Пусть дана система (30) линейных
однородных уравнений с коэффициентами
из поля Р.
-

(30)
Так как столбец свободных членов в
матрице А1 этой системы
состоит только из нулей, то rang
A = rang
A1, т.е.
система линейных однородных уравнений
всегда совместна. В частности она
всегда имеет нулевое решение. Рассмотрим
множество всех возможных решений
системы (30).

Пусть
=(1,
2,
… , n)
и
=(1,
2,
… , n)
– любые два из них. Их можно рассматривать,
как векторы в арифметическом n-мерном
пространстве над полем Р. Пусть
– любой
элемент поля Р. Тогда
+ =
(1 +
1,
2
+ 2,
… , n
+ n
),
= (1,
2,
… , n).
Подставим компоненты этих векторов
в произвольное s-е уравнение системы
(30). Получим
![]()
![]()
Итак, если
и
– любые два решения системы (30) и
– любой
элемент поля Р, то
+ и
тоже являются решением этой системы.
Но тогда из теоремы 14 следует
Теорема 27. Множество решений
системы линейных однородных уравнений
с n переменными есть линейное
подпространство арифметического
пространства Аn .
Теорема 28. Размерность
пространства решений системы линейных
однородных уравнений равна n –
r, где n – число неизвестных, r
– ранг матрицы системы.
Доказательство. Пусть L
– пространство решений системы (30).
Тогда L Аn
. Пусть =
(1,
2,
… r,
r+1,
… , n)
– произвольное решение системы. Пусть
(r+1,
… , n)
– набор свободных неизвестных,
соответствующий этому решению. Множество
всех возможных наборов свободных
неизвестных есть арифметическое (n –
r)-мерное пространство Аn–r
. Зададим отображение :
L Аn–r
по правилу
= (1,
2,
… r,
r+1,
… , n)
()
= (r+1,
… , n).
Покажем, что
– изоморфизм (определение 24). Для этого
нужно проверить три условия.
1. Покажем, что
– взаимнооднозначное отображение.
Решению =
(1,
2,
… r,
r+1,
… , n)
соответствует только один набор (r+1,
… , n),
следовательно,
– однозначное отображение. Обратно,
если задать элемент (r+1,
… , n)
из Аn–r , то по
теореме Крамера найдётся только один
набор (1,
2,
… r
) искомых неизвестных, т.е. каждый элемент
()
из Аn–r соответствует
единственному элементу из L .
2. ()
= (r+1,
… , n
) = (r+1,
… , n
) = (а).
3. (а +
в) = (r+1
+ r+1,
… ,n
+ n
) = (r+1,
… , n)
+ (r+1,
… , n
) = (а)
+ (в).
Итак, пространство решений системы
линейных однородных уравнений изоморфно
арифметическому (n – r)-мерному
пространству. Следовательно, размерность
L
равна (n – r).
Определение 29. Базис пространства
решений системы линейных однородных
уравнений называется её фундаментальной
системой решений.
Так как при изоморфизме базис
пространства Аn–r
соответствует базису пространства L
, то для того. чтобы найти фундаментальную
систему решений для системы (30), достаточно
выбрать (n – r) линейно независимых
наборов свободных неизвестных и для
каждого из них найти решение данной
системы.
Следствие. Если а1,
а2, …, аn–r
фундаментальная система решений
системы линейных однородных уравнений
(30) и С1, С2,
… , Сn–r
– произвольные
элементы поля Р, то С1а1
+ С2а2
+ … + Сn–r
аn–r
– общее решение
этой системы.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Размерность пространства решений однородной системы линейных уравнений
Как мы отметили ранее, совокупность решений Xодн однородной системы линейных уравнений с матрицей  является линейным пространством, подпространством в Kn.
является линейным пространством, подпространством в Kn.
Теорема 9.17.1. Если r=r(A)<n, то  (т. е. размерность пространства решений равна числу свободных неизвестных). (Если r(A)=n, то система линейных уравнений имеет лишь нулевое решение.)
(т. е. размерность пространства решений равна числу свободных неизвестных). (Если r(A)=n, то система линейных уравнений имеет лишь нулевое решение.)
Доказательство. Для удобства записи переупорядочим неизвестные, если это необходимо, так, чтобы

Пусть  — единичная матрица размера
— единичная матрица размера  . Возьмем ее строки в качестве наборов значений для свободных неизвестных и дополним их (единственно возможным способом) до решений нашей системы линейных уравнений
. Возьмем ее строки в качестве наборов значений для свободных неизвестных и дополним их (единственно возможным способом) до решений нашей системы линейных уравнений
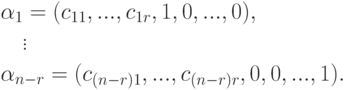
Эта система n-r строк-решений линейно независима (поскольку строки единичной матрицы, конечно, линейно независимы). Если

произвольное решение, то

Однако, конечно,

при этом  и нулевое решение имеют одинаковый набор значений для свободных неизвестных. Так как значения главных неизвестных однозначно определяются по свободным, то
и нулевое решение имеют одинаковый набор значений для свободных неизвестных. Так как значения главных неизвестных однозначно определяются по свободным, то  , следовательно,
, следовательно,

Итак, мы построили базис  линейного пространства решений Xодн , поэтому
линейного пространства решений Xодн , поэтому  .
.
Замечание 9.17.2. Если вместо строк единичной матрицы En-r для свободных неизвестных брать строки всевозможных матриц  (т. е.
(т. е.  ,
,  ), то этот алгоритм позволяет построить все базисы в Xодн .
), то этот алгоритм позволяет построить все базисы в Xодн .
Замечание 9.17.2. Любой базис линейного пространства решений Xодн однородной системы линейных уравнений называется в ряде алгебраических текстов » фундаментальной системой решений однородной системы линейных уравнений «.
Задание любого подпространства в _K V = K^n как пространства решений однородной системы линейных уравнений
Пусть K — поле,  ,
,  — подпространство в Kn, являющееся линейной оболочкой строк u1,…,um, т. е. множеством всех линейных комбинаций строк u1,…,um. Мы найдем такую матрицу
— подпространство в Kn, являющееся линейной оболочкой строк u1,…,um, т. е. множеством всех линейных комбинаций строк u1,…,um. Мы найдем такую матрицу  , что множество решений однородной системы линейных уравнений
, что множество решений однородной системы линейных уравнений
совпадает с U.
Если U — нулевое подпространство, то в качестве A мы можем взять любую матрицу  с ненулевым определителем (например, A=E ). Если U=Kn (это эквивалентно тому, что
с ненулевым определителем (например, A=E ). Если U=Kn (это эквивалентно тому, что  ), то в качестве A мы можем взять нулевую матрицу из Ms,n,
), то в качестве A мы можем взять нулевую матрицу из Ms,n,  . Если же
. Если же  , то пусть ui=(ui1,ui2,…,uin),
, то пусть ui=(ui1,ui2,…,uin),  ,
,  .
.
