Передаточная функция для заданных физических частот Решение
ШАГ 0: Сводка предварительного расчета
ШАГ 1. Преобразование входов в базовый блок
Выходное значение преобразования Лапласа: 15 —> Конверсия не требуется
Входное значение преобразования Лапласа: 10 —> Конверсия не требуется
ШАГ 2: Оцените формулу
ШАГ 3: Преобразуйте результат в единицу вывода
1.5 —> Конверсия не требуется
8 СТК-фильтр Калькуляторы
Передаточная функция для заданных физических частот формула
Функция передачи = Выходное значение преобразования Лапласа/Входное значение преобразования Лапласа
Tjw = Vos/Vis
Как найти преобразование Лапласа передаточной функции?
Заменим s на jω, чтобы определить передаточную функцию для физических частот. В единицах s импеданс индуктивности L равен sL, а сопротивление емкости C равно 1 / sC.
Время на прочтение
7 мин
Количество просмотров 14K
Продолжаем публикацию лекций по курсу «Управление в Технических Системах» автор — Олег Степанович Козлов на кафедре Э7 МГТУ им. Н.Э. Баумана.
Данные лекции готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется. В предыдущих сериях:
1. Введение в теорию автоматического управления.
2. Математическое описание систем автоматического управления 2.1 — 2.3, 2.3 — 2.8, 2.9 — 2.13.
3. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕГУЛИРОВАНИЯ.
3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ. 3.2. Типовые звенья систем автоматического управления регулирования. Классификация типовых звеньев. Простейшие типовые звенья. 3.3. Апериодическое звено 1–го порядка инерционное звено. На примере входной камеры ядерного реактора. 3.4. Апериодическое звено 2-го порядка. 3.5. Колебательное звено. 3.6. Инерционно-дифференцирующее звено. 3.7. Форсирующее звено. 3.8. Инерционно-интегрирующее звено (интегрирующее звено с замедлением). 3.9. Изодромное звено (изодром). 3.10 Минимально-фазовые и не минимально-фазовые звенья. 3.11 Математическая модель кинетики нейтронов в «точечном» реакторе «нулевой» мощности. 4 Структурные преобразования систем автоматического регулирования.
Будет как всегда позновательной увлекательно и жестко
5.1. Главная передаточная функция. Передаточные функции по возмущающему воздействию и для ошибки (рассогласования)
Используя структурные преобразования (см. раздел 4), структурную схему практически любой линейной или линеаризованной САР (САУ) можно привести к виду:

Где функции по времени:
![]() — управляющее воздействие;
— управляющее воздействие;
![]() – регулируемая величина (выходное воздействие);
– регулируемая величина (выходное воздействие);
![]() – возмущающее воздействие;
– возмущающее воздействие;
Или в изображениях:

Определение: Если единичная обратная связь охватывает все элементы (звенья) САР – она называется главной.
Определение: Если главная обратная связь отсутствует — САР считается разомкнутой.
Передаточная функция ![]() может быть любой сложности (т.е. содержать местные обратные связи, параллельные и последовательные цепи и т.д.).
может быть любой сложности (т.е. содержать местные обратные связи, параллельные и последовательные цепи и т.д.).
Возмущающих воздействий может быть несколько и приложены они могут быть в любом месте структурной схемы.
Передаточную функцию ![]() которую в Теории Управления называют передаточной функцией разомкнутой САР, будем представлять в следующем виде (для единообразия):
которую в Теории Управления называют передаточной функцией разомкнутой САР, будем представлять в следующем виде (для единообразия):

где ![]() – общий коэффициент усиления;
– общий коэффициент усиления; ![]() – полиномы по степеням переменной
– полиномы по степеням переменной ![]() , причем свободные члены в них равны 1 (единице).
, причем свободные члены в них равны 1 (единице).
Учитывая, что САР линейна или линеаризована, разделим на структурной схеме каналы прохождения управляющего и возмущающего воздействий. Выделим в отдельное звено (может быть и очень сложное) ту часть системы, через которую проходит возмущающее воздействие![]() обозначим ее через
обозначим ее через ![]() Структурная схема САР принимает вид:
Структурная схема САР принимает вид:

где: ![]()
В Теории Управления используют 3 основных передаточных функций замкнутой САР:
-
главная передаточная функция
 ;
; -
передаточная функция по возмущающему воздействию
 ;
; -
передаточная функция для ошибки (рассогласования)

Рассмотрим более подробно вышеупомянутые передаточные функции.
Главная передаточная функция
Главная передаточная функция -передаточная функция по управляющему воздействию математическое определение этой передаточной функции:

выведем формулу при условии если возмущеющие воздействие равно ![]() . «Обойдем» структурную схемв по контуру:
. «Обойдем» структурную схемв по контуру:
![Y(s)= E(s)cdot W(s)=left[ X(s)-Y(s)right]cdot W(s)Rightarrow\Y(s)=X(s)cdot W(s)-Y(s)cdot W (s) Rightarrow\Y(s)+Y(s)cdot W(s)=X(s)cdot W(s)Rightarrow\ frac{Y(s)}{X(s)}=frac{W(s)}{1+W(s)};](https://habrastorage.org/getpro/habr/upload_files/533/b53/27c/533b5327c62d984a9e78e213d2c38f23.svg)

Примечание. Формула (5.3) совпадает с формулой для передаточной функции цепи с местной единичной обратной связью (см. раздел 4 – «Структурные преобразования»).
Подставляя вместо ![]() ее выражение через полиномы
ее выражение через полиномы ![]() и
и ![]()

где: ![]()
Анализ выражения (5.4) показывает, что свойства главной передаточной функции замкнутой САР однозначно определяются свойствами разомкнутой САР, т.е. через полиномы ![]() и
и ![]() .
.
Передаточная функция замкнутой САР по внешнему возмущающему воздействию
Дадим математическое определение рассматриваемой передаточной функции если управляющие воздействи ![]() , а возмущеющие воздействие отличное от нуля
, а возмущеющие воздействие отличное от нуля ![]() . В этом случае (см. рисунок 5.1.2) получается:
. В этом случае (см. рисунок 5.1.2) получается:

Перрейдем к изображением и «обойдем» схему (см. рис. 5.1.2) по контуру
![Y(s)=Y_1(s)+Y_2(s) =E(s)cdot W(s)+F(s)cdot M(s)=\=-Y(s)cdot W(s)+F(s)cdot M(s) Rightarrow\Y(s)cdot[1+W(s)]=F(s)cdot M(s)Rightarrow frac{Y(s)}{F(s)}=frac{M(s)}{1+W(s)};](https://habrastorage.org/getpro/habr/upload_files/e60/312/292/e60312292fce91254fe8e221758baf77.svg)

Подставляя вместо ![]() ее выражение через полиномы
ее выражение через полиномы ![]() и
и ![]() получаем:
получаем:

где: ![]() — вид данного полинома зависит от места приложения возмущающего воздействия;
— вид данного полинома зависит от места приложения возмущающего воздействия;
Формулы 5.4 и 5.6 имеют общий занаменатель ![]()
Передаточная функция замкнутой САР для ошибки (рассогласования)
Дадим математическое определение рассматриваемой передаточной функции если управляющие воздействиt отлично от 0 ![]() , а возмущеющие воздействие равно 0
, а возмущеющие воздействие равно 0 ![]() . В этом случае для передаточной функции получается (см. рис. 5.1.2):
. В этом случае для передаточной функции получается (см. рис. 5.1.2):

Сделаем вывод соответствующих формул, выполнив «обход» по контуру схемы (см. рис. 5.1.2) ![]()

![]()
Учитывая формулу для главной передаточной функции  можно записать выражения для передаточной функции рассоглаосвания:
можно записать выражения для передаточной функции рассоглаосвания:
![]()
Подставляя вместо ![]() ее выражение через полиномы
ее выражение через полиномы ![]() и
и ![]() получаем:
получаем:

где: ![]()
Опять замечаем, что знаменатель передаточной функции ![]() равен полиному
равен полиному ![]() следовательно, характерным признаком передаточных функций замкнутой САР является общность знаменателей ! ! !
следовательно, характерным признаком передаточных функций замкнутой САР является общность знаменателей ! ! !
В Теории Управления выражение ![]() имеет «собственное» название: характеристический полином замкнутой САР.
имеет «собственное» название: характеристический полином замкнутой САР.
5.2 Уравнения динамики замкнутой САР
Как указывалось в подразделе 5.1, любую замкнутую САР можно привести к виду представленному на рисунке 5.2.1:

Выведены соотношения для 3-х основных передаточных функций замкнутой САР позволяют записать выражения для регулируемой величины в изображениях:

Подставляя значения ![]() и
и ![]() через полиномы
через полиномы  и
и ![]() разомкнутой САР получаем:
разомкнутой САР получаем:

подставим значения для характеристического полинома ![]() получим выражение для динамического уравнения замкнутой САР в изображениях:
получим выражение для динамического уравнения замкнутой САР в изображениях:
![]()
Переходя к оригиналам получаем символическую форму записи обыкновенного дифференциального уравнения замкнутой САР:
![]()
Решение диференциального уравнения состоит из двух частей:
![]()
где: ![]() — собственная часть, решение однородного дифференциального уравнения
— собственная часть, решение однородного дифференциального уравнения ![]() ;
;
![]() — вынужденная часть решения (частное решение), определяемая правой частью уравнения ( 5.2.3 ).
— вынужденная часть решения (частное решение), определяемая правой частью уравнения ( 5.2.3 ).
Решения однородного уравнения замкнутой САР:
![]()
записываем соответствующее характеристическое уравнение:
![]()
находим корни степенного уравнения ![]() если все корни уравнения разные:
если все корни уравнения разные:

Если есть совпадающие корни характеристического уравнения, то формула для ![]() изменится (см. Математическое описание систем автоматического управления).
изменится (см. Математическое описание систем автоматического управления).
Обычно ![]() находят по виду правой части уравнения (5.2.3) или, используя другие методы (например, метод вариаций постоянных).
находят по виду правой части уравнения (5.2.3) или, используя другие методы (например, метод вариаций постоянных).
Необходимо отметить, что порядок дифференциального уравнения (5.2.3) равен «n», т.е. такой же, как и у разомкнутой САР ![]()
![]()
если нет возмущающего воздействия, т.к. порядок дифференциального оператора L(p) обычно значительно выше, чем N(p).
По аналогии с выводом уравнения (5.2.3) можно получить уравнение динамики для рассогласования ![]() :
:
![]()
подставляя значения ![]() и
и ![]() (см. 5.6 и 5.9) получаем:
(см. 5.6 и 5.9) получаем:

![]()
Уравнение (5.2.5)- уравнение динамики замкнутой САР в ихображениях для рассогласования (ошибки) при наличии управляющего и возмущающего воздействий.
Особенностью данного уравнения (5.2.5) является то, что левая часть его практически совпадает с левой частью (5.2.2), в то время, как порядок правой части заметно выше , т.к. порядок многочленов D (s) и L (s) — одинаков, а порядок N(s) меньше L(s).
Это означает, что внешние воздействия ![]() и
и ![]() влияют на
влияют на ![]() более сильным образом.
более сильным образом.
Дифференциальное уравнение замкнутой САР для ошибки:
![]()
Способы решения уравнения ( 5.2.6 ) такие же, как и для уравнения ( 5.2.3 ) .
5.3. Частотные характеристики замкнутой САР.
Наибольший интерес при анализе замкнутых САР имеет АФЧХ замкнутой САР по управляющему воздействию:

где передаточная функция:

Учитывая, что ![]() — комплексное число, по аналогии имеем:
— комплексное число, по аналогии имеем:
![]()
Где ![]() — вещественная часть функции,
— вещественная часть функции, ![]() — мнимая часть функиции.
— мнимая часть функиции.

На этих рисунках представлен «примерный» вид зависимостей P (w)и Q(w) для «какой-то» замкнутой САР причем P(w) — четная функция, т.е. P(w) = P(-w); Q(w) — нечетная функция, т.е. Q(w) = — Q(-w).
Если известны частотные свойства разомкнутой САР, то можно определить частотные свойства замкнутой САР. Воспользуемся показательной формой для АФЧХ
![]()
Где ![]() — амплитуда (модуль),
— амплитуда (модуль), ![]() — сдвиг фазы (фаза). Подставляя это в (5.3.1), имеем получаем:
— сдвиг фазы (фаза). Подставляя это в (5.3.1), имеем получаем:



Учитывая, что ![]()
![frac{cos[varphi_з(omega)]}{A_з(omega)}-icdotfrac{sin[varphi_З(omega)]}{A_з(omega)}=1+frac{cos[varphi(omega)]}{A(omega)}-icdotfrac{sin[varphi(omega)]}{A(omega)} mathbf{(5.3.4)}](https://habrastorage.org/getpro/habr/upload_files/0ee/6c9/fff/0ee6c9fff38a2886fbd26e8539fe9f16.svg)
Приравнивая чисто вещественные и чисто мнимые части, имеем ![]()
![left { begin {align}frac{cos[varphi_з(omega)]}{A_з(omega)}&=1+frac{cos[varphi(omega)]}{A(omega)} (1)\ frac{sin[varphi_з(omega)]}{A_з(omega)}&=frac{sin[varphi(omega)]}{A(omega)} (2). end{align} right. mathbf{(5.3.5)}](https://habrastorage.org/getpro/habr/upload_files/479/403/736/479403736dd1cdc754d7d0c02286d684.svg)
Для нахождения амплитуды ![]() и сдвига фазы
и сдвига фазы ![]() замкнутой передаточной функции как функции от амплитуды
замкнутой передаточной функции как функции от амплитуды ![]() и сдвига фазы
и сдвига фазы ![]() разомкнутой системы. Разделив (2) на (1) получим:
разомкнутой системы. Разделив (2) на (1) получим:
![tg[varphi_з(omega)]=frac{sin[varphi(omega)]}{A(omega)+cos[varphi(omega)]} Rightarrow](https://habrastorage.org/getpro/habr/upload_files/eeb/871/1b5/eeb8711b54b25f3d889122eb05ef36e8.svg)
Сдвиг фазы замкнутой системы через характеристики разомкнутой системы:
![varphi_з(omega) = arctg left[ frac{sin[varphi(omega)]}{A(omega)+cos[varphi(omega)]}right] - picdot j mathbf{(5.3.6)}](https://habrastorage.org/getpro/habr/upload_files/ee9/55d/68b/ee955d68bb8b2bd1431df4a97288c76b.svg)
Для получения амплитуды замкнутоей системы возведем оба уравнения системы (5.3.5) в квадрат: ![]()
![left { begin {align}frac{cos^2[varphi_з(omega)]}{A^2_з(omega)}&=1+frac{cos^2[varphi(omega)]}{A^2(omega)}+2 cdotfrac{cos[varphi(omega)]}{A(omega)} ;\ frac{sin^2[varphi_з(omega)]}{A_з^2(omega)}&=frac{sin^2[varphi(omega)]}{A^2(omega)} . end{align} right.](https://habrastorage.org/getpro/habr/upload_files/219/ee7/ae7/219ee7ae7f5dc5a482f636ec454ac335.svg)
складываем эти два уравнения:
![frac{1}{A^2_з(omega)}left[underbrace{cos^2varphi_з(omega)+sin^2varphi_з(omega)}_1right]=1+frac{1}{A^2(omega)}left[underbrace{cos^2varphi(omega)+sin^2varphi(omega)}_1right]+dots\dots+2frac{cos[varphi(omega]}{A(omega)}](https://habrastorage.org/getpro/habr/upload_files/351/b0a/248/351b0a248c04b78364675da88b60ac84.svg)
![frac{1}{A^2_з(omega)}=frac{A^2(omega)+2cdot Acdot cos[varphi(omega)]+1}{A^2(omega)}Rightarrow](https://habrastorage.org/getpro/habr/upload_files/664/0b8/d74/6640b8d748b49f8ad9d25d74e59f8bd2.svg)
![A_з(omega)=frac{A(omega)}{sqrt{A^2(omega)+2cdot A(omega)cdot cos[varphi(omega)]+1}} mathbf{(5.3.7)}](https://habrastorage.org/getpro/habr/upload_files/5a5/e45/83f/5a5e4583f0dbbab9d4b202518d7b3a81.svg)
Аналогичным образом можно выразить, например, P(w) и Q(w) — характеристики замкнутой САР через u(w) и u(w) — характеристики разомкнутой САР.
Пример
В качестве примера на рисунке 5.4.1 приведена модель помещения, в котором с помощью интегрирующего звена обеспечивается подвод тепла для поддержания температуры. Температура задается в виде ступенчатой функции. В качестве внешнего воздействия используется внешняя температура.

Передаточные функции построены средтвами автоматического анализа. Видно, что знаменатель главной передаточной функции и знаменатель передаточной функции по возмущающиму воздействию одинаковы.

График справа показывает расхождение результаты модели (зеленая линия) и передаточных функций (синит линя) в начале расчета, но потом функции сходятся. Расхождение объясняются разными начальными условиями по производным. Слева тот же самый график, но в это случае начальное состояние определено с помощю загрузки стационарного состояния, полученного предварительным моделированием. В этом случае совпадение модели и передаточных функций полное.
Ссылку на модель примера можено взять здесь…
Здравствуйте на этой странице я собрала теорию и практику с примерами решения задач по предмету теория автоматического управления с решением по каждой теме, чтобы вы смогли освежить знания!
Если что-то непонятно — вы всегда можете написать мне в WhatsApp и я вам помогу!

Теория автоматического управления
Теория автоматического управления (ТАУ), — научная дисциплина, предметом изучения которой являются информационные процессы, протекающие в системах управления техническими и технологическими объектами. ТАУ выявляет общие закономерности функционирования, присущие автоматическим системам различной физической природы, и на основе этих закономерностей разрабатывает принципы построения высококачественных систем управления.
Одномерные линейные непрерывные системы
Как правило, по структурной схеме при известных функциях передачи отдельных звеньев требуется найти эквивалентную передаточную функцию (ПФ) некоторого объединения звеньев (объекта, регулятора), либо всей системы в целом. Для этого используют правила преобразования последовательного, параллельного и встречно-параллельного (с обратной связью) соединений.
Эквивалентная передаточная функция последовательно соединенных звеньев равна произведению передаточных функций этих звеньев. Считают, что перестановка последовательно включенных по пути сигнала звеньев не влияет на результат, т. е.

Эквивалентная передаточная функция параллельно соединенных звеньев равна сумме передаточных функций этих звеньев (с учетом знака входа сумматора на пути сигнала).
Путь от входа к выходу системы называется прямой связью, от выхода ко входу — обратной связью. Если сигнал на пути меняет знак (обычно на инвертирующем входе сумматора), обратная связь называется отрицательной (ООС), если не меняет знак — положительной (ПОС). Замкнутый путь называется контуром, например, замкнутый контур обратной связи (ЗКОС). Эквивалентная передаточная функция соединения с обратной связью равна дроби, в числителе которой записана ПФ звена на прямом пути, а в знаменателе — единица минус произведение ПФ звеньев по замкнутому контуру обратной связи. Величина  . называется определителем ЗКОС.
. называется определителем ЗКОС.
Особенности этого вида соединения звеньев:
- если в системе есть хоть одна обратная связь, передаточная функция системы будет всегда представлять собой дробь;
- знак перед произведением ПФ звеньев в знаменателе (в определителе ЗКОС) обычно противоположен знаку обратной связи.
Для систем с перекрещивающимися (мостиковыми) связями применяют правило переноса: в переносимую ветвь вводят фиктивное звено с передаточной функцией, равной ПФ потерянного, либо обратной ПФ появившегося при переносе элемента.
По Мейсону структурная схема может быть описана целиком, без деления на звенья. Передаточная функция многоконтурной системы образует дробь, числитель которой равен сумме произведений передаточных функций прямых путей на совокупные определители ЗКОС, не касающихся этих путей, а знаменатель — единица минус сумма произведений определителей несоприкасающихся ЗКОС и передаточных функций общих ЗКОС. Следует внимательно относиться к ветвям, которые заходят извне в контур ОС, т.к. они могут образовывать неявные прямые пути по цепям обратных связей.
Пример №1
Определить передаточную функцию схемы (рисунок 1.1,а).

Решение:
Видно, что без преобразований нельзя начинать сворачивать схему, в частности, нельзя объединить звенья  и
и  , как последовательно включенные, из-за связи в точке
, как последовательно включенные, из-за связи в точке  . Перенесем ветвь из узла в узел
. Перенесем ветвь из узла в узел  (рисунок 1.1,6).
(рисунок 1.1,6).
В исходной схеме на пути от точки к входному сумматору не было звеньев, преобразующих сигнал, а в новой схеме на пути между теми же точками появляется звено с передаточной функцией . Следовательно, в цепь переносимого воздействия нужно ввести фиктивное звено с обратной передаточной функцией, т. е.  или
или  .
.
После переноса начнем свертывание схемы, заменяя каждый раз несколько звеньев одним эквивалентным на основе правил 1-3 и увеличивая границы преобразуемого участка. Промежуточные (вспомогательные) ПФ обычно индексируют римскими цифрами, их используют временно и обязательно заменяют в итоге на ПФ с реально существующими индексами.
Конечный результат всегда представляется в виде простой рациональной дроби и выражается только через исходные передаточные функции. Сигнал не может пройти через одну и ту же точку дважды, поэтому появление в выражении кратных величин вида  или
или  и т. п. является признаком допущенной при преобразованиях ошибки.
и т. п. является признаком допущенной при преобразованиях ошибки.
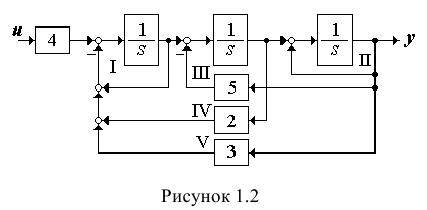
Пример №2
Определить передаточную функцию схемы (рисунок 1.2).
Решение:
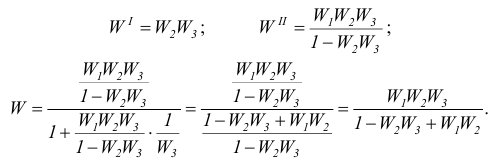
Применим правило Мейсона. В системе имеются обратные связи, поэтому ПФ представляет собой дробь. Прямой путь от входа  к выходу
к выходу  только один, его касаются все пять ЗКОС, поэтому в числителе ПФ пишем просто произведение
только один, его касаются все пять ЗКОС, поэтому в числителе ПФ пишем просто произведение  . Знаменатель начинаем описывать с несоприкасающихся контуров — контур I не имеет общих точек с контуром III и вложенным в него контуром И, поэтому записываем сначала произведение их определителей. Контур IV соприкасается с контурами I и III, поэтому просто добавляем произведение звеньев по нему
. Знаменатель начинаем описывать с несоприкасающихся контуров — контур I не имеет общих точек с контуром III и вложенным в него контуром И, поэтому записываем сначала произведение их определителей. Контур IV соприкасается с контурами I и III, поэтому просто добавляем произведение звеньев по нему  , но умножаем его на определитель контура И, так как этот ЗКОС не имеет общих точек с IV. И в конце просто добавляем произведение звеньев
, но умножаем его на определитель контура И, так как этот ЗКОС не имеет общих точек с IV. И в конце просто добавляем произведение звеньев  контура V, поскольку он соприкасается со всеми остальными ЗКОС
контура V, поскольку он соприкасается со всеми остальными ЗКОС

Дифференциальное уравнение
Поведение линейных, непрерывных, стационарных систем с сосредоточенными параметрами описывается во времени обыкновенным дифференциальным уравнением (ОДУ) с постоянными коэффициентами 

где слева — выходная функция  и ее производные (результат), справа — входная функция
и ее производные (результат), справа — входная функция  и ее производные.
и ее производные.
Для записи передаточной функции используется комплексная переменная Лапласа  (иногда обозначаемая символом
(иногда обозначаемая символом  ). Чтобы получить ПФ, достаточно в ОДУ заменить производные
). Чтобы получить ПФ, достаточно в ОДУ заменить производные  на
на  в соответствующей степени, отбросить символы функций и и разделить многочлен правой части дифференциального уравнения на многочлен левой части.
в соответствующей степени, отбросить символы функций и и разделить многочлен правой части дифференциального уравнения на многочлен левой части.
При нулевых начальных условиях передаточная функция может быть получена и как отношение реакции (выходного сигнала) системы к входному сигналу, записанных в виде изображений по Лапласу.
Она может быть записана триадой: корни многочлена числителя (нули), корни многочлена знаменателя (полюса) и общий коэффициент усиления. На комплексной плоскости нули обозначают кружком, полюса — крестиком; общий коэффициент усиления отобразить невозможно и он должен указываться отдельно.
При переходе от разомкнутой системы к замкнутой, охваченной общей единичной отрицательной обратной связью (ООС), достаточно к знаменателю ПФ разомкнутой системы добавить ее числитель, чтобы получить ПФ замкнутой системы.
Пример №3
Определить передаточную функцию объекта регулирования, модель которого задана дифференциальным уравнением

Решение:
Сопоставляя производным соответствующую степень , отбрасывая символы функций  и
и  и деля многочлен правой части дифференциального уравнения на многочлен левой части, получаем ПФ
и деля многочлен правой части дифференциального уравнения на многочлен левой части, получаем ПФ
Пример №4
При единичном скачке  на входе реакция звена описывается функцией
на входе реакция звена описывается функцией  . Найти передаточную функцию звена.
. Найти передаточную функцию звена.
Решение:
Преобразуем по Лапласу входной и выходной сигналы, пользуясь таблицей соответствия оригиналов и изображений (приложение  ). Изображение входного воздействия равно
). Изображение входного воздействия равно  , изображение реакции звена после приведения к общему знаменателю
, изображение реакции звена после приведения к общему знаменателю

Здесь единичный скачок не учитываем, хотя он и имеется в исходной функции, так как это просто указание на то, что сигнал на выходе появился скачком. Такое указание может и отсутствовать.
Делим изображение реакции на изображение входного воздействия и получаем передаточную функцию звена
Пример №5
Система имеет нуль -3, комплексные сопряженные полюса  и коэффициент усиления
и коэффициент усиления  . Определить ПФ системы после её замыкания единичной ООС.
. Определить ПФ системы после её замыкания единичной ООС.
Решение:
Передаточная функция разомкнутой системы равна

Добавляя к знаменателю числитель, получаем ПФ замкнутой системы

Принципиальная схема
Если анализируется принципиальная электрическая схема, передаточная функция составляется с учетом известных закономерностей работы таких схем. Для индуктивных элементов (катушек, дросселей) операторное реактивное сопротивление равно  для емкостных элементов
для емкостных элементов  , где
, где  — индуктивность (Генри),
— индуктивность (Генри),  -емкость (Фарад),
-емкость (Фарад),  — комплексная переменная Лапласа.
— комплексная переменная Лапласа.
В схемах с операционными усилителями (ОУ) учитывают, что инвертирующий вход изменяет знак (полярность) проходящего сигнала. Коэффициент усиления каскада на ОУ равен отношению эквивалентного сопротивления в цепи обратной связи к эквивалентному сопротивлению на входе усилителя.
По передаточной функции объекта можно записать дифференциальное уравнение, предполагая, что сокращение одинаковых нулей и полюсов не производилось. По изображению некоторого сигнала можно записать его оригинал.
Пример №6
Определить передаточную функцию схемы (рисунок 1.12).
Решение:
Схема представляет собой делитель напряжения с коэффициентом

поэтому передаточная функция равна
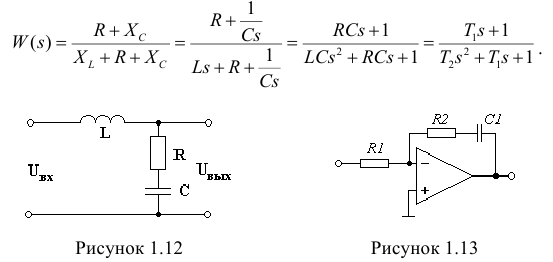
Пример №7
Определить передаточную функцию схемы (рисунок 1.13).
Решение:
Эквивалентное операторное сопротивление в цепи отрицательной обратной связи равно сумме

в итоге передаточная функция схемы на инвертирующем операционном усилителе будет равна

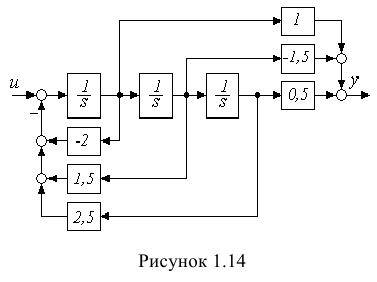
Пример №8
Составить структурную схему по дифференциальному уравнению объекта

Решение:
Прежде всего уравнение нормируют (делят все коэффициенты на коэффициент  при старшей производной левой части), получим
при старшей производной левой части), получим

Затем составляют структурную схему, используя блоки интегрирования (т.е. деления на переменную Лапласа ), их число равно порядку системы  (в данном случае трём). С выхода каждого интегратора организуют обратные связи к общему (входному) сумматору с инвертирующим входом, начиная с коэффициента
(в данном случае трём). С выхода каждого интегратора организуют обратные связи к общему (входному) сумматору с инвертирующим входом, начиная с коэффициента  при -1 производной. С выхода интеграторов организуют связи с коэффициентами из правой части ОДУ к выходному сумматору объекта (если производные здесь отсутствуют, то выходной сумматор не нужен, а блок с коэффициентом
при -1 производной. С выхода интеграторов организуют связи с коэффициентами из правой части ОДУ к выходному сумматору объекта (если производные здесь отсутствуют, то выходной сумматор не нужен, а блок с коэффициентом  можно поместить и на выходе, и на входе системы, до главного сумматора). Полученная схема показана на рисунке 1.14.
можно поместить и на выходе, и на входе системы, до главного сумматора). Полученная схема показана на рисунке 1.14.
Пример №9
Определить порядок объекта, записать его дифференциальное уравнение по передаточной функции
Решение:
Порядок объекта равен трем. Обозначив в соответствии с индексами передаточной функции выходную величину  , входную величину
, входную величину  , заменяем комплексную переменную Лапласа производной по времени соответствующего порядка
, заменяем комплексную переменную Лапласа производной по времени соответствующего порядка

Временные характеристики. Реакция на произвольное воздействие
Для решения дифференциального уравнения (нахождения реакции системы) с помощью преобразования Лапласа необходимо:
Рекомендуется:
а) перед вычислением корней обязательно нормировать ПФ по старшему коэффициенту при  знаменателя;
знаменателя;
б) не сокращать существующие нули и полюса с положительной действительной частью, ведущие к неустойчивости системы, если их части не являются целыми числами; остальные нули и полюса могут быть сокращены перед переходом во временную область;
в) для кратных полюсов записывать дробями все степени корня от наибольшей до первой в порядке их убывания;
г) комплексные сопряженные корни представлять одним общим квадратным трехчленом.
После разложения на простые дроби и вычисления вычетов полезно проверить правильность результата. Первое правило проверки -сумма дробей правой части должна быть равна изображению в левой части равенства. Второе правило проверки — сумма всех составляющих оригинала при  (начальное значение оригинала) в соответствии со свойствами преобразования Лапласа должна быть равна
(начальное значение оригинала) в соответствии со свойствами преобразования Лапласа должна быть равна  .
.
Пример №10
Используя преобразование Лапласа, найти оригинал реакции на воздействие  системы с ПФ
системы с ПФ  . Находим изображение по Лапласу входного воздействия
. Находим изображение по Лапласу входного воздействия  , умножаем его на передаточную функцию системы, получаем изображение реакции
, умножаем его на передаточную функцию системы, получаем изображение реакции
Решение:
При переходе от изображения к оригиналу коэффициент 4 сохраняется, полюс -2 образует составляющую , а поскольку он кратный (два одинаковых корня), то появляется составляющая  и, наконец, оператор сдвига
и, наконец, оператор сдвига  при
при  с создаёт запаздывание во времени, которое отображается скачком со сдвигом вида
с создаёт запаздывание во времени, которое отображается скачком со сдвигом вида  или, в данном случае,
или, в данном случае,  . Окончательно оригинал равен
. Окончательно оригинал равен 

Пример №11
Найти начальное, конечное значения и аналитическую запись для оригинала, если изображение по Лапласу отклика системы равно

Решение:
Начальное значение оригинала (при  ) вычисляется как предел
) вычисляется как предел

для производной по времени -го порядка от функции производится умножение изображения на  т.е.
т.е.

Поэтому

Конечное значение оригинала (при  ) для устойчивых систем также вычисляется как предел
) для устойчивых систем также вычисляется как предел


Для полной записи оригинала разлагаем изображение на простые дроби в соответствии с полюсами, находим вычеты  и
и  в полюсах методом подстановки полюсов (приложение Б)
в полюсах методом подстановки полюсов (приложение Б)
По таблице соответствия оригиналов и изображений (приложение А) записываем оригинал в виде формулы  . Проверка: при
. Проверка: при  значение оригинала равно нулю, при
значение оригинала равно нулю, при  соответственно 3.
соответственно 3.
Переходная и импульсная функции
К типовым функциям времени (реакциям системы) относятся переходная и импульсная переходная (весовая) функции.
Переходной функцией  называется реакция системы на единичный скачок при нулевых начальных условиях. Реакция на скачок произвольной величины называется кривой разгона.
называется реакция системы на единичный скачок при нулевых начальных условиях. Реакция на скачок произвольной величины называется кривой разгона.
Импульсной (весовой) функцией  или
или  называется реакция системы на единичный импульс при нулевых начальных условиях. Она является оригиналом передаточной функции.
называется реакция системы на единичный импульс при нулевых начальных условиях. Она является оригиналом передаточной функции.
Поскольку всегда  то
то

Для оценки начального и конечного (установившегося) значений переходной характеристики объекта нужно найти отношение коэффициентов при в степени числителя и знаменателя ПФ в первом случае, и отношение свободных членов передаточной функции во втором (если объект устойчив).
Связь между импульсной и переходной функциями определяется соотношением
откуда

Иначе говоря, импульсная функция является производной по времени от переходной функции.
Пример №12
Для системы  найти
найти  и
и  .
.
Решение:
Поскольку порядок многочлена числителя ПФ  равен порядку многочлена знаменателя
равен порядку многочлена знаменателя  , начальное значение переходной функции равно
, начальное значение переходной функции равно

Коэффициент усиления в установившемся режиме равен

Пример №13
Определить передаточную функцию объекта регулирования, если его весовая функция равна

Решение:
По таблице соответствия АЛ находим изображение весовой функции (а это уже и есть передаточная функция объекта)
Приведя все дроби к общему знаменателю, получим ПФ в стандартном виде

Пример №14
Найти весовую функцию системы, если переходная функция равна

Решение:
Весовая функция равна производной по времени от переходной
Другой путь решения — через преобразование Лапласа

убираем нулевой корень s в знаменателе, принадлежащий входному воздействию — скачку, получаем ПФ или изображение весовой функции
откуда весовая функция

Свободное движение системы
В общем случае реакция системы состоит из вынужденной и свободной составляющих  , изображения которых имеют одинаковый знаменатель (характеристический полином системы)
, изображения которых имеют одинаковый знаменатель (характеристический полином системы)

Вынужденная составляющая  является реакцией системы на входное воздействие при нулевых начальных условиях
является реакцией системы на входное воздействие при нулевых начальных условиях  . Свободная составляющая
. Свободная составляющая  или переходный процесс автономной системы является решением однородного дифференциального уравнения (без правой части) и определяется начальными условиями.
или переходный процесс автономной системы является решением однородного дифференциального уравнения (без правой части) и определяется начальными условиями.
Используют два способа вычисления совокупного переходного процесса. В первом случае система обычно задается ОДУ, производят в соответствии со свойством дифференцирования преобразования Лапласа индивидуальное преобразование каждого члена дифференциального уравнения, вычисляются одновременно вынужденная и свободная составляющие.
По второму способу выполняют независимое вычисление вынужденной и/или свободной составляющих, при этом система обычно задана ПФ или структурной схемой. Для вычисления  по
по  используется формула (схожая, но не равная вычислению производной)
используется формула (схожая, но не равная вычислению производной)
Если рассчитывается полное движение системы с учетом ненулевых начальных условий, запрещается производить сокращения в левой части ОДУ (в характеристическом полиноме системы). Вид характеристического полинома определяет свободную составляющую переходного процесса, т.е. реакцию на начальные условия.
Если начальные условия не заданы, то по умолчанию они считаются нулевыми. После получения результата стоит проверить, соответствует ли величина реакции на выходе при  заданным начальным условиям.
заданным начальным условиям.
Пример №15
Для системы, заданной ОДУ  , найти реакцию на начальные условия
, найти реакцию на начальные условия  .
.
Решение:
Преобразуем индивидуально каждый член ОДУ по Лапласу с учетом свойств дифференцирования оригинала при ненулевых начальных условиях

Группируем и переносим подобные члены, подставляем значения 
Находим корни характеристического уравнения  по известной формуле
по известной формуле

записываем разложение на простые дроби, вычисляем вычеты в полюсах (смотри приложение Б), переходим к оригиналу по таблице А.1
При начальное значение  , как и было задано.
, как и было задано.
Пример №16
Система задана ОДУ

Найти реакцию системы, если

Решение:
Прежде всего находим изображение входного воздействия по Лапласу  из таблицы А.1. Вычисляем передаточную функцию и вынужденную составляющую переходного процесса
из таблицы А.1. Вычисляем передаточную функцию и вынужденную составляющую переходного процесса
Определяем по характеристическому полиному числитель  и свободную составляющую переходного процесса
и свободную составляющую переходного процесса
Полное описание переходного процесса

Частотные характеристики. Основные частотные характеристики
Аналитическое выражение для комплексного коэффициента передачи  можно получить по операторной передаточной функции
можно получить по операторной передаточной функции  , приравняв в переменной Лапласа
, приравняв в переменной Лапласа  действительную часть а нулю. Из комплексной передаточной функции
действительную часть а нулю. Из комплексной передаточной функции

получают амплитудную (АЧХ)  , фазовую (ФЧХ)
, фазовую (ФЧХ)  , действительную (ВЧХ)
, действительную (ВЧХ)  и мнимую (МЧХ)
и мнимую (МЧХ)  частотные характеристики, связанные соотношениями
частотные характеристики, связанные соотношениями

Если представить комплексный коэффициент передачи в виде дроби
то амплитудная характеристика будет равна
а фазовая характеристика

Обобщающей является амплитудно-фазовая частотная характеристика (АФЧХ или просто АФХ) — кривая (годограф), которую чертит на комплексной плоскости конец вектора при изменении частоты  от 0 до
от 0 до  .
.
В ходе расчетов следует отбросить отрицательные, мнимые и комплексные частоты и по возможности сократить получающиеся выражения для действительной и мнимой частей на со.
При построении частотных характеристик учитывают гладкость кривой (при разрывах годограф изменяется асимптотически), указывают на графике стрелкой направление увеличения частоты и/или крайние частоты. В каком бы порядке не были расположены частоты в таблице, построение кривой следует всегда производить по возрастанию значений частоты.
Быстрая проверка правильности расчетов:
Реакцию системы на гармоническое воздействие любой частоты со в показательной форме получают путем умножения на  амплитуды входного сигнала и добавления
амплитуды входного сигнала и добавления  к его фазе.
к его фазе.
Пример №17
Построить частотные характеристики системы с ПФ  .
.
Решение:
Подставляем  учитывая, что
учитывая, что  , снижаем порядок
, снижаем порядок  (
( и т.п.), избавляемся от мнимости в знаменателе, умножая числитель и знаменатель дроби на комплексное выражение, сопряженное стоявшему в знаменателе, отделяем действительную и мнимую части, приводим в знаменателе подобные члены
и т.п.), избавляемся от мнимости в знаменателе, умножая числитель и знаменатель дроби на комплексное выражение, сопряженное стоявшему в знаменателе, отделяем действительную и мнимую части, приводим в знаменателе подобные члены
В данном случае числители и знаменатели дробей (действительной и мнимой частей) на сократить нельзя. Составляем таблицу (таблица 1), используя обязательные значения частот (можно взять больше точек, но не меньше), и подставляем эти значения:
- крайние частоты 0 и
 ;
; - частоты пересечения характеристик с осями (определяются путем приравнивания числителей дробей мнимой и действительной части к нулю и решения полученного уравнения);
- частоты разрыва характеристики (находят, приравнивая знаменатель нулю и решая уравнение) и близкие к ним (чуть больше-чуть меньше) частоты;
- прочие частоты для повышения точности расчета.
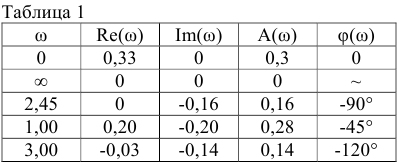
Приравнивая  , получаем
, получаем  , откуда = 2,45.
, откуда = 2,45.
Приравнивая  , получаем 10 = 0, откуда = 0.
, получаем 10 = 0, откуда = 0.
По виду биквадратного уравнения  определяем, что частот разрыва (действительных корней) нет. Частоты 1 и 3 рад/с добавлены произвольно для более точного построения графика.
определяем, что частот разрыва (действительных корней) нет. Частоты 1 и 3 рад/с добавлены произвольно для более точного построения графика.
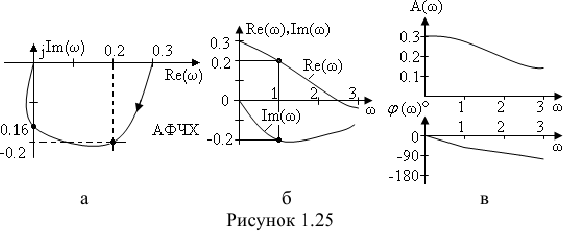
По одной таблице можно построить АФЧХ на комплексной плоскости (рисунок 1.25, а), индивидуально ВЧХ и МЧХ (рисунок 1.25, б), и после дополнительных расчетов АЧХ и ФЧХ (рисунок 1.25, В).
Пример №18
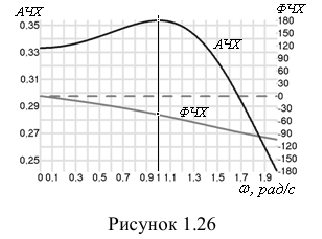
Записать аналитически реакцию системы с известными АЧХ и ФЧХ (рисунок 1.26) на воздействие 
Решение:
Общий вид гармонического сигнала  . Следовательно, входное воздействие характеризуется параметрами: амплитуда 3,5, фаза 0 рад, частота = 1 рад/с. Находим для этой частоты по графику
. Следовательно, входное воздействие характеризуется параметрами: амплитуда 3,5, фаза 0 рад, частота = 1 рад/с. Находим для этой частоты по графику

Отсюда амплитуда выходной величины равна 3,5 0,36 = 1,26; фаза выходной величины 0 — 0.785 рад и окончательный вид реакции

Пример №19
При воздействии  найти сигнал на выходе системы с передаточной функцией
найти сигнал на выходе системы с передаточной функцией  .
.
Решение:
Получаем по ПФ аналитические выражения для АЧХ и ФЧХ

Для известной частоты 10 рад/с значения АЧХ и ФЧХ равны

Выражение для выходного гармонического сигнала

Логарифмические частотные характеристики
Зависимость  от
от  называется логарифмической амплитудной частотной характеристикой (ЛАЧХ) или ЛАХ. Зависимость
называется логарифмической амплитудной частотной характеристикой (ЛАЧХ) или ЛАХ. Зависимость  от называется логарифмической фазной частотной характеристикой (ЛФЧХ) или просто ЛФХ. Частоту откладывают либо в логарифмах (в декадах), либо в радианах, но с учетом логарифмического масштаба. Декада соответствует изменению частоты в 10 раз,
от называется логарифмической фазной частотной характеристикой (ЛФЧХ) или просто ЛФХ. Частоту откладывают либо в логарифмах (в декадах), либо в радианах, но с учетом логарифмического масштаба. Декада соответствует изменению частоты в 10 раз,  откладывают в децибелах (дБ), в градусах.
откладывают в децибелах (дБ), в градусах.
Для упрощения при построении вручную действительную ЛАЧХ заменяют асимптотической, т.е. ломаной линией из прямых отрезков, имеющих стандартный наклон, кратный ±20дБ/дек.
Частоты пересечения отрезков со а называются частотами сопряжения, они соответствуют корням ПФ. Частоты пересечения ЛАЧХ с осью абсцисс  называются частотой среза, они соответствуют значению
называются частотой среза, они соответствуют значению  или
или  (усиление или ослабление сигнала на частоте среза отсутствует). Для удобства построения через значения сопрягающих частот проводят на графике вертикальные линии, а на свободном поле графика — вспомогательные линии со стандартными наклонами
(усиление или ослабление сигнала на частоте среза отсутствует). Для удобства построения через значения сопрягающих частот проводят на графике вертикальные линии, а на свободном поле графика — вспомогательные линии со стандартными наклонами  (-20) дБ/дек.
(-20) дБ/дек.
Частоты сопряжения находят по корням (постоянным времени  ) простых дробей, на которые разбивают ПФ, или типовых звеньев, из которых состоит структурная схема системы регулирования.
) простых дробей, на которые разбивают ПФ, или типовых звеньев, из которых состоит структурная схема системы регулирования.
Звено первого порядка (один действительный корень)

Звено второго порядка (комплексные сопряженные корни)
где  — показатель затухания (коэффициент демпфирования), характеризует величину резонанса в звене. При = 1 резонанс отсутствует, при
— показатель затухания (коэффициент демпфирования), характеризует величину резонанса в звене. При = 1 резонанс отсутствует, при  резонансный выброс
резонансный выброс  стремится к бесконечности. При значениях < 0,6 асимптотическую ЛАЧХ корректируют на величину выброса , определяемого по формуле
стремится к бесконечности. При значениях < 0,6 асимптотическую ЛАЧХ корректируют на величину выброса , определяемого по формуле  где
где  — число одинаковых корней (кратность корня), либо по типовым характеристикам (таблица 2) и графикам.
— число одинаковых корней (кратность корня), либо по типовым характеристикам (таблица 2) и графикам.

