощности ![]() . Тогда Обобщённое расстояние Хэмминга
. Тогда Обобщённое расстояние Хэмминга ![]() между нечёткими множествами
между нечёткими множествами ![]() и
и ![]() определяется по формуле:
определяется по формуле:
 .
.
Обобщённое относительное расстояние Хэмминга определяет величина
 .
.
Очевидно, ![]()
Обобщённое евклидово расстояние. Расстояние Хэмминга называется также линейным расстоянием. Обобщённое евклидово или квадратичное расстояние между нечёткими множествами определяется по формуле:
 .
.
Очевидно, ![]() . Величина
. Величина ![]() называется Обобщённой евклидовой нормой, а величина
называется Обобщённой евклидовой нормой, а величина  – Обобщённым относительным евклидовым расстоянием.
– Обобщённым относительным евклидовым расстоянием.
Выбор того или иного расстояния зависит от природы рассматриваемой проблемы. Каждое из этих расстояний обладает своими преимуществами и недостатками, которые становятся очевидными в приложениях.
Случай бесконечного универсального множества. Расстояния ![]() ,
, ![]() и норма
и норма ![]() могут быть определены и в случае, когда
могут быть определены и в случае, когда ![]() – бесконечное множество.
– бесконечное множество.
Если ![]() – счётное множество, то
– счётное множество, то  , аналогично,
, аналогично,  При условии, что ряды в этих формулах сходятся.
При условии, что ряды в этих формулах сходятся.
Если ![]() , то
, то
 ,
, 
При условии, что несобственные интегралы в этих формулах сходятся.
Легко показать, что только для чёткого множества ![]() , ближайшего к нечёткому множеству
, ближайшего к нечёткому множеству ![]() , евклидово расстояние от
, евклидово расстояние от ![]() до заданного нечёткого
до заданного нечёткого ![]() минимально.
минимально.
| < Предыдущая | Следующая > |
|---|
6.5 Операции над нечеткими множествами
Рассмотрим операции над нечеткими множествами.
Дополнение. Пересечение. Объединение.
Пусть дано множество  и два его нечетких подмножества:
и два его нечетких подмножества: 
Дополнением нечеткого множества  называют множество
называют множество
 |
( 6.4) |
Пересечением нечетких множеств и  называют нечеткое множество
называют нечеткое множество
 |
( 6.5) |
Объединением нечетких множеств и называют нечеткое множество
 |
( 6.6) |
Продемонстрируем операции над множествами средствами программы MathCad.
Пример 6.5
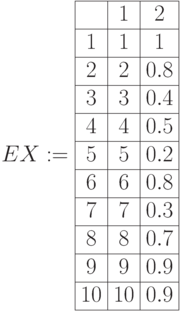
Приводим листинги операций дополнения, пересечения, объединения для нечетких множеств в виде матриц примера 6.1. (рис.6.7, рис. 6.8):
Дополнения нечетких множеств.  – единичная матрица.
– единичная матрица.

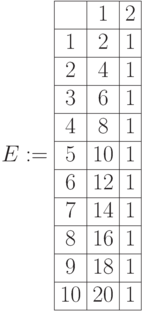 ,
,
 ,
,
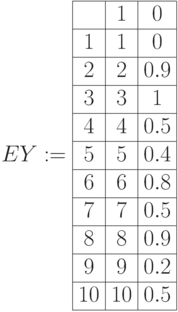
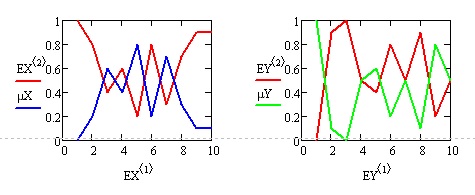
Рис.
6.7.
Дополнения нечетких множеств X и Y. E – единичная матрица


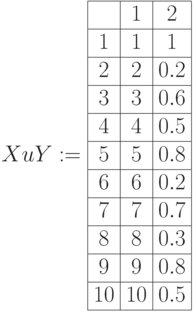 ,
,
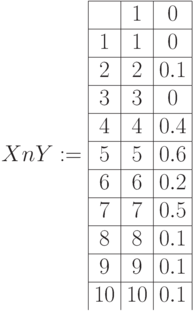
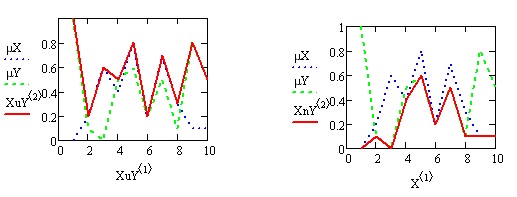
Рис.
6.8.
Пересечение и объединение нечетких множеств X и Y
Пример 6.6
Приводим листинги операций дополнения, пересечения, объединения для нечетких множеств примера 6.2 с треугольными функциями принадлежности. (рис.6.9, рис. 6.10,6.11 )
Дополнение множеств 
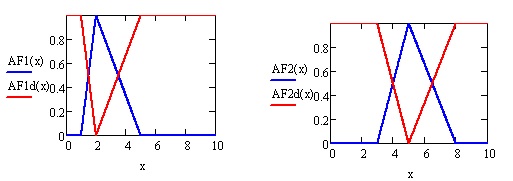
Рис.
6.9.