Рассмотрим матрицу  , B=(bij), bij=uij, ,
, B=(bij), bij=uij, ,  , и однородную систему линейных уравнений
, и однородную систему линейных уравнений
 |
( 9.2) |
Ясно, что  , поэтому
, поэтому  . Размерность s пространства решений X_одн этой системы равна n-r, и так как
. Размерность s пространства решений X_одн этой системы равна n-r, и так как  , то
, то  .
.
Пусть строки  образуют фундаментальную систему решений системы (9.2), vi=(vi1,…,vin),
образуют фундаментальную систему решений системы (9.2), vi=(vi1,…,vin),  ,
,  . Пусть
. Пусть  , A=(aij), aij=vij, , . Покажем, что A — искомая матрица.
, A=(aij), aij=vij, , . Покажем, что A — искомая матрица.
Действительно, по построению матрицы A любая строка из U (как линейная комбинация строк u1,…,um ) является решением однородной системы уравнений
 |
( 9.3) |
т. е.  . С другой стороны,
. С другой стороны,

Следовательно, U=Xодн.
В заключение отметим, что матрица A определена неоднозначно. Например, другая матрица A’ может быть получена с помощью другой фундаментальной системы решений системы (9.2).
Полученное задание линейных подпространств оказывается полезным при решении ряда практических задач. Например, пусть  — линейно независимые строки, m<n. Требуется найти такие строки um+1,…,un, что {u1,…,un} — базис линейного пространства Rn. Как и выше, пусть v1,…,vs — какая-нибудь фундаментальная система решений системы (9.2) (в нашем случае
— линейно независимые строки, m<n. Требуется найти такие строки um+1,…,un, что {u1,…,un} — базис линейного пространства Rn. Как и выше, пусть v1,…,vs — какая-нибудь фундаментальная система решений системы (9.2) (в нашем случае  , s=n-m ). Положим um+1=v1,…,un=vn-m. Покажем, что {u1,…,un} — базис в Rn. Достаточно показать, что строки u1,…,un линейно независимы над R. Пусть
, s=n-m ). Положим um+1=v1,…,un=vn-m. Покажем, что {u1,…,un} — базис в Rn. Достаточно показать, что строки u1,…,un линейно независимы над R. Пусть  и
и  . Тогда для строки
. Тогда для строки

имеем  , где
, где  . Если z=(z1,…,zn),
. Если z=(z1,…,zn),  ,
,  , то по построению подпространств U и
, то по построению подпространств U и  (см. (9.2), (9.3)) имеем
(см. (9.2), (9.3)) имеем
 , следовательно, z1=…=zn=0, и
, следовательно, z1=…=zn=0, и  . Значит,
. Значит,

Но u1,…,um — линейно независимые строки, поэтому  . Строки um+1,…,un также линейно независимы, следовательно,
. Строки um+1,…,un также линейно независимы, следовательно,  . Итак,
. Итак,  и строки u1,…,un линейно независимы.
и строки u1,…,un линейно независимы.
Таким образом, мы рассмотрели два способа задания линейных подпространств в K V=Kn :
- как множество решений Xодн однородной системы линейных уравнений;
- как линейную оболочку
 строк .
строк .
 строк
строк При этом мы научились переходить от первого задания ко второму (фундаментальная система решений) и от второго задания к первому. Первый способ задания удобен для задания пересечения  подпространств (надо к первой однородной системе уравнений приписать вторую). Второй способ задания удобен для задания суммы подпространств:
подпространств (надо к первой однородной системе уравнений приписать вторую). Второй способ задания удобен для задания суммы подпространств:

В следующем примере мы увидим комбинацию этих приемов.
Пример 9.18.1. Пусть  (линейная оболочка строк u1=(1,1,0,0), u2=(0,1,1,0), u3=(0,0,1,1) ),
(линейная оболочка строк u1=(1,1,0,0), u2=(0,1,1,0), u3=(0,0,1,1) ),  (линейная оболочка строк v1=(1,0,1,0), v_2=(0,2,1,1), v3=(1,2,1,2) ). Необходимо найти базисы линейных пространств V1+V2 и
(линейная оболочка строк v1=(1,0,1,0), v_2=(0,2,1,1), v3=(1,2,1,2) ). Необходимо найти базисы линейных пространств V1+V2 и  , при этом строки u1, u2, u3, v1, v2, v3 выразить через базис пространства V1+V2.
, при этом строки u1, u2, u3, v1, v2, v3 выразить через базис пространства V1+V2.
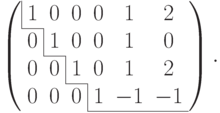
Решение Запишем строки u1, u2, u3, v1, v2, v3 по столбцам и приведем полученную матрицу к ступенчатому виду с помощью элементарных преобразований строк:
![begin{mult}
begin{gathered}
u_1 u_2 u_3,, ! v_1 v_2 v_3 kern53mm
\
left(
begin{array}{cccccc}
1 & 0 & 0 & 1 & 0 & 1\
1 & 1 & 0 & 0 & 2 & 2\
0 & 1 & 1 & 1 & 1 & 1\
0 & 0 & 1 & 0 & 1 & 2
end{array}right)to
left(
begin{array}{cccccc}
1 & 0 & 0 & phm 1 & 0 & 1\
0 & 1 & 0 & -1 & 2 & 1\
0 & 1 & 1 & phm 1 & 1 & 1\
0 & 0 & 1 & phm 0 & 1 & 2
end{array}right)to{}
end{gathered}
\[3mm]
begin{gathered}
kern55mm u'_1, u'_2, u'_3 v'_1; v'_2; v'_3
\
{}to
left(
begin{array}{cccccc}
1 & 0 & 0 & phm 1 & phm 0 & 1\
0 & 1 & 0 & -1 & phm 2 & 1\
0 & 0 & 1 & phm 2 & -1 & 0\
0 & 0 & 1 & phm 0 & phm 1 & 2
end{array}right)to
left(
begin{array}{cccccc}
multicolumn{1}{|c}{1} & 0 & 0 & phm 1 & phm 0 & phm 1\
cline{1-1}
0 & multicolumn{1}{|c}{1} & 0 & -1 & phm 2 & phm 1\
cline{2-2}
0 & 0 & multicolumn{1}{|c}{1} & phm 2 & -1 & phm 0\
cline{3-3}
0 & 0 & 0 & multicolumn{1}{|c}{phm 1} & -1 & -1\
cline{4-6}
end{array}right).
end{gathered}
end{mult}](https://intuit.ru/sites/default/files/tex_cache/dd0dbbb69869493ca81113a368c90d5a.png)
Поскольку  и элементарные преобразования строк матрицы не меняют линейных соотношений между столбцами, то {u1,u2,u3,v1} — базис в V_1+V_2 (и так как
и элементарные преобразования строк матрицы не меняют линейных соотношений между столбцами, то {u1,u2,u3,v1} — базис в V_1+V_2 (и так как  , то V1+V2= R^4 ). Из ступенчатого вида мы вычисляем v’2 и v’3 через u’1, u’2, u’3, v’1 :
, то V1+V2= R^4 ). Из ступенчатого вида мы вычисляем v’2 и v’3 через u’1, u’2, u’3, v’1 :
Поэтому v’_2=u’_1+u’_2+u’_3-v’_1 и, следовательно, v2=u1+u2+u3-v1. Для v’3 мы видим, что v’3+v’1=(2,0,2,0)*=2u’1+2u’3, поэтому v3=2u1+2u3-v1. Проведенные вычисления равносильны завершению приведения матрицы к главному ступенчатому виду:
Рассмотрим теперь . Для этого найдем однородные системы линейных уравнений, чьи множества решений совпадают с V1 и V2 соответственно.