Левую (начальную) часть ЛАЧХ (низкочастотную или НЧ-асимптоту) или ее продолжение проводят через точку с координатами  и
и  слева направо с наклоном
слева направо с наклоном  (-20 дБ/дек) до первой (наименьшей) частоты сопряжения. Здесь
(-20 дБ/дек) до первой (наименьшей) частоты сопряжения. Здесь  это степень астатизма,
это степень астатизма,  — число нулевых корней знаменателя, — числителя; добротность
— число нулевых корней знаменателя, — числителя; добротность  — отношение свободных членов полиномов числителя и знаменателя ПФ после удаления нулевых корней.
— отношение свободных членов полиномов числителя и знаменателя ПФ после удаления нулевых корней.
Двигаясь вправо, на каждой частоте сопряжения продолжают ЛАЧХ с отклонением от предыдущего направления: для корня числителя вверх (+20 дб/дек); для корня знаменателя вниз (-20 дБ/дек). Если кратность корня  , наклон асимптоты изменяется в раз. Общий наклон ЛАЧХ в конце равен
, наклон асимптоты изменяется в раз. Общий наклон ЛАЧХ в конце равен  -(-20 дБ/дек). Выбросы при комплексных корнях откладывают вверх для корней знаменателя, вниз для корней числителя, близкие выбросы суммируются графически.
-(-20 дБ/дек). Выбросы при комплексных корнях откладывают вверх для корней знаменателя, вниз для корней числителя, близкие выбросы суммируются графически.
ЛФЧХ устойчивых систем строят по шаблону, неустойчивых -по вычисляемым точкам. Приближенно считают, что участку ЛАЧХ с наклоном ±20 дБ/дек соответствует фазовый сдвиг около ±90°, а участку с наклоном ±40 дБ/дек сдвиг на ±180°; действительному корню знаменателя соответствует угол наклона ЛФЧХ на сопрягающей частоте  , комплексной паре
, комплексной паре 

У статических систем (степень астатизма  = 0) НЧ-асимптота представляет собой прямую, параллельную оси частот, и значение в децибелах равно расстоянию этой прямой от оси частот . У астатических систем находят частоту
= 0) НЧ-асимптота представляет собой прямую, параллельную оси частот, и значение в децибелах равно расстоянию этой прямой от оси частот . У астатических систем находят частоту  пересечения НЧ-асимптоты или её продолжения с осью частот, откуда
пересечения НЧ-асимптоты или её продолжения с осью частот, откуда  . Степень астатизма определяется по наклону НЧ-асимптоты относительно оси частот, частоты сопряжения находят по точкам пересечения асимптот — касательных, проведенных к линейным участкам реальной ЛАЧХ.
. Степень астатизма определяется по наклону НЧ-асимптоты относительно оси частот, частоты сопряжения находят по точкам пересечения асимптот — касательных, проведенных к линейным участкам реальной ЛАЧХ.
Пример №20
Построить ЛАЧХ системы, заданной структурной схемой (рисунок 1.31, а). Передаточная функция системы равна

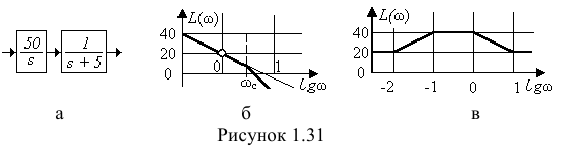
Решение:
Определяем параметры НЧ-асимптоты:
Нули в системе отсутствуют, полюс -5 имеется, отсюда частота сопряжения  Строим график ЛАЧХ толстой сплошной линией, проводя слева вниз прямую линию с наклоном 1 х(-20 дБ/дек) через точку с координатами (20 дБ, 0) до первой частоты сопряжения (рисунок 1.31, б). Поскольку частота сопряжения соответствует полюсу, отклоняемся от текущего направления вниз на угол -20 дБ/дек, общий наклон ЛАЧХ в конце равен -40 дБ/дек. Корень действительный, поэтому резонанса нет, выбросы не учитываем.
Строим график ЛАЧХ толстой сплошной линией, проводя слева вниз прямую линию с наклоном 1 х(-20 дБ/дек) через точку с координатами (20 дБ, 0) до первой частоты сопряжения (рисунок 1.31, б). Поскольку частота сопряжения соответствует полюсу, отклоняемся от текущего направления вниз на угол -20 дБ/дек, общий наклон ЛАЧХ в конце равен -40 дБ/дек. Корень действительный, поэтому резонанса нет, выбросы не учитываем.
Пример №21
Составить ПФ системы с заданной ЛАЧХ (рисунок 1.31, в), предполагая, что все корни имеют отрицательную действительную часть.
Решение:
На частотах сопряжения  наблюдается отклонение характеристики от предыдущего направления вверх на +20 дБ/дек, на частотах сопряжения
наблюдается отклонение характеристики от предыдущего направления вверх на +20 дБ/дек, на частотах сопряжения 
 — вниз на -20 дБ/дек, поэтому передаточная функция будет иметь вид
— вниз на -20 дБ/дек, поэтому передаточная функция будет иметь вид
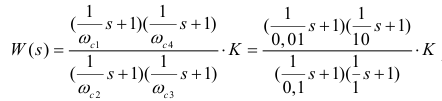
Поскольку

и окончательно

Устойчивость непрерывных стационарных систем. Математический и физический признаки устойчивости
Устойчивость — это свойство системы возвращаться в исходное состояние равновесия после снятия воздействия, выведшего систему из этого состояния.
Математический (прямой) признак устойчивости: система устойчива, если все корни её характеристического уравнения имеют отрицательную действительную часть. Другими словами — если все полюса системы левые (лежат слева от мнимой оси комплексной плоскости). Корни полинома числителя передаточной функции (нули) на устойчивость системы не влияют.
Если хотя бы один полюс располагается справа от мнимой оси, система неустойчива. Она находится на апериодической границе устойчивости, если при остальных левых корнях имеет один нулевой корень, и на колебательной (периодической) границе устойчивости, если при остальных левых корнях характеристического уравнения имеет пару чисто мнимых корней (значение со мнимой части таких корней равно частоте незатухающих колебаний системы на границе устойчивости).
Физический признак устойчивости: система устойчива, если свободная составляющая  переходного процесса (импульсная функция
переходного процесса (импульсная функция  ) с увеличением времени стремится к нулю, неустойчива, если она стремится к бесконечности, и нейтральна (находится на границе устойчивости), если она стремится к некоторой постоянной величине (амплитуде). Для анализа подходит любая реакция системы, если из нее исключить составляющую, обусловленную вынуждающим сигналом. Нельзя применять для анализа формулу
) с увеличением времени стремится к нулю, неустойчива, если она стремится к бесконечности, и нейтральна (находится на границе устойчивости), если она стремится к некоторой постоянной величине (амплитуде). Для анализа подходит любая реакция системы, если из нее исключить составляющую, обусловленную вынуждающим сигналом. Нельзя применять для анализа формулу  , т.к. она может давать нулевой результат и для неустойчивых систем.
, т.к. она может давать нулевой результат и для неустойчивых систем.
Пример №22
Оценить прямым методом устойчивость системы, описываемой дифференциальным уравнением

Решение:
Характеристическое уравнение системы

имеет нулевой корень  и комплексно-сопряженную пару корней, определяемую из квадратного трехчлена
и комплексно-сопряженную пару корней, определяемую из квадратного трехчлена

Система находится на апериодической границе устойчивости, т.к. нулевой корень находится на мнимой оси комплексной плоскости корней, а остальные корни лежат слева от мнимой оси.
Пример №23
Оценить устойчивость системы со свободной составляющей переходного процесса

Решение:
Выражение содержит гармонические составляющие с постоянной амплитудой (не затухающие и не расходящиеся с течением времени), отсюда вывод: система находится на колебательной границе устойчивости. Частота незатухающих колебаний, соответствующая колебательной границе устойчивости, равна 1 рад/с или  .
.
Алгебраические критерии устойчивости. Критический коэффициент усиления
Критерий Гурвица: система устойчива, если все коэффициенты ее характеристического уравнения

и все диагональные миноры  матрицы Гурвица положительны.
матрицы Гурвица положительны.
Для устойчивости систем первого и второго порядка необходимо и достаточно, чтобы все коэффициенты характеристического уравнения были положительны (были одного знака). Достаточные условия для системы третьего порядка

для системы четвертого порядка

Критерий Гурвица удобно использовать при устном счете для систем не выше четвертого порядка.
Критерий Рауса: система устойчива, если все коэффициенты ее характеристического уравнения и все элементы первого столбца таблицы Рауса положительны. Необходимое условие (положительность всех коэффициентов) совпадает с критерием Гурвица.
Для проверки достаточного условия составляют таблицу, первую и вторую строки которой заполняют попарно коэффициентами характеристического уравнения, начиная со старшего, недостающие коэффициенты заменяют нулем. Элементы последующих строк вычисляют по формулам

где  — номер строки,
— номер строки,  — номер столбца,
— номер столбца,  — вспомогательное число для /-той строки. Таблица содержит
— вспомогательное число для /-той строки. Таблица содержит  строку и ()/2 с округлением столбец.
строку и ()/2 с округлением столбец.
Число правых корней характеристического уравнения равно числу перемен знака элементов первого столбца таблицы Рауса. При положительности остальных элементов первого столбца система находится на апериодической границе устойчивости, если равен нулю последний элемент столбца  , и на периодической границе устойчивости, если равен нулю какой-либо иной элемент первого столбца.
, и на периодической границе устойчивости, если равен нулю какой-либо иной элемент первого столбца.
Критическим или предельным (граничным) называется значение параметра (коэффициента), входящего в характеристическое уравнение, при котором система находится на границе устойчивости. Для его определения формулируют условия нахождения системы на границе устойчивости по какому-нибудь критерию.
Пример №24
Оценить по критерию Гурвица устойчивость системы
Решение:
Характеристическое уравнение

Проверяем необходимое условие — все коэффициенты характеристического уравнения положительны, что можно кратко записать как «условие  выполняется».
выполняется».
Проверяем достаточное условие по определителю Гурвица
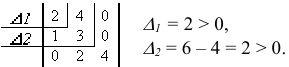
Оба диагональных минора положительны. Так как необходимое и достаточное условия выполняются, система устойчива.
Пример №25
Оценить по Раусу устойчивость системы с характеристическим уравнением

Решение:
Необходимое условие выполняется.
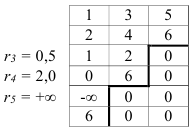
Проверяем достаточное условие -составляем таблицу Рауса: число строк равно числу коэффициентов (шесть), число столбцов 6/2 = 3. Заполняем две первые строки попарно коэффициентами с четными  и нечетными
и нечетными  индексами. Последний коэффициент
индексами. Последний коэффициент  смещается вниз и влево ходом шахматного коня (три клетки вниз и одна влево), ниже него записываем нули. Вычисляем вспомогательное число и элементы третьей строки:
смещается вниз и влево ходом шахматного коня (три клетки вниз и одна влево), ниже него записываем нули. Вычисляем вспомогательное число и элементы третьей строки:  ; откуда
; откуда 
 , затем элементы остальных строк.
, затем элементы остальных строк.
В первом столбце имеется отрицательное число, следовательно, система неустойчива. Число перемен знака в первом столбце равно двум (от 1 к  и от к 6), значит система имеет два правых корня характеристического уравнения, остальные три корня левые.
и от к 6), значит система имеет два правых корня характеристического уравнения, остальные три корня левые.
Пример №26
Найти критическое значение коэффициента усиления  системы с характеристическим уравнением
системы с характеристическим уравнением

Решение:
Формулируем условия нахождения системы на границе устойчивости по критерию Гурвица (он наиболее удобен и нагляден для систем первого-третьего порядка):
Оценить устойчивость по критерию Рауса системы с характеристическим уравнением

Частотные критерии устойчивости. Критерий Михайлова Согласно принципу аргумента, известному в теории комплексной переменной, если среди  полюсов ПФ системы
полюсов ПФ системы  расположены справа от мнимой оси, а остальные
расположены справа от мнимой оси, а остальные  — слева, то полное изменение аргумента комплексной функции
— слева, то полное изменение аргумента комплексной функции  равно
равно

Отсюда следует, что линейная система -го порядка устойчива, если при изменении частоты со от нуля до плюс бесконечности характеристический вектор системы повернется против часовой стрелки на угол  , не обращаясь нигде в ноль.
, не обращаясь нигде в ноль.
Конец вектора при изменении частоты чертит годограф Михайлова или характеристическую кривую. На этом основана другая формулировка критерия, чаще используемая в инженерной практике.
Система -го порядка устойчива, если кривая Михайлова, начинаясь при  =0 на действительной положительной полуоси, проходит при изменении частоты от нуля до плюс бесконечности последовательно против часовой стрелки квадрантов комплексной плоскости.
=0 на действительной положительной полуоси, проходит при изменении частоты от нуля до плюс бесконечности последовательно против часовой стрелки квадрантов комплексной плоскости.
Система находится на апериодической границе устойчивости, если кривая при = 0 начинается в начале координат, и на периодической границе устойчивости, если кривая при  проходит через начало координат. Частота незатухающих колебаний соответствует периодической границе устойчивости системы.
проходит через начало координат. Частота незатухающих колебаний соответствует периодической границе устойчивости системы.
Кривая Михайлова представляет собой уходящую в бесконечность развертывающуюся спираль, у которой при высоком порядке уравнения практически не видно начальную часть, вследствие этого её допускается чертить не в точном масштабе, а лишь фиксируя последовательность и места пересечения с осями. На графике с кривой Михайлова обязательно должен указываться порядок системы , так как при его отсутствии может быть сделан ошибочный вывод.
Действительная часть

содержит только четные степени переменной со и называется четной функцией, мнимая часть

содержит только нечетные степени переменной со и называется нечетной функцией. На их использовании основано следствие или вторая форма критерия Михайлова.
Система устойчива, если четная  и нечетная
и нечетная  функции при изменении частоты со от нуля до плюс бесконечности обращаются в нуль поочередно, начиная с нечетной функции, т.е. их корни чередуются. Это вытекает из условия последовательного прохождения квадрантов комплексной плоскости. Для построения графика используется та же таблица частот, что и в первой форме.
функции при изменении частоты со от нуля до плюс бесконечности обращаются в нуль поочередно, начиная с нечетной функции, т.е. их корни чередуются. Это вытекает из условия последовательного прохождения квадрантов комплексной плоскости. Для построения графика используется та же таблица частот, что и в первой форме.
Пример №27
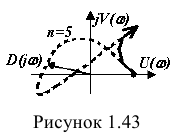
Система пятого порядка с кривой Михайлова (рисунок 1.43) неустойчива, т.к. сначала вектор повернулся против часовой стрелки на три квадранта (три левых полюса), а затем по часовой стрелке на два квадранта (два правых полюса).
Решение:
Иначе: итоговый поворот равен одному квадранту, т.е. 
 , тогда правых корней характеристического полинома (5-1 )/2 = 2.
, тогда правых корней характеристического полинома (5-1 )/2 = 2.
Пример №28
Найти критическое значение коэффициента усиления системы с

по критерию Михайлова.
Решение:
Заменяя  получим характеристическую функцию
получим характеристическую функцию

Условия нахождения САУ на границе устойчивости
Корень второго уравнения  отбрасываем, т.к. для нахождения системы на колебательной границе устойчивости годограф Михайлова должен пройти через начало координат при .
отбрасываем, т.к. для нахождения системы на колебательной границе устойчивости годограф Михайлова должен пройти через начало координат при .
Тогда из второго уравнения определяем частоту
и подставляем ее значение в первое уравнение

Частота, соответствующая колебательной границе устойчивости

Пример №29
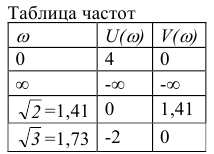
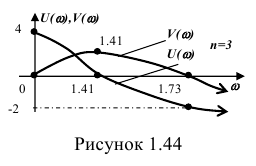
Используя вторую форму (следствие) критерия Михайлова, оценить устойчивость системы
Решение:
В характеристическом уравнении

заменяем  , снижаем порядок
, снижаем порядок  и группируем
и группируем

Здесь  — это четная (действительная) функция
— это четная (действительная) функция  , а
, а  — это нечетная (мнимая) функция
— это нечетная (мнимая) функция  .
.
Приравнивая поочередно четную и нечетную функции нулю, находим частоты 1,41 и 1,73, соответствующие пересечению кривой с осями координат, подставляем эти частоты в характеристическую функцию и заполняем таблицу. Строим графики четной и нечетной функций — они поочередно пересекают ось частот, т.е. их корни перемежаются, и общее число пересечений равно  , следовательно, система устойчива (рисунок 1.44).
, следовательно, система устойчива (рисунок 1.44).
 -разбиение по одному параметру
-разбиение по одному параметру
Областью устойчивости (0) называют область в пространстве изменяемых параметров, каждой точке которой соответствуют только левые корни характеристического уравнения. Остальные -области отличаются числом правых корней характеристического уравнения и обозначаются соответственно (1) — область с одним правым полюсом, (2) — с двумя и т.д.
Подставив в характеристическое уравнение системы, разрешают его относительно изменяемого параметра, находят четную (действительную) и нечетную (мнимую) функции. Изменяя частоту от 0 до плюс бесконечности, строят кривую -разбиения и ее зеркальное отображение относительно действительной оси. Двигаясь по кривой от точки  до точки
до точки  , наносят штриховку слева от кривой.
, наносят штриховку слева от кривой.
Направление штриховки указывает на область с наибольшим числом левых корней. При каждом переходе через кривую навстречу штриховке один корень характеристического уравнения становится правым, в обратном направлении — левым. Выбранную по штриховке область-претендент (0) проверяют на устойчивость с помощью любого критерия, подставив значение параметра из этой области в характеристическое уравнение. Поскольку изменяемый параметр является действительной величиной, его допустимые значения лежат на отрезке действительной оси, заключенном внутри области устойчивости ( 0).
Пример №30
Найти методом -разбиения критические значения коэффициента усиления к системы, заданной передаточной функцией
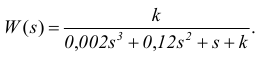
Решение:
Разрешаем характеристическое уравнение системы

относительно исследуемого параметра 

производим замену

снижаем порядок и группируем

Определяем частоты пересечения основной кривой с осями:
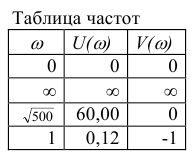

Строим основную и зеркальную кривые на комплексной плоскости, указывая направление возрастания частоты стрелкой на характеристике (рисунок 1.47). Наносим штриховку, обозначаем области с предполагаемым числом правых полюсов в скобках. Проверяем область-претендент (0) на устойчивость по критерию Гурвица при значении  , выбранном на отрезке внутри области (0) между точками 0 и 60
, выбранном на отрезке внутри области (0) между точками 0 и 60


Так как и необходимое, и достаточное условия устойчивости по Гурвицу при выполняются, то система будет устойчивой при любых значениях коэффициента усиления в интервале 0 < < 60. Критические значения коэффициента равны

Критерий Найквиста. Запасы устойчивости Упрощенная формулировка: система, устойчивая в разомкнутом состоянии или нейтральная, будет устойчивой в замкнутом состоянии, если АФЧХ разомкнутой системы при изменении частоты  от нуля до плюс бесконечности не охватывает точку с координатами
от нуля до плюс бесконечности не охватывает точку с координатами  . Всегда подразумевается замыкание системы единичной ООС.
. Всегда подразумевается замыкание системы единичной ООС.
Общая формулировка: система после замыкания будет устойчивой, если АФЧХ разомкнутой системы охватывает в положительном направлении (против часовой стрелки)  раз точку с координатами , где — число правых полюсов разомкнутой системы.
раз точку с координатами , где — число правых полюсов разомкнутой системы.
Оценка запасов устойчивости по АФЧХ. Запасы устойчивости по амплитуде  в относительных единицах равны расстоянию от критической точки до ближайших точек пересечения АФЧХ с отрицательной действительной полуосью. В децибелах запас устойчивости по амплитуде находят как величину, обратную амплитуде
в относительных единицах равны расстоянию от критической точки до ближайших точек пересечения АФЧХ с отрицательной действительной полуосью. В децибелах запас устойчивости по амплитуде находят как величину, обратную амплитуде  вектора
вектора  при угле -180° или
при угле -180° или  , где — расстояние от точки пересечения АФЧХ с отрицательной действительной полуосью до начала координат. Норма
, где — расстояние от точки пересечения АФЧХ с отрицательной действительной полуосью до начала координат. Норма  или 6-12 дБ.
или 6-12 дБ.
Запас устойчивости по фазе  равен углу между отрицательной действительной полуосью и лучом, проведенным из начала координат в точку пересечения АФЧХ с дугой единичного радиуса. Запас по фазе
равен углу между отрицательной действительной полуосью и лучом, проведенным из начала координат в точку пересечения АФЧХ с дугой единичного радиуса. Запас по фазе  находится в пределах от 0 до 180°, при проектировании обычно нормой является
находится в пределах от 0 до 180°, при проектировании обычно нормой является  .
.
Система устойчива в замкнутом состоянии, если обратная АФЧХ  разомкнутой системы охватывает точку .
разомкнутой системы охватывает точку .
Логарифмический критерий Найквиста (диаграмма Боде). Обычная формулировка: замкнутая система устойчива, если в момент пересечения ЛФЧХ разомкнутой системы линии -180° её ЛАЧХ отрицательна. Общая формулировка пригодна и для систем, неустойчивых в разомкнутом состоянии: замкнутая система устойчива, если на интервале положительности ЛАЧХ разомкнутой системы сумма переходов ее ЛФЧХ линии -180° равна , где — число правых корней характеристического уравнения разомкнутой системы.
Оценка запасов устойчивости по ЛЧХ. Запас устойчивости по амплитуде равен отклонению ЛАЧХ от нуля на ближайших к частоте среза  частотах пересечения ЛФЧХ с линией минус 180°. Запас устойчивости по фазе равен отклонению ЛФЧХ на частоте среза от линии минус 180° к нулю.
частотах пересечения ЛФЧХ с линией минус 180°. Запас устойчивости по фазе равен отклонению ЛФЧХ на частоте среза от линии минус 180° к нулю.
Пример №31
Оценить устойчивость системы (рисунок 1.50) по Найквисту.
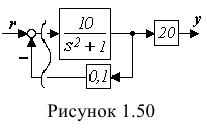
Решение:
Поскольку необходимо оценить устойчивость имеющейся системы, ее предварительно следует сделать разомкнутой — разорвать контур обратной связи по сумматору. Передаточная функция разомкнутой системы

Блок с коэффициентом усиления 20 стоит вне контура обратной связи и на устойчивость системы не влияет. В разомкнутом состоянии система находится на колебательной границе устойчивости, так как имеет корни  . Находим комплексный коэффициент передачи разомкнутой системы
. Находим комплексный коэффициент передачи разомкнутой системы  .
.
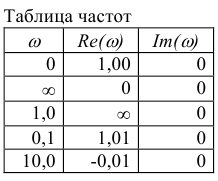
Определяем частоты пересечения годографа с осями координат: мнимая часть отсутствует, из уравнения  видно, что корни, т.е. частоты пересечения с мнимой осью, отсутствуют. Зато уравнение
видно, что корни, т.е. частоты пересечения с мнимой осью, отсутствуют. Зато уравнение  дает частоту разрыва характеристики
дает частоту разрыва характеристики  . В подобном случае обычно берут еще две частоты (произвольно) — немного меньше частоты разрыва и немного больше, например, возьмём 0,1 и 10.
. В подобном случае обычно берут еще две частоты (произвольно) — немного меньше частоты разрыва и немного больше, например, возьмём 0,1 и 10.
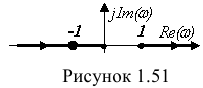
Замкнутая система также находится на колебательной границе устойчивости (рисунок 1.51), т.к. АФЧХ проходит через точку .
Пример №32
Оценить запасы устойчивости по АФЧХ после замыкания единичной ООС системы с

Решение:
Задача не требует построения АФЧХ. По критерию Гурвица следует, что в разомкнутом состоянии система устойчива, нулей нет, поэтому годограф Найквиста проходит два квадранта по часовой стрелке и не пересекает отрицательную действительную полуось. Таким образом, запас по амплитуде максимален  . Полюса системы действительные -1 и -2, следовательно, резонанс в системе отсутствует и амплитуда вектора
. Полюса системы действительные -1 и -2, следовательно, резонанс в системе отсутствует и амплитуда вектора  нигде не превышает величины
нигде не превышает величины  = 1/2, запас устойчивости по фазе равен = 180°.
= 1/2, запас устойчивости по фазе равен = 180°.
Качество непрерывных стационарных систем. Прямые оценки качества регулирования
Прямые оценки качества определяются по переходной характеристике, т.е. реакции системы на единичный скачок при нулевых начальных условиях (рисунок 1.55).
Время регулирования  измеряется от начала переходного процесса до момента, после которого характеристика не отклоняется от установившегося значения более, чем на величину допустимой ошибки
измеряется от начала переходного процесса до момента, после которого характеристика не отклоняется от установившегося значения более, чем на величину допустимой ошибки  (обычно 5 %, реже 2 % от установившегося значения). Следует указывать, при какой зоне получено время регулирования.
(обычно 5 %, реже 2 % от установившегося значения). Следует указывать, при какой зоне получено время регулирования.
Перерегулирование  — величина максимального относительного заброса переходной характеристики от начальной величины за линию установившегося значения (в относительных единицах или %)
— величина максимального относительного заброса переходной характеристики от начальной величины за линию установившегося значения (в относительных единицах или %)
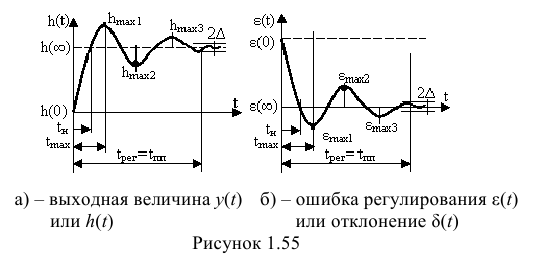
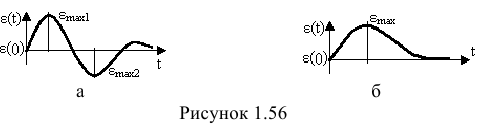
Если начальное и конечное значения характеристики равны нулю или одинаковы (и приняты условно за 0), возможны два способа оценки. При наличии разнополярных значений перерегулирование равно отношению величины второго экстремума к величине первого (рисунок 1.56, а), а если колебание одно (рисунок 1.56, б), то перерегулирование равно отношению величины максимального отклонения к величине входного воздействия (обычно это единица). Зону для оценки времени регулирования в первом случае определяют от значения первого максимума, во втором случае — от величины входного воздействия.
Время нарастания  определяется: для процессов с перерегулированием как время от начала процесса до момента пересечения кривой линии установившегося значения; для любых процессов как время между моментами достижения заданных уровней установившегося значения (например, 10 и 90 %). Поэтому при оценке времени нарастания следует указывать, каким способом оно получено.
определяется: для процессов с перерегулированием как время от начала процесса до момента пересечения кривой линии установившегося значения; для любых процессов как время между моментами достижения заданных уровней установившегося значения (например, 10 и 90 %). Поэтому при оценке времени нарастания следует указывать, каким способом оно получено.
Время достижения первого максимума  (подразумевается, что первый максимум кривой является и наибольшим из всех).
(подразумевается, что первый максимум кривой является и наибольшим из всех).
Коэффициент колебательности  — число забросов переходной характеристики через линию установившегося значения за время регулирования, рекомендуется не более одного-двух забросов.
— число забросов переходной характеристики через линию установившегося значения за время регулирования, рекомендуется не более одного-двух забросов.
Степень затухания (демпфирования) — величина относительного уменьшения

амплитуды максимальных забросов выходной величины за один период  удовлетворительной считают систему с
удовлетворительной считают систему с  .
.
Установившаяся ошибка  равна разнице между предписанным и действительным значениями выходной величины после окончания переходного процесса.
равна разнице между предписанным и действительным значениями выходной величины после окончания переходного процесса.
Пример №33
Оценить время регулирования и перерегулирование для системы с передаточной функцией  .
.
Решение:
Поскольку полюс  действительный, без мнимой части, колебаний не будет и перерегулирование
действительный, без мнимой части, колебаний не будет и перерегулирование  . Переходный процесс описывается зависимостью
. Переходный процесс описывается зависимостью  и заканчивается при достижении величины
и заканчивается при достижении величины  , т.е. когда выполняется условие
, т.е. когда выполняется условие  . Отсюда
. Отсюда

Пример №34
Определить величину перерегулирования и времени регулирования (рисунок 1.57)
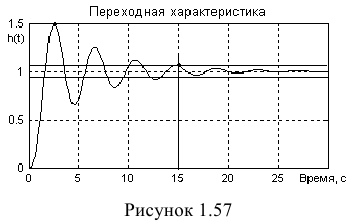
Решение:
Перерегулирование = (1,5 — 1,0)/1,0 = 0,5 или 50 %. Для определения времени регулирования проводим параллельно линии установившегося значения две прямые на уровне  . По точке последнего вхождения кривой в зону 2 получаем
. По точке последнего вхождения кривой в зону 2 получаем  = 15 с.
= 15 с.
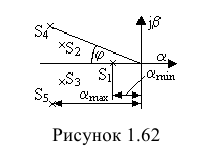
Корневые методы оценки качества регулирования Доминирующими называются левые полюса системы, ближайшие к мнимой оси. Степень устойчивости  (или
(или  ) равна модулю их действительной части (рисунок 1.62). Для оценки времени регулирования находят сначала степень устойчивости системы, откуда при ошибке
) равна модулю их действительной части (рисунок 1.62). Для оценки времени регулирования находят сначала степень устойчивости системы, откуда при ошибке

При заданной зоне ошибки 2 % вместо коэффициента 3 берут приблизительно 4.
Найдя степень колебательности системы

определяют значение перерегулирования

Для расчета выбирают комплексный корень (полюс), у которого отношение мнимой части к действительной максимально. При единственной паре комплексных корней необходимость выбора отпадает. При нескольких парах комплексных корней максимальное значение у того корня, который первым встречается лучу, проведенному из начала координат по положительной мнимой полуоси и поворачиваемому против часовой стрелки.
выбирают комплексный корень (полюс), у которого отношение мнимой части к действительной максимально. При единственной паре комплексных корней необходимость выбора отпадает. При нескольких парах комплексных корней максимальное значение у того корня, который первым встречается лучу, проведенному из начала координат по положительной мнимой полуоси и поворачиваемому против часовой стрелки.
Показатели качества определяют только для устойчивых систем. Если система имеет нуль, равный полюсу, то они взаимно компенсируются и данная составляющая не учитывается (выпадает из переходного процесса).
Пример №35
Оценить показатели качества регулирования системы, имеющей нуль -0,125, полюса  и коэффициент передачи 1,2.
и коэффициент передачи 1,2.
Решение:
Коэффициент передачи на относительные показатели не влияет. Нуль -0,125, равный полюсу, взаимно с ним компенсируется. Следовательно, доминирующими являются комплексно-сопряженные полюса  откуда
откуда  , степень колебательности системы
, степень колебательности системы

и перерегулирование

или 45,6 %.
Пример №36
Оценить перерегулирование и время регулирования системы

с законом управления  .
.
Решение:
Подставляя значение и в соответствии с законом регулирования, получим дифференциальное уравнение

Нули отсутствуют, из характеристического уравнения

находим полюса

Отсюда

а перерегулирование  или 4,3 %.
или 4,3 %.
Частотные методы оценки качества регулирования Особые частоты:  — граница интервала частот положительности ВЧХ,
— граница интервала частот положительности ВЧХ,  — частота собственных колебаний,
— частота собственных колебаний,  — граница интервала существенных частот, вне которого текущее значение функции уже не превышает
— граница интервала существенных частот, вне которого текущее значение функции уже не превышает  .
.
Общие принципы оценки качества по вещественной частотной характеристике  :
:
а) если ВЧХ монотонно убывает, то перерегулирование = 0;
б) если ВЧХ является положительной невозрастающей функцией, то перерегулирование < 18 %;
в) если ВЧХ имеет подъем от

г) если ВЧХ имеет отрицательный минимум со значением более 0,1  , то с его учетом
, то с его учетом

д) если ВЧХ терпит разрыв при  , система совершает незатухающие колебания,
, система совершает незатухающие колебания,  и показатели качества не определяются.
и показатели качества не определяются.
При оценке качества регулирования по АЧХ обычно вычисляют значение частотного показателя колебательности, равное отношению максимума характеристики к ее начальному значению  . При
. При  = 1 переходная характеристика системы не колебательна, при
= 1 переходная характеристика системы не колебательна, при  система находится на границе устойчивости, наблюдаются незатухающие колебания с частотой
система находится на границе устойчивости, наблюдаются незатухающие колебания с частотой  . Оптимальными считаются значения = 1,1..1,5, которым соответствует перерегулирование 10-30 % и запас по фазе 30-50°.
. Оптимальными считаются значения = 1,1..1,5, которым соответствует перерегулирование 10-30 % и запас по фазе 30-50°.
Пример №37
Оценить значение частотного показателя колебательности системы по её АЧХ (рисунок 1.68).
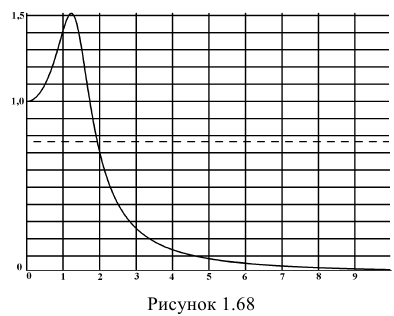
Решение:
Максимальное значение АЧХ равно 1,51, следовательно, показатель колебательности = 1,51/1,0 = 1,51, что ещё удовлетворяет минимальному запасу по фазе 30° и перерегулированию 30 %.
Пример №38
Найти значение перерегулирования и времени регулирования системы по заданной АФЧХ (рисунок 1.69)
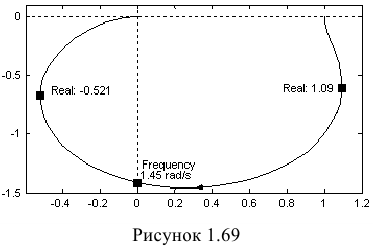
Решение:
Частота  = 1,45 рад/с, положительный максимум ВЧХ равен 1,09 при начальном значении = 1,0, отрицательный минимум 0,521. Отсюда получаем перерегулирование
= 1,45 рад/с, положительный максимум ВЧХ равен 1,09 при начальном значении = 1,0, отрицательный минимум 0,521. Отсюда получаем перерегулирование

и время регулирования не более

Интегральные оценки качества переходных процессов Интегральные показатели качества регулирования дают совокупную оценку быстродействия и колебательности без вычисления их значений. Они характеризуют отклонение реального переходного процесса от заданного идеального.
Интегральная линейная оценка (ИЛО) определяется площадью отклонения реального процесса от идеального ступенчатого. Для обеспечения требуемых динамических свойств САУ необходимо выразить величину  через коэффициенты передаточной функции системы
через коэффициенты передаточной функции системы
где  — значение передаточной функции в установившемся режиме (при
— значение передаточной функции в установившемся режиме (при  ), а затем найти оптимальные значения варьируемых параметров, соответствующих минимуму .
), а затем найти оптимальные значения варьируемых параметров, соответствующих минимуму .
Пример №39
Для системы с передаточной функцией
линейная интегральная оценка
зависит от соотношения постоянных времени  и
и  . Минимум оценки достигается при их равенстве.
. Минимум оценки достигается при их равенстве.
Точность в установившемся режиме
Установившаяся ошибка характеризует точность системы в статическом режиме и равна отклонению действительного значения регулируемой величины от заданного. Система с нулевой установившейся ошибкой  называется астатической, а при
называется астатической, а при  и система и ошибка называются статическими.
и система и ошибка называются статическими.
Ошибка зависит от вида входного воздействия, места его приложения и степени астатизма  (числа нулевых полюсов) разомкнутой системы. По умолчанию подразумевают вход задания
(числа нулевых полюсов) разомкнутой системы. По умолчанию подразумевают вход задания  и вид воздействия скачок
и вид воздействия скачок  при нулевых начальных условиях, в ином случае условия получения ошибки должны оговариваться специально.
при нулевых начальных условиях, в ином случае условия получения ошибки должны оговариваться специально.
Передаточная функция ошибки воспроизведения задания определяется по ПФ разомкнутой системы как  по передаточной функции замкнутой системы как
по передаточной функции замкнутой системы как  .
.
Относительная величина установившейся ошибки называется коэффициентом статизма (статизмом) системы по соответствующему каналу:
Здесь  — коэффициент усиления объекта регулирования. Ошибку регулирования и статизм можно уменьшить, увеличивая общий коэффициент усиления системы
— коэффициент усиления объекта регулирования. Ошибку регулирования и статизм можно уменьшить, увеличивая общий коэффициент усиления системы  а по заданной величине статизма (относительной статической ошибки) системы можно выбрать требуемый коэффициент усиления.
а по заданной величине статизма (относительной статической ошибки) системы можно выбрать требуемый коэффициент усиления.
Интеграторы с ПФ вида  добавляемые вне цепи прямой связи сигнала ошибки, увеличивая порядок астатизма разомкнутой системы, позволяют полностью устранить ошибки статическую, по скорости, по ускорению.
добавляемые вне цепи прямой связи сигнала ошибки, увеличивая порядок астатизма разомкнутой системы, позволяют полностью устранить ошибки статическую, по скорости, по ускорению.
Установившийся динамический режим имеет место при возмущенном движении системы с момента затухания свободной составляющей переходного процесса.
Если входное воздействие аппроксимируется полиномом от  т.е. разлагается в степенной ряд
т.е. разлагается в степенной ряд

для расчета вынужденной составляющей ошибки используют метод коэффициентов ошибок. По этому методу передаточную функцию ошибки представляют в виде аналогичного ряда

где  — коэффициент статической (позиционной) ошибки от
— коэффициент статической (позиционной) ошибки от  ;
;  — коэффициент ошибки по скорости от линейной функции
— коэффициент ошибки по скорости от линейной функции  ,
,  — коэффициент ошибки по ускорению от функции
— коэффициент ошибки по ускорению от функции  . Сравнивая две формы записи передаточной функции ошибки, находят значения коэффициентов ошибок (в обоих случаях полиномы нужно начать со свободного члена, а дробь пронормировать по свободному члену знаменателя)
. Сравнивая две формы записи передаточной функции ошибки, находят значения коэффициентов ошибок (в обоих случаях полиномы нужно начать со свободного члена, а дробь пронормировать по свободному члену знаменателя)
Обычно вычисляют не более трех первых коэффициентов ошибок. Коэффициенты передачи составляющих входного воздействия вычисляются по ПФ разомкнутой системы и называются:
Пример №40
Пусть допустимая статическая ошибка воспроизведения скачка задания не должна превышать значения  или
или  . Для этого необходимо иметь полный коэффициент усиления системы не менее
. Для этого необходимо иметь полный коэффициент усиления системы не менее
Пример №41
Определить полную статическую ошибку для системы (рисунок 1.72), полагая, что

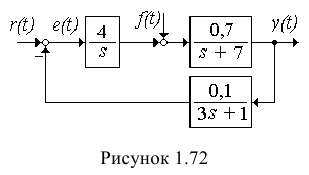
Выражение для суммарной ошибки в операторной форме

Поскольку изображения входных сигналов равны  и
и  , полная статическая ошибка будет равна
, полная статическая ошибка будет равна  . Благодаря интегратору
. Благодаря интегратору  , значение ошибки от величины задания
, значение ошибки от величины задания  и возмущения
и возмущения  не зависит. Система является астатической относительно обоих воздействий.
не зависит. Система является астатической относительно обоих воздействий.
Пример №42
Определить три первых коэффициента ошибки, вынужденную составляющую ошибки от воздействия

и добротность по скорости для системы, имеющей в разомкнутом состоянии ПФ
Решение:
Находим передаточную функцию по каналу ошибки

Используя нормированную по  передаточную функцию, найдем три первых коэффициента ошибок
передаточную функцию, найдем три первых коэффициента ошибок

В общем виде вынужденная составляющая ошибки воспроизведения задающего воздействия равна

Для задающего воздействия

находим производные  и установившуюся динамическую ошибку в любой момент времени
и установившуюся динамическую ошибку в любой момент времени
Добротность по скорости вычисляем по ПФ разомкнутой системы

Многомерные системы регулирования. Переход к пространству состояний
При описании системы переменными состояния дифференциальному уравнению  -го порядка
-го порядка

и соответствует система дифференциальных уравнений первого порядка в нормальной форме Коши, разрешенных относительно производной.
Для перехода от ОДУ по методу фазовых переменных за первую переменную состояния принимают выходную величину, за остальные переменные состояния принимают -1 производную выходной величины. Обязательно сначала нужно нормировать дифференциальное уравнение, т.е. делить обе части уравнения на коэффициент  при старшей производной выходной функции (на старший коэффициент многочлена знаменателя передаточной функции).
при старшей производной выходной функции (на старший коэффициент многочлена знаменателя передаточной функции).
Если порядок  многочлена числителя ПФ меньше порядка многочлена знаменателя, общий коэффициент ПФ (коэффициент перед правой частью ОДУ) записывается в уравнение для старшей переменной состояния, а коэффициенты многочлена числителя — в обратном порядке в уравнение выхода.
многочлена числителя ПФ меньше порядка многочлена знаменателя, общий коэффициент ПФ (коэффициент перед правой частью ОДУ) записывается в уравнение для старшей переменной состояния, а коэффициенты многочлена числителя — в обратном порядке в уравнение выхода.
По системе уравнений составляется матрица состояния  (из коэффициентов при
(из коэффициентов при  ) и матрица входа
) и матрица входа  (из коэффициентов при входном воздействии
(из коэффициентов при входном воздействии  ), по уравнению выхода составляется матрица выхода
), по уравнению выхода составляется матрица выхода  (из коэффициентов при )
(из коэффициентов при )
Сопровождающая матрица (матрица Фробениуса) может быть записана прямо по ОДУ (по характеристическому полиному системы)
По уравнениям состояния или матрицам  указанного вида легко восстановить ПФ или ОДУ, учитывая, что в последней строке сопровождающей матрицы записаны с конца, с обратным знаком коэффициенты нормированного характеристического многочлена, а в матрице
указанного вида легко восстановить ПФ или ОДУ, учитывая, что в последней строке сопровождающей матрицы записаны с конца, с обратным знаком коэффициенты нормированного характеристического многочлена, а в матрице  — коэффициенты многочлена числителя передаточной функции в обратном порядке.
— коэффициенты многочлена числителя передаточной функции в обратном порядке.
Пример №43
Дифференциальное уравнение объекта управления

Выбираем переменные состояния

Решение:
В нормировании нет необходимости. Записываем для каждой из переменных состояния дифференциальное уравнение первого порядка, добавляем общее алгебраическое уравнение выхода
Пример №44
Пусть модель объекта управления имеет вид

тогда после нормирования (деления на 2), считая общий коэффициент перед правой частью уравнения равным единице, получим описание системы в пространстве состояний матрицами

Канонические представления
Стандартные формы описания систем в пространстве состояний с сопровождающей матрицей называются каноническими. Это каноническая управляемая форма (с упрощенной матрицей  ) и каноническая наблюдаемая форма (с упрощенной матрицей
) и каноническая наблюдаемая форма (с упрощенной матрицей  ).
).
При  , т.е. одинаковых степенях полиномов числителя и знаменателя ПФ, появляется ненулевая матрица обхода
, т.е. одинаковых степенях полиномов числителя и знаменателя ПФ, появляется ненулевая матрица обхода  , которая содержит коэффициенты при входных воздействиях в уравнении выхода. Если матрица нулевая, её можно не писать.
, которая содержит коэффициенты при входных воздействиях в уравнении выхода. Если матрица нулевая, её можно не писать.
Пусть

тогда вычисления для перехода к канонической управляемой форме имеют вид

При  в матрицу с просто записываются коэффициенты числителя передаточной функции, начиная со свободного члена.
в матрицу с просто записываются коэффициенты числителя передаточной функции, начиная со свободного члена.
Другой способ перехода к канонической управляемой форме: нужно разделить числитель ПФ на ее знаменатель, получившееся отдельно стоящее слагаемое (частное) поместить в матрицу , а коэффициенты числителя полученной рациональной дроби (остатка) записать в матрицу с как обычно, начиная со свободного члена.
Порядок расчета элементов матриц и для перехода к канонической наблюдаемой форме (в этом случае элементы матрицы необходимо вычислять даже при нулевой матрице , т.е. при  ).
).
Пусть

тогда
К стандартным формам относится также описание с диагональной (модальной) матрицей , когда по главной диагонали матрицы записывают её собственные значения (корни характеристического уравнения). К описанию с диагональной матрицей переходят путем разложения исходного выражения на простые дроби.
Если матрица не сопровождающая, а произвольного вида, ее характеристический многочлен нужно вычислять как определитель  , где
, где  — комплексная переменная Лапласа, 1 — единичная матрица.
— комплексная переменная Лапласа, 1 — единичная матрица.
Корни характеристического уравнения =0 являются собственными значениями матрицы . Матрицы подобны, если имеют одинаковые собственные значения (характеристические многочлены и их корни).
Многомерная система устойчива, если все собственные значения матрицы состояний имеют отрицательную действительную часть, иначе — все корни характеристического полинома являются левыми. Вычислив характеристическое уравнение системы , можно оценить ее устойчивость любым из известных способов.
Пример №45
Передаточная функция объекта
Каноническое управляемое представление (нормирование по  не требуется, матрица имеет стандартный вид, всегда одинаковый)
не требуется, матрица имеет стандартный вид, всегда одинаковый)
Пример №46
По уравнению

составим каноническую наблюдаемую форму. Нормирование по старшему коэффициенту знаменателя при  не требуется, так как он уже равен единице, многочлен числителя ПФ дополняем коэффициентами до той же степени, что и многочлен знаменателя
не требуется, так как он уже равен единице, многочлен числителя ПФ дополняем коэффициентами до той же степени, что и многочлен знаменателя

матрица нулевая, поскольку , и окончательно (матрица с имеет стандартный вид, всегда одинаковый)
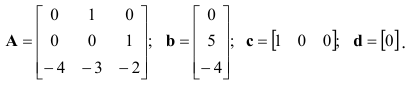
Пример №47
Перейти к переменным состояния разложением на простые дроби заданной передаточной функции
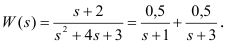
Решение:
Коэффициенты на главной диагонали матрицы равны её собственным значениям (полюсам системы)  ; структурная схема соответствует рисунку 2.1. Матрицы и включены последовательно, поэтому, если вычеты 0,5 и 0,5 вписаны в матрицу (как показано), то в матрицу записываются единицы, и наоборот.
; структурная схема соответствует рисунку 2.1. Матрицы и включены последовательно, поэтому, если вычеты 0,5 и 0,5 вписаны в матрицу (как показано), то в матрицу записываются единицы, и наоборот.
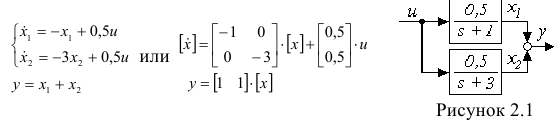
Пример №48
Оценить устойчивость системы, проверить подобие матрицы и матрицы
Система

матрица
Решение:
Характеристическая матрица

Характеристический многочлен (определитель характеристической матрицы)

По критерию Гурвица система устойчива, т.к. все коэффициенты характеристического многочлена положительны.
Характеристический многочлен матрицы
равен

Матрицы  и
и  подобны, поскольку равны их характеристические многочлены.
подобны, поскольку равны их характеристические многочлены.
Описание по структурной схеме
На структурной схеме переменные состояния могут быть назначены разным образом, поэтому и описания системы в пространстве состояний будут отличаться. Все матрицы имеют нестандартный вид. Однако переменная всегда назначается на выходе блока с  в знаменателе, а ОДУ первого порядка для каждого такого блока записывают в зависимости от вида знаменателя:
в знаменателе, а ОДУ первого порядка для каждого такого блока записывают в зависимости от вида знаменателя:
а) звено с нулевым корнем в знаменателе (рисунок 2.3, а)

б) звено с действительным корнем, две формы (рисунок 2.3, б)

Правая часть после нормирования равна произведению входа на числитель минус произведение выхода на коэффициент знаменателя.
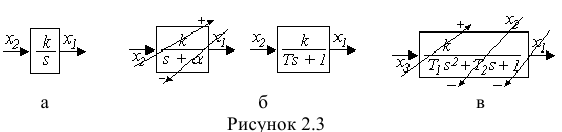
Звено с комплексными сопряженными корнями (рисунок 2.3, в), не разлагается на два простых, поэтому вводят условно переменную состояния с промежуточным индексом и составляют два уравнения

Эта запись соответствует переходу от дифференциального уравнения к канонической форме наблюдаемости с нормированием по старшему коэффициенту знаменателя
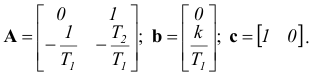
Любой блок порядка  >1 может быть описан с использованием канонической наблюдаемой формы без его разложения на простые звенья. В особенности это важно, если блок имеет нули, т.е. порядок многочлена числителя его передаточной функции не ниже единицы.
>1 может быть описан с использованием канонической наблюдаемой формы без его разложения на простые звенья. В особенности это важно, если блок имеет нули, т.е. порядок многочлена числителя его передаточной функции не ниже единицы.