Дополнение нечетких множеств с треугольными функциями принадлежности
Объединение и пересечение множеств 
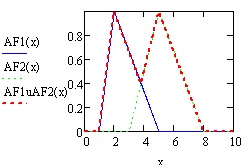
Рис.
6.10.
Объединение нечетких множеств с треугольными функциями принадлежности
Пересечение множеств 
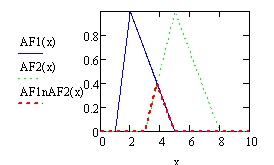
Рис.
6.11.
Пересечение нечетких множеств с треугольными функциями принадлежности
Расстояние между множествами
Чтобы определить расстояние между элементами множества  , надо наложить метрику на это множество. Рассмотрим следующие метрики. Математическим прообразом реального трехмерного пространства является пространство Евклида. Пространство Евклида обозначают обычно
, надо наложить метрику на это множество. Рассмотрим следующие метрики. Математическим прообразом реального трехмерного пространства является пространство Евклида. Пространство Евклида обозначают обычно  . Для линейных дискретных пространств, особенностью которых является то, что координаты векторов могут принимать лишь дискретные значения, известно пространство Хемминга. Если рассмотреть функции принадлежности всех множеств на универсальном множестве , то они образуют функциональное множество всех функций, определенных на , и принимающих значения на отрезке
. Для линейных дискретных пространств, особенностью которых является то, что координаты векторов могут принимать лишь дискретные значения, известно пространство Хемминга. Если рассмотреть функции принадлежности всех множеств на универсальном множестве , то они образуют функциональное множество всех функций, определенных на , и принимающих значения на отрезке ![[0, 1]](https://intuit.ru/sites/default/files/tex_cache/264884439b70ab09a86bc848421c6de6.png) . Метрика на множестве
. Метрика на множестве  — это функция
— это функция  , сопоставляющая каждой паре элементов
, сопоставляющая каждой паре элементов  действительное число по правилу выбранного пространства.
действительное число по правилу выбранного пространства.
Чтобы найти расстояние между множествами и  используются метрики, представленные в таблице 6.2:
используются метрики, представленные в таблице 6.2:
Пример. 6.7
Для нечетких множеств и примера 6.1. построим расстояние между множествами в среде MathCad. Обозначим  – расстояние по Хеммингу,
– расстояние по Хеммингу,  — расстояние по Евклиду (см. рис. 6.2):
— расстояние по Евклиду (см. рис. 6.2):
 ,
, 
 ,
, 
Определение понятия «обычное множество, ближайшее к нечеткому»
Обычным множеством, ближайшим к нечеткому множеству  с функцией принадлежности
с функцией принадлежности  , называют подмножество
, называют подмножество  множества , характеристическая функция которого имеет вид:
множества , характеристическая функция которого имеет вид:
 |
( 6.7) |
Геометрический смысл понятия «обычное множество , ближайшее к нечеткому множеству » иллюстрирует рис. 6.12.
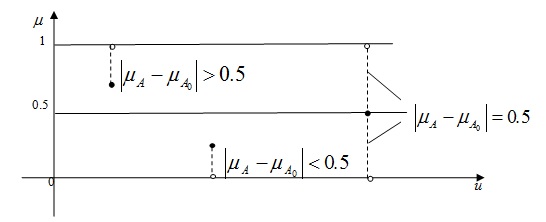
Рис.
6.12.
Множество, ближайшее к нечеткому
Значения  при различном расположении точек графиков функций:
при различном расположении точек графиков функций:
 — функция
— функция  ,
,  — функция
— функция 
Как видно на рисунке, справедливы неравенства

 независимо от того
независимо от того  или
или 
Если — обычное множество, то оно является ближайшим к самому себе. Это следует непосредственно из определения.
Пример 6.8
Для множеств и примера 6.1 построим в MathCad множества  и
и  – ближайшие к нечетким, воспользуемся встроенной функцией
– ближайшие к нечетким, воспользуемся встроенной функцией
if (условие, результат1, результат2)
результат 1 – если условие выполнено, результат 2 в противном случае.
 – множества ближайшие к нечетким и
– множества ближайшие к нечетким и
 ,
, 
 ,
, 
 ,
,
Напомним,
что
в точечном евклидовом пространстве En
расстояние
между точками
P(x1,
x2,…
xn),
Q(y1,
y2,…
yn)
вычисляется по формуле
(P,
Q)
= ,
если
координаты точек заданы относительно
ортонормированной системы координат.
Мы можем рассматривать это расстояние,
как функцию, сопоставляющую двум точкам
P
и Q
число (P,
Q).
Функция
обладает следующими свойствами:
1.
(P,
Q)
=
(Q,
P);
2.
(P,
Q)
+
(Q,
R)
(P,
R)
(неравенство треугольника);
3.
(P,
Q)
0, и (P,
Q)
=
0
P
=
Q.
Пусть
теперь M
– произвольное множество, элементы
которого будем называть точками. Пусть
на M
задана функция ,
сопоставляющая любым двум точкам P,
QM
число (P,
Q),
которое называется расстоянием между
этими точками, и такая что выполнены
свойства (аксиомы) 1,
2,
3.
Тогда пара (M,
)
называется метрическим
пространством,
а функция
– метрикой.
Примеры
1. Пусть V
– произвольное подмножество евклидова
пространства. Расстояние между двумя
точками P,
QV
будем считать
таким же, как во всем пространстве. Тогда
(V,
)
– метрическое пространство. Метрика
называется
индуцированной
из En.