Для V1:
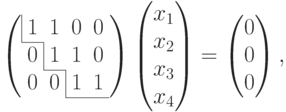
система уже имеет ступенчатый вид, x1, x2, x3 — главные неизвестные, x4 — свободная. Фундаментальная система решений состоит из одной строки (-1,1,-1,1). Итак, подпространство V1 совпадает с пространством решений однородной системы линейных уравнений
 |
( 9.4) |
Для V2 :
![begin{align*} & begin{pmatrix}
1 & 0 & 1 & 0\
0 & 2 & 1 & 1\
1 & 2 & 1 & 2
end{pmatrix}
begin{pmatrix}
x_1\
x_2\
x_3\
x_4
end{pmatrix} =
begin{pmatrix}
0\
0\
0
end{pmatrix} to
begin{pmatrix}
1 & 0 & 1 & 0\
0 & 2 & 1 & 1\
0 & 2 & 0 & 2
end{pmatrix}
begin{pmatrix}
x_1\
x_2\
x_3\
x_4
end{pmatrix} =
begin{pmatrix}
0\
0\
0
end{pmatrix} to{}
\[1mm] & quad {}to
begin{pmatrix}
1 & 0 & 1 & 0\
0 & 2 & 1 & 1\
0 & 1 & 0 & 1
end{pmatrix}
begin{pmatrix}
x_1\
x_2\
x_3\
x_4
end{pmatrix} !=!
begin{pmatrix}
0\
0\
0
end{pmatrix} to!
%{}
%\[3mm]
%& quad {}to
begin{pmatrix}
1 & 0 & 1 & 0\
0 & 1 & 0 & 1\
0 & 2 & 1 & 1
end{pmatrix}
begin{pmatrix}
x_1\
x_2\
x_3\
x_4
end{pmatrix} !=!
begin{pmatrix}
0\
0\
0
end{pmatrix} to{}
\[1mm] & quad {}to
left(
begin{array}{cccc}
multicolumn{1}{|c}{1} & 0 & 1 & phm 0\
cline{1-1}
0 & multicolumn{1}{|c}{1} & 0 & phm 1\
cline{2-2}
0 & 0 & multicolumn{1}{|c}{1} & -1\
cline{3-4}
end{array}right)
begin{pmatrix}
x_1\
x_2\
x_3\
x_4
end{pmatrix} =
begin{pmatrix}
0\
0\
0
end{pmatrix},
end{align*}](https://intuit.ru/sites/default/files/tex_cache/9b3e5cd07c99c5ba9b0cfe865a6061bc.png)
и мы приходим к ступенчатому виду, при этом x1, x2, x3 — главные неизвестные, а x4 — свободная. Фундаментальная система решений состоит из одной строки (-1,-1,1,1). Значит, однородная система линейных уравнений
 |
( 9.5) |
задает подпространство V2.
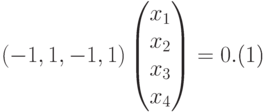
Ясно, что система
задает подпространство .
Решим эту систему:
![begin{align*} & begin{pmatrix}
-1 & phm 1 & -1 & 1\
-1 & -1 & phm 1 & 1
end{pmatrix}
begin{pmatrix}
x_1\
x_2\
x_3\
x_4
end{pmatrix} =
begin{pmatrix}
0\
0
end{pmatrix} to{}
\[1mm] & quad {}to
begin{pmatrix}
phm 1 & -1 & 1 & -1\
-1 & -1 & 1 & phm 1
end{pmatrix}
begin{pmatrix}
x_1\
x_2\
x_3\
x_4
end{pmatrix} =
begin{pmatrix}
0\
0
end{pmatrix} to{}
\[1mm] & quad {}to
left(
begin{array}{cccc}
multicolumn{1}{|c}{1} & -1 & 1 & -1\
cline{1-1}
0 & multicolumn{1}{|c}{-2} & 2 & phm 0\
cline{2-4}
end{array}right)
begin{pmatrix}
x_1\
x_2\
x_3\
x_4
end{pmatrix} =
begin{pmatrix}
0\
0
end{pmatrix},
end{align*}](https://intuit.ru/sites/default/files/tex_cache/514a0838571b1cf6b55788bbade81424.png)
x1, x2 — главные неизвестные, x3, x4 — свободные неизвестные. Фундаментальная система решений состоит из двух строк
Следовательно, {u,v} — базис линейного подпространства .
21. Пространство решений системы линейных однородных уравнений
Пусть дана система (30) линейных однородных уравнений с коэффициентами из поля Р.
 (30)
(30)
Так как столбец свободных членов в матрице А1 этой системы состоит только из нулей, то rang A = rang A1, т. е. система линейных однородных уравнений всегда совместна. В частности она всегда имеет нулевое решение. Рассмотрим множество всех возможных решений системы (30).
Пусть A =(A1, A2, … , An) и B =(B1, B2, … , Bn) – Любые два из них. Их можно рассматривать, как векторы в арифметическом n-мерном пространстве над полем Р. Пусть L – любой элемент поля Р. Тогда A +B = (A1 + B1, A2 + B2, … , An + Bn ), L×A = (LA1, LA2, … , LAn). Подставим компоненты этих векторов в произвольное S-е уравнение системы (30). Получим 
 Итак, если A и B – Любые два решения системы (30) и L – любой элемент поля Р, то A +B И L×A тоже являются решением этой системы. Но тогда из теоремы 14 следует
Итак, если A и B – Любые два решения системы (30) и L – любой элемент поля Р, то A +B И L×A тоже являются решением этой системы. Но тогда из теоремы 14 следует
Теорема 27. Множество решений системы линейных однородных уравнений с N Переменными есть линейное подпространство арифметического пространства Аn .
Теорема 28. Размерность пространства решений системы линейных однородных уравнений равна N – r, Где N – Число неизвестных, r – ранг матрицы системы.
Доказательство. Пусть L – пространство решений системы (30). Тогда L Ì Аn . Пусть A = (A1, A2, … Ar, Ar+1, … , An) – произвольное решение системы. Пусть (Ar+1, … , An) – набор свободных неизвестных, соответствующий этому решению. Множество всех возможных наборов свободных неизвестных есть арифметическое (N – r)-мерное пространство Аn–r . Зададим отображение J: L ® Аn–r по правилу
Покажем, что J – изоморфизм (определение 24). Для этого нужно проверить три условия.