Умножая матрицу на вектор  и вектор
и вектор  на вход
на вход  , получаем систему уравнений, которую затем совмещаем с уравнениями оставшейся части структурной схемы.
, получаем систему уравнений, которую затем совмещаем с уравнениями оставшейся части структурной схемы.
Поскольку в пространстве состояний не могут быть отдельно описаны дифференцирующие и форсирующие звенья с  , то, получив в правой части уравнения дополнительную производную с индексом, меньшим текущего номера уравнения, ее пробуют выразить через значение, полученное ранее, в предыдущих дифференциальных уравнениях. Обычно это имеет место при обратных связях через .
, то, получив в правой части уравнения дополнительную производную с индексом, меньшим текущего номера уравнения, ее пробуют выразить через значение, полученное ранее, в предыдущих дифференциальных уравнениях. Обычно это имеет место при обратных связях через .
Пример №49
Описать систему (рисунок 2.4, а)
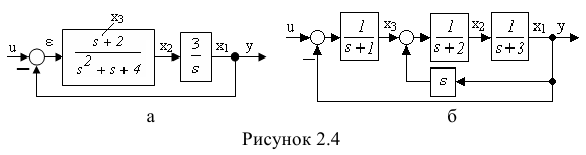
Решение:
Сначала рассматриваем сложный блок с переменной s в числителе, учитывая, что вектор с для него составлен единственной единицей и в вычислениях не нуждается, а переменная состояния на выходе блока имеет индекс 2:

Затем описываем всю систему, включая в нее этот блок:
и окончательно
Пример №50
Составляя уравнения состояния для случая, когда в цепи обратной связи есть звено дифференцирования с (рисунок 2.4, б) учитываем, что умножение на s в операторной области соответствует взятию производной во временной области.
Решение:
Поскольку в правой части уравнений производных быть не должно, вместо производной подставляется ее значение, вычисленное ранее. Окончательно
Синтез структурной схемы
Независимо от реальной конструкции, система в пространстве состояний может быть представлена набором интеграторов (звеньев  , осуществляющих операцию интегрирования входной величины по времени), сумматоров и блоков, воспроизводящих коэффициенты усиления в собственных и перекрестных связях.
, осуществляющих операцию интегрирования входной величины по времени), сумматоров и блоков, воспроизводящих коэффициенты усиления в собственных и перекрестных связях.
Пример №51
Перейдем от матриц 
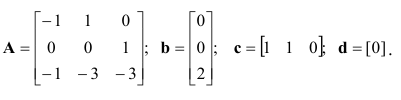
к структурной схеме (рисунок 2.11), для чего выбираем число звеньев (равно порядку матрицы ), определяем корни знаменателей ПФ по диагональным элементам матрицы ( = -1 у блока с переменной  на выходе и = -3 у блока с переменной ), находим коэффициенты прямых связей — числители ПФ блоков между
на выходе и = -3 у блока с переменной ), находим коэффициенты прямых связей — числители ПФ блоков между  и , между и (оба числителя равны 1). В схеме имеются две отрицательные обратные связи: единичная ООС от к и с коэффициентом 3 от к . На входе системы находится блок с коэффициентом 2, выход
и , между и (оба числителя равны 1). В схеме имеются две отрицательные обратные связи: единичная ООС от к и с коэффициентом 3 от к . На входе системы находится блок с коэффициентом 2, выход  связан с системой через коэффициенты 1 матрицы
связан с системой через коэффициенты 1 матрицы  .
.
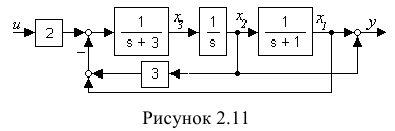
Пример №52
Построить структурную схему объекта, заданного системой дифференциальных уравнений
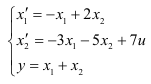
Решение:
Порядок объекта равен двум, используем два интегратора с сумматором на входе каждого. Назначаем переменные на выходах интеграторов, двигаясь от выхода схемы ко входу, значения всех производных формируются на входе интеграторов. Проводим связи на входы сумматоров в соответствии с видом уравнений. Например, производная  образуется на входе последнего интегратора суммированием выходной переменной (с минусом) и переменной , взятой с коэффициентом 2 (смотри первую строку системы дифференциальных уравнений). Сумматор на выходе необходим для образования выходной величины из переменных состояния, взятых с соответствующими коэффициентами
образуется на входе последнего интегратора суммированием выходной переменной (с минусом) и переменной , взятой с коэффициентом 2 (смотри первую строку системы дифференциальных уравнений). Сумматор на выходе необходим для образования выходной величины из переменных состояния, взятых с соответствующими коэффициентами  (рисунок 2.12).
(рисунок 2.12).
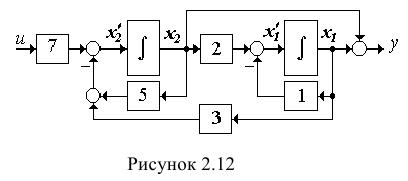
Пример №53
Построить структурную схему объекта по дифференциальному уравнению

Решение:
Поскольку порядок системы равен трем, используем три интегратора , включив их последовательно и установив сумматор на входе первого интегратора слева. К инвертирующему входу этого сумматора подключаем через согласующие сумматоры блоки с коэффициентами (по порядку):  — с выхода первого интегратора,
— с выхода первого интегратора,  — с выхода второго интегратора,
— с выхода второго интегратора,  — с выхода третьего интегратора.
— с выхода третьего интегратора.
Если в правой части дифференциального уравнения нет производных, блок с коэффициентом  помещаем на входе главного сумматора (рисунок 2.13), в ином случае необходим еще один сумматор на выходе схемы, к которому через блоки с коэффициентами
помещаем на входе главного сумматора (рисунок 2.13), в ином случае необходим еще один сумматор на выходе схемы, к которому через блоки с коэффициентами  подключают выходы интеграторов.
подключают выходы интеграторов.
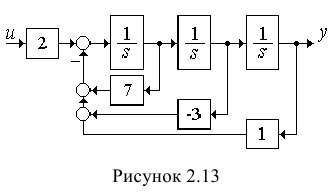
Основные матричные функции
 — характеристическая матрица, аналог характеристического полинома одномерной системы
— характеристическая матрица, аналог характеристического полинома одномерной системы  .
.
 — системная матрица (резольвента), называемая также передаточной матрицей или матрицей передаточных функций (МПФ) для переменных состояния, аналог системной функции
— системная матрица (резольвента), называемая также передаточной матрицей или матрицей передаточных функций (МПФ) для переменных состояния, аналог системной функции  .
.
 — реальная МПФ для назначенных входов и выходов (передаточная матрица выходов), совпадает по виду с
— реальная МПФ для назначенных входов и выходов (передаточная матрица выходов), совпадает по виду с  только в частном случае.
только в частном случае.
Пример №54
Система задана в пространстве состояний матрицами
Характеристическая матрица
Характеристический полином (определитель характеристической матрицы)

Присоединенная матрица

Решение:
Алгоритм вычисления присоединенной матрицы: каждый элемент исходной матрицы  заменяют его алгебраическим дополнением и полученная матрица транспонируется (приложение В). Резольвента
заменяют его алгебраическим дополнением и полученная матрица транспонируется (приложение В). Резольвента
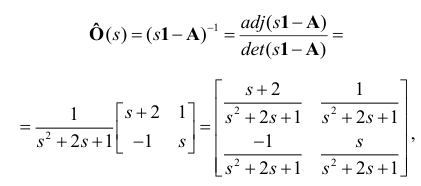
матрица передаточных функций выходов
Решение уравнения движения
Решение дифференциального уравнения для переменных состояния  , т.е. изменение вектора состояния при известном векторе управления и начальных условиях (внутри системы), в общем виде
, т.е. изменение вектора состояния при известном векторе управления и начальных условиях (внутри системы), в общем виде

Реакция на выходе системы вычисляется с учетом матрицы


Если система задана в наблюдаемой форме с упрощенной матрицей с, вместо вектора начальных значений переменных состояния  может непосредственно использоваться вектор
может непосредственно использоваться вектор  начальных значений рассогласования, скорости, ускорения и т. п. на выходе системы. В ином случае необходимо преобразование в с учетом коэффициентов матрицы .
начальных значений рассогласования, скорости, ускорения и т. п. на выходе системы. В ином случае необходимо преобразование в с учетом коэффициентов матрицы .
Матрицы, элементами которых являются весовые  или переходные
или переходные  функции объекта, называются соответственно весовой (импульсной)
функции объекта, называются соответственно весовой (импульсной)  и переходной
и переходной  матрицами. Их изображения определяют обычным способом.
матрицами. Их изображения определяют обычным способом.

Пример №55
Найти при  и начальных условиях
и начальных условиях 
 уравнения движения системы
уравнения движения системы
Решение:
Система задана в наблюдаемой форме с матрицей = [1 0], поэтому вектор начальных значений переменных формируем по выходу
Характеристическая матрица

Характеристический полином (определитель характеристической матрицы)

Резольвента
где присоединенная матрица
Заменяем по таблице соответствия изображения на оригиналы
Пример №56
Найти изображение реакции на  системы
системы

Решение:
Изображение входного воздействия
Вычисление фундаментальной матрицы
Поскольку

то фундаментальную матрицу  определяют как матричную экспоненту от
определяют как матричную экспоненту от  тремя способами:
тремя способами:
а) разложением в бесконечный  или конечный ряд
или конечный ряд

где  — порядок системы.
— порядок системы.
Точность расчета снижается из-за конечного числа членов ряда. Способ полезен в случаях, когда невозможно найти корни характеристического уравнения системы, либо производится расчет для конкретного момента времени  .
.
б) по формуле Сильвестра
где  — собственные значения матрицы
— собственные значения матрицы  (корни характеристического уравнения системы), или в развернутом виде
(корни характеристического уравнения системы), или в развернутом виде

Здесь
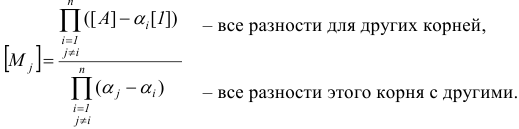
Особенности метода — коэффициенты сразу получаются в матричном виде, но обязательно нужно знать корни характеристического уравнения. Приведенная формула пригодна для простых действительных корней характеристического уравнения, для кратных корней используется более сложная формула.
в) Наконец, вычисляется и как обратное преобразование Лапласа от системной матрицы  или
или  .
.
Здесь также нужно обязательно знать корни, требуется многократное поэлементное преобразование, но зато способ пригоден для любых корней (комплексных, кратных, простых).
Пример №57
Определим матричную экспоненту для системы с  . Поскольку уже при
. Поскольку уже при  получена нулевая матрица
получена нулевая матрица
расчет далее можно не продолжать и результат записывается в виде

Пример №58
Определить методом Сильвестра для системы
Решение:
Вычисляем характеристический полином, находим его корни

Вычисляем матрицы коэффициентов при собственных модах системы
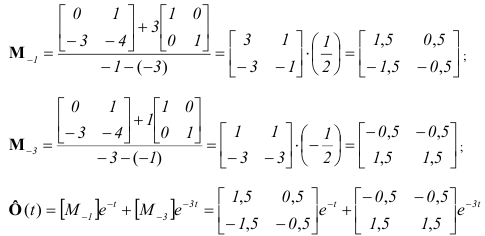
Пример №59
Определить с помощью обратного преобразования Лапласа фундаментальную матрицу системы
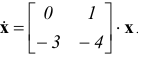
Решение:
Находим корни характеристического полинома и адъюнкту -1
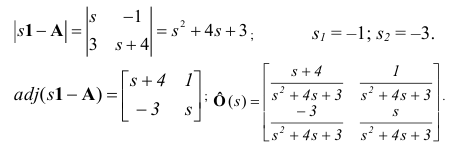
Общий вид разложения на простые дроби
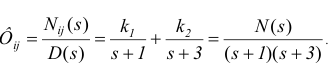
Находим коэффициенты числителей простых дробей:
откуда получаем вид системной и фундаментальной матриц
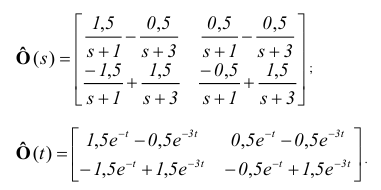
Найдем, например, реакцию на начальные условия 
 данной системы по известной , если
данной системы по известной , если  .
.

Управляемость и наблюдаемость систем
Для управляемости системы необходимо и достаточно, чтобы матрица управляемости вида

имела ранг, равный . При управляемости системы говорят также, что пара  управляема.
управляема.
Ранг матрицы  равен порядку её наибольшего ненулевого минора. Матрица
равен порядку её наибольшего ненулевого минора. Матрица  составляется присоединением справа к матрице
составляется присоединением справа к матрице  произведения матриц
произведения матриц  , затем произведения
, затем произведения  и т.д. Размерность матрицы равна
и т.д. Размерность матрицы равна  , где
, где  — число входов. Если ранг матрицы (обозначим его
— число входов. Если ранг матрицы (обозначим его  ) не равен единице, то вычисление матрицы можно закончить досрочно по формуле
) не равен единице, то вычисление матрицы можно закончить досрочно по формуле

Система полностью управляема при  , полностью неуправляема при
, полностью неуправляема при  = 0, частично управляема при
= 0, частично управляема при  , порядок управляемости равен .
, порядок управляемости равен .
Для наблюдаемости системы необходимо и достаточно, чтобы матрица наблюдаемости

имела ранг, равный порядку системы . Символ  означает транспонирование или перевод вектора-строки в вектор-столбец. Говорят иначе, что пара
означает транспонирование или перевод вектора-строки в вектор-столбец. Говорят иначе, что пара  наблюдаема.
наблюдаема.
Система полностью наблюдаема при  , полностью не-наблюдаема при
, полностью не-наблюдаема при  = 0, частично наблюдаема при
= 0, частично наблюдаема при  , порядок наблюдаемости равен .
, порядок наблюдаемости равен .
Если ранг матрицы  (обозначим его
(обозначим его  ) больше единицы, то число вычислений можно сократить, пользуясь формулой
) больше единицы, то число вычислений можно сократить, пользуясь формулой

Существует и иная форма составления матрицы наблюдаемости — по вертикали без транспонирования

Если сокращены одинаковые нули и полюса, передаточная функция  и матрица передаточных функций
и матрица передаточных функций

описывают только управляемую и наблюдаемую часть системы. Наличие сокращаемых пар нуль-полюс приводит к неуправляемости (ненаблюдаемости) системы. При диагональной матрице  уже можно говорить о неполной управляемости или наблюдаемости системы, если соответственно матрица
уже можно говорить о неполной управляемости или наблюдаемости системы, если соответственно матрица  или
или  содержит нулевые элементы.
содержит нулевые элементы.
Пример №60
Оценить управляемость системы (достаточно иметь пару и ).
Система
Решение:
Находим
Определитель матрицы управляемости
следовательно, ранг матрицы равен двум, что равно порядку системы  , система полностью управляема.
, система полностью управляема.
Задачу можно было не решать: числитель ПФ содержит только 1 (это видно из матрицы ), следовательно, сокращаемые пары нуль-полюс отсутствуют и система полностью управляема.
Система
Пример №61
Оценить управляемость системы.
Матрица диагональная (в каждой строке одна переменная с возрастающим индексом). Уже ясно, что система неуправляема по  (по полюсу +1), поскольку в первом уравнении нет
(по полюсу +1), поскольку в первом уравнении нет  . Проверим вывод.
. Проверим вывод.
то

Система частично управляема, порядок управляемости равен двум.
Пример №62
Оценить наблюдаемость системы
С учетом того, что  делаем вывод, что = 1 — система частично наблюдаема, порядок наблюдаемости равен 1.
делаем вывод, что = 1 — система частично наблюдаема, порядок наблюдаемости равен 1.
Пример №63
Проверить управляемость системы
Передаточная функция

содержит сокращаемую пару (диполь) нуль -1/полюс -1, что ведет либо к неуправляемости, либо к ненаблюдаемости системы. От чего это будет зависеть? Составим описание системы в канонической управляемой форме и проверим управляемость

Система в таком представлении полностью управляема (но не вполне наблюдаема). Составим описание системы в канонической наблюдаемой форме и снова проверим управляемость

А теперь система управляема частично. Таким образом, если в ПФ системы обнаруживается сокращаемая пара, неуправляемость или ненаблюдаемость зависит от того, какое представление выбирается для перехода в пространство состояний. Если же в ПФ сокращаемые пары отсутствуют, система полностью управляема и наблюдаема.
Наблюдатели состояния
Если не все переменные состояния объекта регулирования измеряются, либо имеют место существенные искажения (помехи), используют специальное оценивающее устройство — наблюдатель.
Наблюдатель в виде параллельного фильтра представляет собой модель объекта регулирования на интеграторах в каноническом управляемом представлении. Его вход подключается параллельно входу объекта регулирования, а с выходов интеграторов снимают идеальные значения переменных состояния объекта (оценки), которые обозначают значком «каре» А над символом переменной. Разница значений выходов объекта и наблюдателя называется невязкой (обозначается значком «тильда» ~ над символом сигнала), при совпадении модели с оригиналом невязка стремится к нулю.
Если объект управления неустойчив, либо требуется ускорить переходный процесс в наблюдателе, наблюдатель строят в виде фильтра Калмана. В нём сигнал невязки через компенсирующее звено или корректирующие обратные связи подается на вход наблюдателя вместе с обычным входным сигналом, и, если невязка не равна нулю, переходный процесс принудительно демпфируется.
Пример №64
Построить наблюдатель в виде параллельного фильтра к объекту с передаточной функцией

Решение:
Модель объекта (описание наблюдателя) соответствует канонической форме управляемости

Этому описанию отвечает структурная схема (рисунок 2.22)
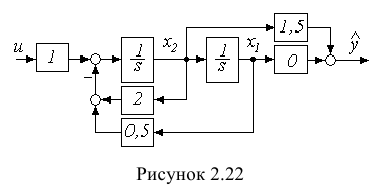
Пример №65
Построим наблюдатель в виде фильтра Калмана для объекта, заданного системой дифференциальных уравнений
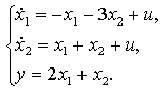
обеспечив показатели качества переходного процесса ошибки наблюдателя

Решение:
По матрицам коэффициентов объекта регулирования определяем его передаточную функцию (объект неустойчив)
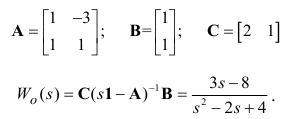
В фильтре Калмана второго порядка с дифференциальным уравнением

компенсирующая добавка образуется обратными связями с коэффициентами  (рисунок 2.23).
(рисунок 2.23).
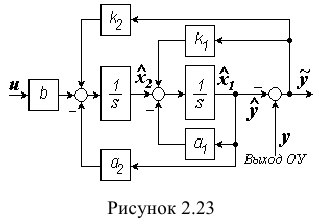
В соответствии с матрицей
характеристический полином наблюдателя имеет вид

или

Исходя из требований к качеству переходного процесса наблюдателя модуль действительной части  корней его характеристического уравнения при
корней его характеристического уравнения при  должен быть не менее, чем
должен быть не менее, чем  , тогда мнимая часть равна
, тогда мнимая часть равна

По двум выбранным корням  определяем вид желаемого устойчивого характеристического полинома
определяем вид желаемого устойчивого характеристического полинома

Из равенства
находим неизвестные коэффициенты корректирующих обратных связей

Пример №66
Рассчитать параметры наблюдателя в виде фильтра Калмана (рисунок 2.24) с компенсирующим звеном, имеющим передаточную функцию

при тех же требованиях к качеству переходного процесса наблюдателя и параметрах ПФ модели объекта регулирования  .
.
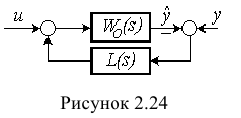
Решение:
Передаточная функция модели объекта регулирования равна

а характеристическое уравнение наблюдателя имеет вид

откуда, приравняв числитель нулю и нормируя, получаем

Желаемый характеристический полином третьего порядка формируем из корней с одинаковой действительной частью  и -3, он равен
и -3, он равен

Приравнивая  находим неизвестные коэффициенты
находим неизвестные коэффициенты 
Проектирование модального регулятора
Модальным называется регулятор, параметры которого выбраны по желаемому характеристическому многочлену замкнутой системы управления. Полагаем, что все переменные состояния объекта управления доступны для измерения, и рассмотрим случай, когда используется П-регулятор. Модель объекта управления
Закон управления для объекта второго порядка имеет вид

где  — коэффициент усиления П-регулятора,
— коэффициент усиления П-регулятора,  — задание,
— задание,  — коэффициенты обратных связей регулятора по переменным состояния.
— коэффициенты обратных связей регулятора по переменным состояния.
Подставив значение  в уравнение состояния, получим систему уравнений, которая описывает замкнутую систему управления
в уравнение состояния, получим систему уравнений, которая описывает замкнутую систему управления
и характеристический полином замкнутой системы

Неизвестные коэффициенты обратных связей по переменным состояния объекта можно определить из равенства полиному желаемого вида  . Последний либо выбирают на основе заданных значений перерегулирования
. Последний либо выбирают на основе заданных значений перерегулирования  % и времени регулирования
% и времени регулирования  из типовых (приложение Г), либо рассчитывают самостоятельно. Например, параметры качества регулирования
из типовых (приложение Г), либо рассчитывают самостоятельно. Например, параметры качества регулирования  с при отсутствии нулей обеспечит нормированный полином Баттерворта второго порядка
с при отсутствии нулей обеспечит нормированный полином Баттерворта второго порядка

Приравняв коэффициенты полиномов при одинаковых степенях  , получим
, получим

Расчет существенно упрощается, если объект представлен в канонической форме управляемости с  .
.
Коэффициент усиления  обычно находят из условия нулевой статической ошибки: либо по коэффициентам передаточной функции
обычно находят из условия нулевой статической ошибки: либо по коэффициентам передаточной функции

откуда

либо из инверсии матричной передаточной функции  при
при  .
.
Если для измерения доступна только одна величина на выходе  , для создания обратных связей по переменным состояния устанавливают наблюдатель, либо в цепи главной обратной связи системы используют ПД-регулятор (форсирующее звено) с эквивалентной передаточной функцией
, для создания обратных связей по переменным состояния устанавливают наблюдатель, либо в цепи главной обратной связи системы используют ПД-регулятор (форсирующее звено) с эквивалентной передаточной функцией  .
.
Пример №67
Рассчитать параметры модального регулятора для объекта
при требованиях к качеству регулирования

Решение:
Регулятор состоит из двух частей: обеспечивающей статические характеристики системы  и обеспечивающей динамические характеристики
и обеспечивающей динамические характеристики  (рисунок 2.25), для измерения доступна только выходная переменная у объекта.
(рисунок 2.25), для измерения доступна только выходная переменная у объекта.
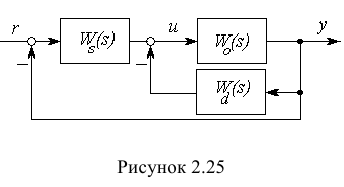
Выберем интегратор (И-регулятор) в качестве  чтобы обеспечить нулевую статическую ошибку
чтобы обеспечить нулевую статическую ошибку  пусть составляющая регулятора, обеспечивающая заданные динамические свойства равна
пусть составляющая регулятора, обеспечивающая заданные динамические свойства равна

здесь  — неизвестные коэффициенты,
— неизвестные коэффициенты,  — коэффициент передачи объекта регулирования.
— коэффициент передачи объекта регулирования.
Тогда характеристическое уравнение замкнутой системы равно
Выберем распределение корней, обеспечивающее заданное качество процессов, например,

(все действительные полюса обеспечат нулевое перерегулирование и время регулирования не более 3/2 = 1,5 с). Сформируем желаемое характеристическое уравнение третьего порядка

Приравнивая коэффициенты при соответствующих степенях  , получим расчетные соотношения
, получим расчетные соотношения

Отсюда находим параметры регулятора

Пример №68
ПФ объекта регулирования после нормирования имеет вид

заданные показатели качества: время регулирования 6 с, перерегулирование 0,02, выбрать параметры модального регулятора.
Решение:
Поскольку объект представлен передаточной функцией и не все переменные состояния измеряются, формируем наблюдатель состояния с параметрами

Исходя из требований к процессу регулирования замкнутой системы, выбираем корни  и определяем эталонный (желаемый) характеристический полином с коэффициентами
и определяем эталонный (желаемый) характеристический полином с коэффициентами  Характеристический полином третьей степени содержит один действительный корень и два комплексных сопряженных, по последним, полагая их доминирующими, и будем формировать показатели качества регулирования.
Характеристический полином третьей степени содержит один действительный корень и два комплексных сопряженных, по последним, полагая их доминирующими, и будем формировать показатели качества регулирования.
При заданном времени регулирования  с степень устойчивости для ошибки
с степень устойчивости для ошибки  равна
равна  = 3/6 = 0,5, отсюда действительная часть комплексного корня будет равна -0,5. Действительный корень принимаем в 10 раз большим, т.е. -5, чтобы исключить его влияние на переходный процесс. По заданной величине перерегулирования
= 3/6 = 0,5, отсюда действительная часть комплексного корня будет равна -0,5. Действительный корень принимаем в 10 раз большим, т.е. -5, чтобы исключить его влияние на переходный процесс. По заданной величине перерегулирования  = 0,02 вычисляем степень колебательности
= 0,02 вычисляем степень колебательности 
 , после чего можно вычислить мнимую часть комплексного корня
, после чего можно вычислить мнимую часть комплексного корня

По значениям корней -5 и  находим вид желаемого характеристического полинома
находим вид желаемого характеристического полинома

Из условия нулевой ошибки регулирования значение коэффициента усиления регулятора

Значения коэффициентов обратной связи по переменным состояния равны
Замкнутая система регулирования (рисунок 2.26) содержит объект управления на выходе  наблюдатель в форме, соответствующей каноническому управляемому представлению, П-регулятор с коэффициентом усиления и обратными связями
наблюдатель в форме, соответствующей каноническому управляемому представлению, П-регулятор с коэффициентом усиления и обратными связями  по переменным состояния, формируемым наблюдателем.
по переменным состояния, формируемым наблюдателем.
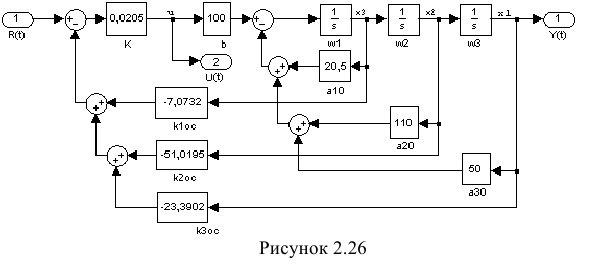
Передаточная функция замкнутой системы регулирования равна
Расчет подтверждает, что установившаяся ошибка отсутствует, так как коэффициент передачи в установившемся режиме равен 2,05/2,05 = 1, а полученный характеристический полином системы регулирования равен желаемому. При единственной обратной связи

Кстати дополнительная теория из учебников тут.
Преобразования подобия
При анализе и синтезе многомерных систем необходимо уметь переходить от одной формы к другой — поскольку все эти системы подобные, такой переход называется преобразованием подобия или базиса.
Один из путей перехода, приемлемый для одномерной системы
- составить по матрицам передаточную функцию системы, а по ней записать требуемое представление в пространстве состояний.
 передаточную функцию системы, а по ней записать требуемое представление в пространстве состояний.
передаточную функцию системы, а по ней записать требуемое представление в пространстве состояний.В общем же случае используют матрицу перехода или преобразования базиса  размера
размера , тогда новая система уравнений состояния и наблюдения объекта имеет вид
, тогда новая система уравнений состояния и наблюдения объекта имеет вид
откуда следует, что матрицы коэффициентов новой системы равны

(матрица  , при ее наличии, не претерпевает изменений, поскольку не связана с вектором состояний). Задаваясь произвольной матрицей
, при ее наличии, не претерпевает изменений, поскольку не связана с вектором состояний). Задаваясь произвольной матрицей  необходимого размера, можно получить бесконечное множество описаний одной и той же системы в пространстве состояний. Однако при любых преобразованиях должны выполняться два важных условия:
необходимого размера, можно получить бесконечное множество описаний одной и той же системы в пространстве состояний. Однако при любых преобразованиях должны выполняться два важных условия:
- исходная и преобразованная система должны иметь одинаковые собственные значения (характеристические многочлены и их корни);
- преобразование базиса не меняет передаточную функцию системы.
Приведение к канонической управляемой форме: матрица преобразования в этом случае равна отношению матрицы управляемости новой системы к матрице управляемости исходной, т.е.  . Необходимо найти характеристический полином системы, записать матрицы
. Необходимо найти характеристический полином системы, записать матрицы  и
и  системы в канонической управляемой форме, вычислить матрицы управляемости обеих систем и по ним матрицу преобразования , с помощью которой осуществляется переход.
системы в канонической управляемой форме, вычислить матрицы управляемости обеих систем и по ним матрицу преобразования , с помощью которой осуществляется переход.
Переход к канонической наблюдаемой форме отличается лишь тем, что используются матрицы наблюдаемости, причем матрица преобразования базиса вычисляется по отношению матрицы наблюдаемости исходной системы к матрице наблюдаемости новой  (обе матрицы составляются в виде столбца).
(обе матрицы составляются в виде столбца).
Для перехода к управляемой форме должна быть полностью наблюдаема пара  для перехода к наблюдаемой форме должна быть полностью наблюдаема пара
для перехода к наблюдаемой форме должна быть полностью наблюдаема пара  .
.
Обратный переход, т.е. возвращение к исходной системе, например, после выбора параметров модального регулятора, во всех случаях осуществляется применением матрицы в обратном порядке, т.е.

где  — матрица обратных связей замкнутой системы по переменным состояния.
— матрица обратных связей замкнутой системы по переменным состояния.
К диагональной форме  приводятся системы с некратными вещественными полюсами, при этом матрицы исходной и преобразованной систем связаны соотношением
приводятся системы с некратными вещественными полюсами, при этом матрицы исходной и преобразованной систем связаны соотношением  и матрица преобразования базиса равна
и матрица преобразования базиса равна  .
.
Пример №69
Пусть преобразуемый к канонической управляемой форме объект третьего порядка описывается системой уравнений
Решение:
Характеристический полином объекта равен

матрица управляемости
Используя вычисленный характеристический многочлен, записываем сопровождающую матрицу  затем для пары
затем для пары  найдем матрицу управляемости
найдем матрицу управляемости  новой системы и матрицу преобразования
новой системы и матрицу преобразования 

Применяя формулы

найдем описание системы в канонической форме управляемости (учитывая, что две матрицы были нам уже известны, оставалось вычислить лишь  )
)
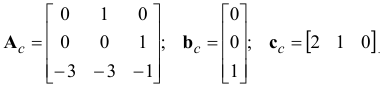
Примеры решения задач по всем темам теории автоматического управления
Теория автоматического управления — это научная дисциплина, которая возникла сравнительно недавно, хотя отдельные устройства, работавшие без участия человека, известны с глубокой древности.
Появившиеся в результате первого промышленного переворота в Европе в конце XVIII века регуляторы (1765 г. — регулятор уровня И.И. Ползунова, а в 1784 г.-регулятор скорости паровой машины Д. Уатта) были предназначены стабилизировать работу технических устройств, на которые действуют внешние факторы из окружающей среды. Очень эффективным способом оказалось использование отрицательной обратной связи, которую в XIX веке которую в XIX веке вводили еще полуинтуитивно, и без соответствующих расчетов это не всегда давало нужный эффект. Часто вместо предполагаемого улучшения работы применение регуляторов с отрицательной обратной связью приводило к неожиданным техническим явлениям: неустойчивости, генерации новых движений.
Для изучения этих явлений потребовались соответствующие методы, которые не только могли бы объяснить необычные свойства, но и позволили усмотреть общие закономерности поведения регуляторов. Их основы были изложены в появившихся в конце XIX века первых работах «о регуляторах» английского математика-механика Д. Максвелла (1866 г.) и русского механика И.А. Вышнеградского (1876, 1877 гг.).
Активное развитие новой теории началось с появлением электротехнических систем, в частности электромашинных, и систем радиоавтоматики. До сих пор классическим примером систем автоматического управления является система регулирования скорости электрической машины. Впоследствии оказалось, что методы теории автоматического управления позволяют объяснить работу объектов различной физической природы: в механике, энергетике, радио- и электротехнике, т. е. везде, где можно усмотреть обратную связь. Все методы объединяет одна общая задача: обеспечить необходимую точность и удовлетворительное качество переходных процессов. Таким образом, теория автоматического управления является по существу теорией процессов в системах с отрицательной обратной связью.
К настоящему времени теория автоматического управления является сложившейся научной дисциплиной со своим аналитическим аппаратом, в развитие которого большой вклад внесли известные русские ученые-математики A.M. Ляпунов, Е.А. Барбашин, Н.Н. Красовский и др.
Предметом изучения теории автоматического управления являются свойства, методы расчета и конструирования систем автоматики с обратными связями. Как и любая теория, она имеет дело не с реальными инженерными конструкциями, а с их моделями. Они выражаются, как правило, математическим языком, т.е. имеют вид определенных уравнений. Понятно после этого, что все выводы и рекомендации теории автоматического управления справедливы только при полном соответствии моделей и реальных устройств, но этого никогда не бывает на практике.
Результатом неполноты модели является различие в поведении теоретической и реальной систем, что обычно обнаруживается при наладке последней. Таким образом, этап настройки есть неизбежный шаг к получению работоспособной системы автоматического управления. Иногда при большом несоответствии математической модели свойствам реального технического устройства инженеру-проектировщику приходится ее снова уточнять и пересчитывать результат конструирования.
При нынешнем уровне развития науки и техники для составления моделей обычно используется аппарат дифференциальных уравнений, на языке которых сформулированы основные законы механики и физики макромира.
Итак, предметом теории автоматического управления являются свойства моделей систем автоматики, которые представлены дифференциальными уравнениями, а также их различными преобразованиями и интерпретациями.
Основные понятия и определения
Объект управления — техническое устройство (часть окружающего мира) или процесс, поведение которого нас не устраива» по каким-либо причинам.
Управление — процесс воздействия на объект управления с целью изменения его поведения нужным образом.
Регулирование — частный случай управления, целью которого является приведение объекта к заданному состоянию. Автоматический процесс — процесс, который совершается безучастия человека. Система — совокупность элементов, объединенных общим режимом функционирования. При этом элементом можно называть любое техническое устройство.
Динамическая система — система, процессы в которой изменяются с течением времени в силу собственных свойств.
Система автоматического управления (САУ) — динамическая система, которая работает без участия человека.
Теория автоматического управления (ТАУ) — научно-техническая дисциплина, в рамках которой изучаются свойства систем автоматического управления, разрабатываются принципы расчета и построения таких систем. Основными элементами САУ (рис. 1.1) являются: — объект управления (ОУ);
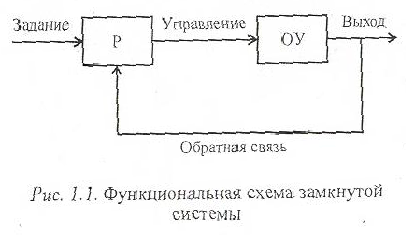
-управляющее устройство или регулятор (Р), который сравнивает выход управляемого объекта с желаемым и в зависимости от результата вырабатывает управляющий сигнал на объект.
Рассмотрим подробнее объект управления (рис. 1.2) и выделим характеризующие его переменные. К таким переменным относятся:
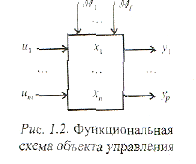
Требование парирования их влияния приводит к необходимости создания систем автоматического управления. Все переменные, которые характеризуют объект, удобно представить в векторной форме:
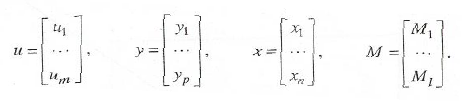
Входные воздействия на систему (или задание на регулятор) будем обозначать буквой  . Их число обычно совпадает с числом выходных переменных и изображается следующим вектором:
. Их число обычно совпадает с числом выходных переменных и изображается следующим вектором:

В дальнейшем для указания соответствующих векторных величин будем использовать обозначения:

 -мерное вещественное линейное пространство.
-мерное вещественное линейное пространство.
В зависимости от числа входных и выходных переменных выделяют:
Примеры систем управления
При обсуждении свойств автоматических устройств очень полезно обращаться к реальным примерам, которые достаточно распространены, и по ним можно представить себе поведение технической системы.
Рассмотрим несколько характерных примеров систем автоматического управления.
Задача 1.1
Одна из самых распространенных систем автоматики — система стабилизации скорости вращения двигателя постоянного тока с независимым возбуждением. Цель ее работы заключается в поддержании заданной скорости вращения двигателя при действии «нагрузки» на валу. Системы подобного типа используют, например, в металлорежущих станках, где независимо от глубины резания металла нужно выдерживать заданную скорость вращения. На рис. 1.3 представлена упрощенная схема реализации такой системы.
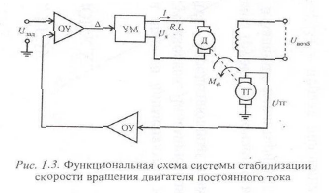
Здесь введены следующие обозначения:
 — задающее воздействие на систему (напряжение задания);
— задающее воздействие на систему (напряжение задания);
ОУ — операционные усилители для согласования электрических цепей на входе и выходе;
 — разница между напряжением задания и напряжением тахогенератора (сигнал рассогласования);
— разница между напряжением задания и напряжением тахогенератора (сигнал рассогласования);
УМ — усилитель мощности для преобразования маломощного сигнала в силовое напряжение (напряжение на якоре двигателя);
Д — электродвигатель;
 — ток в цепи электродвигателя;
— ток в цепи электродвигателя;
 — сопротивление и индуктивность в якорной цепи;
— сопротивление и индуктивность в якорной цепи;
 — напряжение на обмотке якоря электродвигателя;
— напряжение на обмотке якоря электродвигателя;
 — напряжение возбуждения;
— напряжение возбуждения;
ТГ — тахогенератор (маломощный генератор электрического напряжения), используется в качестве датчика скорости вращения двигателя;
 — напряжение тахогенератора;
— напряжение тахогенератора;
 — момент нагрузки.
— момент нагрузки.
В этой системе организована отрицательная обратная связь, при которой
Если нагрузка возрастает, то падает и, как следствие, возрастает , что позволяет «удержать» обороты двигателя при увеличенной нагрузке на двигатель. Если уменьшается, происходит обратный процесс, который не дает возможности двигателю слишком увеличить скорость вращения.
При описании этого классического примера введены переменные, которые используются для описания динамических систем: вход — , выход — , возмущение — , состояние —  , параметры —
, параметры —  .
.
Рассмотрим теперь общеизвестный пример из области бытовой техники -систему стабилизации температуры в холодильнике. В каждом холодильнике применяется достаточно простая система автоматического регулирования, цель функционирования которой состоит в стабилизации температуры в камере холодильника при изменении массы и температуры закладываемых продуктов или при открывании дверей. На рис. 1.4 приведена упрощенная схема системы стабилизации температуры.
Здесь — сигнал, соответствующий заданной температуре; УМ -усилитель мощности с релейной характеристикой, который используется в качестве управляющего устройства, он включает или отключает холодильный агрегат (ХА), «прокачивающий» хладоагент через трубки камеры; ДТ — датчик температуры, выходной сигнал  которого пропорционален температуре камеры.
которого пропорционален температуре камеры.
Как правило, в холодильнике не применяются операционные усилители; сравнение заданной и действительной температур происходит непосредственно. На схеме это показано соответствующим элементом.
Система работает следующим образом: если открыть камеру и положить некоторую массу теплых продуктов, то сразу повышается температура в камере и возрастает разница между заданной (низкой) и повышенной действительной температурами, включается УМ с релейной характеристикой и работает холодильный агрегат. Через некоторое время разница становится меньше порогового значения и реле отключается. Такая система работает только в «одну сторону» — на охлаждение. Ее поведение характеризуют величины: вход — , выход — напряжение с датчика температуры; состояние — температура внутри камеры, возмущение — количество тепла в закладываемом продукте.
Динамические характеристики линейных систем
Прежде чем изучать поведение реальных систем и их моделей, необходимо определить формальный язык, на котором будут обсуждаться их свойства. Основным элементом такого формального языка является понятие динамических характеристик, под которыми интуитивно понимают какие-либо соотношения, характеризующие свойства систем в статике и динамике (при изменении состояния).
Дадим следующее определение. Динамической характеристикой (математической моделью) системы будем называть любое соотношение, заданное аналитически, графически или в виде таблицы, которое позволяет оценить ее поведение во времени.
В этом разделе мы будем рассматривать различные способы описания линейных динамических систем, их взаимосвязь и приведение к принятой в теории автоматического управления форме записи математической модели.
Отметим, что динамическая характеристика дает возможность исследовать поведение системы, т. е. рассчитать для нее переходные процессы.
Дифференциальные уравнения
Наиболее часто в качестве математической модели объекта управления используются обыкновенные дифференциальные уравнения, которые могут быть записаны в различной форме.
Линейные многоканальные объекты обычно описывают системой дифференциальных уравнений первого порядка, представленной в векторно-матричном виде:
Здесь  — вектор состояния,
— вектор состояния,  — порядок объекта;
— порядок объекта;  -вектор управляющих воздействий,
-вектор управляющих воздействий,  — квадратная матрица действительных коэффициентов;
— квадратная матрица действительных коэффициентов;  — прямоугольная матрица действительных коэффициентов. Уравнения (2.1) называют дифференциальными уравнениями состояния.
— прямоугольная матрица действительных коэффициентов. Уравнения (2.1) называют дифференциальными уравнениями состояния.
Выходные переменные объекта изменяются в соответствии с уравнением выхода

где  — вектор выхода;
— вектор выхода;  — прямоугольная матрица действительных коэффициентов. Уравнения (2.1) и (2.2) описывают линейный многоканальный объект.
— прямоугольная матрица действительных коэффициентов. Уравнения (2.1) и (2.2) описывают линейный многоканальный объект.
Для описания одноканального объекта обычно используется скалярное дифференциальное уравнение:

которое также может быть приведено к виду (2.1) и (2.2) после соответствующего выбора линейно-независимых переменных состояния. Их число всегда равно порядку объекта (), a  и
и  .
.
Наиболее простое каноническое описание получается в случае, когда в качестве переменных состояния выбираются выходная переменная у и ее производные до ( -1) включительно

При этом вместо (2.3) имеем систему уравнений
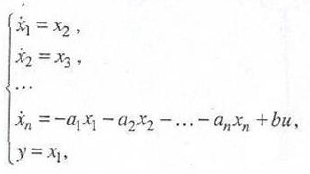
которая соответствует векторно-матричным уравнениям (2.1) и (2.2). Здесь матрицы  и имеют вид
и имеют вид
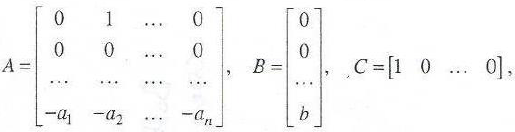
причем их размерности следующие:


Следует отметить, что переход к описанию (2.1), (2.2) не является однозначным: для одного объекта можно выбрать бесконечное множество наборов переменных состояния; важно, чтобы они были линейно-независимыми.
При этом каждой совокупности переменных состояния будут соответствовать свои матрицы объекта и .
Задача №2.1
Записать уравнения состояния одноканального объекта, модель которого имеет вид
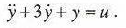
Решение:
Рассмотрим два варианта переменных состояния. 1. Если в качестве переменных состояния выбрать выходную величину и ее произвольную  , то получим канонические уравнения состояния и матрицы объекта типа (2.4):
, то получим канонические уравнения состояния и матрицы объекта типа (2.4):