2
.
Сфера S2
в трехмерном геометрическом пространстве.
Расстояние 1
между P,
Q
S2
определяется
как длина кратчайшей кривой по поверхности,
соединяющей P
и Q.
Как известно, этой кривой
является дуга большой окружности
(у которой радиус равен радиусу сферы).
Мы
также можем определить расстояние
как в примере 1: (P,
Q)
– это длина
хорды PQ.
Тогда (S2,
1)
и (S2,
)
– это разные метрические пространства.
3.
Определим
на плоскости расстояние между точками
A(x1,
y1),
B(x2,
y2)
по формуле 2(A,
B)=|x2
x1|+|y2
y1|.
Получается, что 2(A,
B)
равно длине ломаной AMB,
изображённой на следующем чертеже.
У
пражнение.
Самостоятельно
про-верьте, что для плоскости с метрикой
2
выполняются
все аксиомы метрического пространства.
Диаметром
множества
V
в метрическом пространстве (M,
)
называется
точная верхняя грань расстояний между
точками этого множества:
d(V)
= sup;sdo10(P
(P,
Q).
Расстоянием
между двумя множествами
V,
W
называется
точная нижняя грань расстояний между
точками этих множеств:
(V,
W)
= inf;sdo10(P(V
(P,
Q).
В
частности, если одно из множеств состоит
из одной точки, то получаем определение
расстояния
от точки до множества.
П
очему
в этом определении супрэмум, а не
максимум, инфинум, а не минимум? Поясним
на примере.
Пример.
Пусть V
– это открытый (без границы) круг радиуса
1 на плоскости с центром в начале
координат, а W
= Q(2,0).
Тогда d(V)
= 2,
хотя таких точек, расстояние между
которыми равно 2 в V
нет. Таким образом, максимум не
достигается. Аналогично, (Q,
V)
= 1,
хотя такой точки PV,
что (Q,
P)
= 1
не существует. Значит, минимум не
достигается.
Отметим,
что если множества пересекаются, то
расстояние между ними равно нулю.
Обратное неверно. Например, если W
есть прямая x
=
1, то (V,
W)
= 0,
но V
W=.
Определение.
Множество V
в метрическом пространстве (M,
)
называется
ограниченным,
если d(V)<.
Заметим,
что и всё метрическое пространство
может быть ограниченным, как например,
(S2,
1).
Упражнение.
Чему равны
диаметры метрических пространств (S2,
1)
и (S2,
)?
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Пусть
A
,
B
и
C
– конечные нечеткие множества, заданные на универсальном множестве
X
. Введем понятие расстояния
ρ
A
,
B
между нечеткими множествами. При введении расстояния обычно предъявляются следующие требования:
-
ρ
A
,
B≥
0
– неотрицательность; -
ρ
A
,
B=
ρB
,
A– симметричность;
-
ρ
A
,
B≤
ρA
,
C+
ρB
,
C– транзитивность;
-
ρ
A
,
A=
0
– самоподобие.
Расстояние Хемминга(линейное расстояние) определяется как:
ρ
A
,
B
=
∑
i
=
1
n
μ
A
x
i
−
μ
B
x
i
,
0
≤
ρ
A
,
B
≤
n
.
Относительное расстояние Хемминга определяется как:
ρ
rel
A
,
B
=
1
n
∑
i
=
1
n
μ
A
x
i
−
μ
B
x
i
=
1
n
ρ
A
,
B
,
0
≤
ρ
rel
A
,
B
≤
1
.
Евклидово (квадратичное расстояние) определяется как:
e
A
,
B
=
∑
i
=
1
n
μ
A
x
i
−
μ
B
x
i
2
,
0
≤
e
A
,
B
≤
n
.
Относительное Евклидово расстояние определяется как:
e
rel
A
,
B
=
1
n
∑
i
=
1
n
μ
A
x
i
−
μ
B
x
i
2
=
e
A
,
B
n
,
0
≤
e
rel
A
,
B
≤
1
.
В случае бесконечных счетных нечетких множеств
A
,
B
расстояние Хемминга и квадратичное расстояние определяются аналогично, с учетом сходимости соответствующих сумм:
ρ
A
,
B
=
lim
n
→
∞
∑
i
=
1
n
μ
A
x
i
−
μ
B
x
i
,
ρ
rel
A
,
B
=
lim
n
→
∞
1
n
∑
i
=
1
n
μ
A
x
i
−
μ
B
x
i
,
e
A
,
B
=
lim
n
→
∞
∑
i
=
1
n
μ
A
x
i
−
μ
B
x
i
2
,
e
rel
A
,
B
=
lim
n
→
∞
1
n
∑
i
=
1
n
μ
A
x
i
−
μ
B
x
i
2
.
В случае бесконечных несчетных нечетких множеств
A
,
B
, с ограниченным носителем
a
;
b
, расстояние Хемминга и квадратичное расстояние определяются следующим образом:
ρ
A
,
B
=
∫
a
b
μ
A
x
−
μ
B
x
dx
,
ρ
rel
A
,
B
=
1
b
−
a
∫
a
b
μ
A
x
−
μ
B
x
dx
,
e
A
,
B
=
∫
a
b
μ
A
x
−
μ
B
x
2
dx
,
e
rel
A
,
B
=
1
b
−
a
∫
a
b
μ
A
x
−
μ
B
x
2
dx
.