1. Покажем, что J – взаимнооднозначное отображение. Решению A = (A1, A2, … Ar, Ar+1, … , An) соответствует только один набор (Ar+1, … , An), следовательно, J – Однозначное отображение. Обратно, если задать элемент (Ar+1, … , An) из Аn–r , то по теореме Крамера найдётся только один набор (A1, A2, … Ar ) искомых неизвестных, т. е. каждый элемент J(A) из Аn–r соответствует единственному элементу из L .
Итак, пространство решений системы линейных однородных уравнений изоморфно арифметическому (N – r)-мерному пространству. Следовательно, размерность L равна (N – r).
Определение 29. Базис пространства решений системы линейных однородных уравнений называется её Фундаментальной системой решений.
Так как при изоморфизме базис пространства Аn–r соответствует базису пространства L , То для того. чтобы найти фундаментальную систему решений для системы (30), достаточно выбрать (N – r) линейно независимых наборов свободных неизвестных и для каждого из них найти решение данной системы.
Следствие. Если А1, а2, …, аN–r фундаментальная система решений системы линейных однородных уравнений (30) и С1, С2, … , СN–r – произвольные элементы поля Р, то С1А1 + С2А2 + … + СN–r АN–r – общее решение этой системы.
Пространство решений системы линейных однородных уравнений

Пространство решений системы линейных однородных уравнений
Пусть дана система (30) линейных однородных уравнений с коэффициентами из поля Р.
 (30)
(30)
Так как столбец свободных членов в матрице А1 этой системы состоит только из нулей, то rang A = rang A1, т. е. система линейных однородных уравнений всегда совместна. В частности она всегда имеет нулевое решение. Рассмотрим множество всех возможных решений системы (30).
Пусть a =(a1, a2, … , an) и b =(b1, b2, … , bn) – любые два из них. Их можно рассматривать, как векторы в арифметическом n-мерном пространстве над полем Р. Пусть l – любой элемент поля Р. Тогда a +b = (a1 + b1, a2 + b2, … , an + bn ), l×a = (la1, la2, … , lan). Подставим компоненты этих векторов в произвольное s-е уравнение системы (30). Получим 
 Итак, если a и b – любые два решения системы (30) и l – любой элемент поля Р, то a +b и l×a тоже являются решением этой системы. Но тогда из теоремы 14 следует
Итак, если a и b – любые два решения системы (30) и l – любой элемент поля Р, то a +b и l×a тоже являются решением этой системы. Но тогда из теоремы 14 следует
Теорема 27. Множество решений системы линейных однородных уравнений с n переменными есть линейное подпространство арифметического пространства Аn .
Теорема 28. Размерность пространства решений системы линейных однородных уравнений равна n – r, где n – число неизвестных, r – ранг матрицы системы.
Доказательство. Пусть L – пространство решений системы (30). Тогда L Ì Аn . Пусть a = (a1, a2, … ar, ar+1, … , an) – произвольное решение системы. Пусть (ar+1, … , an) – набор свободных неизвестных, соответствующий этому решению. Множество всех возможных наборов свободных неизвестных есть арифметическое (n – r)-мерное пространство Аn–r . Зададим отображение j: L ® Аn–r по правилу
Покажем, что j – изоморфизм (определение 24). Для этого нужно проверить три условия.
1. Покажем, что j – взаимнооднозначное отображение. Решению a = (a1, a2, … ar, ar+1, … , an) соответствует только один набор (ar+1, … , an), следовательно, j – однозначное отображение. Обратно, если задать элемент (ar+1, … , an) из Аn–r , то по теореме Крамера найдётся только один набор (a1, a2, … ar ) искомых неизвестных, т. е. каждый элемент j(a) из Аn–r соответствует единственному элементу из L .
Итак, пространство решений системы линейных однородных уравнений изоморфно арифметическому (n – r)-мерному пространству. Следовательно, размерность L равна (n – r).
Определение 29. Базис пространства решений системы линейных однородных уравнений называется её фундаментальной системой решений.
Так как при изоморфизме базис пространства Аn–r соответствует базису пространства L, то для того. чтобы найти фундаментальную систему решений для системы (30), достаточно выбрать (n – r) линейно независимых наборов свободных неизвестных и для каждого из них найти решение данной системы.
Следствие. Если а1, а2, …, аn–r фундаментальная система решений системы линейных однородных уравнений (30) и С1, С2, … , Сn–r – произвольные элементы поля Р, то С1а1 + С2а2 + … + Сn–r аn–r – общее решение этой системы.
Связь решений однородной и неоднородной систем линейных уравнений
Пусть  (25) произвольная система линейных неоднородных уравнений с коэффициентами из поля Р. Если в этой системе все свободные члены заменить нулями, то полученная система линейных однородных уравнений называется соответствующей однородной системой (это система (30)). Решения систем (25) и (30) удовлетворяют следующим свойствам:
(25) произвольная система линейных неоднородных уравнений с коэффициентами из поля Р. Если в этой системе все свободные члены заменить нулями, то полученная система линейных однородных уравнений называется соответствующей однородной системой (это система (30)). Решения систем (25) и (30) удовлетворяют следующим свойствам:
(30)
10. Сумма решений данной неоднородной и соответствующей однородной системы линейных уравнений есть решение данной неоднородной системы. Пусть а – частное решение системы (25) и с – частное решение системы (30). Рассмотрим вектор (а + с).
20. Разность двух решений неоднородной системы линейных уравнений есть решение соответствующей однородной системы.
30. Если а – фиксированное частное решение системы (25), а с пробегает все решения системы (30), то (а + с) пробегает все решения системы (25).
Согласно 10, при любом с вектор (а + с) будет решением системы (25). Если d – любое решение системы (25), то, согласно 20, разность (d – а) будет решением системы (30). Обозначив (d – а) = с, получим d = (а + с).
Теорема 29. Если а – частное решение линейной неоднородной системы уравнений и а1, а2, …, аn–r – фундаментальная система решений соответствующей однородной системы уравнений, то общее решение данной неоднородной системы имеет вид
(Иными словами, общее решение системы линейных неоднородных уравнений равно сумме частного решения этой системы и общего решения соответствующей однородной системы.)
Доказательство является следствием предыдущих свойств.
Задание подпространств конечномерного линейного пространства с помощью систем линейных уравнений
Пусть дано n-мерное линейное пространство L и пусть в нём зафиксирован базис е = (е1, е2, … , еn ). Пусть М – линейное подпространство в L .
Определение 30. Будем говорить, что система линейных уравнений задаёт подпространство М, если этой системе удовлетворяют координаты всех векторов из М и не удовлетворяют координаты никаких других векторов.
Из свойств решений однородной системы линейных уравнений следует, что любая однородная линейная система уравнений ранга r с n переменными задаёт в любом n-мерном пространстве Ln (если в нём зафиксирован базис) (n–r )-мерное линейное подпространство.
Справедливо и обратное утверждение. А именно, имеет место следующая теорема.