2. Выбирая новые переменные  получим уравнения состояния и матрицы объекта
получим уравнения состояния и матрицы объекта

В общем случае одноканальный объект может описываться дифференциальным уравнением вида

Выбрав соответствующие переменные состояния, от описания (2.5) также можно перейти к векторно-матричным уравнениям типа (2.1), (2.2). Рассмотрим этот переход на примере.
Задача №2.2
Записать уравнения состояния объекта с математической моделью вида

Решение:
Разрешим ото уравнение относительно разности

выберем в качестве переменных состояния  и получим следующие уравнения состояния и матрицы объекта:
и получим следующие уравнения состояния и матрицы объекта:
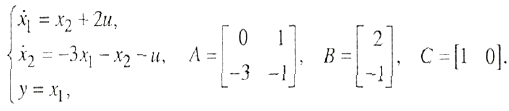
Таким образом, в качестве основной динамической характеристики линейных объектов управления используются дифференциальные уравнения, которые могут быть представлены в форме (2.1), (2.2).
В теории автоматического управления рассматриваются не физические системы управления, а их математические модели, поэтому необходимо стремиться к тому, чтобы эта модель достаточно адекватно отражала свойства реального устройства. Процедуру получения математической модели объекта можно разбить на следующие этапы:
Составление гносеологической (мысленной) модели объекта. Исходя из технического задания и изучения режимов работы объекта инженер создает приближенную мысленную модель, которая в дальнейшем уточняется и приобретает вид математической модели.
Определение независимых переменных, которые характеризуют объект, и уточнение их размерностей. При этом число управляющих воздействий не может быть меньше числа выходных переменных  . Размерность вектора переменных состояния не может быть меньше размерности вектора выходных переменных . Размерность возмущающих воздействий
. Размерность вектора переменных состояния не может быть меньше размерности вектора выходных переменных . Размерность возмущающих воздействий  может быть произвольной и никак не связана с размерностью
может быть произвольной и никак не связана с размерностью  .
.
Запись физических законов, в силу которых развиваются процессы в объекте.
Приведение уравнений объекта к удобному с точки зрения теории автоматического управления виду.
Математическая модель никогда не бывает, тождественна рассматриваемому объекту, так как при ее составлении всегда делают какие-либо допущения и упрощения. Поэтому для одной и той же системы в зависимости от целей управления модели могут быть различными.
При составлении математической модели приходится искать компромиссный вариант между двумя противоречивыми требованиями: с одной стороны, модель должна наиболее полно отражать свойства реальной системы, с другой — быть простой, чтобы не затруднять исследований.
Задача №2.3
Определить математическую модель электрической цепи (рис. 2.1), записать для нее уравнения состояния.
Физическими законами, в силу которых развиваются процессы в объекте, являются законы Кирхгофа
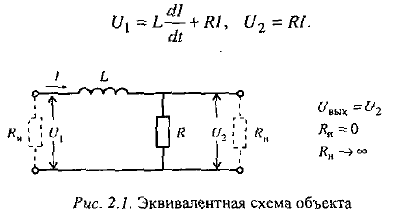
Решение:
Перейдем к удобному с точки зрения теории управления описанию объекта. При этом выходной величиной будем считать напряжение на выходе цепи, т. е.  , управляющим воздействием -напряжение на ее входе
, управляющим воздействием -напряжение на ее входе  , а переменной состояния- ток, протекающий по цепи
, а переменной состояния- ток, протекающий по цепи  . С учетом
. С учетом
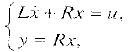
a затем перейдем к принятому описанию в переменных состояния
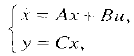
где

Задача №2.4
Рассмотрим в качестве еще одного примера составление математической модели двигателя постоянного тока с независимым возбуждением (рис. 2.2), который часто используется в системах автоматического управления.
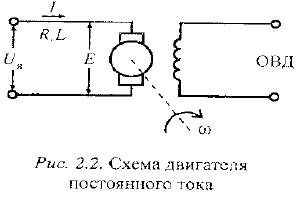
Решение:
Здесь  — напряжение, подаваемое на якорь ОВД двигателя, которое будем считать входным воздействием;
— напряжение, подаваемое на якорь ОВД двигателя, которое будем считать входным воздействием;  — ток в не пи якоря, представляющий собой внутреннюю переменную объекта;
— ток в не пи якоря, представляющий собой внутреннюю переменную объекта;  — сопротивление и индуктивность цепи, якоря;
— сопротивление и индуктивность цепи, якоря;  — противоЭДС, т. е. напряжение, возникающее в обмотке якоря в результате его вращения в магнитном поле;
— противоЭДС, т. е. напряжение, возникающее в обмотке якоря в результате его вращения в магнитном поле;  — скорость вращения двигателя, которую будем считать выходной переменной; ОВД — обмотка возбуждения двигателя.
— скорость вращения двигателя, которую будем считать выходной переменной; ОВД — обмотка возбуждения двигателя.
Запишем основные уравнения, характеризующие процессы в двигателе. Уравнение электрического равновесия якорной цепи имеет вид
Уравнение равновесия моментов на валу двигателя следующее:
где  — приведенный момент инерции;
— приведенный момент инерции;  — вращающий момент;
— вращающий момент;  — момент сопротивления на валу двигателя, который является возмущающим воздействием.
— момент сопротивления на валу двигателя, который является возмущающим воздействием.
С достаточной степенью точности во многих случаях можно считать, что

где

В результате уравнения двигателя принимают вид
Введем следующие обозначения:  — управление;
— управление; 
 — переменные состояния;
— переменные состояния;  — возмущение. Запишем уравнения двигателя в переменных состояния
— возмущение. Запишем уравнения двигателя в переменных состояния
где

Часто модель двигателя представляют в виде одного дифференциального уравнения

Здесь  — электромеханическая постоянная времени двигателя;
— электромеханическая постоянная времени двигателя;  — электромагнитная постоянная времени якорной цепи;
— электромагнитная постоянная времени якорной цепи;  — коэффициент усиления;
— коэффициент усиления;  .
.
Задача №2.5
Рассмотрим перевернутый маятник, ось которого монтируется на тележке (каретке); перемещающейся в горизонтальном направлении [9]. В совокупности такое устройство представляет собой объект управления, называемый «кареткой — маятником». Его схематичная модель изображена на рис. 2.3.
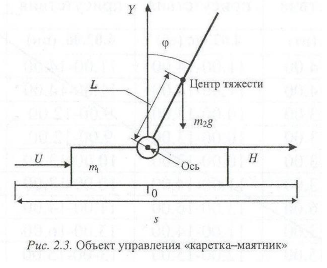
Решение:
Здесь  — угол отклонения маятника (выходная переменная);
— угол отклонения маятника (выходная переменная);  — прикладываемая управляющим двигателем сила (входная переменная);
— прикладываемая управляющим двигателем сила (входная переменная);  — перемещение каретки;
— перемещение каретки;  -масса каретки;
-масса каретки;  — расстояние между осью и центром тяжести маятника;
— расстояние между осью и центром тяжести маятника;  — масса маятника;
— масса маятника;  — момент инерции относительно центра тяжести;
— момент инерции относительно центра тяжести;  — ускорение силы тяжести;
— ускорение силы тяжести;  и
и  — горизонтальная и вертикальная силы реакции у оси маятника.
— горизонтальная и вертикальная силы реакции у оси маятника.
Упрощенная модель объекта «каретка — маятник» может быть представлена системой дифференциальных уравнений [9]
где

эффективная длина маятника.
Перейдем к описанию модели объекта в переменных состояния вида (2.1). В качестве компонент вектора состояния выберем следующие величины:
а выходной переменной объекта является угол отклонения маятника  . В результате уравнения состояния принимают вид
. В результате уравнения состояния принимают вид
Теперь определим матрицы объекта:
Переходная характеристика
Эта динамическая характеристика используется для описания одноканальных объектов (2.5)

с нулевыми начальным!! условиями

Переходной характеристикой (переходной функцией)  называется реакция системы на единичное ступенчатое входное воздействие
называется реакция системы на единичное ступенчатое входное воздействие  при нулевых начальных условиях.
при нулевых начальных условиях.
Отметим, что единичная ступенчатая функция — это функция, которая обладает свойством
На рис. 2.4 приведен пример переходной характеристики системы.
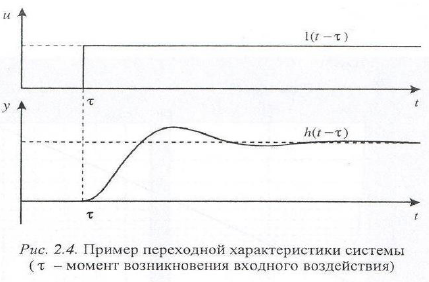
Для аналитического определения переходной функции следует решить дифференциальное уравнение при нулевых начальных условиях и единичном входном воздействии.
При исследовании реального объекта переходную характеристику можно получить экспериментальным путем, подавая на его вход ступенчатое воздействие и фиксируя реакцию на выходе. Если входное воздействие представляет собой неединичную ступенчатую функцию 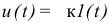 то выходная величина будет равна
то выходная величина будет равна  , т. е. представляет собой переходную характеристику с коэффициентом пропорциональности
, т. е. представляет собой переходную характеристику с коэффициентом пропорциональности  .
.
Зная переходную характеристику, можно вычислить реакцию системы на произвольное входное воздействие с помощью интеграла свертки

( — переменная интегрирования).
— переменная интегрирования).
Импульсная переходная функция
Эта характеристика также используется для описания одноканальных объектов вида (2.5).
Импульсная переходная функция (характеристика)  представляет собой реакцию на входное воздействие типа единичной импульсной функции при нулевых начальных условиях (рис. 2.5).
представляет собой реакцию на входное воздействие типа единичной импульсной функции при нулевых начальных условиях (рис. 2.5).
Такое входное воздействие математически отражает дельта-функция, которая обладает следующими свойствами:
С помощью дельта-функции можно описать реальное входное воздействие типа удара. В действительности импульсные входные воздействия на объект всегда конечны по уровню и продолжительности. Однако если их длительность намного меньше длительности переходных процессов, то с определенной точностью реальный импульс может быть заменен дельта-функцией с некоторым коэффициентом.
Импульсная переходная функция позволяет вычислить реакцию системы на произвольное входное воздействие при нулевых начальных условиях по выражению
Переходная характеристика и импульсная переходная функция однозначно связаны между собой соотношениями
Уравнения (2,9) позволяют при одной известной характеристике оп реле лить вторую.
Переходная матрица
Данная динамическая характеристика применяется для описания многоканальных систем вида (2.1), (2.2) при нулевых входных воздействиях, т. е. для автономных систем

Переходная матрица представляет собой решение матричного дифференциального уравнения

при единичных начальных условиях
Она обладает следующими свойствами:
Зная переходную матрицу, можно вычислить реакцию системы
на произвольное входное воздействие при любых начальных условиях  по выражению
по выражению
Здесь первое слагаемое описывает свободную составляющую движения. второе — вынужденную. Соотношение для выходных переменных следующее:
Если система имеет нулевые начальные условия  , то выражение (2.14) принимает вид:
, то выражение (2.14) принимает вид:
Матрица  называется матричной импульсной переходной функцией. Каждая ее компонента представляет собой импульсную переходную функцию
называется матричной импульсной переходной функцией. Каждая ее компонента представляет собой импульсную переходную функцию  , которая является реакцией
, которая является реакцией  -го выхода системы на
-го выхода системы на  -e импульсное входное воздействие при нулевых начальных условиях и отсутствии остальных входных воздействий
-e импульсное входное воздействие при нулевых начальных условиях и отсутствии остальных входных воздействий
Дли многоканальных систем может быть определена также матричная переходная характеристика в виде
Для линейных систем с постоянными параметрами переходная матрица  представляет- собой матричную экспоненту
представляет- собой матричную экспоненту

где

С учетом (2.18) выражения (2.13) и- (2,14) принимают вид
В этом случае матричная импульсная переходная функция линейной системы с постоянными коэффициентами может быть найдена по соотношению
При небольших размерах или простой структуре матрицы объекта  выражение (2.18) может быть использовано для точного представления переходной матрицы с помощью элементарных функций. В случае большой размерности матрицы следует использовать существующие программы для вычисления матричного экспоненциала.
выражение (2.18) может быть использовано для точного представления переходной матрицы с помощью элементарных функций. В случае большой размерности матрицы следует использовать существующие программы для вычисления матричного экспоненциала.
Передаточная функция
Наряду с обыкновенными дифференциальными уравнениями в теории автоматического управления используются различные их преобразования. Для линейных систем эти уравнения удобнее представлять в символической форме с применением так называемого оператора дифференцирования

что позволяет записывать дифференциальные уравнения как алгебраические и вводить новую динамическую характеристику -передаточную функцию. Этот способ был предложен английским ученым Хевисайдом в 1895 г., позднее он был строго обоснован аппаратом интегральных преобразований Лапласа и Карсона [4] в предположении нулевых начальных условий.
Рассмотрим этот переход для многоканальных систем общего вида

Запишем уравнение состояния в операторной форме
что позволяет определить вектор состояния
и выходные переменные системы
Матрица взаимосвязи между выходными переменными и управляющими воздействиями в выражении (2.23) называется матричной передаточной функцией и обозначается

Она имеет размерность  :
:
где  — скалярные передаточные функции, которые представляют собой отношение выходной величины к входной в символической форме при нулевых начальных условиях
— скалярные передаточные функции, которые представляют собой отношение выходной величины к входной в символической форме при нулевых начальных условиях 
Собственными передаточными функциями -го канала называются компоненты передаточной матрицы  которые находятся на главной диагонали (2.25). Составляющие, расположенные выше или ниже главной диагонали (2.25), называются передаточными функциями перекрестных связей между каналами.
которые находятся на главной диагонали (2.25). Составляющие, расположенные выше или ниже главной диагонали (2.25), называются передаточными функциями перекрестных связей между каналами.
Как известно, обратная матрица может быть найдена по выражению
может быть найдена по выражению
где  — присоединенная матрица. Как следует № (2,26), все скалярные передаточные функции в (2.25) содержат одинаковый знаменатель
— присоединенная матрица. Как следует № (2,26), все скалярные передаточные функции в (2.25) содержат одинаковый знаменатель

который называется характеристическим полиномом и имеет  -й порядок.
-й порядок.
Если теперь характеристический полином приравнять нулю, то получим характеристическое уравнение системы

Уравнение (2.27) имеет корней, которые называются полюсами системы 
Задача №2.6
Определить передаточную матрицу для объекта
где
Решение:
Воспользуемся выражением для передаточной матрицы (2.24) и найдем предварительно обратную матрицу (2.26). Здесь
Присоединенная матрица имеет вид
В результате получим обратную матрицу
и передаточную матрицу объекта
Как видим, все скалярные передаточные функции из этой матрицы имеют одинаковый знаменатель, который представляет собой характеристический полином объекта.
Чаще всего передаточные функции применяются для описания одноканальных систем вида (2.5)

С использованием оператора дифференцирования р запишем уравнение (2.28) в символической форме и найдем передаточную функцию как отношение выходной величины к входной:

где  — характеристический полином. Его корни,
— характеристический полином. Его корни,

называются полюсами, а корни полинома числителя передаточной функции,

называются нулями системы.
Передаточные функции динамических систем принято записывать в следующей стандартной форме:
где  — коэффициент усиления;
— коэффициент усиления;


Передаточную матрицу (передаточную функцию) можно также определить с помощью изображений Лапласа или Карсона — Хеви-сайда. Если подвергнуть одному из этих преобразований обе части дифференциального уравнения и найти соотношения между входными и выходными величинами при нулевых начальных условиях, то получим ту же самую передаточную матрицу (2.24) или функцию (2.29).
Все динамические характеристики объекта взаимосвязаны: получив одну из них, можно определить все остальные. Мы рассмотрели переход от дифференциальных уравнений к передаточным функциям с помощью оператора дифференцирования  . Используя этот оператор, несложно перейти от передаточной функции к символической форме записи дифференциального уравнения, а затем к стандартному описанию объекта в форме (2.3) или (2.5).
. Используя этот оператор, несложно перейти от передаточной функции к символической форме записи дифференциального уравнения, а затем к стандартному описанию объекта в форме (2.3) или (2.5).
Обсудим теперь взаимосвязь между переходными характеристиками и передаточной функцией. С этой целью запишем выражение для выходной переменной объекта через импульсную переходную функцию в соответствии с (2.8)
Подвергнем его преобразованиям Лапласа [2,9,12]
и получим соотношение  из которого определим
из которого определим  в виде
в виде
Таким образом, передаточная функция представляет собой преобразование по Лапласу импульсной переходной функции.
Задача №2.7
Определять передаточную функцию, нули и полюса для объекта, модель которого задана уравнением

Решение:
Запишем исходное уравнение объекта в операторной форме с помощью оператора дифференцирования

Определим теперь передаточную функцию
Характеристическое уравнение объекта имеет яид

Передаточная функция содержит два полюса  и один нуль
и один нуль 
Определить передаточную функцию двигателя постоянного тока с независимым возбуждением (см. рис. 2.2).
Дифференциальное уравнение двигателя получено в примере 2.4 и имеет вид

Будем полагать, что возмущающее воздействие отсутствует, т. е.  . Запишем это уравнение в символической форме с помощью оператора дифференцирования
. Запишем это уравнение в символической форме с помощью оператора дифференцирования

или, рассматривая его как алгебраическое,

Определим теперь передаточную функцию двигателя постоянного тока с независимым возбуждением
Как видим, она не содержит нулей и имеет два полюса, которые в зависимости от численных значений параметров  и
и  могут быть вещественными или комплексно-сопряженными.
могут быть вещественными или комплексно-сопряженными.
Модальные характеристики
Модальные характеристики соответствуют свободной составляющей движения системы (2.1) или, другими словами, отражают свойства автономной системы (2.10)
Будем искать ее решение в виде экспоненты

где  — скалярная экспонента,
— скалярная экспонента,  — вектор начальных условий.
— вектор начальных условий.
Подставляя решение (2.33) в исходное уравнение (2.32), после преобразований получим
Система уравнений (2.34) будет иметь ненулевое решение относительно  , если
, если
Уравнение (2.35) есть характеристическое уравнение системы и имеет  корней
корней  , которые называются собственными значениями матрицы
, которые называются собственными значениями матрицы  . При подстановке собственных значений в (2.35) получим
. При подстановке собственных значений в (2.35) получим
( — собственные векторы,
— собственные векторы,  ),
),
Совокупность собственных значений и собственных векторов представляет собой модальные характеристики системы.
Для (2.32) могут существовать лишь экспоненциальные решения
которые называют модами. Полное решение системы (2.32) представляет собой линейную комбинацию мод:
Для получения характеристического уравнения системы можно использовать выражение (2.27), т. е. приравнять нулю общий знаменатель передаточной матрицы (передаточной функции).
При исследовании свойств системы ее собственные значения (полюса) удобно изображать в виде точек на комплексной плоскости (рис. 2.6). Такое графическое представление корней характеристического уравнения называют корневым портретом системы. С его помощью в ряде случаев можно практически без вычислений оценить Рис. 2 6. Пример корневого качественные свойства процессов, портрета системы протекающих в линейных системах.
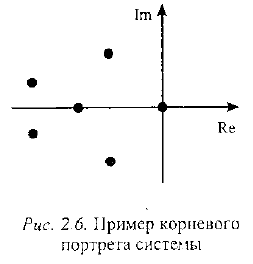
Задача №2.9.
Изобразить корневой портрет объекта, поведение которого описывают следующие уравнения:
Решение:
Определим матрицу объекта

и запишем характеристическое уравнение

Собственные значения матрицы следующие:

Они изображены на комплексной плоскости корней в виде точек (рис. 2.7).
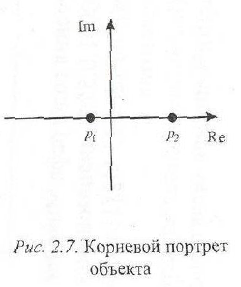
Частотные характеристики
Важными динамическими характеристиками объекта являются его частотные характеристики, которые определяют взаимосвязь между параметрами периодических сигналов на входе и выходе. Чаще всего их используют для описания одноканальных объектов:
Если на его вход подавать гармонический сигнал заданной амплитуды  и частоты
и частоты  ,
,
то на выходе в установившемся режиме у устойчивого объекта (гл. 4) будет также гармонический сигнал той же частоты, но в общем случае другой амплитуды со сдвигом по фазе
Для нахождения соотношения между входным и выходным гармоническими сигналами можно воспользоваться передаточной функцией (2.38), из которой формальной заменой  на
на  получим обобщенную частотную характеристику
получим обобщенную частотную характеристику
Ее можно представить в виде

Составляющие обобщенной частотной характеристики  имеют самостоятельное значение и следующие названия:
имеют самостоятельное значение и следующие названия:
 — вещественная частотная характеристика (ВЧХ),
— вещественная частотная характеристика (ВЧХ),  — мнимая частотная характеристика (МЧХ),
— мнимая частотная характеристика (МЧХ),
 — амплитудная частотная характеристика (АЧХ),
— амплитудная частотная характеристика (АЧХ),  — фазовая частотная характеристика (ФЧХ).
— фазовая частотная характеристика (ФЧХ).
Для исследования частотных свойств объекта или системы удобно использовать графическое представление частотных характеристик. В этом случае обобщенная частотная характеристика может быть построена на комплексной плоскости в соответствии с выражением (2.40), когда каждому значению частоты  , соответствует вектор
, соответствует вектор  .
.
При изменении  от 0 до
от 0 до  конец этого вектора «прочерчивает» на комплексной плоскости кривую, которая называется амплитудно-фазовой характеристикой (АФХ).
конец этого вектора «прочерчивает» на комплексной плоскости кривую, которая называется амплитудно-фазовой характеристикой (АФХ).
Наряду с амплитудно-фазовой характеристикой (рис. 2.8) можно также построить все остальные частотные характеристики. Так, амплитудная частотная показывает, как звено пропускает
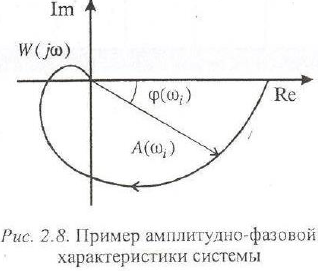
Сигналы различной частоты; причем оценкой пропускания является отношение амплитуд выходного  и входного сигналов
и входного сигналов  . Фазовая частотная характеристика отражает фазовые сдвиги, вносимые системой на различных частотах.
. Фазовая частотная характеристика отражает фазовые сдвиги, вносимые системой на различных частотах.
Наряду с рассмотренными частотными характеристиками в теории автоматического управления используются логарифмические частотные характеристики. Удобство работы с ними объясняется тем, что операции умножения и деления заменяются на операции сложения и вычитания, а это позволяет во многих случаях строить их практически без вычислений.
Амплитудная частотная характеристика, построенная в логарифмическом масштабе,
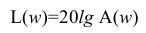
называется логарифмической амплитудной частотной характеристикой (ЛАЧХ). При этом амплитуда измеряется в децибелах (дБ). При изображении ЛАЧХ (рис. 2.9) удобнее по оси абсцисс откладывать частоту также в логарифмическом масштабе, т. е.  , выраженную в декадах (дек.).
, выраженную в декадах (дек.).
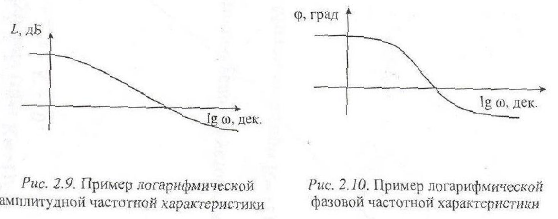
На практике применяется также и логарифмическая фазовая частотная характеристика. При ее изображении используется ось абсцисс, на которой указывают частоту в логарифмическом масштабе, а по оси ординат откладывают фазу в дуговых градусах в линейном масштабе (рис. 2.10).
Задача №2.10
Для объекта с заданной передаточной функцией
построить амплитудно-фазовую (АФХ), вещественную частотную и фазовую частотную характеристики (ВЧХ, ФЧХ).
Решение:
Запишем выражение для обобщенной частотной характеристики, сделав замену в передаточной функции  :
:

Выражения для ВЧХ и ФЧХ имеют вид

Соответствующие частотные характеристики, построенные при изменении частоты от 0 до , представлены на рис. 2.11.
Структурный метод
Для расчета различных систем автоматического управления их обычно разбивают на отдельные элементы, динамическими характеристиками которых являются дифференциальные уравнения не выше второго порядка. Причем различные по своей физической природе элементы могут описываться одинаковыми дифференциальными уравнениями, поэтому их относят к определенным классам, называемым типовыми звеньями.
Изображение системы в виде совокупности типовых звеньев с указанием связей между ними называется структурной схемой. Она может быть получена на основе как дифференциальных уравнений, так и передаточных функций. Данный способ и составляет суть структурного метода, т. е. метода представления систем автоматического управления различной физической природы.
Хотя структурный метод не предлагает новых способов расчета, он позволяет наглядно представить взаимосвязь элементов системы и оценить при наличии соответствующего опыта отдельные свойства переходных и статических процессов.
Он настолько широко используется в практике проектирования, что, по существу, может считаться одним из «языков», на котором обсуждаются свойства систем автоматического управления.
Рассмотрим подробнее отдельные типовые звенья и их различные динамические характеристики.
Типовые динамические звенья, пропорциональное (усилительное) звено
Пропорциональным называется звено, поведение которого описывает алгебраическое уравнение

где  — коэффициент усиления. Строго говоря, это звено не является динамическим, но относится к типовым.
— коэффициент усиления. Строго говоря, это звено не является динамическим, но относится к типовым.
Примерами таких звеньев могут служить безынерционные усилители, механические редукторы, многие датчики сигналов и т. д. передаточная функция звена следующая:
Переходная характеристика (реакция звена на скачкообразное входное воздействие  ) имеет вид
) имеет вид

Импульсная переходная функция пропорционального звена определяется выражением
Модальные характеристики (собственные значения и собственные векторы) для него отсутствуют.
Заменив в передаточной функции  на
на  , получим выражения для частотных характеристик. Амплитудно-фазовая характеристика представляет собой точку на комплексной плоскости в соответствии с формулой
, получим выражения для частотных характеристик. Амплитудно-фазовая характеристика представляет собой точку на комплексной плоскости в соответствии с формулой
Вещественная частотная характеристика определяется соотношением (рис. 3.1).

а мнимая частотная характеристика отсутствует  .
.
Амплитудная частотная характеристика может быть построена по соотношению

и имеет тот же вид, что и ВЧХ. Выражение для ФЧХ следующее:

Таким образом, при прохождении через пропорциональное звено амплитуда периодического входного сигнала изменяется в  раз, а базовый сдвиг отсутствует.
раз, а базовый сдвиг отсутствует.
Амплитудно-фазовая характеристика звена имеет вид точки на комплексной плоскости (рис. 3.2).
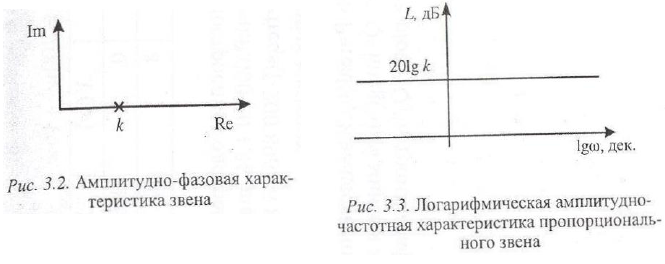
Логарифмическая АЧХ звена представляет собой прямую, параллельную оси абсцисс:

Как следует из выражений (3.3, 3.4) и рис. 3.3, пропорциональное звено пропускает входные сигналы без искажений.
Дифференцирующее звено
Дифференцирующим называется звено, которое описывается дифференциальным уравнением

Его передаточная функция имеет вид
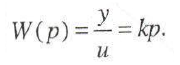
Примером дифференцирующего звена часто может служить тахогенератор постоянного тока. Переходная характеристика дифференцирующего звена определяется выражением
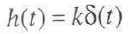
и имеет вид 5 -функции (рис. 3.4).
Импульсная переходная функция (рис. 3.5) представляет собой «дуплет»  -функций
-функций
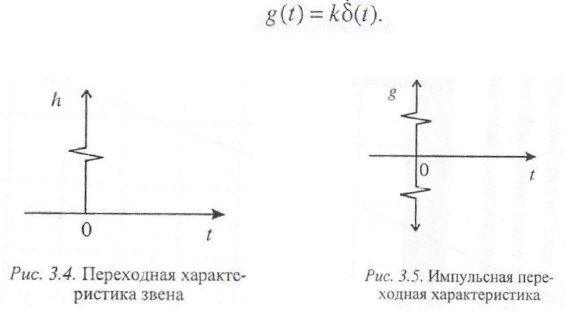
Рассмотрим теперь частотные характеристики звена. Амплитудно-фазовая характеристика
совпадает с положительной мнимой полуосью комплексной плоскости; вещественная частотная характеристика равна нулю, Л(ц>) = 0; мнимая частотная характеристика соответствует выражжению
т. е. представляет собой линейно нарастающую функцию. С ней совпадает амплитудная частотная характеристика, которая имеет вид

Фазовую частотную характеристику можно определить по соотношению
Следовательно, на всех частотах имеется постоянный фазовый сдвиг.
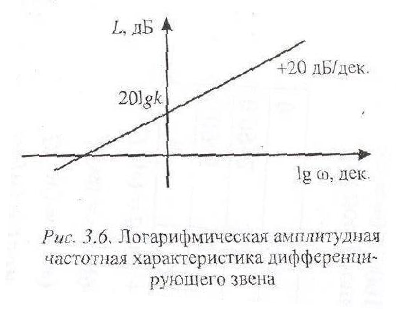
Интегрирующее звено
Интегрирующим называется звено, поведение которого описывает уравнение
Примером интегрирующего звена является операционный усилитель в режиме интегрирования.
Основной динамической характеристикой звена является его дифференциальное уравнение

на основе которого можно получить передаточную функцию
Характеритическое уравнение

имеет единственный корень (полюс),  , который представляет собой модальную характеристику интегрирующего звена.
, который представляет собой модальную характеристику интегрирующего звена.
Переходная характеристика звена имеет вид линейно возрастающей функции
а импульсная переходная функция — ступенчатой функции
Выражение для амплитудно-фазовой частотной характеристики (рис. 3.7) получим, заменив в (3.12)  на
на  :
:
Вещественная частотная характеристика отсутствует,  . Мнимая частотная характеристика имеет вид
. Мнимая частотная характеристика имеет вид
а амплитудная частотная характеристика
При этом фазовая частотная характеристика следующая:
т. е. звено имеет постоянный фазовый сдвиг, который не зависит от частоты.
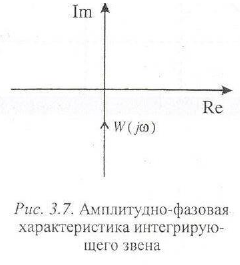
Амплитудно-фазовая характеристика интегрирующего звена имеет вид прямой, совпадающей с отрицательной мнимой полуосью комплексной плоскости (рис. 3.7). Запишем выражение для логарифмической амплитудно-частотной характеристики

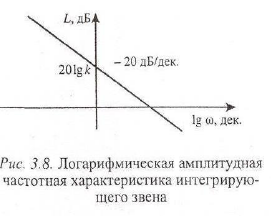
и изобразим ее график (рис.3.8) Как видим, логарифмическая амплитудная частотная характеристика интегратора представляет собой прямую с наклоном — 20 дБ/дек. и пересекает ось ординат в точке 20  . Она показывает, что звено усиливает низкочастотные сигналы и ослабляет высокочастотные.
. Она показывает, что звено усиливает низкочастотные сигналы и ослабляет высокочастотные.
Апериодическое звено
Апериодическим называется звено, дифференциальное уравнение которого имеет вид
Различного типа двигатели являются примерами такого звена. Дифференциальное уравнение апериодического звена принято записывать в стандартном виде:
где  — постоянная времени;
— постоянная времени;  — коэффициент усиления звена.
— коэффициент усиления звена.
Заменив в (3.18)  на перейдем к символической записи дифференциального уравнения
на перейдем к символической записи дифференциального уравнения
и найдем передаточную функцию апериодического звена:
Для определения модальных характеристик по передаточной функции (3.20) запишем характеристическое уравнение
Оно имеет единственный корень (полюс),  .
.
Переходную характеристику звена (рис. 3.9) можно найти как решение уравнения (3.18) при

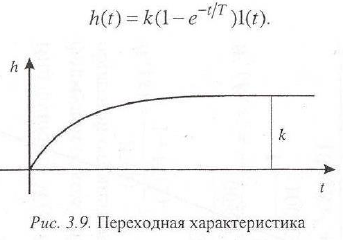
Импульсную переходную функцию (рис. 3.10) вычислим по соотношению
Выражение, соответствующее амплитудно-фазовой характеристике апериодического звена, имеет вид

По выражению
можно построить его вещественную частотную характеристику (рис. 3.11).
Мнимая частотная характеристика (рис. 3.12) апериодического звена соответствует уравнению
Амплитудную частотную характеристику (рис. 3.13) описывает выражение
Фазовая частотная характеристика звена определяется соотношением
Она представляет собой кривую (рис. 3.14) с пределом
На комплексной плоскости по выражению (3.24) можно построить амплитудно-фазовую характеристику апериодического звена, которая имеет вид полуокружности (рис. 3.15).
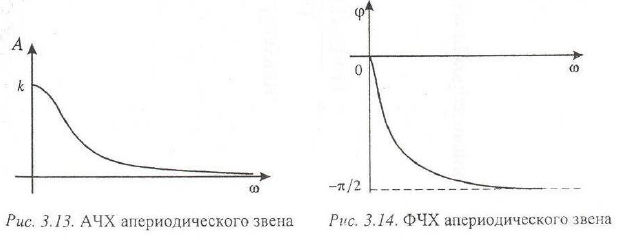
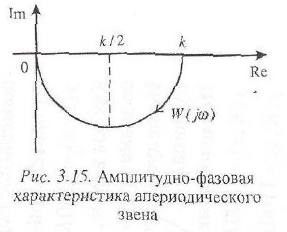
Запишем выражение для логарифмической амплитудной частотной характеристики
Наиболее просто для звена можно построить асимптотическую логарифмическую амплитудную частотную характеристику. В этом случае следует рассмотреть отдельно области высоких и низких частот и для каждой определить свою асимптоту:
1) в области низких частот, когда  вместо точной ЛАЧХ (3.29) можно рассмотреть приближенную
вместо точной ЛАЧХ (3.29) можно рассмотреть приближенную
2) в области высоких частот при  вторая асимптота имеет вид
вторая асимптота имеет вид

На частоте  которая называется собственной частотой апериодического звена, справедливо условие
которая называется собственной частотой апериодического звена, справедливо условие
Точная характеристика звена на рис. 3.16 показана пунктирной линией и несколько отличается от асимптотической ЛАЧХ, причем наибольшая погрешность будет на собственной частоте  .
.
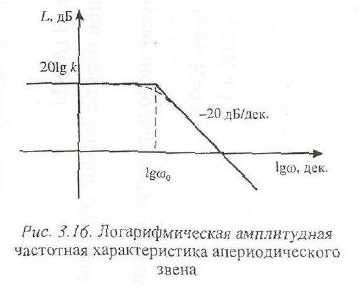
Форсирующее звено
Форсирующим называется звено, дифференциальное уравнение которого имеет вид
Нетрудно убедиться в том, что (3.32) можно представить как сумму уравнений пропорционального и дифференцирующего звеньев. Передаточную функцию форсирующего звена
принято записывать в стандартной форме
где  — коэффициент усиления, а
— коэффициент усиления, а  — постоянная времени звена.
— постоянная времени звена.
Передаточная функция (3.33) содержит полином в числителе, корень которого  называется «нулем» форсирующего звена. Его переходная характеристика определяется соотношением
называется «нулем» форсирующего звена. Его переходная характеристика определяется соотношением

Качественный вид ее приведен на рис. 3.17.

Импульсная переходная функция звена следующая:

Обобщенная частотная характе-стика находится по пе функции (3.33) и имеет вид
Соответствующая амплитудно-фазовая характеристика изображена на рис. 3.18.
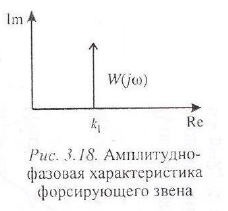
Вещественная частотная характеристика звена не зависит от частоты и равна

мнимая частотная характеристика представляет собой прямую фазовая характеристика форсирующего звена
Амплитудная частотная характеристика может быть построена по выражению
а фазовая частотная характеристика
причем в пределе
На основании выражения для  определим логарифмическую амплитудную частотную характеристику
определим логарифмическую амплитудную частотную характеристику

Как и в предыдущем случае, для форсирующего звена удобнее строить не точную, а асимптотическую ЛАЧХ (рис. 3.19). Здесь  — собственная частота звена.
— собственная частота звена.
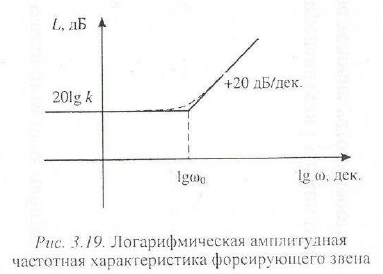
Логарифмическая амплитудная частотная характеристика форсирующего звена
Причем се можно получить, исследуя отдельно области низких „ высоких частот или суммируя ЛАЧХ пропорционального и дифференцирующего звеньев.
Нетрудно убедиться, сравнивая выражения (3.28) и (3.29) с выражениями (3.37) и (3.38), в том, что логарифмические амплитудная и фазовая частотные характеристики форсирующего звена представляют собой зеркальное отображение относительно оси абсцисс соответствующих логарифмических характеристик апериодического звена.
Звено второго порядка
Дифференциальное уравнение звена второго порядка
принято записывать в стандартном виде

где  — постоянная времени звена;
— постоянная времени звена;  — коэффициент демпфирования, который определяет склонность переходных процессов к колебаниям,
— коэффициент демпфирования, который определяет склонность переходных процессов к колебаниям,  — коэффициент усиления.
— коэффициент усиления.
Передаточную функцию звена получим на основе символической записи дифференциального уравнения

в виде
Для определения модальных характеристик запишем характеристическое уравнение звена
Оно имеет два корня (полюса), которые в зависимости от коэффициента демпфирования  могут быть вещественными или комплексно-сопряженными, что приводит к различным переходным процессам. Рассмотрим варианты корней.
могут быть вещественными или комплексно-сопряженными, что приводит к различным переходным процессам. Рассмотрим варианты корней.

В случае, когда коэффициент демпфирования изменяется в диапазоне  , звено второго порядка называют колебательным. Выражение для его переходной характеристики следующее:
, звено второго порядка называют колебательным. Выражение для его переходной характеристики следующее:

Причем колебательность переходного процесса будет тем больше, чем меньше коэффициент демпфирования . В пределе при = О будут иметь место незатухающие колебания. В этом случае звено называется консервативным. Соответствующие графики переходных процессов представлены на рис. 3.21.
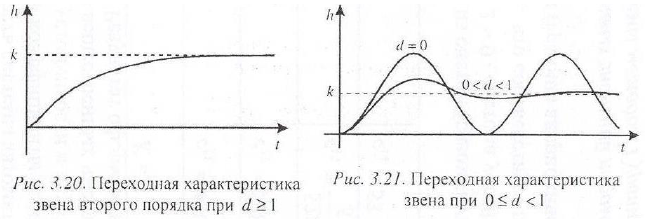
Определим выражение для общей частотной характеристики колебательного звена, заменив  на
на  в передаточной функции (3.41):
в передаточной функции (3.41):

Запишем выражения для вещественной частотной характеристики
и мнимой частотной характеристики:
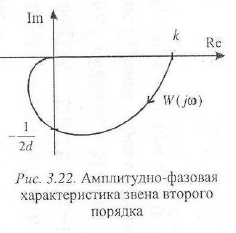
На основе (3.46) и (3.47) построим АЧХ на комплексной плоскости, рассматривая характерные точки:

Ее вид существенно зависит от коэффициента демпфирования (рис. 3.22).
Амплитудно-фазовая характеристика консервативного звена ( =0) начинается в точке к на вещественной оси и при увеличении со стремится  , а затем из
, а затем из  -к началу координат.
-к началу координат.
Амплитудная частотная характеристика строится на основе выражения
и может иметь резонансный пик, высота которого будет тем больше, чем меньше коэффициент демпфирования .
Формула для фазовой частотной характеристики имеет вид
Построение ЛAЧX колебательного звена (при 0 < < 1) осуществляется по соотношению, полученному из (3.48):

При значениях коэффициента демпфирования в интервале 0,3<d<l можно строить упрощенную асимптотическую ЛAЧX. рассматривая отдельно области высоких и низких частот.
В области низких частот  асимптота имеет вид
асимптота имеет вид

В области высоких частот, когда  получим вторую асимптоту (рис. 3.23)
получим вторую асимптоту (рис. 3.23)

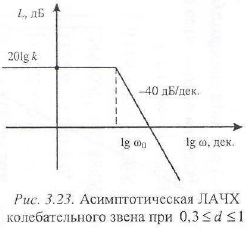
На собственной чистоте колебательного звена  справедливо соотношение
справедливо соотношение

Наибольшее отличие асимптотической ЛАЧХ от действительной характеристики наблюдается на частоте  (рис. 3.24) и зависит от величины коэффициента демпфирования.
(рис. 3.24) и зависит от величины коэффициента демпфирования.
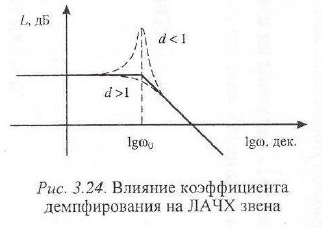
При значениях <0,3 не следует пользоваться асимптотической ЛАЧХ, а нужно строить точную логарифмическую характеристику.
При > 1 корни характеристического уравнения (3.42) будут вещественными и передаточную функцию звена второго порядка (3.41) можно представить в виде произведения двух передаточных функций апериодических звеньев:

где  — постоянные времени апериодических звеньев. В этом случае асимптотическая ЛАЧХ звена второго порядка имеет два «излома» на частотах
— постоянные времени апериодических звеньев. В этом случае асимптотическая ЛАЧХ звена второго порядка имеет два «излома» на частотах  .
.
Она может быть получена суммированием асимптотических ЛАЧХ двух апериодических звеньев.
Готовые задачи по теории автоматического управления (ТАУ)
Теория автоматического управления (ТАУ) появилась во второй половине 19 века сначала как теория регулирования. Широкое применение паровых машин вызвало потребность в регуляторах, то есть в специальных устройствах, поддерживающих устойчивый режим работы паровой машины. Это дало начало научным исследованиям в области управления техническими объектами. Оказалось, что результаты и выводы данной теории могут быть применимы к управлению объектами различной природы с различными принципами действия. В настоящее время сфера ее влияния расширилась на анализ динамики таких систем, как экономические, социальные и т.п. Поэтому прежнее название «Теория автоматического регулирования» заменено на более широкое – «Теория автоматического управления».
Предметом дисциплины «Теория автоматического управления» (ТАУ) является изучение моделей элементов и основных характеристик систем, а также методов анализа и синтеза наиболее распространенных классов систем.
Все системы можно подразделить на материальные и абстрактные. Между ними устанавливаются связи через моделирование.
Под моделью понимают отображение свойств реальной системы в другой системе, реализованной в виде макета или абстрактного описания на ка-ком-либо языке (с помощью дифференциальных уравнений, графов, сетей и т.п.). В своей деятельности люди с помощью моделей изучают различные объекты, которые изначально не удовлетворяют их по своим количественным и качественным характеристикам. Приходится вырабатывать управляющие воздействия на объект, чтобы добиться определенных целей. Так возникает процесс управления. Поскольку управление протекает во времени, то системы управления являются динамическими.
Классическая цепочка в динамической системе управления такова: определение программы управления (планирование) — оценка состояния объекта (контроль) — определение управляющих воздействий (принятие решения) — реализация управления (непосредственное воздействие на объект).
В зависимости от степени автоматизации этих этапов различают автоматизированные системы управления и автоматические системы управления.
В автоматизированных системах управления (АСУ) процесс управления осуществляется частично человеком (принятие решения, контроль, иногда -реализация управления), а частично — автоматическими устройствами.
В системах автоматического управления (САУ) процесс управления осуществляется автоматическими устройствами без непосредственного участия человека на всех этапах рассматриваемой цепочки. Эти системы и будут изучаться в данной дисциплине.
История развития ТАУ связана с созданием высокоточных механизмов, к которым относятся: часы с маятниковым регулятором хода (X. Гюйгенс, 1675); поплавковый регулятор питания котла паровой машины (И. И. Ползунов, 1765); центробежный регулятор скорости паровой машины (Дж. Уатт, 1784); первое программное устройство управления ткацким станком от перфокарты (Ж. Жаккар, 1808) и другие.
Теоретическое осмысление особенностей применения регуляторов было изложено в трудах «О регуляторах» Д. Максвелла (1866) и И. А. Вышнеградского (1876 — 1877). В этот период Раус и Гурвиц разработали математические критерии устойчивости систем.
Двадцатый век явился периодом развития ТАУ. В 1932 г. X. Найквист предложил критерий устойчивости усилителей с обратной связью, а в 1938 г. А. В. Михайлов — критерий устойчивости систем на базе частотных методов.
В 50-е годы XX века В. В. Солодовников завершил формирование частотных методов анализа и синтеза САУ; в трудах А. А. Ляпунова, А. И. Лурье, А. М. Летова, М. А. Айзермана, В. М. Попова разработана теория нелинейных систем.
В 60-е годы прошлого века Я. 3. Цыпкин разработал основы теории дискретных систем; в трудах Г. В. Щипанова, В. С. Кулебакина, Б. Н. Петрова создана теория инвариантных систем; J1. С. Понтрягин, А. А. Фельдбаум, А. А. Красовский разработали принципы экстремального управления и теорию оптимальных систем.
С конца XX века началось внедрение в управление микропроцессоров и микроЭВМ. Появились сложные системы управления производственными процессами, развиваются новые разделы ТАУ, такие как динамика сложных систем, моделирование сложных систем и т.п. В качестве математического аппарата широко используется пространство состояния.
Конспект лекций по дисциплине «Теория автоматического управления» состоит из двух частей. Настоящая первая часть включает материал, описывающий линейные непрерывные системы. Во второй части будут рассмотрены дискретные, нелинейные, адаптивные и оптимальные системы.
Общие сведения о системах автоматического управления
Основными частями системы автоматического управления являются объект управления и управляющее устройство. Объект управления (ОУ) (рис. 1.1, а) — это устройство, в котором протекает процесс, подлежащий управлению.
Координаты  , которыми в объекте управления необходимо управлять, будем называть управляемыми (регулируемыми) координатами (выходные величины). Требуемый режим функционирования объекта управления нарушается из-за воздействия на него возмущений (колебания нагрузки, воздействия внешней среды и т.п.). Сигналы
, которыми в объекте управления необходимо управлять, будем называть управляемыми (регулируемыми) координатами (выходные величины). Требуемый режим функционирования объекта управления нарушается из-за воздействия на него возмущений (колебания нагрузки, воздействия внешней среды и т.п.). Сигналы  , характеризующие действующие на объект возмущения, будем называть возмущающими воздействиями, или просто возмущениями.
, характеризующие действующие на объект возмущения, будем называть возмущающими воздействиями, или просто возмущениями.
Группа величин  носит название управляющих воздействий (сигналов), с помощью которых можно изменять выходные координаты.
носит название управляющих воздействий (сигналов), с помощью которых можно изменять выходные координаты.
На схемах те или иные скалярные сигналы будем обозначать в виде одиночных стрелок, которые указывают направление действия сигнала. Координаты  можно объединить в соответствующие вектора:
можно объединить в соответствующие вектора:  — вектор управления,
— вектор управления,  — вектор возмущения;
— вектор возмущения;  — вектор выхода. В этом случае векторные сигналы изображены в виде двойных стрелок (рис. 1.1,6).
— вектор выхода. В этом случае векторные сигналы изображены в виде двойных стрелок (рис. 1.1,6).
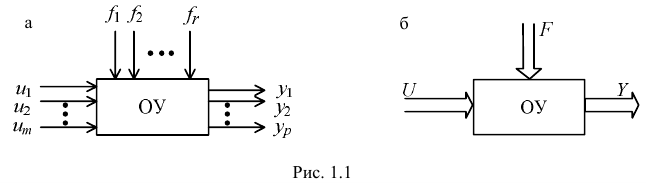
На рис. 1.2 схематично изображено управляющее устройство (УУ), где сигналы представляют собой соответствующие векторы  и
и  .
.
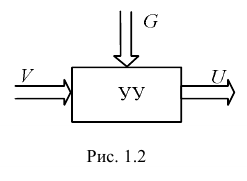
На управляющее устройство также могут действовать некоторые возмущения, характеризуемые вектором  . Роль управляющего устройства — переработка информации, содержащейся в сигналах и и в соответствии с некоторым алгоритмом, зависящим от внутренней структуры управляющего устройства, — выработка управляющих сигналов .
. Роль управляющего устройства — переработка информации, содержащейся в сигналах и и в соответствии с некоторым алгоритмом, зависящим от внутренней структуры управляющего устройства, — выработка управляющих сигналов .
Систему автоматического управления можно представить как совокупность объекта управления и управляющего устройства (рис. 1.3).
Полагаем, что в векторе  учтены возмущения, действующие как на объект управления, так и на управляющее устройство. Штриховыми линиями показана возможность передачи информации об объекте управления и о величинах возмущений на управляющее устройство.
учтены возмущения, действующие как на объект управления, так и на управляющее устройство. Штриховыми линиями показана возможность передачи информации об объекте управления и о величинах возмущений на управляющее устройство.
В основу функционирования систем автоматического управления положены три основных принципа управления.
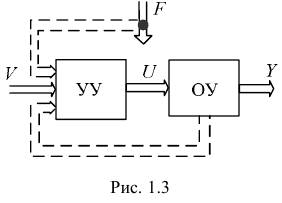
Принцип разомкнутого управления соответствует структуре, изображенной на рис. 1.4. По этому принципу управляющее устройство формирует сигнал управления без учета информации о возмущениях и о результатах управления. Этот простейший принцип применим только в том случае, если возмущения определены и учтены на предварительной стадии при формировании алгоритма управления и объект управления строго исполняет предписанный алгоритм управления.
Второй принцип управления — это принцип компенсации (управление по возмущению). Структура системы управления представлена на рис. 1.5.
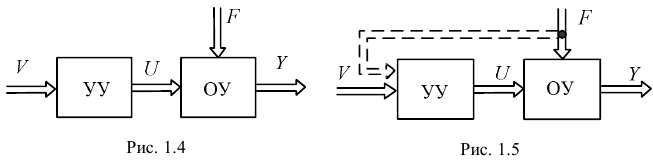
В этом случае вся информация о действующих возмущениях непрерывно поступает на управляющее устройство и учитывается при выработке алгоритма управления. Недостатками этого принципа являются техническая сложность, а иногда невозможность измерить возмущение, а также — отсутствие информации о результатах управления.
Третий принцип управления — принцип обратной связи (управление по отклонению). Структура системы автоматического управления в данном случае представлена на рис. 1.6. В системе существует канал передачи информации о результатах управления — канал обратной связи. При этом косвенно через объект управления учитывается и влияние возмущений на вектор выхода. В этом случае алгоритм управления непрерывно учитывает результаты управления.
Возможно создание систем автоматического управления, использующих второй и третий принципы управления одновременно, — так называемых систем с комбинированным управлением.
На рис. 1.3, 1.5 и 1.6 место разветвления сигналов, обозначенное в виде точки, будем называть узлом.
В большинстве случаев управляющее устройство структурно можно разделить на две части: устройство сравнения  и регулятор
и регулятор  , как показано на рис. 1.7.
, как показано на рис. 1.7.
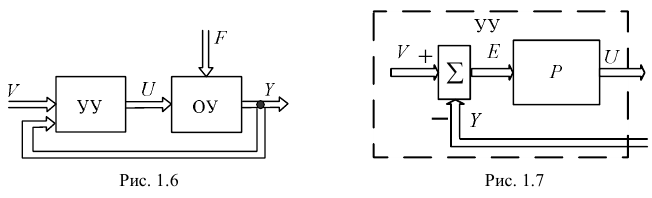
Схематично устройство сравнения (сумматор) будем обозначать в виде прямоугольника со знаком суммирования внутри и при помощи знаков « + » и «-» указывать знак поступающей величины. Тогда на рис. 1.7 алгоритм работы устройства сравнения будет иметь вид  а сигнал
а сигнал  , характеризующий отклонение выходного сигнала от входа сигнала , будем называть сигналом ошибки (сигнал рассогласования, ошибка).
, характеризующий отклонение выходного сигнала от входа сигнала , будем называть сигналом ошибки (сигнал рассогласования, ошибка).
При таком представлении управляющего устройства система управления, построенная по принципу обратной связи, будет иметь вид, изображенный на рис. 1.8.
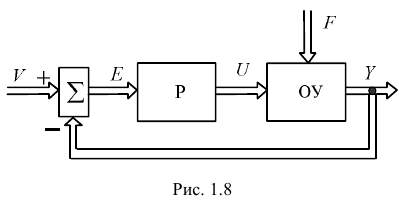
Канал передачи сигнала с выхода объекта управления на вход системы будем называть главной обратной связью системы.
Если — обратная связь отрицательная, если  — положительная.
— положительная.
Классификация систем автоматического управления
Классификацию систем автоматического управления осуществляют в зависимости от признаков, в качестве которых могут быть принципы работы, алгоритмы функционирования, структуры систем, вид представления отдельных элементов, вид математических моделей, области применения и др.
По виду алгоритмов функционирования системы автоматического управления делятся на системы стабилизации (  , поддерживается некоторое постоянное значение выхода , рис. 1.8), системы программного управления (вход должен изменяться по заданной программе), следящие системы — закон изменения входного сигнала неизвестен заранее. Примерами таких систем соответственно являются системы стабилизации скорости вращения и частоты; система автоматического управления промышленного робота, работающая в режиме отработки заданных (программных) движений; радиолокационные следящие системы измерения координат движущегося объекта. С развитием практики и теории автоматического управления появляются новые классы систем: системы с поиском экстремума показателя качества, системы оптимального управления, адаптивные системы.
, поддерживается некоторое постоянное значение выхода , рис. 1.8), системы программного управления (вход должен изменяться по заданной программе), следящие системы — закон изменения входного сигнала неизвестен заранее. Примерами таких систем соответственно являются системы стабилизации скорости вращения и частоты; система автоматического управления промышленного робота, работающая в режиме отработки заданных (программных) движений; радиолокационные следящие системы измерения координат движущегося объекта. С развитием практики и теории автоматического управления появляются новые классы систем: системы с поиском экстремума показателя качества, системы оптимального управления, адаптивные системы.
Приведем классификацию систем по виду законов управления. Под законом управления будем понимать зависимость выходного сигнала регулятора от сигнала ошибки . Для простоты примем, что и — скалярные величины, которые обозначим малыми буквами; тогда в общем случае закон управления будет иметь вид:

Простейшими случаями этого соотношения являются:
где  — коэффициент передачи; а
— коэффициент передачи; а  — постоянные времени.
— постоянные времени.
По количеству управляемых координат системы делятся на одномерные ( ) и многомерные, или многосвязные (
) и многомерные, или многосвязные ( ) (см. рис. 1.1).
) (см. рис. 1.1).
По характеру протекающих процессов системы делятся на непрерывные (все сигналы непрерывны во времени) и импульсные (хотя бы один из сигналов дискретизирован (квантован)) во времени. Если хотя бы один из сигналов в системе является квантованным по уровню, то она относится к релейным системам. При одновременном квантовании сигнала по уровню и времени систему относят к цифровым. Релейные, импульсные и цифровые системы составляют класс дискретных систем автоматического управления.
По зависимости выходных сигналов отдельных элементов от входных системы делятся на линейные и нелинейные.
По виду параметров, характеризующих отдельные элементы и устройства, системы делятся на системы с сосредоточенными или распределенными параметрами, стационарные (все параметры постоянны во времени), нестационарные (параметры изменяются во времени), системы с детерминированными параметрами (закон изменения параметров известен), со случайными (стохастическими) параметрами (заданы их вероятностные характеристики), с неопределенными параметрами (может, например, задаваться только область их изменения).
Приведенная классификация не охватывает всех классов существующих систем. Например, можно выделять еще системы с запаздыванием, системы с перестраиваемой структурой. Адаптивные системы делятся на самонастраивающиеся и самоорганизующиеся.
Примеры систем автоматического управления
Отметим, что первыми промышленными системами автоматического управления считаются регулятор уровня воды в котле паровой машины и центробежный регулятор скорости вращения вала паровой машины.
На рис. 1.9 представлена простейшая структура системы регулирования скорости вращения двигателя постоянного тока, которая содержит объект управления — двигатель (Дв), скорость вращения которого у является управляемой координатой (возмущение  характеризует влияние момента нагрузки на скорость вращения); управляющее устройство включает тахогенератор (Тг), напряжение на выходе которого пропорционально скорости вращения
характеризует влияние момента нагрузки на скорость вращения); управляющее устройство включает тахогенератор (Тг), напряжение на выходе которого пропорционально скорости вращения  ; устройство сравнения
; устройство сравнения  , в качестве которого может применяться суммирующий операционный усилитель или, например, потенциометрический мостик; УП — усилительно-преобразовательные устройства, включающие предварительные усилительные каскады и корректирующие устройства, которые придают системе определенные свойства; УМ — усилитель мощности. Входной сигнал
, в качестве которого может применяться суммирующий операционный усилитель или, например, потенциометрический мостик; УП — усилительно-преобразовательные устройства, включающие предварительные усилительные каскады и корректирующие устройства, которые придают системе определенные свойства; УМ — усилитель мощности. Входной сигнал  в виде напряжения задает режим работы системы. Если
в виде напряжения задает режим работы системы. Если  , то система будет системой стабилизации. Изменяя во времени, можно изменять скорость вращения и систему можно рассматривать как систему программного управления или следящую.
, то система будет системой стабилизации. Изменяя во времени, можно изменять скорость вращения и систему можно рассматривать как систему программного управления или следящую.
Если при заданной величине то на выходе имеем некоторую номинальную скорость  , которой будут соответствовать номинальное значение напряжения тахогенератора
, которой будут соответствовать номинальное значение напряжения тахогенератора  , ошибка
, ошибка  и соответственно напряжение управления
и соответственно напряжение управления  , поддерживающее номинальную скорость вращения. Увеличение момента нагрузки
, поддерживающее номинальную скорость вращения. Увеличение момента нагрузки  приведет к уменьшению величин
приведет к уменьшению величин  и
и  , возрастанию сигнала ошибки
, возрастанию сигнала ошибки  что обусловит увеличение подаваемого напряжения
что обусловит увеличение подаваемого напряжения  на двигатель. Таким образом, скорость возрастет до номинальной (или близкой к номинальной). Если уменьшить, то процесс регулирования будет идти в обратном направлении. Таким образом, происходит автоматическая компенсация влияния нагрузки на скорость двигателя и поддержание скорости в заданных пределах.
на двигатель. Таким образом, скорость возрастет до номинальной (или близкой к номинальной). Если уменьшить, то процесс регулирования будет идти в обратном направлении. Таким образом, происходит автоматическая компенсация влияния нагрузки на скорость двигателя и поддержание скорости в заданных пределах.
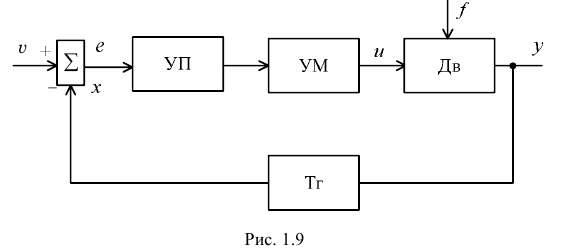
В качестве следующего примера рассмотрим цифровой электропривод, структура которого представлена на рис. 1.10. Управляемой координатой является угол поворота некоторого механизма (М), подключенного к двигателю (Дв) через редуктор (Р) (например одна из степеней подвижности промышленного робота). ДУ — датчик угла, выходом которого является напряжение, пропорциональное углу поворота. Это напряжение поступает на аналого-цифровой преобразователь (АЦП). Сигнал представляет собой цифровой код угла и поступает на микроЭВМ (или микропроцессор). На микроЭВМ поступает (например от ЭВМ более высокого уровня) требуемый код угла поворота. В простейшем случае микроЭВМ производит сравнение сигналов и , т. е. выступает в роли устройства сравнения. В более общем случае микроЭВМ реализует некоторый закон управления (например ПИД-закон) в цифровой форме. Далее сигнал  в цифровом коде поступает на цифроаналоговый преобразователь (ЦАП), после которого через элементы УП и УМ воздействует на двигатель. Такая система может работать в режиме позиционирования, отрабатывая заданный угол , либо в режиме непрерывной отработки угла, изменяющегося по определенной программе.
в цифровом коде поступает на цифроаналоговый преобразователь (ЦАП), после которого через элементы УП и УМ воздействует на двигатель. Такая система может работать в режиме позиционирования, отрабатывая заданный угол , либо в режиме непрерывной отработки угла, изменяющегося по определенной программе.
Существенным отличием этой системы является наличие элементов цифровой техники ЦАП, АЦП, микроЭВМ, для которых характерно квантование сигналов по уровню и по времени.
Математическое описание звеньев систем автоматического управления. Уравнения звеньев
Система автоматического управления (САУ) — это совокупность соединенных в определенной последовательности элементов и устройств, которые будем называть звеньями. Примерами звеньев могут служить объекты управления, усилительно-преобразовательные устройства, исполнительные двигатели, тахогенераторы, различного рода датчики, цифровые устройства, в том числе микропроцессоры и управляющие ЭВМ и т.п.
Под линейной непрерывной стационарной системой с сосредоточенными параметрами будем понимать систему, которая в целом так же, как и отдельные звенья, описывается линейными обыкновенными дифференциальными уравнениями с постоянными коэффициентами.
На рис. 2.1 изображено звено САУ, имеющее один входной  и один выходной
и один выходной  сигналы, являющиеся скалярными величинами (
сигналы, являющиеся скалярными величинами ( , где
, где  — множество действительных или комплексных чисел). В дальнейшем будем интерпретировать все сигналы в системе как функции текущего времени
— множество действительных или комплексных чисел). В дальнейшем будем интерпретировать все сигналы в системе как функции текущего времени  , т. е.
, т. е.  , где
, где  .
.
Получение уравнений, описывающих поведение отдельных звеньев в каждом конкретном случае, является задачей той или иной отрасли науки, например, электротехники, электроники, механики и т.п. и не является предметом данного курса. Поэтому будем полагать, что звено в общем случае описывается дифференциальным уравнением следующего вида:

где
Коэффициенты  зависят от конструктивных параметров и, возможно, от режима работы звена. Порядок
зависят от конструктивных параметров и, возможно, от режима работы звена. Порядок  дифференциального уравнения (2.1) будет определять также и соответствующий порядок звена. На практике звенья описываются дифференциальными уравнениями низкого порядка, обычно
дифференциального уравнения (2.1) будет определять также и соответствующий порядок звена. На практике звенья описываются дифференциальными уравнениями низкого порядка, обычно  .
.
Для полного математического описания процессов в звене следует задавать начальные условия

которые чаще всего будем полагать нулевыми.
В теории автоматического управления наряду с (2.1) уравнения звеньев записывают в стандартной форме, когда координаты при переменных и равны единице. Вынося за скобки  и
и  , имеем
, имеем

или, вводя обозначения

получим следующий вид дифференциального уравнения:

где  — постоянные времени, имеющие размерность [с], а
— постоянные времени, имеющие размерность [с], а  — коэффициент передачи (усиления) имеет размерность [разм. / разм. ].
— коэффициент передачи (усиления) имеет размерность [разм. / разм. ].
Уравнения (2.1) и (2.2) можно записать также в операторном (символическом) виде, вводя дифференциальный оператор

такой, что 
 . Тогда уравнение (2.1) может быть записано в операторной форме:
. Тогда уравнение (2.1) может быть записано в операторной форме:

По виду дифференциального уравнения (2.1) звенья делятся на три типа. Если

то такие звенья относятся к позиционным; если  а
а  , то к дифференцирующим; если
, то к дифференцирующим; если
то к интегрирующим.
Позиционные звенья имеют статическую характеристику. Пусть

тогда

Уравнения (2.1)-(2.3) описывают поведение звеньев в динамических режимах, поэтому в дальнейшем будем называть их уравнениями динамики.
Задача №2.1.
Рассмотрим дифференциальные уравнения часто встречающихся звеньев САУ. В качестве исполнительного устройства в системах управления широко применяются двигатели. Дифференциальное уравнение динамики двигателя постоянного тока при якорном управлении при определенных условиях имеет следующий вид:

где  — электромеханическая и электромагнитная постоянные времени; — коэффициент передачи; — угловая скорость вращения; — напряжение, приложенное к якорю.
— электромеханическая и электромагнитная постоянные времени; — коэффициент передачи; — угловая скорость вращения; — напряжение, приложенное к якорю.
Обозначая

можно получить уравнение в форме (2.2). Дифференциальное уравнение двигателя относительно угла поворота будет

где — угол поворота.
Величины  зависят от конструктивных параметров двигателя. Дифференциальное уравнение тахогенератора может быть записано в виде
зависят от конструктивных параметров двигателя. Дифференциальное уравнение тахогенератора может быть записано в виде  , где — угол поворота вала тахогенератора; — напряжение на его выходе; — коэффициент передачи, определяемый конструктивными параметрами.
, где — угол поворота вала тахогенератора; — напряжение на его выходе; — коэффициент передачи, определяемый конструктивными параметрами.
Линеаризация уравнений динамики звеньев
Реальные устройства САУ обычно являются нелинейными. Однако при определенных условиях их можно заменить линейными моделями, что значительно упрощает исследование САУ. Операция замены нелинейных уравнений линейными носит название линеаризации. Существуют различные способы линеаризации уравнений динамики. Наиболее распространенным является способ, базирующийся на разложении нелинейных функций в ряд Тейлора.
Пусть звено САУ описывается нелинейным дифференциальным уравнением
где — входной, а — выходной сигналы.
Рассмотрим установившийся режим работы звена, когда на входе действует постоянный сигнал  . Тогда существует постоянное значение выходного сигнала
. Тогда существует постоянное значение выходного сигнала  , которое можно найти из уравнения (2.4), полагая
, которое можно найти из уравнения (2.4), полагая  (очевидно,
(очевидно,  ). Связь установившихся значений сигналов
). Связь установившихся значений сигналов  и
и  будет задаваться уравнением установившегося режима
будет задаваться уравнением установившегося режима
из которого при заданном  , можно найти величину
, можно найти величину  .
.
Введем отклонения от установившегося режима

и разложим функцию  в (2.4) в ряд Тейлора относительно координат
в (2.4) в ряд Тейлора относительно координат  :
:

где
и т.д.
Учитывая, что

и ограничиваясь в ряде Тейлора только линейным членом, получим
Уравнение (2.6) является линейным дифференциальным уравнением с постоянными коэффициентами и носит название линеаризованного уравнения.
Приведенной процедуре линеаризации можно дать геометрическую интерпретацию. Уравнение установившегося режима (2.5) определяет нелинейную статическую характеристику звена (рис. 2.2).
Нелинейная функция  в точке разложения с координатами аппроксимируется линейной: касательной в точке разложения.
в точке разложения с координатами аппроксимируется линейной: касательной в точке разложения.
Отметим ряд существенных моментов в процедуре линеаризации.
- Линеаризация допустима, если нелинейная функция в точке разложения является аналитической (т. е. дифференцируема бесконечное число раз). Для звена, имеющего статическую характеристику с разрывом, линеаризация недопустима. САУ, содержащие такие звенья, должны рассматриваться как нелинейные.
- Коэффициенты линеаризованного уравнения (2.6) зависят от координат точки разложения . Изменение координат дает уравнение с другими коэффициентами.
- Линеаризованное уравнение (2.6) и исходное (2.4) будут близки между собой только в окрестности точки разложения. Это соответствие будет тем лучше, чем меньше отклонения координат от установившегося режима и чем ближе нелинейная функция в точке разложения к своей касательной. Дать определенные количественные оценки такой близости затруднительно.
 в точке разложения является аналитической (т. е. дифференцируема бесконечное число раз). Для звена, имеющего статическую характеристику с разрывом, линеаризация недопустима. САУ, содержащие такие звенья, должны рассматриваться как нелинейные.
в точке разложения является аналитической (т. е. дифференцируема бесконечное число раз). Для звена, имеющего статическую характеристику с разрывом, линеаризация недопустима. САУ, содержащие такие звенья, должны рассматриваться как нелинейные. линеаризованного уравнения (2.6) зависят от координат точки разложения
линеаризованного уравнения (2.6) зависят от координат точки разложения  координат от установившегося режима и чем ближе нелинейная функция
координат от установившегося режима и чем ближе нелинейная функция Рассматриваемые далее САУ будем полагать линейными, считая, что их звенья, если это необходимо, на предварительном этапе подверглись процедуре линеаризации.
Задача №2.2.
Пусть звено описывается нелинейным дифференциальным уравнением

Уравнение статики имеет вид  . Положим входной сигнал
. Положим входной сигнал  тогда очевидно, что
тогда очевидно, что  . Линеаризация исходного уравнения дает
. Линеаризация исходного уравнения дает

Если  , то получим уравнение
, то получим уравнение

Таким образом, в зависимости от координат точки разложения будем иметь уравнения с различными коэффициентами.
Передаточная функция и временные характеристики звеньев
Основной характеристикой звена САУ является его дифференциальное уравнение. Однако наряду с ним в теории управления нашли применение и другие характеристики. Важнейшей из них является передаточная функция, получаемая на основе применения преобразования Лапласа к исходному дифференциальному уравнению звена. Прямое и обратное преобразования Лапласа определяются следующими выражениями:

где  оригинал;
оригинал;  — изображение функции
— изображение функции  — комплексная переменная;
— комплексная переменная;  и
и  — символы прямого и обратного преобразования Лапласа.
— символы прямого и обратного преобразования Лапласа.
Наиболее важные свойства преобразования Лапласа, а также соответствие между рядом оригиналов и изображений приведены в приложении.
Если в дифференциальном уравнении звена (2.1) положить


то после применения прямого преобразования Лапласа получим алгебраическое уравнение относительно изображений:


откуда

Передаточная функция звена  есть отношение изображения выходного сигнала к изображению входного сигнала при нулевых начальных условиях.
есть отношение изображения выходного сигнала к изображению входного сигнала при нулевых начальных условиях.
Если взять дифференциальное уравнение звена в операторной форме (2.3), то формально получим делением оператора  на оператор
на оператор  с заменой
с заменой  на
на 
Из (2.7) следует связь изображений входа и выхода через передаточную функцию:

Звено САУ на структурных схемах изображают так, как показано на рис. 2.3.
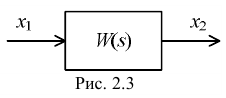
При использовании уравнения (2.2) передаточную функцию звена будем записывать в виде
где  и
и  — многочлены с единичными коэффициентами в младших членах.
— многочлены с единичными коэффициентами в младших членах.
Полином будем называть характеристическим полиномом, а уравнение  — характеристическим уравнением звена.
— характеристическим уравнением звена.
Следующий класс характеристик звена — это временные характеристики: весовая и переходная функции звена.
Если рассматривать как изображение, то приходим к понятию весовой (импульсной) функции звена  , формально определяемой как обратное преобразование Лапласа от передаточной функции
, формально определяемой как обратное преобразование Лапласа от передаточной функции
Весовая функция звена есть реакция звена на входной сигнал в виде дельта-функции, которая определяется соотношением
Дельта-функция обладает фильтрующим свойством:
Если положить

откуда

т. е. — реакция звена на входной сигнал  .
.
К такому же результату можно прийти следующим образом. Правой части (2.8) соответствует в области оригиналов свертка функций и  :
:

Если в (2.11) положить  , то на основании фильтрующего свойства дельта-функции будем иметь
, то на основании фильтрующего свойства дельта-функции будем иметь  .
.
Переходной функцией звена  называется реакция звена на единичное ступенчатое воздействие
называется реакция звена на единичное ступенчатое воздействие
Так как
и по определению
Так как

Задача №2.3.
Дифференциальное уравнение двигателя постоянного тока (пример 2.1) по углу поворота в предположении, что  , можно записать в виде
, можно записать в виде  , где принято
, где принято  .
.
Передаточная функция и временные характеристики будут иметь вид
Частотные характеристики звеньев
Частотные характеристики определяют динамические свойства звеньев при воздействии на них гармонических сигналов. Формально частотные характеристики получаются из передаточной функции  при
при  , где
, где  — угловая частота, имеющая размерность [рад/с]. Сделав такую замену, получим
— угловая частота, имеющая размерность [рад/с]. Сделав такую замену, получим

т. е. частотная передаточная функция  есть прямое преобразование Фурье от весовой функции
есть прямое преобразование Фурье от весовой функции  .
.
Комплекснозначную функцию частоты будем называть амплитудно-фазовой частотной характеристикой (АФЧХ) звена.
Как любое комплексное число АФЧХ можно представить в виде
Если передаточная функция звена представлена в виде
то
При этом, очевидно,
(считаем  ) и
) и

В соответствии с (2.14) — (2.16) имеем еще ряд частотных характеристик:  — амплитудно-частотная характеристика (АЧХ);
— амплитудно-частотная характеристика (АЧХ); 
 — (разово-частотная характеристика (ФЧХ);
— (разово-частотная характеристика (ФЧХ);  — соответственно вещественная и мнимая частотные характеристики.
— соответственно вещественная и мнимая частотные характеристики.
Рассмотрим физический смысл частотных характеристик. Если на вход звена с передаточной функцией  поступает гармонический сигнал
поступает гармонический сигнал  , то в установившемся режиме после затухания переходной составляющей выходной сигнал
, то в установившемся режиме после затухания переходной составляющей выходной сигнал  будет также гармоническим:
будет также гармоническим:

т. е. той же частоты, но измененных амплитуды и фазы.
Изменение амплитуды определяется модулем  , а фазы — аргументом
, а фазы — аргументом  на соответствующей частоте
на соответствующей частоте  .
.
На практике для наглядности частотные характеристики изображают в виде графиков при изменении частоты  от 0 до
от 0 до  .
.
Частотные характеристики обладают следующими свойствами:

которые непосредственно следуют из (2.14) — (2.16). Другими словами: характеристики  являются четными,
являются четными,  — нечетными. В силу этого графики при изменении частоты от
— нечетными. В силу этого графики при изменении частоты от  до 0 не строятся. АФЧХ представляет собой годограф на комплексной плоскости с координатами
до 0 не строятся. АФЧХ представляет собой годограф на комплексной плоскости с координатами  или
или  при изменении от 0 до
при изменении от 0 до  .
.
На рис. 2.4 и 2.5 представлены иллюстративные графики частотных характеристик некоторого звена.
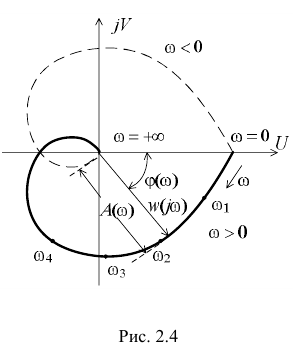
Штриховой линией показаны части графиков, соответствующие <0. Вполне понятно, что из графика (см. рис. 2.4) нетрудно получить графики а, б или соответственно в, г (см. рис. 2.5) и наоборот.
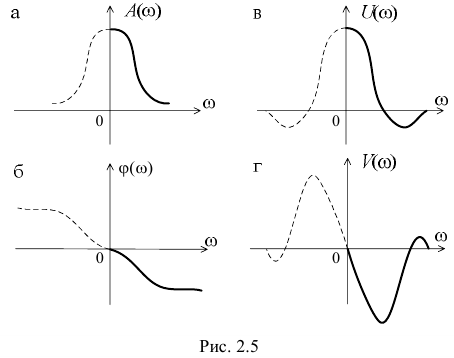
На практике часто применяются соответствующие логарифмические частотные характеристики: логарифмическая амплитудная частотная характеристика (ЛАЧХ)  и логарифмическая фазовая частотная характеристика (ЛФЧХ)
и логарифмическая фазовая частотная характеристика (ЛФЧХ)  , графики которых строятся в логарифмическом масштабе. При построении
, графики которых строятся в логарифмическом масштабе. При построении  по оси ординат откладывается величина
по оси ординат откладывается величина  , единицей измерения которой является децибел, а по оси абсцисс — частота
, единицей измерения которой является децибел, а по оси абсцисс — частота  в логарифмическом масштабе, т. е. величина
в логарифмическом масштабе, т. е. величина  . Увеличение
. Увеличение  в 10 раз соответствует приращению
в 10 раз соответствует приращению  вдоль оси ординат на 20 дБ. При построении ЛФЧХ величину
вдоль оси ординат на 20 дБ. При построении ЛФЧХ величину  откладывают по оси ординат в обычном масштабе (в градусах или радианах), а
откладывают по оси ординат в обычном масштабе (в градусах или радианах), а  — в логарифмическом масштабе.
— в логарифмическом масштабе.
На рис. 2.6 приведены иллюстративные графики ЛAЧX и ЛФЧХ для некоторого звена. Частота  , при которой = 1, носит название частоты среза. Левее значения > 1 (усиление), правее — < 1 (ослабление амплитуды гармонического сигнала).
, при которой = 1, носит название частоты среза. Левее значения > 1 (усиление), правее — < 1 (ослабление амплитуды гармонического сигнала).
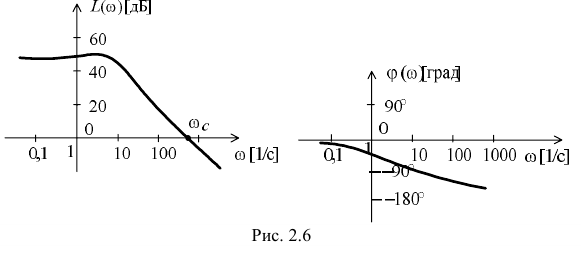
Элементарные звенья и их характеристики
В общем случае звено САУ описывается линейным дифференциальным уравнением произвольного порядка вида (2.1) — (2.3), или соответствующей передаточной функцией (2.7). Введем понятие элементарного звена и покажем, что любое звено может быть представлено в виде совокупности элементарных звеньев.
Передаточная функция (2.7) есть отношение двух полиномов порядка  и
и  соответственно. Каждый из полиномов всегда можно представить в виде про-изведения простых сомножителей вида:
соответственно. Каждый из полиномов всегда можно представить в виде про-изведения простых сомножителей вида:

где сомножитель  соответствует нулевому корню уравнений
соответствует нулевому корню уравнений  или
или

действительному корню,
паре комплексно-сопряженных корней.
Исходя из этого, введем в рассмотрение элементарные звенья со следующими передаточными функциями:


Обозначим произвольную передаточную функцию элементарного звена через  . Нетрудно показать, что звено с передаточной функцией
. Нетрудно показать, что звено с передаточной функцией  можно представить в виде
можно представить в виде

Представление в виде (2.17) оказывается удобным при вычислении и построении соответствующих характеристик звена, если известны характеристики элементарных звеньев. Действительно, из (2.17) нетрудно получить следующие полезные соотношения:

Перейдем к рассмотрению характеристик элементарных звеньев. Идеальное усилительное (безынерционное или пропорциональное) звено. Его уравнение и передаточная функция имеют вид

(полагаем  ), а частотные характеристики —
), а частотные характеристики —


Временные характеристики звена таковы:

Графики частотных и временных характеристик вполне очевидны. Идеальное интегрирующее звено. Дифференциальное уравнение и передаточная функция имеют вид

Характеристики звена определяются следующими выражениями:

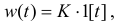
графики которых представлены на рис. 2.7.
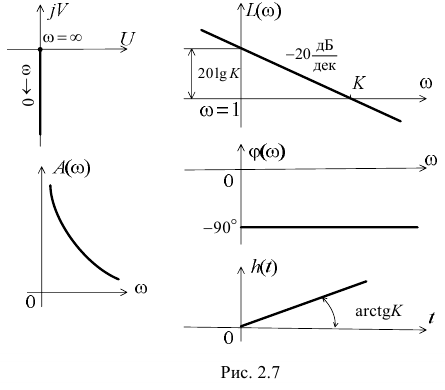
Идеальное дифференцирующеее звено. Звено имеет следующие дифференциальное уравнение и передаточную функцию:

и соответственно характеристики:


графики которых представлены на рис. 2.8.
Апериодическое (инерционное) звено первого порядка. Дифференциальное уравнение звена имеет вид

Передаточная функция и частотные характеристики имеют следующий вид:
Весовая и переходная функции звена определяются выражениями
графики которых представлены на рис. 2.9.
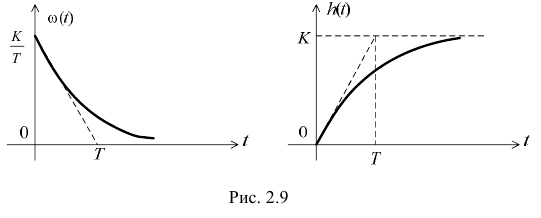
На рис. 2.10 изображены частотные характеристики звена 
 . При этом годограф вектора
. При этом годограф вектора  представляет собой полуокружность.
представляет собой полуокружность.
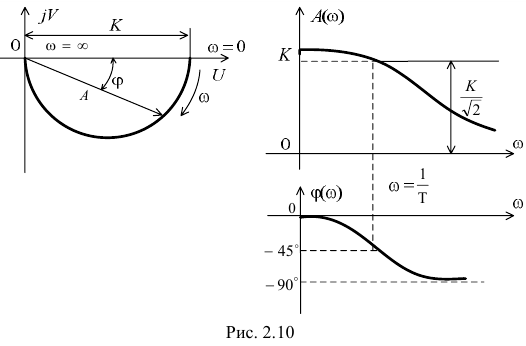
ЛАЧХ может быть построена по приведенному выше выражению по точкам. Однако возможен более простой способ построения приближенной или асимптотической ЛАЧХ в виде отрезков прямых линий с наклонами: 0 до частоты  и -20 дБ на декаду после частоты
и -20 дБ на декаду после частоты  . Соответствующий график приближенной (асимптотической) ЛАЧХ приведен на рис. 2.11, там же представлена и ЛФЧХ.
. Соответствующий график приближенной (асимптотической) ЛАЧХ приведен на рис. 2.11, там же представлена и ЛФЧХ.
Штриховой линией показан точный график  . Максимальная ошибка
. Максимальная ошибка  между точным графиком и асимптотическим будет при и составит
между точным графиком и асимптотическим будет при и составит

что вполне допустимо.
Колебательное звено. Дифференциальное уравнение колебательного эвена имеет вид

Будем полагать, что  , тогда корни характеристического уравнения
, тогда корни характеристического уравнения

будут комплексными. Чаще передаточную функцию звена записывают в виде

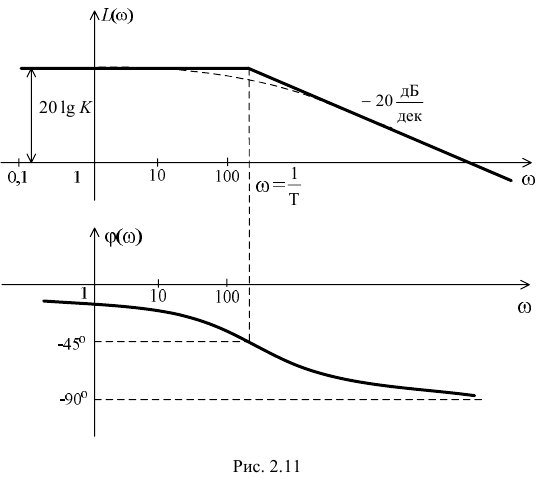
Частотные и временные характеристики звена имеют следующий вид:
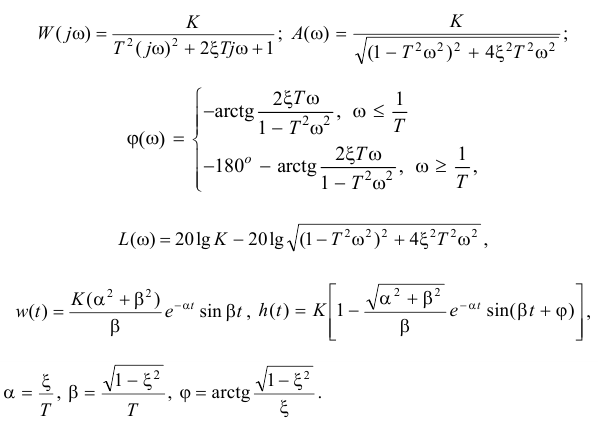
Анализ АЧХ показывает, что  для любого со, если 0,707 <
для любого со, если 0,707 <  < 1. При < 0,707 на графике
< 1. При < 0,707 на графике  появляется «горб», который уходит в бесконечность при
появляется «горб», который уходит в бесконечность при  . Величину называют параметром затухания. Чем меньше , тем медленнее затухает колебательная составляющая в выражениях
. Величину называют параметром затухания. Чем меньше , тем медленнее затухает колебательная составляющая в выражениях  и
и  .
.
Асимптотическая ЛАЧХ в виде ломаной может быть получена только при = 1 и имеет следующий вид:

Переход от прямой с наклоном 0 дБ/дек на прямую с наклоном -40 дБ/дек происходит по частоте излома . Считается, что такую аппроксимацию можно использовать при 0,5 < < 1. При < 0,5 в окрестностях точки на ЛАЧХ также появляется «горб». В этом случае при построении в диапазоне  , близких к , следует использовать точное выражение для или воспользоваться специальными номограммами.
, близких к , следует использовать точное выражение для или воспользоваться специальными номограммами.
Графики частотных характеристик колебательного звена приведены на рис. 2.12, а временных характеристик — на рис. 2.13.
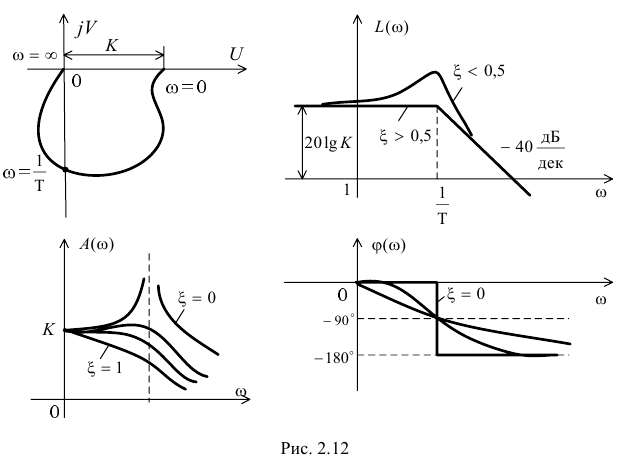
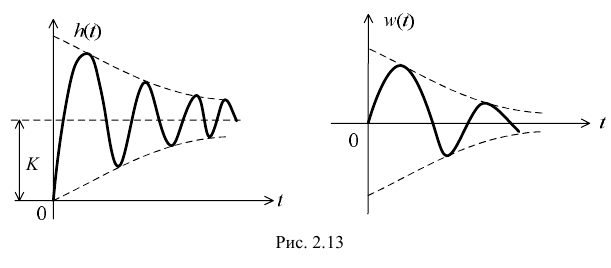
Частные случаи колебательного звена: консервативное звено при = 0, имеющее передаточную функцию
и апериодическое звено второго порядка при  , передаточная функция которого равна
, передаточная функция которого равна

Форсирующее звено первого порядка. Дифференциальное уравнение и передаточная функция звена имеют вид

а частотные и временные характеристики определяются выражениями

Графики частотных характеристик представлены на рис. 2.14. Форсирующее звено второго порядка. Диффференциальное уравнение и передаточная функция равны соответственно


при условии  . При
. При  это звено можно представить как произведение двух элементарных форсирующих звеньев первого порядка.
это звено можно представить как произведение двух элементарных форсирующих звеньев первого порядка.
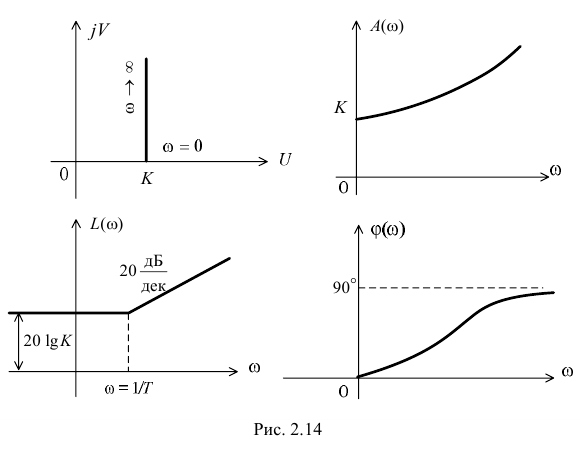
Особенности и физическая реализуемость звеньев
Пусть звено имеет передаточную функцию
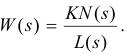
Если нули передаточной функции (корни уравнения  ) и полюса передаточной функции (корни уравнения
) и полюса передаточной функции (корни уравнения  ) имеют действительные части, отрицательные или равные нулю, то такое звено будем называть звеном минимально-фазового типа. При наличии хотя бы одного нуля или полюса с положительной вещественной частью звено будет относиться к неминимально-фазовому типу.
) имеют действительные части, отрицательные или равные нулю, то такое звено будем называть звеном минимально-фазового типа. При наличии хотя бы одного нуля или полюса с положительной вещественной частью звено будет относиться к неминимально-фазовому типу.
Рассмотрим эти звенья на простейшем примере. Для звена с передаточной функцией
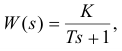
которое является минимально-фазовым,

Звено с передаточной функцией
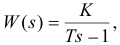
являющееся неминимально-фазовым, имеет частотные характеристики

Таким образом, при одинаковых АЧХ неминимально-фазовое звено имеет больший по модулю фазовый сдвиг.
Указанное свойство справедливо и в общем случае.
Рассмотрим еще одно важное свойство звеньев — свойство физической реализуемости.
Для любого реального устройства АЧХ с увеличением частоты должна уменьшаться и стремиться к нулю, а фазовые сдвиги на высоких частотах должны быть отрицательными. Пусть полином числителя  передаточной функции
передаточной функции  имеет порядок
имеет порядок  , а полином знаменателя
, а полином знаменателя  — порядок
— порядок  . Тогда для минимально-фазового звена справедливы следующие соотношения:
. Тогда для минимально-фазового звена справедливы следующие соотношения:

Из приведенных соотношений следует, что звено является физически реализуемым, если будет выполняться соотношение  .
.
С этой точки зрения, например, идеальное дифференцирующее звено с передаточной функцией  не является физически реализуемым. Реальное звено, осуществляющее операции дифференцирования, может быть аппроксимировано передаточной функцией в некотором ограниченном диапазоне частот.
не является физически реализуемым. Реальное звено, осуществляющее операции дифференцирования, может быть аппроксимировано передаточной функцией в некотором ограниченном диапазоне частот.
Математическое описание систем автоматического управления. Структурные схемы и структурные преобразования
Графически системы автоматического управления представляют в виде структурных схем, которые разделяют на конструктивные, функциональные и алгоритмические. В случае конструктивных схем блок является законченным техническим устройством (двигатель, усилитель, тахогенератор и т. п.). В функциональных схемах блок представляет собой один или несколько элементов, осуществляющих какую-либо функцию (усиления, преобразования, сбора информации и т. п.). Часто конструктивные блоки могут совпадать с функциональными.
При математическом описании систем управления распространение получили алгоритмические структурные схемы, составной частью которых являются звенья систем. Характеристикой звена является его математическое описание в виде дифференциального уравнения, передаточной функции или другой характеристики. Наиболее часто такой характеристикой является передаточная функция, которая записывается внутри прямоугольника, изображающего звено на структурной схеме.
Таким образом, алгоритмические структурные схемы, которые в основном в дальнейшем будем использовать и называть просто структурными схемами, являются графической интерпретацией математической модели системы управления.
В процессе исследования структурные схемы подвергаются преобразованию: некоторые звенья могут объединяться в одно звено, другие, наоборот, подвергаются расчленению. Такие преобразования носят название структурных преобразований, которые фактически соответствуют преобразованиям математических моделей. В результате таких преобразований конечная структурная схема может сильно отличаться от исходной, а тем более от функциональной или конструктивной схемы.
Одним из результирующих итогов структурных преобразований является приведение произвольной структуры системы к некоторому стандартному виду. Структурная схема такой стандартной системы автоматического управления представлена на рис. 3.1, где  — передаточная функция объекта управления,
— передаточная функция объекта управления,  — передаточная функция регулятора,
— передаточная функция регулятора,  — входной сигнал,
— входной сигнал,  — возмущающий,
— возмущающий,  — выходной сигнал,
— выходной сигнал,  — сигнал рассогласования. Единичная обратная связь в такой системе называется главной обратной связью.
— сигнал рассогласования. Единичная обратная связь в такой системе называется главной обратной связью.
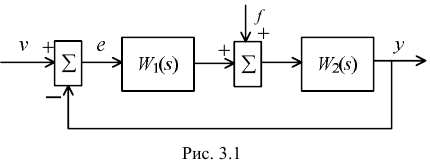
На структурных схемах сигналы следует рассматривать как изображения по Лапласу соответствующих переменных.
Рассмотрим преобразование произвольной структуры к стандартному виду, которое осуществляется на основании правил структурных преобразований. Анализ структур систем автоматического управления показывает, что существует три основных вида соединения звеньев: последовательное, параллельное и соединение с помощью обратной связи.
Структурные схемы, соответствующие указанным типам соединений, представлены на рис. 3.2, а, б, в.
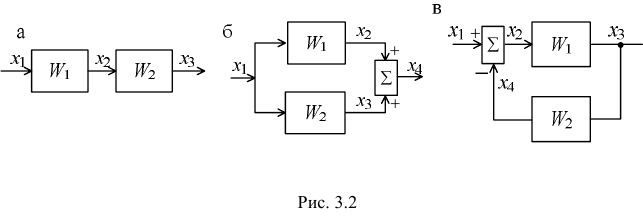
Отметим, что в дальнейшем, если это ясно из контекста, символ s в записи передаточных функций будем иногда опускать.
Рассмотрим задачу объединения звеньев в одно звено, связывающее непосредственно вход и выход соответствующего соединения.
Для последовательного соединения (см. рис. 3.2, а) можно записать:

Исключая промежуточную величину  , получим
, получим

Итак, при последовательном соединении общая передаточная функция соединения будет равна произведению передаточных функций звеньев:

Если последовательно соединено  звеньев, то аналогично
звеньев, то аналогично
Для параллельного соединения (см. рис. 3.2, б) уравнения, связывающие координаты, имеют вид

Исключая величины  из этих уравнений, получим
из этих уравнений, получим

т. е. общая передаточная функция соединения будет равна сумме передаточных функций звеньев. В случае последовательного соединения звеньев получим
Уравнения, связывающие переменные при соединении звеньев с помощью обратной связи (рис. 3.2, в), имеют вид


откуда, исключая переменные
получим

т.е. общая передаточная функция соединения будет равна
Если звенья соединены с помощью положительной обратной связи, то
Наряду с объединением звеньев при структурных преобразованиях приходится прибегать к переносу отдельных узлов или сумматоров из одних участков структурной схемы в другие. Такие переносы изображены на рис. 3.3, где слева — исходная схема, а справа — структурная схема после соответствующего переноса узла или сумматора. Нетрудно видеть, что по отношению к сигналам входа и выхода исходная и преобразованная структурные схемы эквивалентны.
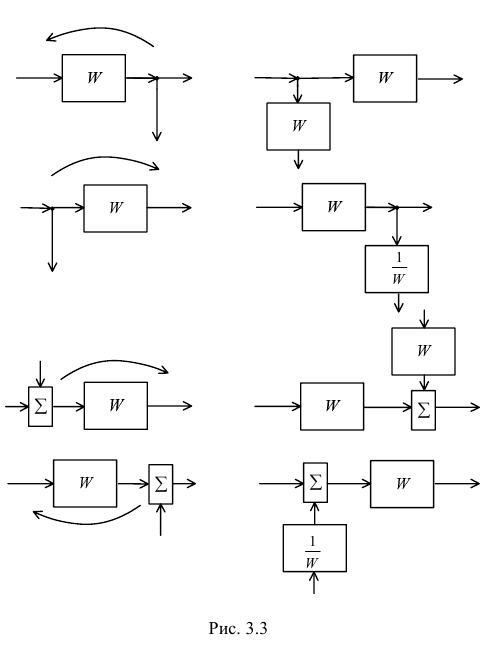
На практике существует и другая задача — расчленения отдельного звена на более простые. Примером решения такой задачи может служить представление передаточной функции звена в виде суммы или произведения передаточных функций элементарных звеньев.
Задача №3.1.
Рассмотрим систему управления, структурная схема которой представлена на рис. 3.4, а. Последовательность преобразования структуры следующая: переносим сумматор  через звено
через звено  и через сумматор
и через сумматор  . Далее объединим звенья до точки приложения воздействия
. Далее объединим звенья до точки приложения воздействия  и после нее. В результате будем иметь структуру, представленную на рис. 3.4, б.
и после нее. В результате будем иметь структуру, представленную на рис. 3.4, б.
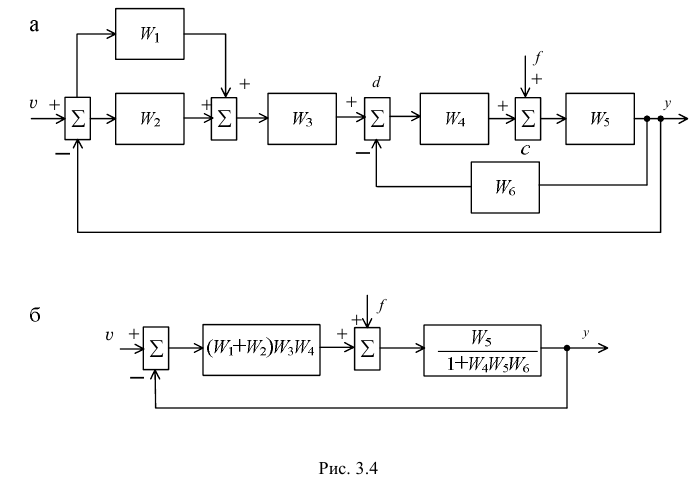
Передаточные функции и уравнения систем
Рассмотрим структурную схему стандартной системы автоматического управления, представленную на рис. 3.1. Обозначим произведение передаточных функций 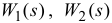 через
через  . Эту передаточную функцию будем называть передаточной функцией разомкнутой системы, которая связывает изображение выходного сигнала
. Эту передаточную функцию будем называть передаточной функцией разомкнутой системы, которая связывает изображение выходного сигнала  и входа
и входа  при размыкании цепи главной обратной связи и при
при размыкании цепи главной обратной связи и при  .
.
Передаточная функция (как любая передаточная функция линейной системы или звена) есть отношение двух полиномов вида
где

Для физически реализуемых систем должно выполняться условие:  . Величину
. Величину  будем называть коэффициентом передачи (усиления) разомкнутой системы. Полином
будем называть коэффициентом передачи (усиления) разомкнутой системы. Полином  назовем характеристическим полиномом разомкнутой системы, а алгебраическое уравнение
назовем характеристическим полиномом разомкнутой системы, а алгебраическое уравнение  -й степени
-й степени  , где
, где  — комплексная переменная, будем называть характеристическим уравнением разомкнутой системы.
— комплексная переменная, будем называть характеристическим уравнением разомкнутой системы.
Если не содержит нулевых корней, то систему управления будем называть статической по отношению к управляющему воздействию. Очевидно,  .
.
При наличии нулевых корней передаточную функцию (3.1) можно представить в виде
где  не имеет нулевых корней;
не имеет нулевых корней;  — количество нулевых корней уравнения , т. е. говорят, что передаточная функция содержит
— количество нулевых корней уравнения , т. е. говорят, что передаточная функция содержит  -й степени в чистом виде.
-й степени в чистом виде.
Систему управления с передаточной функцией вида (3.2) будем называть астатической с астатизмом -го порядка по отношению к управляющему воздействию. Очевидно, (3.1) есть частный случай (3.2) при = 0.
Перейдем к рассмотрению характеристик замкнутой системы (рис. 3.1), для которой можно из структурной схемы записать следующие уравнения:

Из (3.3) нетрудно определить эти связи:

Обозначим

Передаточную функцию  назовем главной передаточной функцией замкнутой системы,
назовем главной передаточной функцией замкнутой системы,  — передаточной функцией замкнутой системы по возмущению,
— передаточной функцией замкнутой системы по возмущению,  — передаточной функцией замкнутой системы по ошибке. Если
— передаточной функцией замкнутой системы по ошибке. Если  представлена в виде (3.1), то
представлена в виде (3.1), то

где полином  , a
, a  — полином, который получается в результате перемножения
— полином, который получается в результате перемножения  и
и  .
.
Полином  носит название характеристического полинома замкнутой системы, а уравнение
носит название характеристического полинома замкнутой системы, а уравнение  — характеристического уравнения замкнутой системы. Степень полинома
— характеристического уравнения замкнутой системы. Степень полинома  определяется величиной
определяется величиной  (если
(если  ) или
) или  (если
(если  ). Для физически реализуемой разомкнутой системы степень полинома равна .
). Для физически реализуемой разомкнутой системы степень полинома равна .
Важной характеристикой замкнутой системы является ее дифференциальное уравнение. Из уравнения

заменяя  и
и  выражениями (3.4), получим
выражениями (3.4), получим

и, переходя к оригиналам (или формально заменяя  на оператор дифференцирования
на оператор дифференцирования  ), имеем следующее дифференциальное уравнение замкнутой системы:
), имеем следующее дифференциальное уравнение замкнутой системы:

Порядок дифференциального уравнения (порядок полинома ) будем называть порядком системы.
Уравнение (3.5) описывает поведение системы в динамическом режиме, частным случаем которого является установившийся или статический режим. Полагая в (3.5) величины  , а производные этих величин равными нулю, что соответствует
, а производные этих величин равными нулю, что соответствует  в полиномах
в полиномах  получим уравнение статического режима:
получим уравнение статического режима:

Величина  a
a  для астатических систем и
для астатических систем и  -для статических систем. Таким образом, имеем следующие уравнения статического режима:
-для статических систем. Таким образом, имеем следующие уравнения статического режима:  при
при  при
при  .
.
Значение величины  зависит от вида передаточных функций
зависит от вида передаточных функций  .
.
По аналогии со звеньями систем можно ввести временные характеристики замкнутой системы, используя соответствующие передаточные функции  ,
,  или
или  . Оригинал
. Оригинал  передаточной функции замкнутой системы относительно входа
передаточной функции замкнутой системы относительно входа  и выхода
и выхода  определится как
определится как  , а переходная функция как
, а переходная функция как  .
.
Аналогично можно определить эти характеристики, используя и .
Задача №3.2.
Пусть задана структурная схема системы (см. рис. 3.1), где

Используя результаты, приведенные выше, определяем основные характеристики системы:
Дифференциальное уравнение замкнутой системы (3.5) примет вид:

Система является системой с астатизмом первого порядка, порядок системы равен трем.
Частотные характеристики систем
Частотные методы анализа и синтеза систем управления находят широкое применение в инженерной практике. По аналогии с частотными характеристиками звеньев можно ввести соответствующие частотные характеристики для системы автоматического управления.
Важным классом частотных характеристик являются частотные характеристики разомкнутой системы, определяемые из передаточной функции  . Это амплитудно-фазовая частотная характеристика
. Это амплитудно-фазовая частотная характеристика


 — соответственно вещественная и мнимая частотные характеристики,
— соответственно вещественная и мнимая частотные характеристики,  — логарифмическая амплитудная частотная характеристика разомкнутой системы.
— логарифмическая амплитудная частотная характеристика разомкнутой системы.
Отметим некоторые общие свойства частотных характеристик для систем минимально-фазового типа. Пусть
и степень полинома числителя меньше степени полинома знаменателя , тогда
При этом годограф  на комплексной плоскости при
на комплексной плоскости при  стремится к началу координат, при
стремится к началу координат, при  для статической системы он начинается на действительной оси на расстоянии
для статической системы он начинается на действительной оси на расстоянии  от начала координат, а для астатических систем при
от начала координат, а для астатических систем при  уходит в бесконечность в третьем квадранте при
уходит в бесконечность в третьем квадранте при  = 1, во втором квадранте при = 2, в первом квадранте при = 3 и т.д. по часовой стрелке.
= 1, во втором квадранте при = 2, в первом квадранте при = 3 и т.д. по часовой стрелке.
При построении частотных характеристик разомкнутой системы полезно представить  в виде произведения передаточных функций
в виде произведения передаточных функций  элементарных звеньев (см. подразд. 2.5), т.е.
элементарных звеньев (см. подразд. 2.5), т.е.
В этом случае

что может существенно облегчить вычисление и построение характеристик. Если
то каждую элементарную характеристику  строят в виде отрезков ломаных
строят в виде отрезков ломаных
(асимптот) и далее производят суммирование. Отметим, что первая низкочастотная асимптота определяется выражением  — это есть прямая с наклоном
— это есть прямая с наклоном  , проходящая при
, проходящая при  через точку с координатой
через точку с координатой  .
.
Рассмотрим теперь частотные характеристики замкнутой системы. Их можно получить по передаточным функциям замкнутой системы 
 . Чаще всего рассматривают частотные характеристики на базе главной передаточной функции замкнутой системы
. Чаще всего рассматривают частотные характеристики на базе главной передаточной функции замкнутой системы  . Из них обычно используются
. Из них обычно используются

вещественная частотная характеристика замкнутой системы.
Остановимся на основных свойствах  и
и  . Для физически реализуемых систем
. Для физически реализуемых систем

Начальные значения этих характеристик будут таковы:
Между частотными характеристиками разомкнутой и замкнутой системы существует однозначная связь, которая следует из выражения
Представляя

из (3.7) можно получить следующие выражения:
Эти выражения можно использовать для вычисления частотных характеристик замкнутой системы по частотным характеристикам разомкнутой. Существуют специальные номограммы, решающие такие задачи графически.
Процессы в системах автоматического управления
Динамические процессы в стандартной системе автоматического управления, структурная схема которой приведена на рис. 3.1, описываются во временной области дифференциальным уравнением

или в области изображений выражением

Выходной сигнал  замкнутой системы, являющийся решением линейного дифференциального уравнения (4.1), может возникнуть в системе либо за счет внешних воздействий
замкнутой системы, являющийся решением линейного дифференциального уравнения (4.1), может возникнуть в системе либо за счет внешних воздействий  или
или  , либо за счет вариации начальных условий переменной и ее производных. Составляющую выходного сигнала, обусловленную ненулевыми начальными условиями переменной и ее производных, будем называть свободной и обозначать
, либо за счет вариации начальных условий переменной и ее производных. Составляющую выходного сигнала, обусловленную ненулевыми начальными условиями переменной и ее производных, будем называть свободной и обозначать  , а составляющие, обусловленные сигналами и , — вынужденными и обозначать соответственно
, а составляющие, обусловленные сигналами и , — вынужденными и обозначать соответственно  и
и  . Тогда процесс , являющийся решением линейного дифференциального уравнения (4.1), определяется выражением
. Тогда процесс , являющийся решением линейного дифференциального уравнения (4.1), определяется выражением

где

В математике называют общим решением уравнения (4.1) без правой части (однородного уравнения), a  — частным решением уравнения (4.1) с правой частью (неоднородного уравнения).
— частным решением уравнения (4.1) с правой частью (неоднородного уравнения).
Общее решение однородного уравнения в случае простых (различных) корней характеристического уравнения  , которые обозначим через
, которые обозначим через  , определяется выражением
, определяется выражением

где  — произвольные постоянные, определяемые через начальные условия
— произвольные постоянные, определяемые через начальные условия

Если характеристическое уравнение имеет один кратный корень, например,  кратности
кратности  , а остальные
, а остальные  — простые, то общее решение будет иметь вид
— простые, то общее решение будет иметь вид

В случае нескольких кратных корней в свободной составляющей будут появляться аналогичные группы слагаемых, соответствующие каждому кратному корню.
Для вычисления вынужденной составляющей обратимся к уравнению относительно изображений (4.2). Обозначим весовые функции замкнутой системы по управляющему сигналу
и по возмущению

тогда переходя в (4.2) к оригиналам, с учетом того, что произведение изображений есть свертка во временной области, получим

Таким образом, полное решение дифференциального уравнения будет иметь вид

В случае нулевых начальных условий

все

и (4.7) превращается в соотношение (4.6).
При исследовании систем управления обычно ограничиваются внешними воздействиями определенного типа, что дает возможность ввести некоторые показатели качества процессов управления и оказывается удобным для сравнительного анализа проектируемых систем. Наиболее часто сигнал управления (то же самое и для возмущения ) задают в виде типового сигнала следующего вида:
 — дельта-функция;
— дельта-функция;
 — ступенчатая функция амплитуды
— ступенчатая функция амплитуды  (скачок по положению);
(скачок по положению);
 — скачок по скорости;
— скачок по скорости;
 — скачок по ускорению’,
— скачок по ускорению’,
 — полиномиальное воздействие;
— полиномиальное воздействие;
 — гармоническое воздействие, где
— гармоническое воздействие, где  амплитуда,
амплитуда,  — фаза,
— фаза,  — частота;
— частота;
 — гармоническое воздействие в комплексной форме.
— гармоническое воздействие в комплексной форме.
В этих выражениях сигналы определены при  > 0 и равны нулю при < 0, a
> 0 и равны нулю при < 0, a

Выбор того или иного сигнала зависит от вида системы и условий ее функционирования. Например, для систем стабилизации наиболее естественной формой управляющего воздействия является ступенчатая функция. Для следящих систем таковыми являются сигналы гармонического типа.
Наиболее часто динамические свойства системы оцениваются по ее реакции на единичную ступенчатую функцию  , т. е. по виду выходного сигнала
, т. е. по виду выходного сигнала  , являющегося переходной функцией замкнутой системы
, являющегося переходной функцией замкнутой системы  .
.
На рис. 4.1 представлен наиболее типичный вид переходной функции  , где
, где  — установившееся значение выходной координаты.
— установившееся значение выходной координаты.
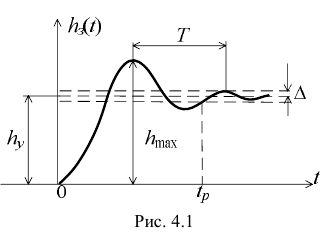
Для оценки качества регулирования по виду вводят следующие показатели качества:
 — время регулирования (время переходного процесса), это время,
— время регулирования (время переходного процесса), это время,
после которого величина
где обычно  от ;
от ;

перерегулирование в процентах;

частота колебаний переходного процесса;
число колебаний за время переходного процесса.
Наиболее важными показателями качества являются  и
и  . Величина может изменяться в широких пределах в зависимости от вида системы управления. Перерегулирование обычно лежит в пределах от 0 до 30%. Число колебаний за время регулирования обычно 1 — 2, а иногда 3 — 4. В некоторых случаях колебания недопустимы.
. Величина может изменяться в широких пределах в зависимости от вида системы управления. Перерегулирование обычно лежит в пределах от 0 до 30%. Число колебаний за время регулирования обычно 1 — 2, а иногда 3 — 4. В некоторых случаях колебания недопустимы.
По виду функции процессы делятся на три категории (рис. 4.2): монотонные (1), апериодические (2) и колебательные (3).
У монотонных процессов  не меняет знак, у апериодического процесса знак производной изменяется только один раз, у колебательного — бесконечное число раз.
не меняет знак, у апериодического процесса знак производной изменяется только один раз, у колебательного — бесконечное число раз.
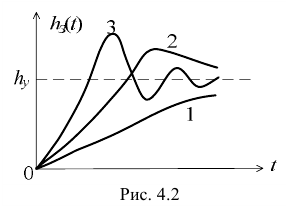
Вычисление процессов в замкнутой системе фактически представляет собой задачу решения дифференциального уравнения (4.1) при заданных входных воздействиях  и
и  и начальных условиях. Существующие методы решения этой задачи можно разбить на две категории: аналитические методы и методы моделирования на ПЭВМ.
и начальных условиях. Существующие методы решения этой задачи можно разбить на две категории: аналитические методы и методы моделирования на ПЭВМ.
Задача №4.1.
В системе (см. рис. 3.1) будем полагать


где  и
и  имеют соответствующую размерность.
имеют соответствующую размерность.
Найдем выражение, связывающее выходной сигнал  с внешними воздействиями
с внешними воздействиями  и
и  Для определения свободной составляющей (произвольных
Для определения свободной составляющей (произвольных  ) воспользуемся операционным методом решения дифференциального уравнения.
) воспользуемся операционным методом решения дифференциального уравнения.
Выражение (4.2) будет иметь вид

из которого дифференциальное уравнение замкнутой системы (4.1) будет

Будем полагать начальные условия для выходного сигнала  ненулевыми, а для входных сигналов — нулевыми. Применим к дифференциальному уравнению преобразование Лапласа.
ненулевыми, а для входных сигналов — нулевыми. Применим к дифференциальному уравнению преобразование Лапласа.

откуда

Полученное выражение отличается от первоначального в этом примере наличием членов, учитывающих ненулевые начальные условия. С учетом заданных параметров  будем иметь
будем иметь

Применяя обратное преобразование Лапласа, получим в области оригиналов
Аналитические методы вычисления процессов
Аналитические методы вычисления выходного сигнала замкнутой системы базируются на известных методиках решения дифференциальных уравнений. Решение (4.1) классическими методами во временной области приводит к соотношению (4.7). Зная  , внешние воздействия
, внешние воздействия  и интегрируя (4.7), можно вычислить реакцию системы
и интегрируя (4.7), можно вычислить реакцию системы  . Такой подход редко используется в практике теории управления, а выражение (4.7) в большей степени применяется в теоретических выкладках.
. Такой подход редко используется в практике теории управления, а выражение (4.7) в большей степени применяется в теоретических выкладках.
На практике решение уравнения (4.1) чаще всего осуществляют с помощью операционного исчисления на базе преобразования Лапласа, т. е. за основу принимают выражение (4.2).
Рассмотрим методику вычисления реакции системы на внешнее воздействие  при нулевых начальных условиях координаты
при нулевых начальных условиях координаты  и ее производных. В этом случае связь изображений входа и выхода будет иметь вид
и ее производных. В этом случае связь изображений входа и выхода будет иметь вид
где в общем случае

 — полиномы степени
— полиномы степени  соответственно.
соответственно.
Вычисление составляющей  обусловленной возмущением
обусловленной возмущением  , будет аналогичным с использованием передаточной функции
, будет аналогичным с использованием передаточной функции  .
.
В (4.8) изображение  для большинства типовых воздействий представляет собой дробно-рациональную функцию, т. е. также является отношением некоторых полиномов относительно
для большинства типовых воздействий представляет собой дробно-рациональную функцию, т. е. также является отношением некоторых полиномов относительно  . Таким образом, изображение
. Таким образом, изображение  в этом случае будет иметь следующий вид:
в этом случае будет иметь следующий вид:
где степень полинома  меньше степени полинома
меньше степени полинома  , которую обозначим через
, которую обозначим через  и в общем случае
и в общем случае  .
.
Вычисление оригинала  по его изображению осуществляется по формулам разложения Хевисайда. Если полюса изображения , являющиеся корнями уравнения
по его изображению осуществляется по формулам разложения Хевисайда. Если полюса изображения , являющиеся корнями уравнения  , которые обозначим
, которые обозначим  , являются различными, то оригинал определяется выражением
, являются различными, то оригинал определяется выражением

В случае кратных полюсов для вычисления оригинала используется выражение на основе вычетов [6].
Если входной сигнал
а изображение реакции системы в соответствии с (4.8) примет такой вид:
Реакция системы в этом случае будет не чем иным, как переходной функцией замкнутой системы  , которая как частный случай (4.9) будет вычисляться по выражению
, которая как частный случай (4.9) будет вычисляться по выражению
где  — различные корни характеристического уравнения замкнутой системы.
— различные корни характеристического уравнения замкнутой системы.
Следует отметить, что случай кратных корней при исследовании систем управления встречается сравнительно редко.
В (4.10)  характеризует так называемую установившуюся составляющую, а
характеризует так называемую установившуюся составляющую, а  — переходную составляющую. И в общем случае в (4.9) для произвольного процесса
— переходную составляющую. И в общем случае в (4.9) для произвольного процесса  можно всегда выделить две составляющие: установившуюся
можно всегда выделить две составляющие: установившуюся  и переходную
и переходную  . Частным случаем установившейся составляющей является случай, соответствующий
. Частным случаем установившейся составляющей является случай, соответствующий  , которую будем называть статической составляющей. Для асимптотически устойчивых систем (это понятие будем рассматривать в разд. 5) всегда
, которую будем называть статической составляющей. Для асимптотически устойчивых систем (это понятие будем рассматривать в разд. 5) всегда
и при больших значениях  реакция системы
реакция системы  .
.
Отметим, что так как в (4.10)  — это постоянные величины, то структура переходной составляющей идентична структуре свободной составляющей
— это постоянные величины, то структура переходной составляющей идентична структуре свободной составляющей  (4.4).
(4.4).
Реакция системы на входной сигнал при нулевых начальных условиях определяется выражением
Для вычисления установившейся составляющей можно воспользоваться выражением [1]:

При гармоническом входном сигнале для вычисления установившейся составляющей можно использовать частотные характеристики системы. Пусть на входе системы  , тогда установившееся значение выходного сигнала будет также гармоническим сигналом и может быть вычислено по выражению
, тогда установившееся значение выходного сигнала будет также гармоническим сигналом и может быть вычислено по выражению

где  — значение АЧХ, а
— значение АЧХ, а  — значение ФЧХ замкнутой системы при
— значение ФЧХ замкнутой системы при  .
.
Задача №4.2.
Рассмотрим систему управления, структура которой представлена на рис. 3.1. Как и в предыдущем примере,
Пусть

Входной сигнал 
С учетом изображения входного сигнала  найдем
найдем
Используя (4.10) с учетом того, что характеристическое уравнение

имеет два различных корня

получим

Из полученного выражения следует, что переходная составляющая с течением времени затухает, а установившаяся — постоянна и равна единице.
Вычислим установившуюся составляющую выходного сигнала при гармоническом входном сигнале


Передаточная функция имеет вид
откуда, заменяя  на
на  , получим
, получим

При  значения
значения

Таким образом, установившееся значение выходного сигнала будет равно
Применение аналитических методов на практике ограничено из-за необходимости вычисления корней характеристического уравнения, построения по найденному аналитическому выражению переходной функции, нахождения показателей качества системы ( и др.). Чтобы обойти эти трудности, были разработаны приближенные графические методы построения переходной функции, вытекающие из связи
и др.). Чтобы обойти эти трудности, были разработаны приближенные графические методы построения переходной функции, вытекающие из связи  с вещественной частотной характеристикой замкнутой системы
с вещественной частотной характеристикой замкнутой системы  :
:
Выражение (4.13) положено в основу приближенных графических методов построения . Суть этих методов заключается в аппроксимации характеристик и вычислении соответствующих составляющих переходного процесса. Например, Вороновым А. А. был предложен метод аппроксимации с помощью треугольных, а Солодовниковым В. В. — с помощью трапецеидальных характеристик.
Однако в связи с развитием вычислительной техники в настоящее время графо-аналитический метод вычисления переходной функции утратил свое прежнее значение. Переходной процесс любой САУ легко строится в Matlab с помощью стандартных функций или с использованием средства Simulink после создания соответствующей математической модели исследуемой системы.
Моделирование переходных процессов на ПЭВМ
С помощью известной системы математических расчетов Matlab, в которую встроен специальный пакет для исследования систем автоматического управления — Control System Toolbox, можно по передаточной функции системы построить необходимые графики временных характеристик. В Matlab также можно представить эквивалентную модель системы в среде Simulink и исследовать ее характеристики в этом приложении.
Рассмотрим применение описанных возможностей работы в Matlab на примере системы, структурная схема которой задана в виде последовательного соединения двух апериодических звеньев с параметрами:


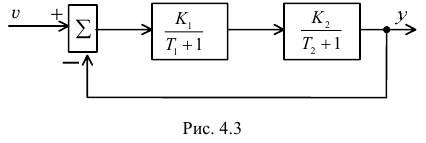
Для этой системы построим график переходной функции двумя способами.
- При использовании операторов пакета Control System Toolbox запишем в командном окне следующую программу:

В первой строке происходит определение параметров системы и присвоение им численных значений.
Если передаточную функцию разомкнутой системы представить в виде отношения полиномов по степеням :

то удобно использовать оператор  , который позволяет записывать передаточные функции путем формирования векторов коэффициентов числителя и знаменателя так, как это представлено во второй строке программы.
, который позволяет записывать передаточные функции путем формирования векторов коэффициентов числителя и знаменателя так, как это представлено во второй строке программы.
В третьей строке оператор feedback замыкает систему с единичным коэффициентом усиления в цепи обратной связи.
Оператор step позволяет построить переходной процесс системы при подаче на ее вход единичной ступенчатой функции  .
.
График переходного процесса, полученный в результате выполнения программы, представлен на рис. 4.4.
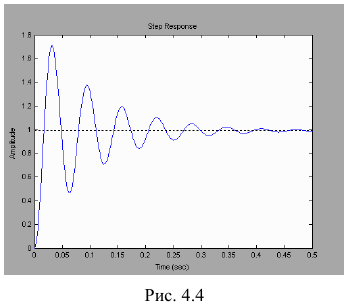
- Представим модель системы в среде Simulink, как показано на рис. 4.5, используя стандартные блоки из библиотеки ее приложения.
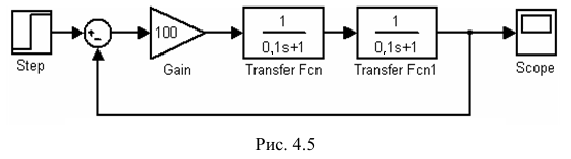
При моделировании получим на экране виртуального осциллографа (Scope) график переходного процесса (рис. 4.6), который совпадает с приведенным на рис. 4.4.
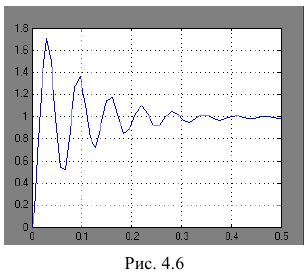
Аналогичным образом могут быть построены и другие характеристики системы.
Устойчивость процессов в системах автоматического управления
Общие определения устойчивости процессов, справедливые как для линейных, так и для нелинейных систем, будут даны во второй части конспекта лекций. Здесь отметим, что свойство устойчивости или неустойчивости заданного процесса, протекающего в системе, рассматривается по отношению к другим процессам той же системы, отличающимся от заданного за счет изменений начальных условий. Величинами, отклоняющими процесс от заданного, являются возмущения начальных условий.
Для случая линейной системы динамические процессы в ней описываются линейным дифференциальным уравнением:

общее решение которого определяется выражением (4.3):

Изменение начальных условий влияет только на поведение свободной составляющей и не влияет на  , откуда следует, что устойчивость будет определяться поведением свободной составляющей. Если
, откуда следует, что устойчивость будет определяться поведением свободной составляющей. Если  , то процессы в линейной системе будем называть асимптотически устойчивыми, при
, то процессы в линейной системе будем называть асимптотически устойчивыми, при  — неустойчивыми и, если при любом
— неустойчивыми и, если при любом  свободная составляющая ограничена, то процессы будут просто устойчивы. Если одно из указанных свойств присуще какому-либо процессу, то для линейной системы оно будет справедливо для всех процессов. Поэтому принято говорить об асимптотической устойчивости, неустойчивости или просто устойчивости линейной системы. В последнем случае еще говорят, что линейная система находится на границе устойчивости или является нейтральной.
свободная составляющая ограничена, то процессы будут просто устойчивы. Если одно из указанных свойств присуще какому-либо процессу, то для линейной системы оно будет справедливо для всех процессов. Поэтому принято говорить об асимптотической устойчивости, неустойчивости или просто устойчивости линейной системы. В последнем случае еще говорят, что линейная система находится на границе устойчивости или является нейтральной.
Структура свободной составляющей имеет вид (4.4) или (4.5). Из (4.4), (4.5) следует, что поведение свободной составляющей во времени не зависит от величин  и соответственно от начальных условий, а полностью определяется видом корней
и соответственно от начальных условий, а полностью определяется видом корней  .
.
В комплексной плоскости корней корни интерпретируются как соответствующие точки. Если корень  лежит слева от мнимой оси, т. е.
лежит слева от мнимой оси, т. е.  , будем называть его левым корнем, если
, будем называть его левым корнем, если  — правым.
— правым.
Пусть  — левый корень, тогда составляющая
— левый корень, тогда составляющая

в (4.4) при  будет затухать и стремиться к 0, а в случае правого корня
будет затухать и стремиться к 0, а в случае правого корня  — наоборот возрастать до бесконечности. Таким образом, при различных корнях характеристического уравнения, если все корни левые,
— наоборот возрастать до бесконечности. Таким образом, при различных корнях характеристического уравнения, если все корни левые,  , что соответствует факту асимптотической устойчивости системы. Если хотя бы один корень правый
, что соответствует факту асимптотической устойчивости системы. Если хотя бы один корень правый  , то
, то  и система будет неустойчива. Если для всех различных корней справедливо соотношение
и система будет неустойчива. Если для всех различных корней справедливо соотношение  , то в свободной составляющей появятся слагаемые, которые будут либо постоянными (нулевой корень), либо будут изменяться по гармоническому закону (чисто мнимые корни) и составляющая
, то в свободной составляющей появятся слагаемые, которые будут либо постоянными (нулевой корень), либо будут изменяться по гармоническому закону (чисто мнимые корни) и составляющая  будет ограничена, что соответствует нейтральной системе.
будет ограничена, что соответствует нейтральной системе.
В случае кратного корня  , если
, если

так как при любом  функция
функция  затухает быстрее, чем возрастает функция в скобках. Если же
затухает быстрее, чем возрастает функция в скобках. Если же  , то это утверждение не правомерно.
, то это утверждение не правомерно.
Таким образом, необходимым и достаточным условием асимптотической устойчивости линейной системы, описываемой уравнением (5.1), является выполнение соотношения

Система будет просто устойчива, если  и среди корней, лежащих на мнимой оси, нет кратных. Система будет неустойчива, если имеется хотя бы один корень, для которого , или хотя бы один кратный корень, лежащий на мнимой оси.
и среди корней, лежащих на мнимой оси, нет кратных. Система будет неустойчива, если имеется хотя бы один корень, для которого , или хотя бы один кратный корень, лежащий на мнимой оси.
Суждение об устойчивости можно сделать, найдя корни характеристического уравнения замкнутой системы

Эту задачу можно упростить, так как фактически нам достаточно знать лишь расположение корней в плоскости корней относительно мнимой оси, которую называют границей устойчивости. Выделяют три типа границы устойчивости: апериодического типа, которая характеризуется нулевым корнем характеристического уравнения, колебательного типа, что соответствует наличию пары чисто мнимых корней, и границу, соответствующую бесконечно удаленному корню ( (5.2)). Если все корни уравнения (5.2) лежат слева от мнимой оси, т. е.
(5.2)). Если все корни уравнения (5.2) лежат слева от мнимой оси, т. е.

то характеристический полином  будем называть полиномом Гурвица, или гурвииевым полиномом.
будем называть полиномом Гурвица, или гурвииевым полиномом.
Определение расположения корней уравнения (5.2) относительно мнимой оси без их непосредственного вычисления производят на основе критериев устойчивости, которые делятся на две группы: алгебраические и частотные.
Алгебраические критерии устойчивости
К алгебраическим критериям устойчивости относят те, которые позволяют судить об устойчивости системы по коэффициентам уравнения (5.2). Необходимым условием устойчивости линейной системы (5.1) является положительность коэффициентов характеристического уравнения (5.2), т. е.
Докажем этот критерий. Пусть уравнение (5.2) имеет  -корней
-корней  , тогда полином можно по теореме Безу представить в виде
, тогда полином можно по теореме Безу представить в виде

Если  , то произведение сомножителей
, то произведение сомножителей  всегда даст полином -й степени с положительными коэффициентами и с учетом
всегда даст полином -й степени с положительными коэффициентами и с учетом  получим (5.3).
получим (5.3).
Критерий является лишь необходимым, т. е. если среди  есть отрицательные коэффициенты, то система неустойчива; если все положительны, то система может быть как устойчивой, так и неустойчивой. В этом последнем случае требуется дальнейшее исследование.
есть отрицательные коэффициенты, то система неустойчива; если все положительны, то система может быть как устойчивой, так и неустойчивой. В этом последнем случае требуется дальнейшее исследование.
Рассмотрим критерий, дающий необходимые и достаточные условия устойчивости, предложенные немецким ученым А. Гурвицем в 1895 году. Предварительно из коэффициентов уравнения (5.2) сформируем матрицу Гурвица
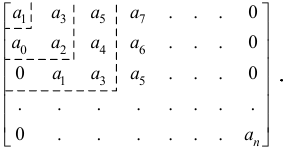
Алгоритм ее формирования следующий. Сначала по главной диагонали слева направо выписываем коэффициенты  . Далее столбцы вверх от главной диагонали дополняются коэффициентами с возрастающими индексами, а вниз — с убывающими индексами. Коэффициенты с индексами больше и меньше нуля заменяются нулями. Последний столбец матрицы имеет все нулевые коэффициенты, кроме последнего
. Далее столбцы вверх от главной диагонали дополняются коэффициентами с возрастающими индексами, а вниз — с убывающими индексами. Коэффициенты с индексами больше и меньше нуля заменяются нулями. Последний столбец матрицы имеет все нулевые коэффициенты, кроме последнего  . Обозначим через
. Обозначим через  — главные определители матрицы Гурвица, которые выделены в (5.4) штриховыми линиями:
— главные определители матрицы Гурвица, которые выделены в (5.4) штриховыми линиями:

где  — определитель матрицы Гурвица.
— определитель матрицы Гурвица.
Критерий Гурвица. Необходимым и достаточным условием устойчивости линейной системы является при  положительность всех определителей Гурвица
положительность всех определителей Гурвица

Для систем до 4-го порядка включительно, раскрывая определители Гурвица, можно получить следующие необходимые и достаточные условия устойчивости:
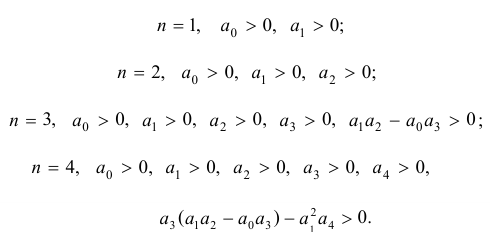
Из (5.6), (5.7) следует, что для системы первого и второго порядка необходимые условия совпадают с необходимыми и достаточными, а при = 3 и 4, кроме необходимых условий, следует соблюдать дополнительное неравенство. При = 5 и 6 появляются два дополнительных неравенства, при = 7 и 8 — три и т. д. При аналитических исследованиях критерий Гурвица наиболее удобен для систем, порядок которых  .
.
С помощью критерия Гурвица можно определить границы устойчивости. Если  и все определители Гурвица кроме последнего, больше нуля, то нарушение условий устойчивости будет при
и все определители Гурвица кроме последнего, больше нуля, то нарушение условий устойчивости будет при  , откуда при
, откуда при  получаем границу устойчивости апериодического типа (появляется один нулевой корень), а при
получаем границу устойчивости апериодического типа (появляется один нулевой корень), а при  границу устойчивости колебательного типа (появляются два комплексно — сопряженных корня). При этом все остальные корни являются левыми. Граница устойчивости, соответствующая бесконечному корню, будет
границу устойчивости колебательного типа (появляются два комплексно — сопряженных корня). При этом все остальные корни являются левыми. Граница устойчивости, соответствующая бесконечному корню, будет  .
.
Одним из частных случаев критерия Гурвица является критерий Льенара-Шипара (1914), по которому для устойчивости системы необходимо и достаточно выполнение следующих неравенств:

т. е. при соблюдении необходимых условий устойчивости требуется положительность четных или нечетных определителей Гурвица.
Вторым распространенным алгебраическим критерием устойчивости, дающим необходимые и достаточные условия устойчивости, является критерий Рауса-Гурвица. Этот критерий более удобен при анализе устойчивости с помощью ПЭВМ.
На первом этапе составляется таблица Рауса, элементы которой образуются из коэффициентов характеристического полинома замкнутой системы

в которой

Таблица Рауса выглядит так:
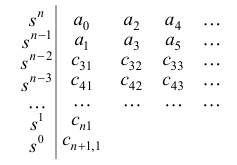
Первые две строки состоят из коэффициентов  . Коэффициенты последующих строк вычисляются так:
. Коэффициенты последующих строк вычисляются так:
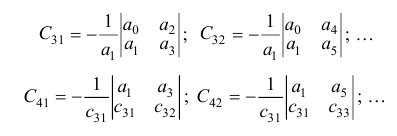
Левый столбец записывается для наглядности.
По критерию Рауса-Гурвица система устойчива, если при  положительны все элементы первого столбца таблицы
положительны все элементы первого столбца таблицы


Число правых корней в случае неустойчивой САУ равно числу перемен знака элементов первого столбца. Если элемент какой-то строки первого столбца равен нулю, то САУ либо неустойчива, либо находится на границе устойчивости [6].
Задача №5.1.
Рассмотрим замкнутую систему управления, у которой передаточная функция разомкнутой системы  имеет порядок не выше второго
имеет порядок не выше второго  и определяется одним из перечисленных выражений:
и определяется одним из перечисленных выражений:

Характеристическое уравнение замкнутой системы для соответствующей разомкнутой будет иметь следующий вид:



Если параметры

то в соответствии с (5.6), (5.7) замкнутая система будет асимптотически устойчивой для всех передаточных функций, кроме

В этом случае замкнутая система будет находиться на границе устойчивости, так как характеристическое уравнение  имеет чисто мнимые корни
имеет чисто мнимые корни  (коэффициент
(коэффициент  и условие (5.7) не выполняется).
и условие (5.7) не выполняется).
Задача №5.2.
Пусть передаточная функция разомкнутой системы

Характеристическое уравнение замкнутой системы будет

из которого следует, что при  ряд коэффициентов характеристического уравнения
ряд коэффициентов характеристического уравнения  (при
(при  ),
),  (при
(при  ) и т.д. равен нулю. В этом случае не выполняется необходимое условие устойчивости (5.3) и система ни при таких значениях параметров
) и т.д. равен нулю. В этом случае не выполняется необходимое условие устойчивости (5.3) и система ни при таких значениях параметров  и
и  не может быть асимптотически устойчивой. Такой класс систем называют структурно неустойчивыми.
не может быть асимптотически устойчивой. Такой класс систем называют структурно неустойчивыми.
Задача №5.3.
Передаточная функция разомкнутой системы задана в виде
Характеристическое уравнение будет

Используя (5.8), найдем условие устойчивости системы в виде

из которого следуют неравенства:

Таким образом, при заданных  и
и  максимальное значение коэффициента усиления ограничено и увеличение приведет к потери устойчивости. Это свойство, как будет показано дальше, является весьма характерным для систем автоматического управления и в общем случае. Система будет находиться на границе устойчивости, если выполняется одно из соотношений:
максимальное значение коэффициента усиления ограничено и увеличение приведет к потери устойчивости. Это свойство, как будет показано дальше, является весьма характерным для систем автоматического управления и в общем случае. Система будет находиться на границе устойчивости, если выполняется одно из соотношений:
Этот критерий относится к группе частотных и был предложен в 1938г. А. Михайловым. Он базируется на известном в теории функции комплексного переменного принципе аргумента. Характеристический полином замкнутой системы представим в виде

где  — корни уравнения
— корни уравнения  .
.
Сделаем замену  , тогда
, тогда  . Приращение аргумента вектора
. Приращение аргумента вектора  при изменении частоты
при изменении частоты  от
от  до
до  будет равно
будет равно  для левого корня и
для левого корня и  для правого корня (рис. 5.1). Приращение аргумента вектора
для правого корня (рис. 5.1). Приращение аргумента вектора  , имеющего
, имеющего  правых и
правых и  левых корней, будет равно
левых корней, будет равно

а при изменении от 0 до — в 2 раза меньше, т. е.
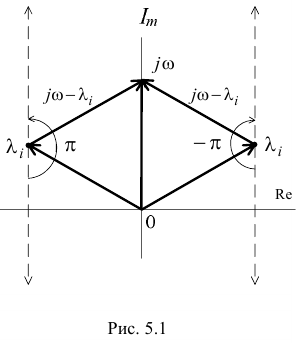
Из последнего выражения следует, что для устойчивой САУ  и
и
Полином  после замены
после замены  представляет собой комплексное число, действительная и мнимая части которого зависят от частоты :
представляет собой комплексное число, действительная и мнимая части которого зависят от частоты :
Изменяя от нуля до , на комплексной плоскости строится годограф, который называется кривой Михайлова. При = 0 он всегда будет находиться на действительной оси в точке  , а при
, а при  значения
значения  и
и  равны или , т. е. годограф будет уходить в бесконечность в каком-либо квадранте комплексной плоскости.
равны или , т. е. годограф будет уходить в бесконечность в каком-либо квадранте комплексной плоскости.
Критерий Михайлова. Для устойчивости линейной системы необходимо и достаточно, чтобы приращение аргумента функции  при изменении от нуля до равнялось
при изменении от нуля до равнялось  что означает последовательное прохождение кривой Михайлова
что означает последовательное прохождение кривой Михайлова  квадрантов против часовой стрелки в комплексной плоскости.
квадрантов против часовой стрелки в комплексной плоскости.
Обычно критерий Михайлова применяется посла проверки необходимого условия устойчивости (5.3).
На рис. 5.2 представлен ряд кривых Михайлова для систем различного порядка.
Кривые 1,2 соответствуют устойчивым системам при = 3,4 соответственно, кривая 3 — неустойчивой системе при = 4, так как нарушена последовательность прохождения квадратов комплексной плоскости.
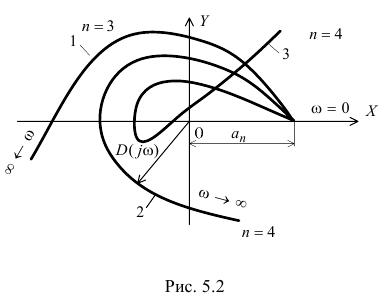
Рассмотрим определение с помощью кривой Михайлова границ устойчивости. Система будет находиться на границе устойчивости, если чисто мнимая величина  будет являться корнем уравнения
будет являться корнем уравнения  , что означает , т.е. кривая Михайлова должна проходить через начало координат. При
, что означает , т.е. кривая Михайлова должна проходить через начало координат. При  имеем апериодическую границу, при
имеем апериодическую границу, при  — колебательную,
— колебательную,  соответствует бесконечному корню. При этом следует проверить, чтобы все остальные корни были левыми. Такую проверку можно осуществить, исследуя соответствующий график кривой Михайлова в точке пересечения начала координат. Если малые деформации кривой приводят к устойчивой системе, то это соответствует границе устойчивости.
соответствует бесконечному корню. При этом следует проверить, чтобы все остальные корни были левыми. Такую проверку можно осуществить, исследуя соответствующий график кривой Михайлова в точке пересечения начала координат. Если малые деформации кривой приводят к устойчивой системе, то это соответствует границе устойчивости.
На рис. 5.3 представлены два годографа, проходящие через начало координат.
Для кривой 1 малые деформации ее в начале координат приведут к устойчивой системе, что соответствует границе устойчивости, а для кривой 2 система при малых деформациях графика все равно будет неустойчивой.
Задача №5.4.
Передаточная функция разомкнутой системы имеет вид
Характеристический полином замкнутой системы будет