В случае бесконечных несчетных нечетких множеств
A
,
B
, носители которых неограниченны (варианты
−
∞
;
a
,
a
;
∞
,
−
∞
;
+
∞
, расстояние Хемминга и квадратичное расстояние определяются аналогично с условием сходимости соответствующих несобственных
интегралов:
ρ
A
,
B
=
∫
−
∞
a
μ
A
x
−
μ
B
x
dx
,
ρ
A
,
B
=
∫
a
∞
μ
A
x
−
μ
B
x
dx
,
ρ
A
,
B
=
∫
−
∞
∞
μ
A
x
−
μ
B
x
dx
,
e
A
,
B
=
∫
−
∞
a
μ
A
x
−
μ
B
x
2
dx
,
e
A
,
B
=
∫
a
∞
μ
A
x
−
μ
B
x
2
dx
,
e
A
,
B
=
∫
−
∞
∞
μ
A
x
−
μ
B
x
2
dx
.
При задании несчетных нечетких множеств с неограниченными носителями относительные оценки
ρ
rel
A
,
B
и
e
rel
A
,
B
в качестве меры расстояний между нечеткими множествами не используются. Однако, если это необходимо, то относительную меру
расстояния можно ввести, используя другое определение или другое понятие сходимости [26].
Выбор того или иного расстояния – абсолютного или относительного, Хемминга или Евклидова зависит от природы рассматриваемой
проблемы. Каждое из этих расстояний обладает определенными преимуществами и недостатками, которые становятся очевидными при
практическом решении той или иной технической задачи. В зависимости от специфики решаемой проблемы для нечетких множеств можно
ввести и другие понятия меры расстояния [17], [26].
Пример.
A
=
0,1
/
1
+
0,5
/
2
+
1
/
3
,
B
=
0,2
/
2
+
1
/
3
+
0,7
/
4
.
ρ
A
,
B
=
0,1
−
0
+
0,5
−
0,2
+
1
−
1
+
0
−
0,7
=
0,1
+
0,3
+
0
+
0,7
=
1,1
.
ρ
rel
A
,
B
=
1
4
0,1
−
0
+
0,5
−
0,2
+
1
−
1
+
0
−
0,7
=
1
4
0,1
+
0,3
+
0
+
0,7
=
0,
275
.
e
A
,
B
=
0,1
−
0
2
+
0,5
−
0,2
2
+
1
−
1
2
+
0
−
0,7
2
=
0,
01
+
0,
09
+
0
+
0,
49
=
0,
768
.
e
rel
A
,
B
=
0,1
−
0
2
+
0,5
−
0,2
2
+
1
−
1
2
+
0
−
0,7
2
4
=
0,
01
+
0,
09
+
0
+
0,
49
4
=
0,
384
.
Введем далее индекс нечеткостиили показатель размытости нечеткого множества. Если объект
x
обладает свойством
R
, порождающим нечеткое множество
A
лишь в частной мере, т.е.
0
≤
μ
A
x
≤
1
, то внутренняя неопределенность, двусмысленность объекта
x
в отношении свойства
R
проявляется в том, что он, хотя и в разной степени, принадлежит сразу двум противоположным классам: классу объектов
A
, обладающих свойством
R
, и классу объектов
A
ˉ
, не обладающих свойством
R
. Эта двусмысленность максимальна, когда степени принадлежности объекта обеим классам равны, т.е.
μ
A
x
=
μ
A
ˉ
x
=
0,5
, и минимальна, когда объект принадлежит только одному классу, т.е. либо
μ
A
x
=
1
и
μ
A
ˉ
x
=
0
, либо
μ
A
x
=
0
и
μ
A
ˉ
x
=
1
. В общем случае показатель размытости нечеткого множества
A
можно определить в виде функционала
d
A
, удовлетворяющего следующим условиям:
-
d
A
=
0
тогда, когдаA
– обычное множество сμ
Ax
∈
0
;
1;
-
d
A
максимально тогда, когда
μ
Ax
=
0,5
для всех∀
x
∈
X
; -
d
A
≤
dB
, если
A
является заострением
B
, т.е. выполняется
μ
A
x
≤
μ
B
x
,
если
μ
B
x
<
0,5
,
μ
A
x
≥
μ
B
x
,
если
μ
B
x
>
0,5
,
μ
A
x
∈
0
;
1
,
если
μ
B
x
=
0,5
;
-
d
A
≤
dA
ˉ– симметричность относительно точек перехода;
-
d
A
∪
B+
dA
∩
B=
dA
+
dB
.
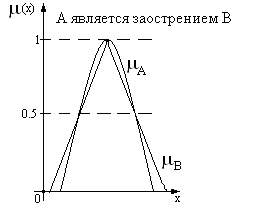
Рис.2.13. Заострение нечеткого множества
Приведенная система аксиом при введении конкретных показателей размытости часто используется частично, т.е., например, ограничиваются
только некоторыми условиями, накладывающими ограничения на функционал
d
A
, либо некоторые условия усиливаются или ослабляются в зависимости от решаемой задачи. Обычно оперируют индексами нечеткости
(показателями размытости), которые можно определить, используя понятие расстояния.