Теорема 30. Если в линейном n-мерном пространстве Ln зафиксирован базис, то любое его к-мерное линейное подпространство можно задать системой линейных однородных уравнений с n неизвестными ранга (n – к).
Доказательство. Пусть в Ln зафиксирован базис е = (е1, е2, … , еn ). Пусть Lк – линейное к-мерное подпространство в Ln . Выберем в Lк любой базис а = (а1, а2, … , ак). Пусть  В матричной форме а = е × А, где А =
В матричной форме а = е × А, где А =  .
.
Так как а – базис, то ранг матрицы А равен к.

Получили параметрические уравнения, определяющие Lк .
После исключения параметров получится система (n – к) линейных однородных уравнений. Векторы а1, а2, … , ак являются её линейно независимыми решениями. Все остальные решения являются их линейными комбинациями.
Следовательно, система векторов (а1, а2, … , ак) будет фундаментальной системой решений полученной системы уравнений и поэтому ранг этой системы уравнений равен (n – к).
Пример. В пространстве L5 зафиксирован базис е = (е1, е2, е3, е4 , е5 ). Найти систему линейных однородных уравнений, задающих L3 = , если а1 = (1, –2, 2, 0, 1), а2 = (0, 4, 7, 0, 1), а3 = (–2, 3, –1, 0, 0).
Решение. Найдём ранг системы векторов (а1, а2, а3 ). Для этого достаточно найти ранг матрицы  . Минор
. Минор  . Окаймляющий минор
. Окаймляющий минор  ¹ 0, следовательно, ранг матрицы равен 3, т. е. векторы а1, а2, а3 линейно независимы и подпространство L3 – трёхмерное. Согласно доказанной теоремы, оно может быть задано системой линейных однородных уравнений ранга 2.
¹ 0, следовательно, ранг матрицы равен 3, т. е. векторы а1, а2, а3 линейно независимы и подпространство L3 – трёхмерное. Согласно доказанной теоремы, оно может быть задано системой линейных однородных уравнений ранга 2.
d Î L3 Û d = с1а1 + с2а2 + с3а3 . Отсюда d Î L3 Û х1 = с1 – 2с3 , х2 = –2с1 + 4с2 + 3с3 , х3 = 2с1 + 7с2 – с3 , х4 = 0, х5 = с1 + с2. Если из первого второго и пятого уравнений выразить с1, с2 и с3 и подставить их в третье и четвёртое уравнения, то получим следующую систему

Замечание. Очевидно, система, задающая данное подпространство, определяется не единственным образом. К найденным уравнениям можно добавлять новые уравнения, являющиеся их линейными комбинациями.
Однородные системы линейных алгебраических уравнений. Фундаментальная система решений. Первая часть.
Однородные системы линейных алгебраических уравнений. Нулевое (тривиальное) решение.
Для начала стоит вспомнить, что такое однородные системы линейных алгебраических уравнений. В теме «Система линейных алгебраических уравнений. Основные термины. Матричная форма записи» вопрос классификации систем осуществлялся подробно, здесь же лишь вкратце напомню основные термины. Итак, система линейных алгебраических уравнений (СЛАУ) называется однородной, если все свободные члены этой системы равны нулю. Например, система $left < begin& 2x_1-3x_2-x_3-x_4=0;\ & -4x_1+5x_2+3x_4=0. end right.$ является однородной, так как все свободные члены этой системы (т.е. числа, стоящие в правых частях равенств) – нули.
Любая однородная СЛАУ имеет хотя бы одно решение – нулевое (его ещё называют тривиальное), в котором все переменные равны нулю. Подставим, например, $x_1=0$, $x_2=0$, $x_3=0$ и $x_4=0$ в записанную выше систему. Получим два верных равенства:
Однако следствие из теоремы Кронекера-Капелли однозначно указывает на то, что если СЛАУ имеет решение, то есть только два варианта. Либо это решение единственно (и тогда СЛАУ называют определённой), либо этих решений бесконечно много (такую СЛАУ именуют неопределённой). Возникает первый вопрос: как выяснить, сколько решений имеет заданная нам однородная СЛАУ? Одно (нулевое) или бесконечность?
Та однородная СЛАУ, которая рассмотрена выше, имеет не только нулевое решение. Подставим, например, $x_1=1$, $x_2=-1$, $x_3=2$ и $x_4=3$:
Мы получили два верных равенства, поэтому $x_1=1$, $x_2=-1$, $x_3=2$, $x_4=3$ – тоже является решением данной СЛАУ. Отсюда, кстати, следует вывод: так как наша СЛАУ имеет более чем одно решение, то эта СЛАУ является неопределенной, т.е. она имеет бесконечное количество решений.
Кстати сказать, чтобы не писать каждый раз выражения вроде «$x_1=1$, $x_2=-1$, $x_3=2$, $x_4=3$», пишут все значения переменных в матрицу-столбец: $left(begin 1 \ -1 \ 2 \ 3 end right)$. Эту матрицу тоже называют решением СЛАУ.
Теперь можно вернуться к вопросу о количестве решений однородной СЛАУ. Согласно следствию из теоремы Кронекера-Капелли, если $r=n$ ($n$ – количество переменных), то СЛАУ имеет единственное решение. Если же $r < n$, то СЛАУ имеет бесконечное количество решений.
Случай $r=n$ не интересен. Для однородных СЛАУ он означает, что система имеет только нулевое решение. А вот случай $r < n$ представляет особый интерес.
Этот случай уже был рассмотрен в теме «Базисные и свободные переменные. Общее и базисное решения СЛАУ». По сути, однородные СЛАУ – это всего лишь частный случай системы линейных уравнений, поэтому вся терминология (базисные, свободные переменные и т.д.) остаётся в силе.
Что такое базисные и свободные переменные? показатьскрыть
Прежде чем дать определение этим терминам, стоит вспомнить, что означает фраза «ранг матрицы равен $r$». Она означает, что есть хотя бы один минор $r$-го порядка, который не равен нулю. Напомню, что такой минор называется базисным. Базисных миноров может быть несколько. При этом все миноры, порядок которых выше $r$, равны нулю или не существуют. Теперь можно дать следующее определение:
Выбрать $r$ базисных переменных в общем случае можно различными способами. В примерах я покажу наиболее часто используемый способ выбора.
Фундаментальная система решений однородной СЛАУ.
С однородными СЛАУ связано дополнительное понятие – фундаментальная система решений. Дело в том, что если ранг матрицы системы однородной СЛАУ равен $r$, то такая СЛАУ имеет $n-r$ линейно независимых решений: $varphi_1$, $varphi_2$. $varphi_$.
Часто вместо словосочетания «фундаментальная система решений» используют аббревиатуру «ФСР». Если решения $varphi_1$, $varphi_2$. $varphi_$ образуют ФСР, и $X$ – матрица переменных данной СЛАУ, то общее решение СЛАУ можно представить в таком виде:
$$ X=C_1cdot varphi_1+C_2cdot varphi_2+ldots+C_cdot varphi_, $$
где $C_1$, $C_2$. $C_$ – произвольные постоянные.