и соответственно

При любом  кривая Михайлова при
кривая Михайлова при  будет начинаться на действительной оси в точке с координатами
будет начинаться на действительной оси в точке с координатами  и всегда проходить последовательно первый и второй квадранты комплексной области, так как мнимая часть всегда положительна, а действительная с ростом
и всегда проходить последовательно первый и второй квадранты комплексной области, так как мнимая часть всегда положительна, а действительная с ростом  меняет знак с плюса на минус.
меняет знак с плюса на минус.
Система при любых всегда устойчива, что совпадает с результатом примера 5.1.
Критерий устойчивости Найквиста
Критерий устойчивости Найквиста — это также частотный критерий, предложенный в 1932 г. Найквистом. Он позволяет судить об устойчивости замкнутой системы управления по виду АФЧХ разомкнутой системы.
Пусть задана передаточная функция разомкнутой системы в виде
где  — полином степени
— полином степени  — полином степени
— полином степени  .
.
Тогда ее АФЧХ будет
Составим вспомогательную функцию

где  — характеристический полином замкнутой системы, степень которого будет
— характеристический полином замкнутой системы, степень которого будет  .
.
Предположим, что характеристическое уравнение разомкнутой системы  имеет
имеет  правых корней и
правых корней и  левых корней. Тогда приращение аргумента функции
левых корней. Тогда приращение аргумента функции  при изменении
при изменении  от
от  до
до  будет
будет  . Если система устойчива в замкнутом состоянии, то характеристическое уравнение замкнутой системы
. Если система устойчива в замкнутом состоянии, то характеристическое уравнение замкнутой системы  имеет
имеет  левых корней и приращение аргумента
левых корней и приращение аргумента  будет равно
будет равно . Найдем приращение аргумента функции
. Найдем приращение аргумента функции  при изменении от до , которое будет в этом случае равно
при изменении от до , которое будет в этом случае равно

В случае, если передаточная функция  соответствует статической системе (соответствие астатической системе рассмотрим ниже), то при
соответствует статической системе (соответствие астатической системе рассмотрим ниже), то при  АФЧХ
АФЧХ  при изменении от до всегда образует замкнутую кривую. Соответственно в комплексной плоскости также всегда образует замкнутую кривую. Таким образом, условие (5.13) для замкнутой кривой соответствует тому, что вектор при изменении от до должен в положительном направлении обойти (охватить) начало координат раз. Из связи
при изменении от до всегда образует замкнутую кривую. Соответственно в комплексной плоскости также всегда образует замкнутую кривую. Таким образом, условие (5.13) для замкнутой кривой соответствует тому, что вектор при изменении от до должен в положительном направлении обойти (охватить) начало координат раз. Из связи  для АФЧХ это соответствует охвату точки с координатами
для АФЧХ это соответствует охвату точки с координатами  на комплексной плоскости раз годографом . На основании изложенного сформулируем критерий.
на комплексной плоскости раз годографом . На основании изложенного сформулируем критерий.
Критерий Найквиста. Если разомкнутая система автоматического управления имеет правых корней, то для того, чтобы замкнутая система была устойчива, необходимо и достаточно, чтобы АФЧХ разомкнутой системы при изменении частоты от до + охватывала точку на комплексной плоскости в положительном направлении раз.
Частный случай критерия Найквиста относится к системе, устойчивой в разомкнутом состоянии ( = 0). При этом годограф не должен охватывать точку .
Так как при < 0 график является зеркальным отображением относительно действительной оси графика при > 0, то обычно достаточно построить для > 0. При этом в формулировке критерия полагают охват точки  раз.
раз.
На рис. 5.4, а, б представлены графики  в предположении = 2 для случая устойчивой в замкнутом состоянии системы.
в предположении = 2 для случая устойчивой в замкнутом состоянии системы.
Из изложенного следует, что при корректном применении критерия устойчивости Найквиста следует сначала исследовать устойчивость разомкнутой системы и знать число правых корней ее характеристического уравнения. На практике обычно это нетрудно сделать по виду передаточной функции если она представлена в виде произведения передаточных функций отдельных звеньев.
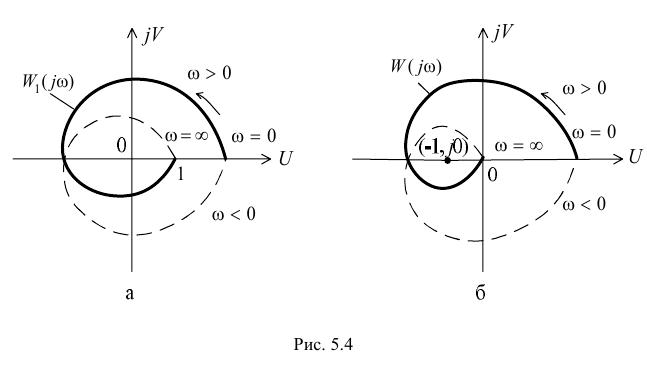
В случае астатической системы формулировка критерия Найквиста сохраняется, однако при этом возникает проблема понятия охвата и неохвата точки , так как при  годограф уходит в бесконечность и кривая не является замкнутой. В этом случае АФЧХ дополняется дугой бесконечного радиуса по часовой стрелке и после этого проверяется выполнение условия критерия Найквиста. Изображенная на рис. 5.5 система устойчива.
годограф уходит в бесконечность и кривая не является замкнутой. В этом случае АФЧХ дополняется дугой бесконечного радиуса по часовой стрелке и после этого проверяется выполнение условия критерия Найквиста. Изображенная на рис. 5.5 система устойчива.
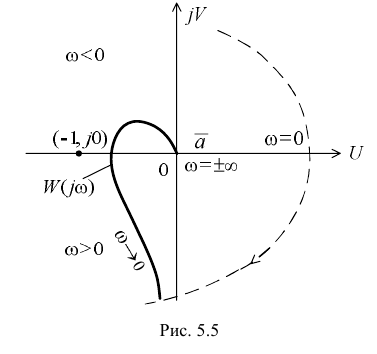
Для нормального функционирования система управления должна обладать и некоторыми запасами устойчивости, т. е. при изменении параметров системы в процессе работы свойство устойчивости должно сохраняться.
Вполне очевидно, что чем дальше находится кривая от точки , тем система будет находиться дальше от границы устойчивости. Числовые величины, характеризующие это свойство, носят название запасов устойчивости и могут быть введены различными способами. На рис. 5.6 представлена АФЧХ разомкнутой системы для устойчивой замкнутой системы.
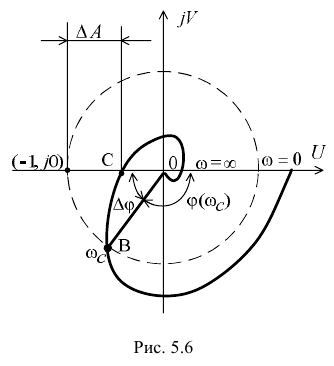
Запас устойчивости по фазе определяется как величина угла

где  значение фазы при
значение фазы при  , а частота среза
, а частота среза  — это значение частоты, при которой
— это значение частоты, при которой  . Из рис. 5.6 видно, что точка
. Из рис. 5.6 видно, что точка  получается пересечением и окружности единичного радиуса (штриховая линия).
получается пересечением и окружности единичного радиуса (штриховая линия).
Запас устойчивости по амплитуде  — это величина отрезка оси абсцисс между критической точкой и точкой
— это величина отрезка оси абсцисс между критической точкой и точкой  пересечения с осью абсцисс (там, где
пересечения с осью абсцисс (там, где  ). Очевидно, в данном случае величина всегда меньше единицы.
). Очевидно, в данном случае величина всегда меньше единицы.
Если характеристика имеет более сложные очертания (так называемая клювообразная характеристика представлена на рис. 5.7), то запас по амплитуде характеризуют двумя числами  , а запас по фазе
, а запас по фазе  определяется обычным образом.
определяется обычным образом.
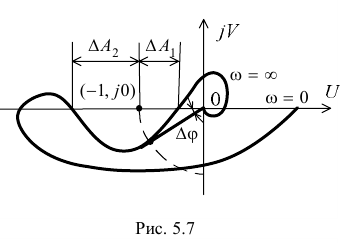
Рассмотрим интерпретацию критерия Найквиста в логарифмической области. Для простоты рассмотрим систему, устойчивую в разомкнутом состоянии, для которой АФЧХ разомкнутой системы не должна охватывать точку . Очевидно, «опасным» с точки зрения устойчивости является отрезок действительной оси  , когда фазовая характеристика равна
, когда фазовая характеристика равна  и т.д. При этом модуль
и т.д. При этом модуль  .Пересечение же отрезка действительной оси (-1, 0) годографом безопасно с точки зрения устойчивости. Если перейти к логарифмическим частотным характеристикам
.Пересечение же отрезка действительной оси (-1, 0) годографом безопасно с точки зрения устойчивости. Если перейти к логарифмическим частотным характеристикам  и
и  , то характеристики, приведенные на рис. 5.7, будут соответствовать логарифмическим характеристикам, изображенным на рис. 5.8.
, то характеристики, приведенные на рис. 5.7, будут соответствовать логарифмическим характеристикам, изображенным на рис. 5.8.
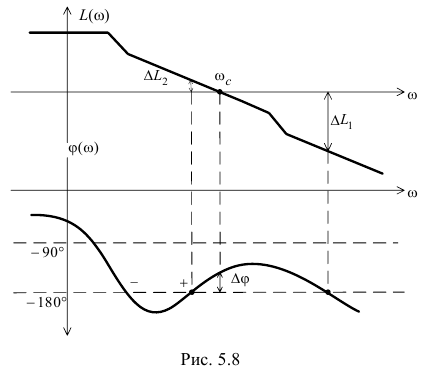
В общем случае критерий Найквиста применительно к логарифмическим характеристикам формулируется так: для устойчивости замкнутой системы необходимо и достаточно, чтобы разность между числом положительных и отрицательных переходов логарифмической фазовой частотной характеристикой  разомкнутой системы прямых
разомкнутой системы прямых  во всех областях,
во всех областях,  была равна
была равна  (
( — число правых корней характеристического уравнения разомкнутой системы).
— число правых корней характеристического уравнения разомкнутой системы).
Отметим, что ) > 0 обычно до частоты среза системы . Если система устойчива в разомкнутом состоянии, то = 0.
При использовании логарифмических характеристик также вводят запасы устойчивости, показанные на рис. 5.8. При запас устойчивости по фазе определяется как

а запас устойчивости по модулю характеризуется величинами отрезков  выраженными в децибелах. В случае обычных, не клювообразных, характеристик
выраженными в децибелах. В случае обычных, не клювообразных, характеристик  запас устойчивости по модулю характеризуется одной величиной
запас устойчивости по модулю характеризуется одной величиной  , определяемой на критической частоте
, определяемой на критической частоте  , соответствующей
, соответствующей  .
.
На практике величина запасов устойчивости по фазе и модулю обычно колеблется в пределах 30°…60° и (6…20) дБ. Величина (6…20) дБ соответствует усилению в (2… 10) раз.
Рассмотрим, как в общих чертах влияют параметры и вид АФЧХ разомкнутой системы на устойчивость. Если
то очевидно, что величина коэффициента усиления не влияет на вид фазовой частотной характеристики. Модуль пропорционален величине  . Таким образом, увеличение (уменьшение) величины будет пропорционально увеличивать (уменьшать)
. Таким образом, увеличение (уменьшение) величины будет пропорционально увеличивать (уменьшать)  , не изменяя фазового угла годографа вектора в комплексной плоскости. Кривая (см. рис. 5.6) будет пропорционально расширяться или сжиматься и с увеличением наступит момент, когда охватит точку и система станет неустойчивой. Это следует и по ЛАЧХ (см. рис. 5.8). Увеличение поднимает характеристику , приводит к смещению вправо по оси абсцисс и в конечном счете к потере устойчивости.
, не изменяя фазового угла годографа вектора в комплексной плоскости. Кривая (см. рис. 5.6) будет пропорционально расширяться или сжиматься и с увеличением наступит момент, когда охватит точку и система станет неустойчивой. Это следует и по ЛАЧХ (см. рис. 5.8). Увеличение поднимает характеристику , приводит к смещению вправо по оси абсцисс и в конечном счете к потере устойчивости.
В случае клювообразных характеристик (см. рис. 5.7, 5.8) возможна потеря устойчивости и при уменьшении общего коэффициента усиления. Увеличение порядка астатизма системы также отрицательно сказывается на устойчивости, так как приводит к увеличению отрицательных фазовых сдвигов.
Построение областей устойчивости
Устойчивость замкнутой системы зависит от корней характеристического уравнения

Пусть при определенных значениях коэффициентов все корни уравнения (5.14) будут левыми. Изменяя коэффициенты  , будем получать то или иное расположение корней на комплексной плоскости. Совокупность всех значений коэффициентов , для которых все корни уравнения (5.14) являются левыми, образует область устойчивости системы в пространстве коэффициентов характеристического уравнения.
, будем получать то или иное расположение корней на комплексной плоскости. Совокупность всех значений коэффициентов , для которых все корни уравнения (5.14) являются левыми, образует область устойчивости системы в пространстве коэффициентов характеристического уравнения.
Так как коэффициенты уравнения (5.14) являются функциями параметров системы (коэффициентов усиления, постоянных времени и т.п.), то аналогично можно говорить об областях устойчивости в пространстве параметров системы.
Обычно такие области строятся при изменении одного или двух параметров системы, так как при большем числе параметров геометрическая интерпретация областей теряет наглядность.
Вполне очевидно, что для построения областей устойчивости достаточно найти только лишь ее границу и показать, что хотя бы для одной из внутренних точек области все корни будут являться левыми.
Границы устойчивости могут быть найдены с помощью любого критерия (Гурвица, Михайлова). Так, в примере 5.3 с помощью критерия Гурвица найдены границы области устойчивости в пространстве трех параметров от  до
до
Однако для выделения областей устойчивости разработан специальный метод  — разбиения, предложенный Ю. Неймарком. Рассмотрим этот метод.
— разбиения, предложенный Ю. Неймарком. Рассмотрим этот метод.
Корень уравнения (5.14) попадает на мнимую ось (границу устойчивости в плоскости корней), если  является решением уравнения (5.14), т. е. выполняется равенство
является решением уравнения (5.14), т. е. выполняется равенство

Если  задано ( = 0 соответствует нулевому корню), то (5.15) можно рассматривать как уравнение относительно искомых коэффициентов , при которых один корень находится на границе устойчивости. Изменяя
задано ( = 0 соответствует нулевому корню), то (5.15) можно рассматривать как уравнение относительно искомых коэффициентов , при которых один корень находится на границе устойчивости. Изменяя  от —
от — до в пространстве коэффициентов , получим некоторую поверхность, соответствующую границе устойчивости (попаданию корня уравнения (5.15) на мнимую ось). Эта поверхность разобьет все пространство коэффициентов на области с определенным расположением левых и правых корней, которые обозначим
до в пространстве коэффициентов , получим некоторую поверхность, соответствующую границе устойчивости (попаданию корня уравнения (5.15) на мнимую ось). Эта поверхность разобьет все пространство коэффициентов на области с определенным расположением левых и правых корней, которые обозначим

Область  соответствует
соответствует  корням в правой полуплоскости,
корням в правой полуплоскости,  — корню в правой полуплоскости и т.д. Область
— корню в правой полуплоскости и т.д. Область  соответствует корням в левой полуплоскости, т. е. области устойчивости. При пересечении границы, определяемой уравнением (5.15), происходит переход корня из левой полуплоскости в правую или наоборот.
соответствует корням в левой полуплоскости, т. е. области устойчивости. При пересечении границы, определяемой уравнением (5.15), происходит переход корня из левой полуплоскости в правую или наоборот.
Рассмотрим частный случай:  — разбиение по одному комплексному параметру. Пусть исследуемый параметр линейно входит в уравнение (5.14), которое в этом случае приводится к виду:
— разбиение по одному комплексному параметру. Пусть исследуемый параметр линейно входит в уравнение (5.14), которое в этом случае приводится к виду:

а граница области — разбиения определяется уравнением:

откуда, полагая  — комплексной величиной и обозначая ее
— комплексной величиной и обозначая ее  , получим
, получим

Границу — разбиения в комплексной плоскости строим, изменяя от — до , которая будет представлять собой некоторую кривую. При изменении от — до 0 кривая будет зеркальным отображением относительно действительной оси кривой при  .
.
При движении вдоль границы — разбиения ее штрихуют слева, двигаясь при изменении от — до , что соответствует в плоскости корней движению вдоль мнимой оси снизу вверх так, что левая полуплоскость корней остается слева.
На рис. 5.9 изображена кривая — разбиения в комплексной плоскости.
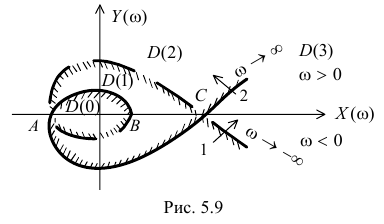
Пересечение границы — разбиения из заштрихованной стороны в незаштрихованную сторону (стрелка 1 на рис. 5.9) соответствует переходу одного корня из левой полуплоскости в правую. Стрелка 2 соответствует переходу правого корня в левую полуплоскость плоскости корней.
Обычно претендентом на область устойчивости является область, внутрь которой направлена штриховка, соответствующая наибольшему количеству левых корней. На рис. 5.9 это область, включающая отрезок  . Для проверки, является ли эта область областью устойчивости
. Для проверки, является ли эта область областью устойчивости  , берут любое значение исследуемого параметра v из этой области, подставляют его в исходное характеристическое уравнение и с помощью любого критерия проверяют устойчивость. Так как на практике исследуемый параметр является действительным, то из полученной области устойчивости выделяют только действительные значения
, берут любое значение исследуемого параметра v из этой области, подставляют его в исходное характеристическое уравнение и с помощью любого критерия проверяют устойчивость. Так как на практике исследуемый параметр является действительным, то из полученной области устойчивости выделяют только действительные значения  . Это будет отрезок . На рис. 5.9 также показаны области
. Это будет отрезок . На рис. 5.9 также показаны области  .
.
Задача №5.7.
Рассмотрим систему автоматического управления из примера 5.3. Построим кривую — разбиения по одному параметру — коэффициенту  . Характеристическое уравнение замкнутой системы имеет вид
. Характеристическое уравнение замкнутой системы имеет вид

Заменяя  , получим
, получим

откуда, считая комплексным, получим

В комплексной плоскости параметра  при изменении от — до будем иметь кривую, изображенную на рис. 5.10.
при изменении от — до будем иметь кривую, изображенную на рис. 5.10.
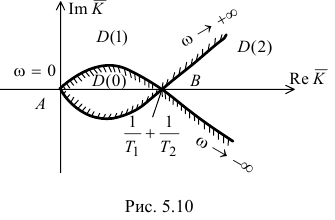
В точке  величина
величина
Областью устойчивости будет область , что определяется с помощью критерия Гурвица. Так как — действительная величина, то получаем отрезок устойчивости , т. е. область устойчивости будет определяться неравенством
совпадает с результатом примера 5.3.
Точность систем автоматического управления
Обратимся к стандартной структуре системы автоматического управления, представленной на рис. 3.1. Основным назначением системы является как можно более точное воспроизведение управляющего сигнала. Естественно, что точность системы можно оценивать величиной разности управляющего сигнала  и выхода
и выхода  , т. е. величиной ошибки
, т. е. величиной ошибки  . Очевидно, чем меньше величина
. Очевидно, чем меньше величина  по модулю в каждый данный момент времени, тем система с большей точностью (меньшей ошибкой) воспроизводит управляющий сигнал. На практике интересуются не полной ошибкой системы , а так называемой установившейся ошибкой
по модулю в каждый данный момент времени, тем система с большей точностью (меньшей ошибкой) воспроизводит управляющий сигнал. На практике интересуются не полной ошибкой системы , а так называемой установившейся ошибкой  , которую определяют для достаточно больших моментов времени после затухания переходной составляющей.
, которую определяют для достаточно больших моментов времени после затухания переходной составляющей.
Изображение ошибки в соответствии с рис. 3.1 можно записать в виде

где

Из (6.1) следует, что ошибка системы будет определяться суммой двух составляющих: ошибкой системы от управляющего и ошибкой системы от возмущающего воздействий.
В силу линейности системы методика вычисления каждой из этих составляющих будет однотипной, поэтому рассмотрим лишь методы вычисления ошибки системы от управляющего сигнала.
При определенных типах воздействий и определенной структуре системы установившаяся ошибка в системе будет постоянной и может быть вычислена на основании правил операционного исчисления по выражению

Рассмотрим входные воздействия:


изображения которых будут соответственно равны:

Пусть передаточная функция разомкнутой системы

Если  (статическая система),
(статическая система),  то, подставляя в (6.2)
то, подставляя в (6.2)
получим
Ошибку  будем называть статической ошибкой системы.
будем называть статической ошибкой системы.
При  (система с астатизмом первого порядка) вычислим ошибку при воздействиях
(система с астатизмом первого порядка) вычислим ошибку при воздействиях  . Подставляя передаточную функцию
. Подставляя передаточную функцию  и изображение входного сигнала в (6.2), получим соответственно для первого и второго типов входного сигнала
и изображение входного сигнала в (6.2), получим соответственно для первого и второго типов входного сигнала
где ошибку  будем называть ошибкой по скорости (скоростной ошибкой).
будем называть ошибкой по скорости (скоростной ошибкой).
При  и входных сигналах
и входных сигналах

соответственно получим следующие выражения ошибок:
где  — ошибка системы по ускорению.
— ошибка системы по ускорению.
При воздействии вида

для системы с астатизмом  — го порядка получаем
— го порядка получаем

Из приведенных выражений следует, что ошибки в системе уменьшаются с ростом порядка астатизма системы и увеличением общего коэффициента усиления .
На рис. 6.1 показаны переходные процессы в различных системах при отработке скачка по положению и скорости: кривая 1 — для статической системы, 2 — для системы с астатизмом первого порядка, 3 — для системы с астатизмом второго порядка.
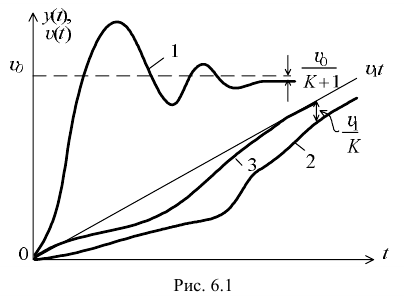
Задача №6.1.
Пусть в системе, изображенной на рис. 6.1,

Найдем изображение сигнала ошибки, равное

Подставляя в это выражение

и используя (6.2), получим  .
.
Таким образом, установившаяся ошибка от управляющего воздействия равна нулю (система астатическая по отношению к управляющему сигналу), а ошибка от возмущающего воздействия постоянна (система статическая по отношению к возмущению). Для уменьшения этой ошибки следует увеличивать коэффициент усиления  первого звена; величина
первого звена; величина  не влияет на ошибку.
не влияет на ошибку.
Рассмотрим ту же систему при условии, что
т. е. интегрирующее звено находится до точки приложения возмущения.
В этом случае

Если

то используя (6.2), получим  , т. е. статическая ошибка как от управляющего, так и от возмущающего воздействий равна нулю и система обладает астатизмом первого порядка по отношению к обоим внешним воздействиям. Если
, т. е. статическая ошибка как от управляющего, так и от возмущающего воздействий равна нулю и система обладает астатизмом первого порядка по отношению к обоим внешним воздействиям. Если

то нетрудно получить
т.е. в системе имеется скоростная ошибка.
Из рассмотренных примеров следует общий вывод: система будет обладать астатизмом -го порядка по отношению к управляющему и возмущающему сигналам, если

Если передаточные функции поменять местами, то система по отношению к возмущению будет статической.
Установившиеся ошибки при произвольном входном сигнале
Обозначим весовую функцию замкнутой системы по ошибке через
Тогда соотношению

во временной области будет соответствовать свертка

Так как нас интересует установившаяся ошибка после затухания переходной составляющей, то отнесем нижний предел интегрирования, соответствующий моменту подачи входного сигнала, в —  . В этом случае получим выражение, справедливое для установившегося значения сигнала ошибки:
. В этом случае получим выражение, справедливое для установившегося значения сигнала ошибки:
Заменив переменную интегрирования  получим
получим
Полагая функцию  аналитической, разложим ее в ряд Тейлора при
аналитической, разложим ее в ряд Тейлора при

и подставим полученный ряд в (6.7). В результате получим

где коэффициенты  определяются выражением
определяются выражением
Так как передаточная функция замкнутой системы по ошибке есть прямое преобразование Лапласа от весовой функции
то очевидно соотношение
Коэффициенты носят название коэффициентов ошибок и характеризуют, с каким весом функция и ее производные входят в общее выражение для установившейся ошибки (6.8). Если входной сигнал изменяется достаточно медленно, то в выражении (6.8) можно ограничиться конечным числом членов ряда.
Если
то

В статической системе

для системы с астатизмом первого порядка имеем

Аналогично можно показать, что для астатической системы с астатизмом -го порядка

Коэффициент  называют коэффициентом статической ошибки,
называют коэффициентом статической ошибки,  — коэффициентом скоростной ошибки,
— коэффициентом скоростной ошибки,  — коэффициентом ошибки по ускорению. Из (6.8) следует, что если
— коэффициентом ошибки по ускорению. Из (6.8) следует, что если

то

если

то

В общем случае формула (6.9) редко используется для вычисления . На практике применяется другой способ. Разложим передаточную функцию  в ряд Маклорена при
в ряд Маклорена при  :
:

С другой стороны, так как
есть отношение полиномов, то деля полином числителя на полином знаменателя, получим ряд

Приравнивая коэффициенты при одинаковых степенях  в (6.10), (6.11), получим
в (6.10), (6.11), получим

Величина коэффициентов ошибок в конечном итоге определяет величину ошибки в системе. Из изложенного выше вновь следует, что величины будут тем меньше, чем выше порядок астатизма системы и чем больше величина коэффициента усиления разомкнутой системы.
Задача №6.2.
Пусть передаточная функция разомкнутой системы имеет вид
Найдем первые три коэффициента ошибок. Передаточная функция замкнутой системы по ошибке будет равна

Деля полином числителя на полином знаменателя, получим

В соответствии с (6.12) найдем

Определим установившуюся ошибку в системе при воздействии

Подставляя найденные значения и заданные значения
функции и ее производных в (6.8), получим
Установившиеся ошибки при гармоническом воздействии
Если главная передаточная функция замкнутой системы имеет вид
то при входном сигнале  выходной сигнал в установившемся режиме
выходной сигнал в установившемся режиме  будет определяться выражением
будет определяться выражением

где

Аналогично, зная  , можно найти закон изменения ошибки в установившемся режиме при гармоническом входном сигнале
, можно найти закон изменения ошибки в установившемся режиме при гармоническом входном сигнале  :
:

где

Выражения (6.13), (6.14) позволяют оценить ошибки воспроизведения гармонического сигнала в установившемся режиме. Из этих выражений следует, что, кроме ошибки воспроизведения амплитуды входного гармонического сигнала, существуют и постоянные фазовые ошибки, которые определяются видом фазочастотных характеристик замкнутой системы. Обычно при анализе точности систем управления их не рассматривают, ограничиваясь лишь анализом ошибок воспроизведения амплитуды.
Из (6.13), (6.14) можно получить ошибки воспроизведения амплитуды гармонического сигнала на заданной частоте, равные
первая из которых характеризует разность между максимальными значениями амплитуды входного и выходного сигналов, а вторая — максимальную величину ошибки  . Очевидно, всегда
. Очевидно, всегда  . Так как
. Так как


Если  , то
, то

Таким образом, при малых фазовых сдвигах на заданной частоте со оценки (6.15) и (6.16) будут близки между собой. Это обычно выполняется в диапазоне низких частот.
На рис. 6.2 представлен типичный вид АЧХ замкнутой системы  для случая астатической системы, при этом . В случае статической системы
для случая астатической системы, при этом . В случае статической системы  . На рисунке заштрихованная область соответствует величинам ошибок
. На рисунке заштрихованная область соответствует величинам ошибок  .
.
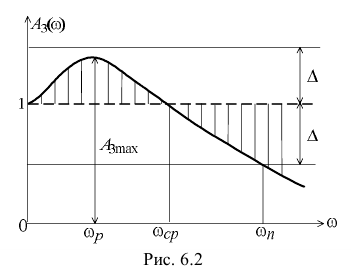
Под полосой пропускания системы понимают диапазон частот  , при котором ошибка
, при котором ошибка  будет меньше некоторой заданной
будет меньше некоторой заданной  , т. е.
, т. е.  .
.
Иногда полосу пропускания определяют как диапазон частот , при котором выполняется условие

Полоса пропускания является важной характеристикой системы. С одной стороны, чем шире полоса пропускания, тем с меньшими ошибками система воспроизводит управляющие сигналы. Однако, с другой стороны, увеличение  приводит к тому, что система становится чувствительной к влиянию высокочастотных помех.
приводит к тому, что система становится чувствительной к влиянию высокочастотных помех.
Из выражения (6.16) можно получить приближенные оценки величины ошибки  . Так как
. Так как
то для статической системы
и при достаточно низких частотах можно полагать

откуда имеем
Для астатической системы
и при низких частотах
откуда получим
Если выполняется условие  , то формула (6.18) принимает вид
, то формула (6.18) принимает вид

Из (6.17) — (6.19) видно, что ошибка системы обратно пропорциональна коэффициенту усиления разомкнутой системы.
Итак, для повышения точности САУ следует увеличивать коэффициент усиления разомкнутой системы либо увеличивать порядок астатизма. Однако это будет приводить в общем случае к ухудшению устойчивости. Таким образом, требования к точности системы и ее устойчивости являются противоречивыми.
Задача №6.3.
Пусть передаточная функция разомкнутой системы имеет вид:
при

Передаточная функция системы по ошибке

Находим величину  (6.16):
(6.16):

Если воспользоваться приближенной формулой (6.19), то
т.е. с точностью до третьего знака оба результата совпадают.
Оценки качества переходных процессов
Численные величины, характеризующие работу системы автоматического управления, носят название показателей качества, которые условно можно разделить на три группы: характеризующие а) устойчивость системы, б) точность системы и в) качество переходных процессов. Обеспечение устойчивости является необходимым условием функционирования любой системы управления и гарантирует затухание свободной или переходной составляющей процесса. К этой первой группе показателей относятся запасы устойчивости по амплитуде  и фазе
и фазе  .
.
После затухания свободной составляющей через достаточно большой промежуток времени в системе протекает установившийся процесс, который обуславливает точность системы. Показателями качества в данном случае выступают величины ошибок в установившемся режиме, которые рассмотрены в разд. 6 (вторая группа).
Наконец, к третьей группе относятся показатели качества переходного процесса, которые характеризуют вид процесса для достаточно малых моментов времени после его начала. Среди таких показателей — время регулирования  , перерегулирование
, перерегулирование  и ряд других, приведенных в подразделе 4.1.
и ряд других, приведенных в подразделе 4.1.
Показатели качества могут быть вычислены двумя способами. Первый -непосредственно по виду переходного процесса. В этом случае их называют прямыми оценками качества. Второй способ — это использование косвенных оценок показателей качества без построения кривой переходного процесса.
В данном разделе рассмотрим наиболее распространенные косвенные методы оценки показателей качества переходного процесса.
Корневые оценки качества
Переходная функция замкнутой системы как реакция системы на единичный скачок по положению вычисляется в соответствии с выражением (4.11), в котором второе слагаемое в виде суммы определяет переходную составляющую
a  — различные корни характеристического уравнения замкнутой системы
— различные корни характеристического уравнения замкнутой системы  .
.
Если

т. е. с течением времени переходная составляющая затухает.
В выражении (7.1) перейдем к модулям в левой и правой частях:
где
Обозначим расстояние от мнимой оси до ближайших действительного корня (рис. 7.1, а) или пары комплексно-сопряженных корней (рис. 7.1, б) на плоскости корней  через
через  .
.
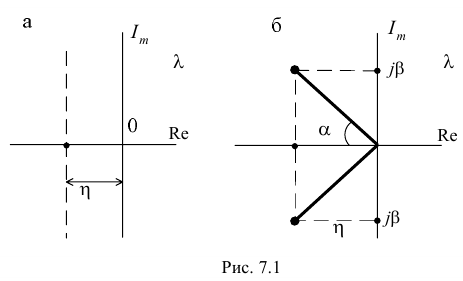
Величину будем называть степенью устойчивости. Очевидно, что
Так как

то для любого множителя

в (7.2) будет справедлива оценка

Таким образом, равносильно выражению
Из (7.3) следует, что переходная составляющая  затухает быстрее, чем экспонента с показателем —. Если принять время регулирования
затухает быстрее, чем экспонента с показателем —. Если принять время регулирования  как время, начиная с которого войдет в 5% трубку от некоторого начального значения, то из (7.3) получим
как время, начиная с которого войдет в 5% трубку от некоторого начального значения, то из (7.3) получим  , откуда
, откуда
Выражение (7.4) и соответственно величина характеризуют предельное быстродействие системы, поэтому иногда величину называют еще мерой быстродействия системы.
Из рассмотренного выше следует, что доминирующее влияние на характер переходного процесса оказывают ближайшие к мнимой оси корни. Если ближайшими являются комплексно-сопряженные корни

то наряду со степенью устойчивости вводят в рассмотрение колебательность системы (колебательность переходного процесса)  . Паре комплексно-сопряженных корней в (7.1) соответствует составляющая
. Паре комплексно-сопряженных корней в (7.1) соответствует составляющая

где  — комплексно-сопряженные величины;
— комплексно-сопряженные величины;  — действительные величины.
— действительные величины.
Составляющая (7.5) носит колебательный характер. Период колебания определяется величиной  . Уменьшение амплитуды в (7.5) за период
. Уменьшение амплитуды в (7.5) за период  будет равно
будет равно
т. е. определяться величиной

Перерегулирование в % может быть оценено по формуле:

С увеличением  увеличивается число колебаний за время регулирования и возрастает перерегулирование. Величина носит чаще качественный характер и является оценкой переходного процесса сверху, поэтому в действительности переходной процесс может иметь лучшие показатели.
увеличивается число колебаний за время регулирования и возрастает перерегулирование. Величина носит чаще качественный характер и является оценкой переходного процесса сверху, поэтому в действительности переходной процесс может иметь лучшие показатели.
Характер переходного процесса в значительной степени зависит от корней  характеристического уравнения, т. е. от полюсов передаточной функции
характеристического уравнения, т. е. от полюсов передаточной функции  замкнутой системы. Однако на величину амплитуды переходных составляющих будут влиять и нули передаточной функции. Пусть полином
замкнутой системы. Однако на величину амплитуды переходных составляющих будут влиять и нули передаточной функции. Пусть полином  имеет
имеет  нулей
нулей  , тогда
, тогда

и выражение (7.1) примет вид

Очевидно, если какой-то полюс  будет близок (или в идеальном случае равен) нулю передаточной функции, то составляющая, соответствующая корню , будет мала по амплитуде (или равна нулю).
будет близок (или в идеальном случае равен) нулю передаточной функции, то составляющая, соответствующая корню , будет мала по амплитуде (или равна нулю).
Впервые корневые оценки качества переходных процессов для систем третьего порядка были предложены в работе И. А. Вышнеградского (1876), положившей начало развитию теории автоматического управления.
Характеристическое уравнение системы третьего порядка

путем замены переменной приводится к виду

где

Коэффициенты  — параметры Вышнеградского — являются комбинацией коэффициентов
— параметры Вышнеградского — являются комбинацией коэффициентов  и в конечном итоге зависят от реальных параметров системы. Условие асимптотической устойчивости для уравнения (7.7) несложно получить с помощью критерия Гурвица, оно имеет вид
и в конечном итоге зависят от реальных параметров системы. Условие асимптотической устойчивости для уравнения (7.7) несложно получить с помощью критерия Гурвица, оно имеет вид  > 1. В области устойчивости, ограниченной гиперболой = 1 в плоскости параметров , нанесем кривые, разделяющие область устойчивости на области с одинаковым расположением корней характеристического уравнения (7.7).
> 1. В области устойчивости, ограниченной гиперболой = 1 в плоскости параметров , нанесем кривые, разделяющие область устойчивости на области с одинаковым расположением корней характеристического уравнения (7.7).
На рис. 7.2 представлена диаграмма Вышнеградского, где для каждой области показано расположение корней и вид переходного процесса.
Таким образом, выбирая из диаграммы требуемый вид переходного процесса, можно найти необходимые значения параметров или .
В заключение отметим ряд простых случаев, когда получены оценки степени устойчивости и соответственно быстродействия системы. Рассмотрим систему управления стандартной структуры, изображенной на рис. 3.1. Пусть передаточная функция объекта управления  имеет вид:
имеет вид:

где

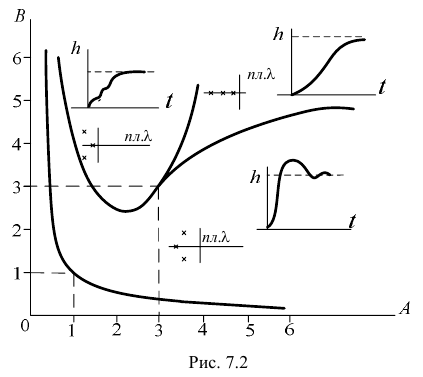
Передаточную функцию  будем рассматривать как передаточную функцию регулятора (управляющего устройства). Рассмотрим три случая закона управления: интегральный
будем рассматривать как передаточную функцию регулятора (управляющего устройства). Рассмотрим три случая закона управления: интегральный
пропорциональный

пропорционально-интегральный
Быстродействие объекта управления может быть охарактеризовано величиной  . Доказано, что для интегрального закона управления быстродействие замкнутой системы, характеризуемое величиной степени устойчивости
. Доказано, что для интегрального закона управления быстродействие замкнутой системы, характеризуемое величиной степени устойчивости  , не будет превосходить быстродействия объекта, т. е.
, не будет превосходить быстродействия объекта, т. е.  .
.
Для пропорционального и пропорционально-интегрального законов управления быстродействие замкнутой системы управления может превосходить быстродействие объекта управления, но будет ограничено неравенством  .
.
Приведенный частный результат распространяется на более общий случай: астатические системы уступают по быстродействию системам статическим.
Задача №7.1.
Пусть передаточная функция разомкнутой системы имеет вид
Характеристическое уравнение замкнутой системы

имеет корни
Если  , то имеем два комплексно-сопряженных корня и
, то имеем два комплексно-сопряженных корня и  ,
,  .
.
Если  , то имеем два действительных корня и
, то имеем два действительных корня и 
Из приведенных соотношений следует, что при  процессы в системе будут носить колебательный характер, а быстродействие системы будет ограничено величиной
процессы в системе будут носить колебательный характер, а быстродействие системы будет ограничено величиной  . При
. При  процессы носят апериодический характер, но быстродействие в системе уменьшается.
процессы носят апериодический характер, но быстродействие в системе уменьшается.
Интегральные оценки качества
Интегральные оценки качества являются интегралами по времени от некоторых функций координат системы (выходной координаты, сигнала ошибки) и оценивают одним числом как величину отклонения, так и время регулирования. В качестве исследуемого процесса обычно выбирается разность между установившимся процессом в системе и самой координатой. Рассмотрим замкнутую систему управления стандартной структуры, на вход которой поступает единичный ступенчатый сигнал  . Тогда реакция системы будет представлять собой переходную функцию
. Тогда реакция системы будет представлять собой переходную функцию  , которая в соответствии с (4.10) определяется выражением
, которая в соответствии с (4.10) определяется выражением
где
установившаяся составляющая;  — переходная составляющая, характеризующая переходной процесс.
— переходная составляющая, характеризующая переходной процесс.
Введем отклонение

процесса от его установившегося значения. Очевидно, что

Простейшими интегральными оценками качества являются следующие:
Оценка  носит название линейной интегральной оценки,
носит название линейной интегральной оценки,  — абсолютной интегральной и
— абсолютной интегральной и  — квадратичной интегральной оценки.
— квадратичной интегральной оценки.
Значение интегралов будет конечной величиной только в том случае, если

т. е. только для асимптотически устойчивых систем.
Поясним физический смысл оценок (7.8) — (7.10), для чего обратимся к рис. 7.3. Для  , соответствующих кривым 1, 2, 3 (см. рис. 4.2), построены графики отклонения
, соответствующих кривым 1, 2, 3 (см. рис. 4.2), построены графики отклонения  (на рис. 7.3 соответственно кривые 1, 2, 3).
(на рис. 7.3 соответственно кривые 1, 2, 3).
Величина для кривой 1 есть величина площади, ограниченной этой кривой и координатными осями.
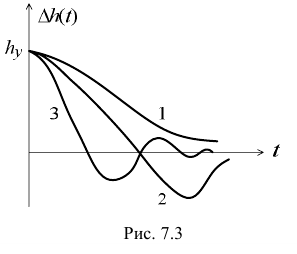
Очевидно, чем меньше , тем меньше текущие отклонения от установившегося значения и тем меньше будет время регулирования в системе. В идеальном случае, если =0, то время регулирования будет равно нулю. Для кривых 2, 3 в силу того, что они меняют свой знак, оценка неприменима, так как величина интеграла может оказаться очень малой (даже равной нулю), но процессы будут затухать медленно. Поэтому линейные интегральные оценки можно применять, если заведомо известно, что переходная составляющая имеет монотонный характер.
Для колебательных процессов обычно применяются оценки  , которые имеют аналогичный смысл: чем меньше величина
, которые имеют аналогичный смысл: чем меньше величина  , тем меньше время регулирования и меньше отклонения координаты системы от установившегося процесса.
, тем меньше время регулирования и меньше отклонения координаты системы от установившегося процесса.
Любые интегральные оценки носят качественный и сравнительный характер, т. е. по величине нельзя определить, например, время регулирования или перерегулирование в системе. Но если для двух вариантов проектируемой системы окажется, что  , то считается, что качественные показатели первой системы лучше, чем второй.
, то считается, что качественные показатели первой системы лучше, чем второй.
Наиболее просто вычисляются интегральные оценки и . Пусть передаточная функция замкнутой системы имеет вид

Найдем изображение отклонения
с учетом того, что


Так как

то с учетом (7.11) имеем
Квадратичная интегральная оценка может быть определена на основе формулы Парсеваля (или Релея).
В частности, для астатических систем
Изображение отклонения  всегда можно представить как отношение двух полиномов
всегда можно представить как отношение двух полиномов

При этом оценка может быть аналитически вычислена при  через коэффициенты
через коэффициенты  (7.15). Выражение для вычисления имеет достаточно сложный вид и здесь не приводится. Для наиболее распространенного случая
(7.15). Выражение для вычисления имеет достаточно сложный вид и здесь не приводится. Для наиболее распространенного случая  приведем несколько конечных выражений для вычисления :
приведем несколько конечных выражений для вычисления :
Наряду с оценками  употребляются и более сложные интегральные оценки, учитывавшие не только само отклонение , но и его производные.
употребляются и более сложные интегральные оценки, учитывавшие не только само отклонение , но и его производные.
При использовании интегральных оценок можно выделить два направления: анализ системы — получение оценки для заданной системы и синтез системы — минимизация оценки по каким-либо параметрам.
Задача №7.2.
Рассмотрим методику применения интегральных оценок к системе, исследуемой в примере 7.1. Передаточная функция замкнутой системы имеет вид
и в соответствии с (7.11) имеем  ,
,

Линейная интегральная оценка (7.13) в этом случае

Оценка справедлива для монотонных процессов, когда корни характеристического уравнения замкнутой системы различны, т. е. выполняется условие
Итак, увеличение величины  уменьшает
уменьшает  и время регулирования. Минимальное значение
и время регулирования. Минимальное значение  при
при  .
.
Вычислим для этой же системы величину  , для чего найдем изображение отклонения
, для чего найдем изображение отклонения

Коэффициенты в (7.15) будут

Используя (7.16), получим
откуда следует, что для уменьшения надо увеличивать величину , либо уменьшать  , что повышает быстродействие системы.
, что повышает быстродействие системы.
Частотные оценки качества
Частотные оценки качества базируются на связи частотных и временных характеристик системы управления, в частности, на связи переходной функции замкнутой системы  и вещественной частотной характеристики
и вещественной частотной характеристики  (4.13). Из (4.13) можно получить две категории оценок, одна из которых строго обоснована и математически доказана, а другая получена на основе построения большого числа переходных процессов для различных и осреднения полученных результатов.
(4.13). Из (4.13) можно получить две категории оценок, одна из которых строго обоснована и математически доказана, а другая получена на основе построения большого числа переходных процессов для различных и осреднения полученных результатов.
Рассмотрим первую группу оценок.