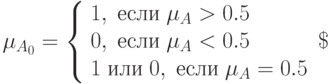
Обычное множество, ближайшее к нечеткому. Пусть
A
– нечеткое множество, определенное на универсальном множестве
X
. Какое обычное множество
A
ˉ
⊂
X
является ближайшим к
A
, т.е. находится на наименьшем евклидовом расстоянии от нечеткого множества
A
? Такое множество будет обладать следующей характеристической функцией:
μ
A
—
x
i
=
0,
если
μ
A
x
i
≤
0,5
,
1,
если
μ
A
x
i
>
0,5
.
Обычно принимают
μ
A
—
x
i
=
0
если
μ
A
x
i
=
0,5
. Используя понятие обычного множества, ближайшего к нечеткому, введем следующие индексы нечеткости нечеткого множества
A
.
Линейный индекс нечеткости:
-
d
A
=
2
nρ
A
,A
ˉдля конечного нечеткое множества
A
; -
d
A
=
lim
n
→
∞2
n∑
i
=
1n
μ
Ax
i−
μ
A
—x
iдля бесконечного счетного нечеткого множества
A
; -
d
A
=
2
b
−
a∫
a
bμ
Ax
i−
μ
A
—x
idx
для бесконечного несчетного нечеткого множества
A
с носителемa
;
b.
Квадратичный индекс нечеткости:
-
d
A
=
2
n
e
A
,A
ˉдля конечного нечеткое множества
A
; -
d
A
=
lim
n
→
∞2
n
∑
i
=
1n
μ
Ax
i−
μ
A
—x
i2
для бесконечного счетного нечеткого множества
A
; -
d
A
=
2
b
−
a∫
a
bμ
Ax
i−
μ
A
—x
i2
dx
для бесконечного несчетного нечеткого множества
A
с носителемa
;
b.
Линейный и квадратичный индексы нечеткости нечеткого множества
A
можно определить, используя операцию дополнения.
Линейный индекс нечеткости с дополнением:
-
d
A
=
2
n∑
i
=
1n
min
μ
Ax
i;
μ
A
ˉx
iдля конечного нечеткого множества
A
; -
d
A
=
lim
n
→
∞2
n∑
i
=
1n
min
μ
Ax
i;
μ
A
ˉx
iдля бесконечного счетного нечеткого множества
A
; -
d
A
=
2
b
−
a∫
a
bmin
μ
Ax
;
μ
A
ˉx
dx
для бесконечного несчетного нечеткого множества
A
с носителемa
;
b.
Квадратичный индекс нечеткости с дополнением:
-
d
A
=
2
n
∑
i
=
1n
min
μ
A
2x
i;
μ
A
ˉ2
x
i– для конечного нечеткое множества
A
; -
d
A
=
lim
n
→
∞2
n
∑
i
=
1n
min
μ
A
2x
i;
μ
A
ˉ2
x
i– для бесконечного счетного нечеткого множества
A
; -
d
A
=
2
b
−
a∫
a
bmin
μ
A
2x
;
μ
A
ˉ2
x
dx
– для бесконечного несчетного нечеткого множества
A
с носителемa
;
b.
С ближайшим обычным множеством связаны свойства:
-
A
∩
Bˉ
=
A
ˉ∩
B
ˉ;
-
A
∪
Bˉ
=
A
ˉ∪
B
ˉ;
-
∀
x
∈
X
:μ
Ax
−
μ
A
—x
=
μ
A
∩A
ˉx
.
На основании последнего свойства линейный индекс нечеткости можно представить в следующем виде:
d
A
=
2
n
∑
i
=
1
n
∣
μ
A
x
i
−
μ
A
—
x
i
∣
=
2
n
∑
i
=
1
n
μ
A
∩
A
ˉ
x
i
,
откуда следует, что линейный индекс нечеткости нечеткого подмножества равен линейному индексу нечеткости дополнения этого
нечеткого подмножества, т.е.
d
A
=
d
A
_
. Следовательно, операции пересечения и объединения не дают эффекта увеличения или понижения нечеткости.
Векторный индикатор нечеткости – это нечеткое множество с функцией принадлежности
2μ
A
∩
A
ˉ
x
.
Если система может пребывать в
N
различных состояниях с вероятностями
p
1
…
p
N
, то энтропия системы определяется как:
H
p
1
,
…
,
p
N
=
−
∑
i
=
1
N
p
i
ln
p
i
.
Энтропия минимальна
H
=
0
при достоверно известном и неизменном состоянии системы, т.е. когда для одного из состояний
p
r
=
1
,
1
≤
r
≤
N
, а для остальных состояний
p
i
=
0
,
i
≠
r
,
i
∈
1
;
2
;
.
.
.
;
N
−
1
;
N
. Энтропия максимальна
H
=
ln
N
при равновероятных состояниях системы
p
1
=
p
2
=
…
=
p
N
=
1
N
. Таким образом, мерой неопределенности состояния системы может служить следующая характеристика, меняющаяся в интервале
0
≤
H
≤
1
:
H
p
1
,
…
,
p
N
=
−
1
ln
N
∑
i
=
1
N
p
i
ln
p
i
Если нечеткое множество
A
задано на конечном счетном универсальном множестве
X
, то степень нечеткости данного нечеткого множества можно оценить через энтропию. При этом для всех
N
элементов носителя нечеткого множества
S
A
вводится частота:
π
A
x
i
=
μ
A
x
i
∑
i
=
1
N
μ
A
x
i
,
i
=
1
…
N
.