Что значит «линейно независимые решения»? показатьскрыть
В данной ситуации под решением понимается матрица-столбец, в которой перечислены значения неизвестных.
Решения $varphi_1$, $varphi_2$, $ldots$, $varphi_n$ называются линейно зависимыми, если существуют такие константы $alpha_1,;alpha_2,;alpha_3,ldots,alpha_n$, что выполняется следующее равенство:
$$ alpha_1cdot varphi_1+alpha_2cdot varphi_2+ldots+alpha_ncdot varphi_n=O $$
при условии, что среди коэффициентов $alpha_i$ есть хотя бы один, не равный нулю.
Если же указанное выше равенство возможно лишь при условии $alpha_1=alpha_2=ldots=alpha_n=0$, то система решений называется линейно независимой.
Буква «$O$» в данном определении обозначает нулевую матрицу. Проще всего пояснить это определение на конкретном примере. Давайте рассмотрим ту СЛАУ, о которой шла речь в начале темы. Мы уже проверили, что $varphi_1=left(begin 1 \-1 \2 \3 endright)$ – решение данной СЛАУ. Точно так же можно показать, что $varphi_2=left(begin 16 \ 11 \ -4 \ 3 endright)$, $varphi_3=left(begin -5 \ -4 \ 2 \ 0 endright)$, $varphi_4=left(begin 7 \ 5 \ -2 \ 1endright)$ – решения данной системы.
Примем $alpha_1=-1$, $alpha_2=0$, $alpha_3=4$, $alpha_4=3$. Выясним, чему же равно выражение $alpha_1cdot varphi_1+alpha_2cdot varphi_2+alpha_3cdot varphi_3+alpha_4cdot varphi_4$:
$$ alpha_1cdot varphi_1+alpha_2cdot varphi_2+alpha_3cdot varphi_3+alpha_4cdot varphi_4= -1cdot left(begin 1 \-1 \2 \3 endright)+ 0cdot left(begin 16 \ 11 \ -4 \ 3 endright)+ 4cdot left(begin -5 \ -4 \ 2 \ 0 endright)+ 3cdot left(begin 7 \ 5 \ -2 \ 1endright)=\ =left(begin -1+0-20+21\ 1+0-16+15 \ -2+0+8-6 \ -3+0+0+3endright)= left(begin 0\ 0\ 0\0endright). $$
Итак, существуют такие значения констант $alpha_1$, $alpha_2$, $alpha_3$, $alpha_4$, не все одновременно равные нулю, что выполняется равенство $alpha_1cdot varphi_1+alpha_2cdot varphi_2+alpha_3cdot varphi_3+alpha_4cdot varphi_4=O$. Вывод: совокупность решений $varphi_1$, $varphi_2$, $varphi_3$, $varphi_4$ – линейно зависима.
Для сравнения: равенство $alpha_1cdot varphi_1+alpha_2cdot varphi_2=O$ возможно лишь при условии $alpha_1=alpha_2=0$ (я не буду это доказывать, поверьте на слово  ). Следовательно, система $varphi_1$, $varphi_2$ является линейно независимой.
). Следовательно, система $varphi_1$, $varphi_2$ является линейно независимой.
Если система является неопределённой, указать фундаментальную систему решений.
Итак, мы имеем однородную СЛАУ, у которой 3 уравнения и 4 переменных: $x_1$, $x_2$, $x_3$, $x_4$. Так как количество переменных больше количества уравнений, то такая однородная система не может иметь единственное решение (чуть позже мы строго докажем это предложение на основе теоремы Кронекера-Капелли). Найдём решения СЛАУ, используя метод Гаусса:
$$ left( begin 3 & -6 & 9 & 13 & 0 \ -1 & 2 & 1 & 1 & 0 \ 1 & -2 & 2 & 3 & 0 end right) rightarrow left|begin & text<поменяем местами первую и третью>\ & text<строки, чтобы первым элементом>\ & text <первой строки стала единица.>endright| rightarrow \ rightarrowleft( begin 1 & -2 & 2 & 3 & 0\ -1 & 2 & 1 & 1 & 0 \ 3 & -6 & 9 & 13 & 0 end right) begin phantom <0>\ II+I\ III-3cdot Iend rightarrow left( begin 1 & -2 & 2 & 3 & 0\ 0 & 0 & 3 & 4 & 0 \ 0 & 0 & 3 & 4 & 0 endright) begin phantom <0>\ phantom<0>\ III-IIend rightarrow \ rightarrowleft( begin 1 & -2 & 2 & 3 & 0\ 0 & 0 & 3 & 4 & 0 \ 0 & 0 & 0 & 0 & 0 endright). $$
Мы завершили прямой ход метода Гаусса, приведя расширенную матрицу системы к ступенчатому виду. Слева от черты расположены элементы преобразованной матрицы системы, которую мы также привели к ступенчатому виду. Напомню, что если некая матрица приведена к ступенчатому виду, то её ранг равен количеству ненулевых строк.
И матрица системы, и расширенная матрица системы после эквивалентных преобразований приведены к ступенчатому виду; они содержат по две ненулевых строки. Вывод: $rang A=rangwidetilde = 2$.
Итак, заданная СЛАУ содержит 4 переменных (обозначим их количество как $n$, т.е. $n=4$). Кроме того, ранги матрицы системы и расширенной матрицы системы равны между собой и равны числу $r=2$. Так как $r < n$, то согласно следствию из теоремы Кронекера-Капелли СЛАУ является неопределённой (имеет бесконечное количество решений).
Найдём эти решения. Для начала выберем базисные переменные. Их количество должно равняться $r$, т.е. в нашем случае имеем две базисные переменные. Какие именно переменные (ведь у нас их 4 штуки) принять в качестве базисных? Обычно в качестве базисных переменных берут те переменные, которые расположены на первых местах в ненулевых строках преобразованной матрицы системы, т.е. на «ступеньках». Что это за «ступеньки» показано на рисунке:
На «ступеньках» стоят числа из столбцов №1 и №3. Первый столбец соответствует переменной $x_1$, а третий столбец соответствует переменной $x_3$. Именно переменные $x_1$ и $x_3$ примем в качестве базисных.
В принципе, если вас интересует именно методика решения таких систем, то можно пропускать нижеследующее примечание и читать далее. Если вы хотите выяснить, почему можно в качестве базисных взять именно эти переменные, и нельзя ли выбрать иные – прошу раскрыть примечание.
Почему можно принять переменные $x_1$ и $x_3$ в качестве базисных? Для ответа на этот вопрос давайте вспомним, что ранг матрицы системы равен числу $r=2$. Это говорит о том, что все миноры данной матрицы, порядок которых выше 2, либо равны нулю, либо не существуют. Ненулевые миноры есть только среди миноров второго порядка. Выберем какой-либо ненулевой минор второго порядка. Мы можем выбирать его как в исходной матрице системы $A$, т.е. в матрице $left( begin 3 & -6 & 9 & 13 \ -1 & 2 & 1 & 1 \ 1 & -2 & 2 & 3 end right)$, так и в преобразованной матрице системы, т.е. в $left( begin 1 & -2 & 2 & 3 \ 0 & 0 & 3 & 4 \ 0 & 0 & 0 & 0 endright)$. Так как в преобразованной матрице системы побольше нулей, то будем работать именно с нею.