Очевидно, что
∑
i
=
1
N
π
A
x
i
=
1
. Это позволяет рассматривать введенную частоту как аналог вероятности и по аналогии посчитать энтропию нечеткости данного
множества:
H
π
A
x
1
,
…
,
π
A
x
N
=
−
1
ln
N
∑
i
=
1
N
π
A
x
i
ln
π
A
x
i
.
Методы Оптимизации. Даниил Меркулов. Отделимость. Проекция. Опорная гиперплоскость
Interior
Внутренность множества
Внутренностью множества $S$ называется следующее множество:
$$mathbf{int} (S) = {mathbf{x} in S mid exists varepsilon > 0, B(mathbf{x}, varepsilon) subset S}$$
где $B(mathbf{x}, varepsilon) = mathbf{x} + varepsilon B$ — шар с центром в т.$mathbf{x}$ и радиусом $varepsilon$
Относительная внутренность множества
Относительной внутренностью множества $S$ называется следующее множество:
$$mathbf{relint} (S) = {mathbf{x} in S mid exists varepsilon > 0, B(mathbf{x}, varepsilon) cap mathbf{aff} (S) subseteq S}$$

- Любое непустое выпуклое множество $S subseteq mathbb{R}^n$ имеет непустую относительную внутренность $mathbf{relint}(S)$
Projection
Расстояние между точкой и множеством
Расстоянием $d$ от точки $mathbf{y} in mathbb{R}^n$ до замкнутого множества $S subset mathbb{R}^n$ является:
$$d(mathbf{y}, S, | cdot |) = inf{|x — y| mid x in S }$$
Проекция точки на множество
Проекцией точки $mathbf{y} in mathbb{R}^n$ на множество $S subseteq mathbb{R}^n$ называется точка $pi_S(mathbf{y}) in S$: $$| pi_S(mathbf{y}) — mathbf{y}| le |mathbf{x} — mathbf{y}|, forall mathbf{x} in S$$
- Если множество — открыто, и точка в нем не лежит, то её проекции на это множество не существует
- Если точка лежит в множестве, то её проекция — это сама точка
- $$pi_S(mathbf{y}) = underset{mathbf{y}}{operatorname{argmin}} |mathbf{x}-mathbf{y}|$$
- Пусть $S subseteq mathbb{R}^n$ — выпуклое замкнутое множество. Пусть так же имеются точки $mathbf{y} in mathbb{R}^n$ и $mathbf{pi} in S$. Тогда если для всех $mathbf{x} in S$ справедливо неравенство: $$langle pi -mathbf{y}, mathbf{x} — pirangle ge 0, $$ то $pi$ является проекцией точки $mathbf{y}$ на $S$, т.е. $pi_S (mathbf{y}) = pi$
- Пусть $S subseteq mathbb{R}^n$ — афинное множество. Пусть так же имеются точки $mathbf{y} in mathbb{R}^n$ и $mathbf{pi} in S$. Тогда $pi$ является проекцией точки $mathbf{y}$ на $S$, т.е. $pi_S (mathbf{y}) = pi$ тогда и только тогда, когда для всех $mathbf{x} in S$ справедливо равенство: $$langle pi -mathbf{y}, mathbf{x} — pirangle = 0 $$
Пример 1
Найти $pi_S (y) = pi$, если $S = {x in mathbb{R}^n mid |x — x_c| le R }$, $y notin S$
Решение:

-
Из рисунка строим гипотезу: $pi = x_0 + R cdot frac{y — x_0}{|y — x_0|}$
-
Проверяем неравенство для выпуклого замкнутого множества: $(pi — y)^T(x — pi) ge 0$
$$left( x_0 — y + R frac{y — x_0}{|y — x_0|} right)^Tleft( x — x_0 — R frac{y — x_0}{|y — x_0|} right) =$$
$$left( frac{(y — x_0)(R — |y — x_0|)}{|y — x_0|} right)^Tleft( frac{(x-x_0)|y-x_0|-R(y — x_0)}{|y — x_0|} right) =$$
$$frac{R — |y — x_0|}{|y — x_0|^2} left(y — x_0 right)^Tleft( left(x-x_0right)|y-x_0|-Rleft(y — x_0right) right) = $$
$$frac{R — |y — x_0|}{|y — x_0|} left( left(y — x_0 right)^Tleft( x-x_0right)-R|y — x_0| right) =$$
$$left(R — |y — x_0| right) left( frac{(y — x_0 )^T( x-x_0)}{|y — x_0|}-R right)$$
Первый сомножитель отрицателен по выбору точки $y$. Второй сомножитель так же отрицателен, если применить к его записи теорему Коши — Буняковского: $$(y — x_0 )^T( x-x_0) le |y — x_0||x-x_0|$$
$$frac{(y — x_0 )^T( x-x_0)}{|y — x_0|} — R le frac{|y — x_0||x-x_0|}{|y — x_0|} — R = |x — x_0| — R le 0$$
Пример 2
Найти $pi_S (y) = pi$, если $S = {x in mathbb{R}^n mid c^T x = b }$, $y notin S$
Решение:

-
Из рисунка строим гипотезу: $pi = y + alpha c$. Коэффициент $alpha$ подбирается так, чтобы $pi in S$: $c^T pi = b$, т.е.: $$c^T (y + alpha c) = b$$
$$c^Ty + alpha c^T c = b$$
$$c^Ty = b — alpha c^T c$$ -
Проверяем неравенство для выпуклого замкнутого множества: $(pi — y)^T(x — pi) ge 0$
$$(y + alpha c — y)^T(x — y — alpha c) = $$
$$ alpha c^T(x — y — alpha c) = $$
$$ alpha (c^Tx) — alpha (c^T y) — alpha^2 c^Tc) = $$
$$ alpha b — alpha (b — alpha c^T c) — alpha^2 c^Tc = $$
$$ alpha b — alpha b + alpha^2 c^T c — alpha^2 c^Tc = 0 ge 0$$
Пример 3
Найти $pi_S (y) = pi$, если $S = {x in mathbb{R}^n mid Ax = b, A in mathbb{R}^{m times n}, b in mathbb{R}^{m} }$, $y notin S$
Решение:

-
Из рисунка строим гипотезу: $pi = y + sumlimits_{i=1}^malpha_i A_i = y + A^T alpha$. Коэффициент $alpha$ подбирается так, чтобы $pi in S$: $A pi = b$, т.е.: $$c^T (y + A^T alpha) = b$$
$$A(y + A^Talpha) = b$$
$$Ay = b — A A^Talpha$$ -
Проверяем неравенство для выпуклого замкнутого множества: $(pi — y)^T(x — pi) ge 0$
$$(y + A^Talpha — y)^T(x — y — A^Talpha) = $$
$$ alpha^T A(x — y — A^Talpha) = $$
$$ alpha^T (Ax) — alpha^T (A y) — alpha^T AA^T alpha) = $$
$$ alpha^T b — alpha^T (b — A A^Talpha) — alpha^T AA^T alpha = $$
$$ alpha^T b — alpha^T b + alpha^T AA^T alpha — alpha^T AA^T alpha = 0 ge 0$$
Separation
Отделимые множества
Множества $S_1$ и $S_2$ называются отделимыми, если существуют $mathbf{p} neq mathbf{0} in mathbb{R}^n$ и $beta in mathbb{R}$, что:
$$langle mathbf{p}, mathbf{x_1}rangle le beta le langle mathbf{p}, mathbf{x_2}rangle, ;; forall mathbf{x_1} in S_1, ;; forall mathbf{x_2} in S_2$$

Собственно отделимые множества
Множества $S_1$ и $S_2$ называются собственно отделимыми, если они отделимы и дополнительно можно указать такие $mathbf{x_1} in S_1, mathbf{x_2} in S_2$
$$langle mathbf{p}, mathbf{x_1}rangle < langle mathbf{p}, mathbf{x_2}rangle$$

Строго отделимые множества
Множества $S_1$ и $S_2$ называются строго отделимыми, если существует $mathbf{p} neq mathbf{0} in mathbb{R}^n$, что:
$$langle mathbf{p}, mathbf{x_1}rangle < langle mathbf{p}, mathbf{x_2}rangle, ;; forall mathbf{x_1} in S_1, ;; forall mathbf{x_2} in S_2$$

Сильно отделимые множества
Множества $S_1$ и $S_2$ называются сильно отделимыми, если существуют $mathbf{p} neq mathbf{0} in mathbb{R}^n$ и $beta in mathbb{R}$, что:
$$ underset{mathbf{x_1} in S_1}{operatorname{sup}} langle mathbf{p}, mathbf{x_1}rangle < beta < underset{mathbf{x_2} in S_2}{operatorname{inf}}langle mathbf{p}, mathbf{x_2}rangle, ;; forall mathbf{x_1} in S_1, ;; forall mathbf{x_2} in S_2$$


Расстояние между множествами
Расстоянием между множествами $S_1$ и $S_2$ называется число:
$$d(S_1, S_2,| cdot |) = underset{mathbf{x_1} in S_1, mathbf{x_2} in S_2}{operatorname{inf}} |mathbf{x_1} — mathbf{x_2}|$$
- Если $X$ и $Y$ — непустые выпуклые множества в $mathbb{R}^n$ и $X cap Y = emptyset$, тогда $X$ и $Y$ — отделимы.
- Если $X$ — непустое выпуклое замкнутое множество в $mathbb{R}^n$ и $mathbf{y} notin X$, тогда точку $mathbf{y}$ можно строго отделить от множества $X$.
Supporting hyperplane
Опорная гиперплоскость
Гиперплоскость $Gamma_{p,beta} = left{mathbf{x} in mathbb{R}^n : langle p, mathbf{x} rangle > beta right}$ называется опорной к множеству $S$ в граничной точке $mathbf{a} in partial S$, если $$langle p, mathbf{x} rangle ge beta = langle p, mathbf{a} rangle ;; forall mathbf{x} in S$$
Опорная гиперплоскость называется собственно опорной, если, кроме того, можно указать $mathbf{x_0} in S: langle p, mathbf{x_0} rangle > beta$
- В любой граничной (относительно граничной) точке выпуклого множества существует опорная (собственно опорная) гиперплоскость.