Итак, давайте выберем минор второго порядка, элементы которого находятся на пересечении строк №1 и №2, и столбцов №1 и №2:
$$ M_<2>^<(1)>=left| begin 1 & -2 \ 0 & 0 endright|=1cdot 0-(-2)cdot 0=0. $$
Вывод: выбранный нами минор второго порядка не является базисным, ибо он равен нулю. Так как элементы этого минора взяты из столбца №1 (он соответствует переменной $x_1$) и столбца №2 (он соответствует переменной $x_2$), то пара переменных $x_1$ и $x_2$ не могут быть базисными переменными.
Осуществим вторую попытку, взяв минор второго порядка, элементы которого лежат на пересечении строк №1, №2 и столбцов №2 и №4:
$$ M_<2>^<(2)>=left| begin 2 & 3\ 3 & 4 endright|=2cdot 4-3cdot 3=-1. $$
Вывод: выбранный нами минор второго порядка является базисным, ибо он не равен нулю. Так как элементы этого минора взяты из столбца №2 (он соответствует переменной $x_2$) и столбца №4 (он соответствует переменной $x_4$), то пару переменных $x_2$ и $x_4$ можно принять в качестве базисных.
Сделаем и третью попытку, найдя значение минора, элементы которого расположены на пересечении строк №1, №2 и столбцов №1 и №3:
Вывод: выбранный нами минор второго порядка является базисным, ибо он не равен нулю. Так как элементы этого минора взяты из столбца №1 (он соответствует переменной $x_1$) и столбца №3 (он соответствует переменной $x_3$), то пару переменных $x_1$ и $x_3$ можно принять в качестве базисных.
Как видите, выбор базисных переменных не является однозначным. На самом деле количество вариантов выбора не превышает количество размещений из $n$ элементов по $r$, т.е. не больше чем $C_^$.
В рассматриваемом примере в качестве баисных были приняты переменные $x_1$ и $x_3$ – сугубо из соображений удобства дальнейшего решения. В чём это удобство состоит, будет видно чуток позже.
Базисные переменные выбраны: это $x_1$ и $x_3$. Количество свободных переменных, как и количество решений в ФСР, равно $n-r=2$. Свободными переменными будут $x_2$ и $x_4$. Нам нужно выразить базисные переменные через свободные.
Я предпочитаю работать с системой в матричной форме записи. Для начала очистим полученную матрицу $left( begin 1 & -2 & 2 & 3 & 0\ 0 & 0 & 3 & 4 & 0 \ 0 & 0 & 0 & 0 & 0 endright)$ от нулевой строки:
$$ left( begin 1 & -2 & 2 & 3 & 0\ 0 & 0 & 3 & 4 & 0 endright) $$
Свободным переменным, т.е. $x_2$ и $x_4$, соответствуют столбцы №2 и №4. Перенесём эти столбцы за черту. Знак всех элементов переносимых столбцов изменится на противоположный:
Почему меняются знаки? Что вообще значит это перенесение столбцов? показатьскрыть
Давайте обратимся к расширенной матрице системы, которая после преобразований имеет вид $left( begin 1 & -2 & 2 & 3 & 0\ 0 & 0 & 3 & 4 & 0 endright)$. Перейдём от матрицы к уравнениям. Первая строка соответствует уравнению $x_1-2x_2+2x_3+3x_4=0$, а вторая строка соответствует уравнению $3x_3+4x_4=0$. Теперь перенесём свободные переменные $x_2$ и $x_4$ в правые части уравнений. Естественно, что когда мы переносим выражение $4x_4$ в правую часть уравнения, то знак его изменится на противоположный, и в правой части появится $-4x_4$.
Если опять записать полученную систему в виде матрицы, то мы и получим матрицу с перенесёнными за черту столбцами.
А теперь продолжим решение обычным методом Гаусса. Наша цель: сделать матрицу до черты единичной. Для начала разделим вторую строку на 3, а потом продолжим преобразования обратного хода метода Гаусса:
$$ left( begin 1 & 2 & 2 & -3\ 0 & 3 & 0 & -4 endright) begin phantom <0>\ II:3 end rightarrow left( begin 1 & 2 & 2 & -3\ 0 & 1 & 0 & -4/3 endright) begin I-2cdot II \ phantom <0>end rightarrow \ rightarrow left(begin 1 & 0 & 2 & -1/3\ 0 & 1 & 0 & -4/3 endright). $$
Матрица до черты стала единичной, метод Гаусса завершён. Общее решение найдено, осталось лишь записать его. Вспоминая, что четвёртый столбец соответствует переменной $x_2$, а пятый столбец – переменной $x_4$, получим:
Нами найдено общее решение заданной однородной СЛАУ. Если есть желание, то полученное решение можно проверить. Например, подставляя $x_1=2x_2-frac<1><3>x_4$ и $x_3=-frac<4><3>x_4$ в левую часть первого уравнения, получим:
$$ 3x_1-6x_2+9x_3+13x_4=3cdot left(2x_2-frac<1><3>x_4right)-6x_2+9cdot left(-frac<4><3>x_4right)+13x_4=0. $$
Проверка первого уравнения увенчалась успехом; точно так же можно проверить второе и третье уравнения.
Теперь найдем фундаментальную систему решений. ФСР будет содержать $n-r=2$ решения. Для нахождения ФСР составим таблицу. В первой строке таблицы будут перечислены переменные: сначала базисные $x_1$, $x_3$, а затем свободные $x_2$ и $x_4$. Всего в таблице будут три строки. Так как у нас 2 свободные переменные, то под свободными переменными запишем единичную матрицу второго порядка, т.е. $left(begin 1 & 0 \0 & 1endright)$. Таблица будет выглядеть так:
Теперь будем заполнять свободные ячейки. Начнём со второй строки. Мы знаем, что $x_1=2x_2-frac<1><3>x_4$ и $x_3=-frac<4><3>x_4$. Если $x_2=1$, $x_4=0$, то:
Найденные значения $x_1=2$ и $x_3=0$ запишем в соответствующие пустые ячейки второй строки:
Заполним и третью строку. Если $x_2=0$, $x_4=1$, то:
Найденные значения $x_1=-frac<1><3>$ и $x_3=-frac<4><3>$ запишем в соответствующие пустые ячейки третьей строки. Таким образом таблица будет заполнена полностью:
Из второй и третьей строки таблицы мы и запишем ФСР. Матрица неизвестных для нашей системы такова: $X=left(begin x_1 \x_2 \x_3 \x_4 endright)$. В том же порядке, в котором в матрице $X$ перечислены переменные, записываем значения переменных из таблицы в две матрицы:
$$ varphi_1=left(begin 2 \1 \0 \0 endright);; varphi_2=left(begin -1/3 \0 \ -4/3 \1 endright). $$
Совокупность $varphi_1=left(begin 2 \1 \0 \0 endright)$, $varphi_2=left(begin -1/3 \0 \ -4/3 \1 endright)$ и есть ФСР данной системы. Общее решение можно записать теперь так: $X=C_1cdot varphi_1+C_2cdot varphi_2$. Или в развёрнутом виде:
$$ X=C_1cdotleft(begin 2 \1 \0 \0 endright)+C_2cdotleft(begin -1/3 \0 \ -4/3 \1 endright), $$
где $C_1$ и $C_2$ – произвольные постоянные.