- Касательная плоскость к поверхности $F(x) = 0,$ где $F: mathbb{R}^n rightarrow mathbb{R}^1$ в точке $x_0$ определяется уравнением: $$nabla F(x_0)^T(x-x_0) = 0$$
- Касательная плоскость к графику функции $f(x),$ где $f: mathbb{R}^n rightarrow mathbb{R}^1$ в точке $x_0$ определяется уравнением: $$phi(x) = f(x_0) + nabla f(x_0)^T(x-x_0) = 0$$
Пример 4
Построить гиперплоскость, разделяющую $S_1$ и $S_2$:
$$S_1 = left{ x in mathbb{R}^2 mid x_1 x_2 ge 1, x_1 > 0right}, ;;; S_2 = left{ x in mathbb{R}^2 mid x_2 le frac{4}{x_1 — 1} +9right}$$
Решение:
- Найдем $partial S_1 cap partial S_2$:
$$
begin{cases}
x_1 x_2 = 1
x_2 = frac{4}{x_1 — 1} +9
end{cases}
$$
$$
begin{cases}
x_1 = frac{1}{3}
x_2 = 3
end{cases}
$$
т.е. множества пересекаются в точке $x_0 = (frac{1}{3}, 3)$
- Построим касательные плоскости к обеим поверхностям в точке пересечения:
$$
begin{cases}
nabla F_1(x_0)^T(x-x_0) = 0
nabla F_2(x_0)^T(x-x_0) = 0
end{cases}
$$
$$
begin{cases}
3 x_1 + frac{1}{3}x_2 — 2 = 0 \
-6 x_1 — frac{2}{3}x_2 + 4 = 0
end{cases}
$$
Итого, получаем: $9x_1 + x_2 = 6$, т.е. $p = (9,1), beta = 6$
Пример 5
Построить опорную гиперплоскость для множества $S = left{ x in mathbb{R}^2 mid e^{x_1} le x_2right}$ в граничной точке $x_0 = (0,1)$
Решение:
- Имеем поверхность $F(x_1, x_2) = e^{x_1} — x_2, ;;; nabla F = (e^{x_1}, -1), ;;; nabla F(x_0) = (1,-1)$
- Тогда $$nabla F(x_0)^T(x-x_0) = 0$$
$$(1,-1)^T (x_1, x_2 — 1) = 0$$ - Искомая опорная гиперплоскость: $x_1 — x_2 + 1 = 0$
Пример 6
Построить опорную гиперплоскость для множества $S = left{ x in mathbb{R}^3 mid x_3 ge x_1^2 + x_2^2right}$ так, чтобы она отделяла его от точки $x_0 = left(-frac{5}{4}, frac{5}{16}, frac{15}{16}right)$
Решение:
-
Заметим, что здесь $x_0 notin partial S$. А значит, таких гиперплоскостей много. Возможный вариант: искать опорную гиперплоскость в точке $pi_S(x_0) = pi in S$. Значит, $Gamma_{p, beta} = left{ x in mathbb{R}^3 mid p^Tx = beta, p^T pi = beta right}$
-
Будем искать $pi$, решая задачу минимизации:
$$underset{x in partial S}{operatorname{min}}|x — x_0|^2$$
$$underset{x in partial S}{operatorname{min}}(x — x_0)^T(x — x_0)$$
Учитывая структуру множества $partial S = {x in mathbb{R}^3 mid x_3 = x_1^2 + x_2^2}$, можем перейти к задаче безусловной минимизации.
$$ left( x_1 + frac{5}{4} right)^2 + left( x_2 — frac{5}{16} right)^2 + left( x_1^2 + x_2^2 — frac{15}{16} right)^2 rightarrow operatorname{min}$$
Единственным решением которой является точка $pi = left( -1, frac{1}{4}, frac{17}{16}right)$.
- Тогда $p = x_0 — pi = left( -frac{1}{4}, frac{1}{16}, -frac{1}{8}right), ;; beta = p^T pi = frac{17}{128}$
Домашнее задание 3
-
Найти $pi_S (y) = pi$, если $S = {x in mathbb{R}^n mid c^T x ge b }$
-
Найти $pi_S (y) = pi$, если $S = {x in mathbb{R}^n mid x = x_0 + X alpha, X in mathbb{R}^{n times m}, alpha in mathbb{R}^{m}}$, $y notin S$
-
Построить гиперплоскость, разделяющую $S_1$ и $S_2$:
$$S_1 = left{ x in mathbb{R}^n mid x_1^2 + x_2^2 + ldots + x_n^2 le 1right}, ;;; S_2 = left{ x in mathbb{R}^n mid x_1^2 + x_2^2 + ldots + x_{n-1}^2 + 1 le x_n right}$$ -
Построить опорную гиперплоскость для множества $S = left{ x in mathbb{R}^3 mid frac{x_1^2}{4}+frac{x_2^2}{8}+frac{x_3^2}{25} le 1 right}$ в граничной точке $x_0 = left(-1, frac{12}{5}, frac{sqrt{3}}{2}right)$
-
Пусть $S subset mathbb{R}^n$ — замкнутое выпуклое множество, $mathbf{x} in S$. Найти множество $Y subset mathbb{R}^n$ такое, что $forall mathbf{y} in Y$ выполнено $mathbf{x} = pi_S(mathbf{y})$
-
Пусть даны $mathbf{x} in mathbb{R}^n$ и выпуклый конус $K subseteq mathbb{R}^n$. Пусть $Y = mathbf{x} + K$, $mathbf{y} in Y$. Найти множество $X subset mathbb{R}^n,$ такое, что $mathbf{x} in X, forall mathbf{y} in Y: x = pi_X(mathbf{y})$
В качестве решения необходимо предоставить либо:
-
.pdfфайл, сверстанный с помощью $ LaTeX $ с решениями задач -
.ipynbс оформленным решением