Ответ: Общее решение: $left <begin& x_1=2x_2-frac<1><3>x_4;\ & x_2in R;\ & x_3=-frac<4><3>x_4;\ & x_4 in R. endright.$. Или так: $X=C_1cdotleft(begin 2 \1 \0 \0 endright)+C_2cdotleft(begin -1/3 \0 \ -4/3 \1 endright)$, где $C_1$ и $C_2$ – произвольные константы. Фундаментальная система решений: $varphi_1=left(begin 2 \1 \0 \0 endright)$, $varphi_2=left(begin -1/3 \0 \ -4/3 \1 endright)$.
Записать ФСР однородной СЛАУ
зная общее решение. Записать общее решение с помощью ФСР.
Общее решение уже было получено в теме «метод Крамера» (пример №4). Это решение таково:
Опираясь на предыдущий пример №1, попробуйте составить ФСР самостоятельно, а потом сверить с ответом.
Ранг матрицы системы $r=3$ (поэтому у нас три базисных переменных), количество переменных $n=5$. Количество свободных переменных и количество решений ФСР равно $n-r=2$.
Так же, как и в предыдущем примере, составим ФСР. При составлении учтём, что $x_1$, $x_2$, $x_3$ – базисные переменные, а $x_4$, $x_5$ – свободные переменные.
Совокупность $varphi_1=left(begin -17/19 \-15/19 \20/19 \1\0 endright)$, $varphi_2=left(begin 144/19 \ 41/19 \ -4/19\0\1 endright)$ и есть ФСР данной системы. Общее решение можно записать теперь так: $X=C_1cdot varphi_1+C_2cdot varphi_2$. Или в развёрнутом виде:
$$ X=C_1cdotleft(begin -17/19 \-15/19 \20/19 \1\0 endright)+C_2cdotleft(begin 144/19 \ 41/19 \ -4/19\0\1 endright), $$
где $C_1$ и $C_2$ – произвольные постоянные.
Ответ: Фундаментальная система решений: $varphi_1=left(begin -17/19 \-15/19 \20/19 \1\0 endright)$, $varphi_2=left(begin 144/19 \ 41/19 \ -4/19\0\1 endright)$. Общее решение: $X=C_1cdotleft(begin -17/19 \-15/19 \20/19 \1\0 endright)+C_2cdotleft(begin 144/19 \ 41/19 \ -4/19\0\1 endright)$, где $C_1$ и $C_2$ – произвольные константы.
Продолжение этой темы рассмотрим во второй части, где разберём ещё один пример с нахождением общего решения и ФСР.
http://pandia.ru/text/78/155/21977.php
http://math1.ru/education/sys_lin_eq/fsr1.html
Пусть дана система (30) линейных однородных уравнений с коэффициентами из поля Р.
|
|
Так как столбец свободных членов в матрице А1 этой системы состоит только из нулей, то rang A = rang A1, т. е. система линейных однородных уравнений всегда совместна. В частности она всегда имеет нулевое решение. Рассмотрим множество всех возможных решений системы (30). |
Пусть A =(A1, A2, … , An) и B =(B1, B2, … , Bn) – Любые два из них. Их можно рассматривать, как векторы в арифметическом n-мерном пространстве над полем Р. Пусть L – любой элемент поля Р. Тогда A +B = (A1 + B1, A2 + B2, … , An + Bn ), L×A = (LA1, LA2, … , LAn). Подставим компоненты этих векторов в произвольное S-е уравнение системы (30). Получим ![]()
![]() Итак, если A и B – Любые два решения системы (30) и L – любой элемент поля Р, то A +B И L×A тоже являются решением этой системы. Но тогда из теоремы 14 следует
Итак, если A и B – Любые два решения системы (30) и L – любой элемент поля Р, то A +B И L×A тоже являются решением этой системы. Но тогда из теоремы 14 следует
Теорема 27. Множество решений системы линейных однородных уравнений с N Переменными есть линейное подпространство арифметического пространства Аn .
Теорема 28. Размерность пространства решений системы линейных однородных уравнений равна N – r, Где N – Число неизвестных, r – ранг матрицы системы.
Доказательство. Пусть L – пространство решений системы (30). Тогда L Ì Аn . Пусть A = (A1, A2, … Ar, Ar+1, … , An) – произвольное решение системы. Пусть (Ar+1, … , An) – набор свободных неизвестных, соответствующий этому решению. Множество всех возможных наборов свободных неизвестных есть арифметическое (N – r)-мерное пространство Аn–r . Зададим отображение J: L ® Аn–r по правилу
A = (A1, A2, … Ar, Ar+1, … , An) ® J(A) = (Ar+1, … , An).
Покажем, что J – изоморфизм (определение 24). Для этого нужно проверить три условия.
1. Покажем, что J – взаимнооднозначное отображение. Решению A = (A1, A2, … Ar, Ar+1, … , An) соответствует только один набор (Ar+1, … , An), следовательно, J – Однозначное отображение. Обратно, если задать элемент (Ar+1, … , An) из Аn–r , то по теореме Крамера найдётся только один набор (A1, A2, … Ar ) искомых неизвестных, т. е. каждый элемент J(A) из Аn–r соответствует единственному элементу из L .
2. J(LA) = (LAr+1, … , LAn ) = L×(Ar+1, … , An ) = L×J(А).
3. J(А + В) = (AR+1 + BR+1, … ,AN + BN ) = (Ar+1, … , An) + (BR+1, … , BN ) = J(А) + J(В).
Итак, пространство решений системы линейных однородных уравнений изоморфно арифметическому (N – r)-мерному пространству. Следовательно, размерность L равна (N – r).
Определение 29. Базис пространства решений системы линейных однородных уравнений называется её Фундаментальной системой решений.
Так как при изоморфизме базис пространства Аn–r соответствует базису пространства L , То для того. чтобы найти фундаментальную систему решений для системы (30), достаточно выбрать (N – r) линейно независимых наборов свободных неизвестных и для каждого из них найти решение данной системы.
Следствие. Если А1, а2, …, аN–r фундаментальная система решений системы линейных однородных уравнений (30) и С1, С2, … , СN–r – произвольные элементы поля Р, то С1А1 + С2А2 + … + СN–r АN–r – общее решение этой системы.
| < Предыдущая | Следующая > |
|---|