Эти свойства фактически являются следствием теорем о конечном и начальном значениях оригинала в преобразовании Лапласа. Так как для астатических систем

а для статических
то

т. е. является певозрастающей положительной функцией частоты.
- Достаточным условием монотонности переходного проходного процесса, т. е. = 0 %, является выполнение соотношений
На рис. 7.4, а представлены две вещественные частотные характеристики, из которых для первой  = 0 %, а для второй — = 18%.
= 0 %, а для второй — = 18%.
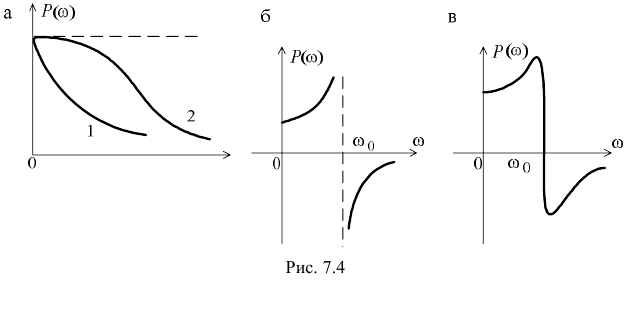
Оценки второй группы, как указывалось выше, имеют приближенный и в значительной степени эмпирический характер.
На рис. 7.5, а, б показаны случаи аппроксимации вещественной характеристики соответственно одной и суммой двух трапецеидальных характеристик.
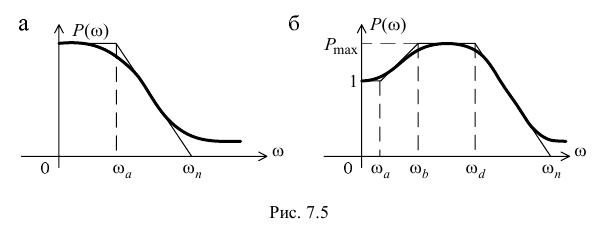
Для случая, изображенного на рис. 7.5, а, время регулирования  оценивается по неравенству
оценивается по неравенству
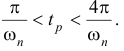
Для случая аппроксимации в виде суммы двух трапеций (см. рис. 7.5, б) время регулирования и перерегулирования а более сложным образом зависит от параметров аппроксимирующих трапеций.
На рис. 7.6 представлены графики зависимостей и от  при
при

На этом рисунке время регулирования построено в относительных единицах, где  — частота среза разомкнутой системы.
— частота среза разомкнутой системы.
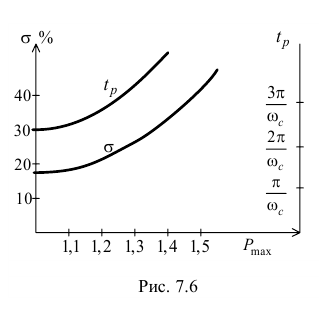
Оценку (7.20) приближенно можно применять и для системы, имеющей произвольную вещественную характеристику .
При этом величину  следует выбирать такой, после которой
следует выбирать такой, после которой 
Для характеристики рис. 7.5, б справедлива такая оценка перерегулирования:
Наряду с оценками качества системы по переходной функции  широкое распространение получили оценки качества системы при отработке гармонических входных сигналов. Особенно это касается исследования следящих систем, для которых изменяющиеся по амплитуде и знаку входные сигналы наиболее характерны. При таком подходе удобнее пользоваться АЧХ замкнутой системы
широкое распространение получили оценки качества системы при отработке гармонических входных сигналов. Особенно это касается исследования следящих систем, для которых изменяющиеся по амплитуде и знаку входные сигналы наиболее характерны. При таком подходе удобнее пользоваться АЧХ замкнутой системы  типичный график которой представлен на рис. 7.7.
типичный график которой представлен на рис. 7.7.
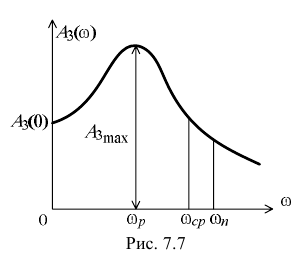
Величина  для астатических систем равна 1, а для статических
для астатических систем равна 1, а для статических  и при большом
и при большом  близка к единице. Частота
близка к единице. Частота  — резонансная частота, при которой
— резонансная частота, при которой  достигает максимального значения
достигает максимального значения  .
.
Частота  — частота среза замкнутой системы, при которой
— частота среза замкнутой системы, при которой  не совпадает с частотой среза разомкнутой системы, которая обозначается
не совпадает с частотой среза разомкнутой системы, которая обозначается  ). Интервал частот
). Интервал частот  определяет полосу пропускания системы. Величина
определяет полосу пропускания системы. Величина  может задаваться из условий точности воспроизведения гармонического сигнала (см. подраздел 6.3).
может задаваться из условий точности воспроизведения гармонического сигнала (см. подраздел 6.3).
Частота со косвенно характеризует время регулирования в замкнутой системе, которое оценивается величиной
Для оценки склонности системы к колебаниям вводят так называемый показатель колебательности, который определяется как
либо иногда как

Так как  для астатических и
для астатических и  для статических систем при большом коэффициенте усиления
для статических систем при большом коэффициенте усиления  разомкнутой системы, то отличие выражений (7.21), (7.22) друг от друга незначительно.
разомкнутой системы, то отличие выражений (7.21), (7.22) друг от друга незначительно.
Физически показатель колебательности  характеризует склонность системы к колебаниям: чем больше , тем более колебательный характер переходного процесса. Этот показатель имеет менее прозрачный смысл, чем, например, время регулирования
характеризует склонность системы к колебаниям: чем больше , тем более колебательный характер переходного процесса. Этот показатель имеет менее прозрачный смысл, чем, например, время регулирования  и перерегулирование
и перерегулирование  . Считается, что если не превосходит величины 1,2 — 1,3, то качество процессов в системе будет удовлетворительным и при других внешних воздействиях, отличных от гармонических.
. Считается, что если не превосходит величины 1,2 — 1,3, то качество процессов в системе будет удовлетворительным и при других внешних воздействиях, отличных от гармонических.
Величина также косвенно характеризует запасы устойчивости системы: чем больше , тем меньше запасы устойчивости. Однако количественно связать и величины  не удается.
не удается.
Для определения величины можно воспользоваться графиком АЧХ разомкнутой системы  . Пусть
. Пусть

Тогда

откуда

или

где
Задавая  и находя
и находя  и
и  по уравнению (7.23) в комплексной плоскости
по уравнению (7.23) в комплексной плоскости  получим кривые, которые будут представлять собой окружности радиусом с центрами на действительной оси. Эти окружности для разных значений
получим кривые, которые будут представлять собой окружности радиусом с центрами на действительной оси. Эти окружности для разных значений  приведены на рис. 7.8.
приведены на рис. 7.8.
Все эти окружности (линии равных значений ) охватывают при < 1 начало координат, а при > 1 — точку с координатам  . При = 1 они вырождаются в прямую.
. При = 1 они вырождаются в прямую.
На рис. 7.8 нанесен график АЧХ

Фактически представленная серия кривых при является номограммой для определения  по кривой
по кривой  . В точках пересечения и соответствующей кривой находим для заданного значения
. В точках пересечения и соответствующей кривой находим для заданного значения  величину .
величину .
Из рис. 7.8 видим, что при  величина
величина  , при
, при  величина
величина  и т. д. Очевидно, что показатель колебательности определится в точке касания годографа с окружностью, имеющей максимальное значение . Для данного случая видно, что это будет окружность, соответствующая = 1,5.
и т. д. Очевидно, что показатель колебательности определится в точке касания годографа с окружностью, имеющей максимальное значение . Для данного случая видно, что это будет окружность, соответствующая = 1,5.
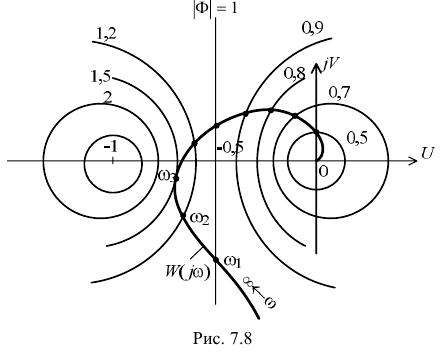
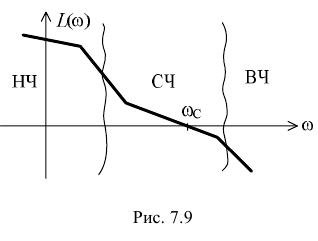
Из рис. 7.8 видно, что чем больше величина (или ) для данной системы, тем ближе АФЧХ подходит к точке с координатами , тем меньше у системы будут запасы устойчивости.
Наконец, возможна оценка качественных показателей системы по виду логарифмических частотных характеристик разомкнутой системы. Всю характеристику можно условно разбить по оси частот на три диапазона, как это показано на рис. 7.9, где НЧ — диапазон низких частот, СЧ — средних и ВЧ — высоких частот.
Логарифмическая характеристика  в диапазоне НЧ влияет на точностные характеристики системы, так как первая асимптота определяется двумя величинами:
в диапазоне НЧ влияет на точностные характеристики системы, так как первая асимптота определяется двумя величинами:  — коэффициентом усиления разомкнутой системы и
— коэффициентом усиления разомкнутой системы и  — порядком астатизма. Область средних частот вблизи частоты среза
— порядком астатизма. Область средних частот вблизи частоты среза  в значительной степени определяет такие показатели системы, как запасы устойчивости
в значительной степени определяет такие показатели системы, как запасы устойчивости  , время регулирования перерегулирование , величину показателя колебательности . Связать указанные параметры непосредственно с параметрами произвольной ЛАЧХ достаточно трудно. Однако для ряда частных случаев ЛАЧХ путем экспериментальных исследований получены графические зависимости, связывающие указанные величины. Отметим лишь одно общее свойство: чем больше величина , тем меньше время регулирования. Кроме этого, считается, что для получения приемлемых показателей качества и обеспечения устойчивости желательно, чтобы наклон асимптоты на частоте среза был -20 дБ/дек, а ее протяженность — не менее одной декады.
, время регулирования перерегулирование , величину показателя колебательности . Связать указанные параметры непосредственно с параметрами произвольной ЛАЧХ достаточно трудно. Однако для ряда частных случаев ЛАЧХ путем экспериментальных исследований получены графические зависимости, связывающие указанные величины. Отметим лишь одно общее свойство: чем больше величина , тем меньше время регулирования. Кроме этого, считается, что для получения приемлемых показателей качества и обеспечения устойчивости желательно, чтобы наклон асимптоты на частоте среза был -20 дБ/дек, а ее протяженность — не менее одной декады.
Область ВЧ существенного влияния на динамику системы не оказывает, поэтому при анализе ее обычно не учитывают.
Уравнения состояния линейных систем
Рассматриваемые в предыдущих разделах системы относятся к простейшему (классическому) типу САУ, характеризуемому одной регулируемой координатой (одномерные системы). Динамические процессы в них удобно описывать одним дифференциальным уравнением  -го порядка, передаточными функциями и частотными характеристиками. При описании многомерных или многосвязных систем, имеющих несколько регулируемых координат, такой подход встречает определенные трудности. Более естественной формой математического описания многомерных систем является векторно-матричная форма уравнений динамики или подход, базирующийся на применении уравнений состояния.
-го порядка, передаточными функциями и частотными характеристиками. При описании многомерных или многосвязных систем, имеющих несколько регулируемых координат, такой подход встречает определенные трудности. Более естественной формой математического описания многомерных систем является векторно-матричная форма уравнений динамики или подход, базирующийся на применении уравнений состояния.
Преимуществом математических моделей в виде уравнений состояния является универсальность (применимость как для одномерных, так и для многомерных систем), компактность формы записи, а также более естественная форма записи для численных расчетов на ЭВМ. В силу этого с конца 60 годов XX столетия в теории управления развиваются методы описания и исследования САУ на базе уравнений состояния.
При математическом описании любой системы всегда можно выделить три группы величин:  — входные сигналы, действующие на систему, включающие как управляющие, так и возмущающие сигналы;
— входные сигналы, действующие на систему, включающие как управляющие, так и возмущающие сигналы;  — выходные сигналы, несущие информацию о поведении системы, а также переменные
— выходные сигналы, несущие информацию о поведении системы, а также переменные  характеризующие непосредственно саму систему (переменные состояния). Физический смысл переменных
характеризующие непосредственно саму систему (переменные состояния). Физический смысл переменных  и
и  достаточно ясен. Переменные состояния
достаточно ясен. Переменные состояния  — это минимальный набор физических или абстрактных величин, который полностью определяет состояние системы в любой момент времени.
— это минимальный набор физических или абстрактных величин, который полностью определяет состояние системы в любой момент времени.
Объединим соответствующие группы переменных в векторы:

вектор входа системы,

вектор выхода системы (вектор наблюдения),

вектор состояния,  — евклидовы пространства соответствующих размерностей. Пространство
— евклидовы пространства соответствующих размерностей. Пространство  носит название пространства состояний.
носит название пространства состояний.
Так как нас интересует поведение системы во времени, т. е. динамика системы, то все соответствующие переменные и векторы будем полагать в дальнейшем функциями текущего времени  , т. е.
, т. е.

Под математической моделью системы будем понимать соотношения между векторами  , описываемые при помощи математических операций и позволяющие однозначно определять закон изменения во времени вектора выхода
, описываемые при помощи математических операций и позволяющие однозначно определять закон изменения во времени вектора выхода  при заданном векторе
при заданном векторе  входа и и начальном состоянии системы.
входа и и начальном состоянии системы.
В случае непрерывных систем наиболее общей формой математической модели являются уравнения следующего вида:

где

вектор-функции соответствующих размерностей;  — скалярные функции.
— скалярные функции.
Уравнения (8.1) носят названия уравнений состояния, первое из которых будем называть уравнением входа, а второе — уравнением выхода.
Уравнения (8.1) описывают динамику нелинейной нестационарной непрерывной системы с сосредоточенными параметрами. Если в явном виде не зависят от времени , то имеем соответствующую модель стационарной системы.
Если в некоторой области изменения переменных функции являются линейными, то уравнения (8.1) превращаются в линейные уравнения состояния

где  — соответственно матрицы размерностей
— соответственно матрицы размерностей


Если коэффициенты всех матриц не зависят в явном виде от времени, то имеем модель линейной стационарной системы. Если хотя бы один из коэффициентов этих матриц в явной виде зависит от , то модель будет нестационарной.
Для физически реализуемых систем всегда  (здесь и далее равенство матрицы нулю подразумевает равенство нулевой матрице) и чаще всего рассматриваются уравнения состояния вида
(здесь и далее равенство матрицы нулю подразумевает равенство нулевой матрице) и чаще всего рассматриваются уравнения состояния вида

Матрица  называется основной матрицей системы,
называется основной матрицей системы,  — матрицей входа,
— матрицей входа,  — матрицей выхода,
— матрицей выхода,  — матрицей связи.
— матрицей связи.
В данном разделе будем рассматривать только линейные стационарные системы, описываемые уравнениями (8.2), (8.3).
Отметим ряд дополнительных моментов, касающихся приведенных моделей систем:
1.Для полного описания поведения системы всегда требуется задать ее начальное состояние в некоторый момент времени (чаще всего нулевой). Это соответствует заданию начальных условий для дифференциальных уравнений, входящих в (8.1) — (8.3). Итак, в (8.1) — (8.3) всегда подразумевается задание  .Чаще всего = 0.
.Чаще всего = 0.
Задача №8.1.
Рассмотрим САУ стандартной структуры, изображенной на рис. 8.1. Пусть

а выход звена  (соответственно вход
(соответственно вход  ) обозначим через
) обозначим через  .
.
При этом несложно получить следующие уравнения:

а после введения новых переменных  — уравнения состояния
— уравнения состояния
Векторно-матричная модель системы будет иметь вид
Схемы моделирования и виды уравнений состояния
В зависимости от структуры матрицы в (8.3) из общего класса уравнений состояния выделяют два подкласса. Если матрица в (8.3) является диагональной
или в общем случае представлена в форме Жордана, то имеем каноническую форму уравнений состояния. Примером матрицы в форме Жордана может служить матрица
размерностью 4×4, имеющая одну клетку Жордана размерностью 3Х3. Если матрица в (8.3) представлена в виде
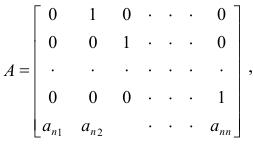
то уравнения состояния имеют нормальную форму. Матрицу такой структуры называют сопровождающей матрицей или матрицей Фробениуса.
Пусть в уравнении (8.3) матрица 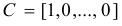 , т. е.
, т. е. 
 и матрица
и матрица  является матрицей Фробениуса (8.6).
является матрицей Фробениуса (8.6).
Тогда, очевидно,
т. е. в качестве переменных состояния выбрана сама выходная координата  и ее производные. В этом частном случае вектор состояния называют фазовым вектором, а пространство состояния — фазовым пространством.
и ее производные. В этом частном случае вектор состояния называют фазовым вектором, а пространство состояния — фазовым пространством.
Для более ясного понимания внутренней структуры и взаимосвязи отдельных переменных системы, описываемой уравнениями состояния, применяют графическую интерпретацию уравнений состояния в виде структурных схем, которые иногда называют схемами моделирования. При этом используются основных блока, показанные на рис. 8.1: а) сумматор  , б) интегратор
, б) интегратор  , в) блок преобразования (усиления)
, в) блок преобразования (усиления)  , где — некоторая матрица.
, где — некоторая матрица.
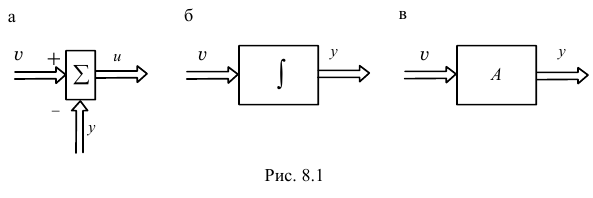
Используя указанные блоки, можно изобразить схему моделирования по уравнениям (8.2), представленную на рис. 8.2.
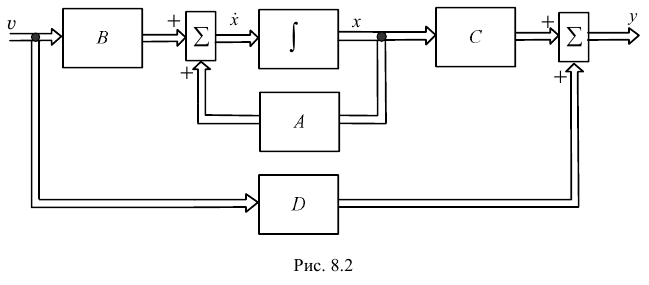
Задача №8.2.
Рассмотрим САУ из примера 8.1. В соответствии с полученными уравнениями состояния (8.4) нетрудно изобразить схему моделирования, представленную на рис. 8.3.
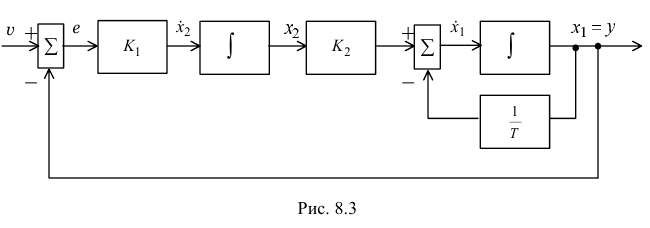
Для этого же примера получим другую структуру схемы моделирования и соответственно другую форму уравнений состояния. Выходной сигнал и сигнал ошибки  можно связать следующим уравнением в области изображений:
можно связать следующим уравнением в области изображений:

откуда нетрудно получить дифференциальное уравнение разомкнутой системы

С учетом уравнения замыкания  получим дифференциальное уравнение замкнутой системы
получим дифференциальное уравнение замкнутой системы

в соответствии с которым нетрудно получить схему моделирования (рис. 8.4).
Если обозначить выходы интеграторов через  и
и  , как показано на рис. 8.4, то можно в соответствии со схемой моделирования записать следующие уравнения:
, как показано на рис. 8.4, то можно в соответствии со схемой моделирования записать следующие уравнения:

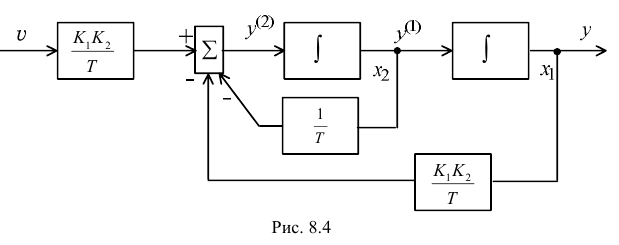
Вводя вектор состояния  уравнения представим в виде
уравнения представим в виде

Уравнения (8.4) и (8.7) имеют различный вид, как и схемы моделирования (см. рис. 8.3 и 8.4), но описывают одну и ту же систему. Уравнения состояния (8.7) имеют нормальную форму, они составлены относительно фазовых координат.
Преобразование уравнений состояния
Пусть система описывается уравнениями состояния общего вида (8.3). Сделаем в этих уравнениях замену переменных

новый вектор состояния,  — произвольная матрица размерностью
— произвольная матрица размерностью  с постоянными коэффициентами. На матрицу накладывается единственное ограничение — она должна быть невырожденной (неособенной), т. е. определитель этой матрицы
с постоянными коэффициентами. На матрицу накладывается единственное ограничение — она должна быть невырожденной (неособенной), т. е. определитель этой матрицы  . В этом случае всегда существует обратная матрица, которую будем обозначать через
. В этом случае всегда существует обратная матрица, которую будем обозначать через  такая, что
такая, что  где
где  — единичная матрица размерностью . Очевидно, что при этих условиях существует однозначная связь между векторами
— единичная матрица размерностью . Очевидно, что при этих условиях существует однозначная связь между векторами  и
и 
 .
.
В уравнениях (8.3) сделаем замену  и с учетом того, что
и с учетом того, что  , получим
, получим

Уравнения (8.8) будут новыми уравнениями состояния, имеющими основную матрицу системы  , входа
, входа  и выхода
и выхода  . Так как — произвольная матрица, то исходным уравнениям (8.3) соответствует бесчисленное количество эквивалентных уравнений состояния (8.8).
. Так как — произвольная матрица, то исходным уравнениям (8.3) соответствует бесчисленное количество эквивалентных уравнений состояния (8.8).
Отметим, что две матрицы  и
и  , связанные преобразованием
, связанные преобразованием  называются подобными. Подобные матрицы имеют одинаковые собственные значения.
называются подобными. Подобные матрицы имеют одинаковые собственные значения.
Используя линейное преобразование, можно поставить задачу о выборе при исследовании той или иной формы уравнений состояния. Наиболее часто решается задача преобразования исходной системы (8.3) к нормальной или канонической форме уравнений состояния (8.8).
Доказано, что для произвольной матрицы всегда существует невырожденная квадратная матрица размерностью , которую обозначим через  и назовем модальной, такая, что матрица
и назовем модальной, такая, что матрица  будет иметь форму Жордана. Если матрица имеет различные собственные значения (числа)
будет иметь форму Жордана. Если матрица имеет различные собственные значения (числа)  являющиеся корнями характеристического уравнения
являющиеся корнями характеристического уравнения

то матрица будет диагональной:

Таким образом, преобразование произвольной системы уравнений (8.3) к канонической форме всегда возможно. Наиболее просто задача определения модальной матрицы решается для случая различных собственных чисел матрицы , которые обозначим через . Для каждого собственного числа  находится собственный вектор
находится собственный вектор  из решения векторно-матричного уравнения
из решения векторно-матричного уравнения
Матрица, образованная вектор-столбцами  , т. е. матрица
, т. е. матрица
и будет искомой модальной матрицей.
В соответствии с (8.9) при  определитель системы линейных уравнений (8.10) равен нулю, т.е. система имеет бесчисленное множество решений, каждое из которых можно принять за собственный вектор. Отсюда матрица
определитель системы линейных уравнений (8.10) равен нулю, т.е. система имеет бесчисленное множество решений, каждое из которых можно принять за собственный вектор. Отсюда матрица  является неединственной.
является неединственной.
В случае кратных собственных значений матрицы  задача определения модальной матрица значительно усложняется.
задача определения модальной матрица значительно усложняется.
В частности, если исходная матрица является матрицей Фробениуса вида
и собственные числа  являющиеся корнями характеристического уравнения
являющиеся корнями характеристического уравнения

различны, то модальная матрица будет иметь следующий вид:
Задача №8.3.
Пусть в САУ, которая рассматривалась в примерах 8.1 и 8.2,  , тогда уравнения (8.7) будут иметь вид
, тогда уравнения (8.7) будут иметь вид

Преобразуем уравнения состояния к канонической форме. Основная матрица системы является матрицей Фробениуса. Найдем ее собственные значения из решения характеристического уравнения

Корни уравнения будут различными

Таким образом, в соответствии с (8.14) определяем модальную матрицу и обратную ей  :
:

Далее

Итак, уравнения состояния (8.15) преобразуются к канонической форме:

Задача №8.4.
Пусть система описывается уравнениями состояния

Корни характеристического уравнения

будут

Находим собственные векторы из решения системы линейных уравнений

Полагая

будем иметь

Из последних двух уравнений  , откуда, задавая, например,
, откуда, задавая, например,  , получим
, получим  . Итак, первый собственный вектор
. Итак, первый собственный вектор  . При
. При  в конечном итоге для определения координат второго собственного вектора получим
в конечном итоге для определения координат второго собственного вектора получим  . Полагая
. Полагая  , будем иметь
, будем иметь  и соответственно
и соответственно  . Итак, матрицу можно выбрать в виде
. Итак, матрицу можно выбрать в виде
Окончательно уравнения в канонической форме будут иметь следующий вид:

Нормальная форма уравнений состояния одномерной системы
Пусть динамика одномерной системы, имеющей один вход и один выход, описывается дифференциальным уравнением

где

Требуется найти уравнения состояния (8.3) в нормальной форме, эквивалентные уравнению (8.16).
Задача легко решается для частного случая (8.16), если  , т. е. правая часть (8.16) будет иметь вид
, т. е. правая часть (8.16) будет иметь вид  . В (8.16) сделаем замену переменных
. В (8.16) сделаем замену переменных

Дифференцируя последовательно каждое равенство, получим
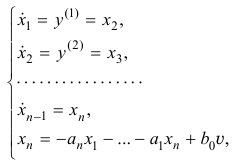
где последнее соотношение соответствует уравнению (8.16). Полученную систему с учетом  , запишем в виде уравнений состояния в нормальной форме:
, запишем в виде уравнений состояния в нормальной форме:
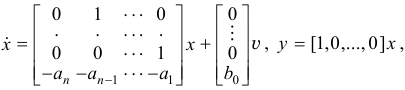
где, как обычно,

Если в (8.16)  , то также можно получить уравнения состояния в нормальной форме. Вывести их несколько сложнее, поэтому дадим конечный результат. Для удобства будем в (8.16) полагать
, то также можно получить уравнения состояния в нормальной форме. Вывести их несколько сложнее, поэтому дадим конечный результат. Для удобства будем в (8.16) полагать  . Очевидно, если
. Очевидно, если  , то ряд первых коэффициентов
, то ряд первых коэффициентов  будет равен нулю. Уравнения состояния в этом случае будут иметь следующий вид:
будет равен нулю. Уравнения состояния в этом случае будут иметь следующий вид:

Коэффициенты  определяются из решения системы линейных алгебраических уравнений, записанных в векторно-матричной форме:
определяются из решения системы линейных алгебраических уравнений, записанных в векторно-матричной форме:
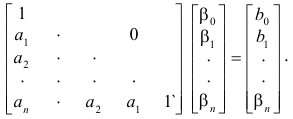
Из (8.19) следует, что

откуда последовательно находятся  .
.
Для физически реализуемых систем и  .
.
Задача №8.5.
Рассмотрим замкнутую систему управления стандартной структуры (см. рис. 8.1), где будем полагать
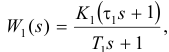

Передаточная функция разомкнутой системы будет равна

Найдем дифференциальное уравнение разомкнутой системы, связывающее  и
и  :
:

Коэффициенты этого уравнения


Уравнение для определения имеет следующий вид:
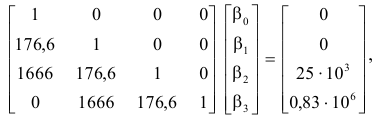
откуда

Итак, уравнения состояния разомкнутой системы в нормальной форме имеют вид

Для получения уравнений состояния замкнутой системы учтем уравнение замыкания

после подстановки которого в (8.20) получим

Уравнения состояния замкнутой системы (8.21) уже не являются уравнениями в нормальной форме.
Каноническая форма уравнений состояния одномерной системы
Для получения уравнений состояния одномерной системы в канонической форме используется передаточная функция системы. Будем полагать, что система описывается дифференциальным уравнением (8.16), которому соответствует передаточная функция

Пусть характеристическое уравнение системы имеет  различных корней
различных корней  , тогда передаточную функцию можно представить в виде
, тогда передаточную функцию можно представить в виде

Очевидно, что в этом случае
Обозначим
тогда

Перейдем в операторных соотношениях к оригиналам, полагая
Получим

Вводя вектор состояния  запишем полученные уравнения в виде уравнений состояния
запишем полученные уравнения в виде уравнений состояния
Итак, получили уравнения состояния в канонической форме с диагональной матрицей коэффициентов, где в общем случае элементы  матриц могут быть и комплексными величинами.
матриц могут быть и комплексными величинами.
Из (8.22) можно получить другую каноническую форму уравнений состояния. Если обозначить
то проводя аналогичные рассуждения, получим следующие уравнения состояния:

Рассмотрим теперь случай кратных корней. Пусть характеристическое уравнение имеет корни  кратности
кратности  , а остальные корни простые
, а остальные корни простые  . Тогда передаточную функцию можно представить в виде разложения
. Тогда передаточную функцию можно представить в виде разложения
В этом случае


Между изображениями  существует связь
существует связь 
 Полагая
Полагая  и переходя к оригиналам, получим в области оригиналов:
и переходя к оригиналам, получим в области оригиналов:

Вводя вектор состояния  , полученные соотношения запишем в векторно-матричной форме:
, полученные соотношения запишем в векторно-матричной форме:
Уравнения состояния (8.25) имеют каноническую форму, основная матрица — форму Жордана. Корню кратности  соответствует клетка Жордана размерностью
соответствует клетка Жордана размерностью  . Очевидно, при наличии нескольких кратных корней будем получать соответствующие клетки Жордана для каждого корня.
. Очевидно, при наличии нескольких кратных корней будем получать соответствующие клетки Жордана для каждого корня.
Задача №8.6.
Обратимся к системе управления из примера 8.5 и найдем уравнения состояния в канонической форме для разомкнутой системы. Характеристическое уравнение разомкнутой системы

имеет три различных корня

Используя выражение
находим величины  :
:


Таким образом, уравнения состояния в канонической форме для разомкнутой системы имеют вид

С учетом уравнения замыкания  нетрудно получить следующие уравнения состояния замкнутой системы:
нетрудно получить следующие уравнения состояния замкнутой системы:

Сравнивая (8.21) и (8.26), видим, что одна и та же система описывается разными уравнениями состояния, которые эквивалентны между собой.
Переходная матрица состояния
Пусть линейная САУ описывается следующие уравнениями состояния:

Рассмотрим матричный ряд, который обозначим через  :
:

где  — единичная
— единичная  матрица.
матрица.
Доказано, что этот ряд абсолютно сходится при любом  к некоторой матрице, обозначенной нами через
к некоторой матрице, обозначенной нами через  (экспоненциал матрицы).
(экспоненциал матрицы).
Свойства ряда (8.28):
При  матрица
матрица  .
.


или в более общем виде
где  — обратная матрица.
— обратная матрица.
Если

Рассмотрим однородное уравнение

соответствующее неоднородному дифференциальному уравнению  , и зададим начальное состояние вектора
, и зададим начальное состояние вектора  при
при  .
.
Общее решение однородного уравнения (8.29) задается выражением
Действительно, подставляя (8.30) в (8.29), с учетом свойства 2 получим тождество, справедливое при любом начальном значении . Это значит, что (8.30) определяет общее решение уравнения (8.29).
Введем обозначение  . Матрицу
. Матрицу  размерностью будем называть переходной матрицей состояния (в математике ей соответствует фундаментальная матрица), а выражение (8.30) в этом случае будем записывать в виде
размерностью будем называть переходной матрицей состояния (в математике ей соответствует фундаментальная матрица), а выражение (8.30) в этом случае будем записывать в виде

Выражение (8.31) можно трактовать как линейное преобразование (переход) начального значения вектора состояния в текущее значение  в пространстве состояний.
в пространстве состояний.
Свойства переходной матрицы состояния:
Эти свойства следуют из общих свойств экспоненциала матрицы. Если известна переходная матрица состояния, то общее решение неоднородного уравнения  записывается в виде (формула Коши):
записывается в виде (формула Коши):
В силу  получим выражение для вычисления вектора выхода
получим выражение для вычисления вектора выхода  :
:

В (8.32), (8.33) первое слагаемое определяет свободную составляющую, обусловленную ненулевым начальным состоянием , а второе — вынужденную составляющую, обусловленную входным сигналом .
Выражение (8.28) редко употребляется для определения матрицы , так как в случае произвольной матрицы  элементы матрицы представляют собой ряды Тейлора при
элементы матрицы представляют собой ряды Тейлора при  , по которым трудно найти исходную функцию в замкнутой форме.
, по которым трудно найти исходную функцию в замкнутой форме.
Переходную матрицу состояния обычно находят с помощью операционного исчисления. Применим к (8.29) преобразование Лапласа, тогда получим

где

Из полученного выражения находим

где  — обратная матрица к матрице
— обратная матрица к матрице  .
.
Переходя к оригиналам, имеем

Сравнивая (8.34) с (8.31), приходим к выводу, что

Каждый элемент матрицы есть дробно-рациональная функция переменной  . Знаменатель каждого элемента представляет собой полином
. Знаменатель каждого элемента представляет собой полином  -й степени
-й степени  , а числитель — полином не выше (-1)-й степени. Полином называется характеристическим полиномом системы, а алгебраическое уравнение -й степени
, а числитель — полином не выше (-1)-й степени. Полином называется характеристическим полиномом системы, а алгебраическое уравнение -й степени

назовем характеристическим уравнением системы.
Применяя к каждому элементу матрицы обратное преобразование Лапласа, получим матрицу , элементами которой будут некоторые функции времени.
Переходную матрицу состояний можно найти, используя модальную матрицу  . Пусть в уравнении (8.29) матрица имеет различные собственные значения
. Пусть в уравнении (8.29) матрица имеет различные собственные значения  . Тогда в (8.29) сделаем замену переменных
. Тогда в (8.29) сделаем замену переменных  , где — модальная матрица. В результате получим:
, где — модальная матрица. В результате получим:

Общее решение полученной системы с диагональной матрицей будет таково:

Так как

то общее решение исходного уравнения (8.29) запишется в виде

Отсюда следует, что

Задача №8.7.
Рассмотрим однородное уравнение в нормальной форме
Собственные числа матрицы определяются из решения уравнения

и будут

Ищем модальную матрицу в виде (8.14):

Находим в соответствии с (8.37):

Можно найти , используя (8.35). Находим и затем .

Переходя от к оригиналам, найдем выражение для матрицы , не отличающееся от полученного ранее.
Передаточная и весовая матрицы
Наряду с переходной матрицей состояния при описании и исследовании линейных многомерных систем находят применение матричные аналоги обычных передаточных функций одномерных систем.
Применим к уравнениям (8.27) преобразование Лапласа, полагая  = 0, тогда получим
= 0, тогда получим  или, исключая из уравнений вектор
или, исключая из уравнений вектор  , получим
, получим

Передаточной матрицей {матричной передаточной функцией)  В будем называть матрицу размерности
В будем называть матрицу размерности  , связывающую изображение вектора входа
, связывающую изображение вектора входа  и вектора выхода
и вектора выхода  .
.
Элементами передаточной матрицы  являются обычные скалярные передаточные функции, связывающие
являются обычные скалярные передаточные функции, связывающие  -й выход
-й выход  с
с  — м входом
— м входом  при условии, что все остальные входы равны нулю. Передаточная функция есть отношение двух полиномов относительно . Полином знаменателя является для всех одним и тем же и равен
при условии, что все остальные входы равны нулю. Передаточная функция есть отношение двух полиномов относительно . Полином знаменателя является для всех одним и тем же и равен  (степень его ), а полиномы числителя будут степени не выше ( — 1).
(степень его ), а полиномы числителя будут степени не выше ( — 1).
В уравнении (8.33) будем полагать = 0. Внесем матрицу  под знак интеграла и запишем это уравнение в виде
под знак интеграла и запишем это уравнение в виде

Матрицу  размерностью
размерностью  будем называть весовой матрицей (импульсной переходной матрицей).
будем называть весовой матрицей (импульсной переходной матрицей).
Смысл её такой же, как и у весовой функции скалярной системы. Элементы  матрицы
матрицы  являются скалярными весовыми функциями. Если -й вход
являются скалярными весовыми функциями. Если -й вход  , а остальные входы равны нулю, то
, а остальные входы равны нулю, то  .
.
Передаточная и весовая матрицы связаны между собой преобразованием Лапласа

Частотные характеристики системы в многомерном случае не нашли широкого применения. Хотя формально сделав в  замену
замену  , можно ввести аналогичные понятия и рассматривать обычных скалярных частотных характеристик
, можно ввести аналогичные понятия и рассматривать обычных скалярных частотных характеристик  .
.
Если уравнения (8.27) описывают одномерную систему, то


В этом случае

будут скалярными функциями.
Задача №8.8.
Рассмотрим систему, имеющую два входа и один выход:

В примере 8.7 найдена матрица  Используя выражение
Используя выражение 
 нетрудно получить передаточную матрицу размерностью 1×2
нетрудно получить передаточную матрицу размерностью 1×2

Весовая матрица будет иметь вид

Устойчивость, управляемость и наблюдаемость линейных систем
Рассмотрим линейную систему, описываемую уравнениями состояния (8.27). Устойчивость процессов в системе можно рассматривать по отношению к тем или иным переменным, характеризующим систему. Очевидно, из (8.27) следует, что поведение системы можно рассматривать по отношению к переменным состояния  (вектору состояния
(вектору состояния  ) или к выходным переменным
) или к выходным переменным  (вектору выхода
(вектору выхода  ). Процессы в системе могут быть устойчивы по отношению к одной группе переменных и неустойчивы по отношение к другой. Чаще всего рассматривают устойчивость по отношению к переменным состояния
). Процессы в системе могут быть устойчивы по отношению к одной группе переменных и неустойчивы по отношение к другой. Чаще всего рассматривают устойчивость по отношению к переменным состояния  . За исключением особых случаев это будет справедливо и по отношению к вектору выхода .
. За исключением особых случаев это будет справедливо и по отношению к вектору выхода .
Закон изменения вектора состояния определяется выражением (8.32). В случае линейной системы устойчивость процессов в ней зависит только от поведения свободной составляющей  , обусловленной начальным значением вектора состояния, т. е. составляющей
, обусловленной начальным значением вектора состояния, т. е. составляющей
Пусть корни характеристического уравнения системы
соответствующего системе (8.27), будут все различные  , тогда переходная матрица состояния
, тогда переходная матрица состояния  представима в виде (8.34), где
представима в виде (8.34), где  — модальная матрица, элементы которой не зависят от времени. В этом случае (8.41) запишем в виде
— модальная матрица, элементы которой не зависят от времени. В этом случае (8.41) запишем в виде

Процессы в системе автоматического управления по отношению к переменным состояния  будут асимптотически устойчивы, если при любом начальном значении
будут асимптотически устойчивы, если при любом начальном значении  свободная составляющая (8.43) с течением времени затухает, т. е.
свободная составляющая (8.43) с течением времени затухает, т. е.

Процессы в системе будут просто устойчивы, если

неустойчивы, если хотя бы для одной координаты
В соответствии с тремя рассматриваемыми случаями будем говорить об асимптотически устойчивой, устойчивой (нейтральной или находящейся на границе устойчивости) и неустойчивой линейных системах.
Из приведенных определений и анализа выражения (8.43) следует, что система будет асимптотически устойчивой, если все действительные части корней  строго отрицательны, т. е.
строго отрицательны, т. е.

Система будет просто устойчивой, если

и неустойчивой, если для некоторого корня  .
.
Наличие кратных корней не меняет полученных результатов относительно асимптотической устойчивости и неустойчивости.
Таким образом, необходимым и достаточным условием асимптотической устойчивости системы (8.27) является отрицательность действительных частей всех корней характеристического уравнения (8.42), т. е. все 

Если в (8.42) раскрыть определитель, то в результате получим уравнение

где  определяются через элемент
определяются через элемент  матрицы
матрицы  .
.
К последнему уравнению обычным путем можно применить известные критерий устойчивости (Гурвица, Рауса, Михайлова и т.п.).
Прежде чем сформулировать в общем виде понятия, связанные с управляемостью и наблюдаемостью систем, рассмотрим частный случай. Пусть система управления с одним входом и одним выходом описывается уравнениями состояния

где  матрица;
матрица;

Предположим, что матрица имеет различные собственные значения Сделаем в (8.44) замену  , где — модальная матрица размерностью
, где — модальная матрица размерностью  . В результате приходим к канонической форме уравнений состояния
. В результате приходим к канонической форме уравнений состояния

где

Скалярный элемент  получается перемножением
получается перемножением  -й строки матрицы
-й строки матрицы  на столбец
на столбец  , а элемент
, а элемент  — перемножением строки на -ю строку матрицы .
— перемножением строки на -ю строку матрицы .
Уравнения (8.45) запишем в скалярном виде:

На рис. 8.5 по уравнениям (8.46) построена схема моделирования.
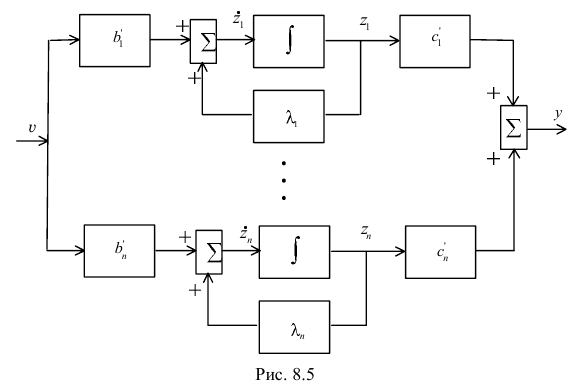
Из этого рисунка следует, что внутренняя структура системы представляет параллельное соединение  однотипных ветвей, соответствующих каждому характеристическому числу.
однотипных ветвей, соответствующих каждому характеристическому числу.
Если все отличны от нуля, то с помощью входного сигнала и можно влиять на все координаты  (управлять ими). Однако при определенных условиях в зависимости от значений элементов матриц и могут возникнуть случаи, когда один или несколько коэффициентов
(управлять ими). Однако при определенных условиях в зависимости от значений элементов матриц и могут возникнуть случаи, когда один или несколько коэффициентов  , будут равны нулю. Тогда одна или несколько координат не будут зависеть от входного сигнала
, будут равны нулю. Тогда одна или несколько координат не будут зависеть от входного сигнала  , не будут им управляться, т. е. соответствующая цепь оказывается разорванной по входу.
, не будут им управляться, т. е. соответствующая цепь оказывается разорванной по входу.
Аналогичная картина может наблюдаться по отношению к выходу . Если все отличны от нуля, то в выходном сигнале присутствуют (наблюдаются) все координаты . Если же один или несколько коэффициентов равны нулю, то соответствующие переменные состояния не могут быть измерены или не наблюдаются. В данном случае имеем разрыв во внутренней структуре системы на выходе соответствующих цепей.
Из рассмотренного примера, в частности, следует, что система, описываемая уравнениями (8.44), будет полностью управляемой и полностью наблюдаемой, если все элементы матриц

будут отличны от нуля.
Коэффициенты определяются коэффициентами матрицы и собственными числами матрицы , т. е. фактически коэффициентами матрицы . Отсюда следует, что управляемость системы зависит только от пары матриц и . Аналогично наблюдаемость будет зависеть от пары матриц и  .
.
Если система полностью управляема и наблюдаема, то порядок передаточной функции системы

будет совпадать с порядком дифференциального уравнения в (8.44) и будет равен . В случае неполной управляемости или наблюдаемости порядок передаточной функции будет меньше, чем . Этот результат следует из структуры (см. рис. 8.5), так как в этом случае в части каналов нет связи между и  . Например, если или равны нулю, то порядок передаточной функции будет ( — 1), хотя порядок системы (8.44) равен . Отсюда следует, что передаточная функция характеризует только полностью управляемую и наблюдаемую часть системы.
. Например, если или равны нулю, то порядок передаточной функции будет ( — 1), хотя порядок системы (8.44) равен . Отсюда следует, что передаточная функция характеризует только полностью управляемую и наблюдаемую часть системы.
Рассмотрим теперь свойства устойчивости системы в связи с ее управляемостью и наблюдаемостью. Пусть, например,  , а все остальные
, а все остальные

В этом случае по отношению к координатам  (то же самое ) система неустойчива. Если в этом случае система не наблюдаема по координате
(то же самое ) система неустойчива. Если в этом случае система не наблюдаема по координате

и неустойчивая координата не влияет на выход системы. По отношению к выходу система будет вести себя как устойчивая. Отсюда следует, что если система полностью наблюдаема, то устойчивость по отношению к переменным состояния (иногда ее называют внутренней устойчивостью) будет совпадать с устойчивостью по отношению к выходной координате (внешней устойчивостью). В случае ненаблюдаемой системы это условие может не выполняться.
Будем полагать, что уравнения (8.44) описывают объект управления. Регулятор, управляющий этим объектом (выход регулятора это сигнал ), формирует сигнал управления, используя выходной сигнал . Пусть объект управления является неустойчивым и неуправляемым  по координате
по координате  , тогда какой бы регулятор мы не применили, с помощью обратной связи и регулятора невозможно сделать систему устойчивой, так как разорвана на входе первая цепь. Говорят, что в этом случае объект является не стабилизируемым.
, тогда какой бы регулятор мы не применили, с помощью обратной связи и регулятора невозможно сделать систему устойчивой, так как разорвана на входе первая цепь. Говорят, что в этом случае объект является не стабилизируемым.
Дадим более строгие определения управляемости и наблюдаемости линейной системы (8.44) общего вида, т.е. в (8.44) будем полагать 
 — матрицы соответствующих размерностей. Обозначим значения вектора состояния
— матрицы соответствующих размерностей. Обозначим значения вектора состояния  при
при 
Система (8.44) называется полностью управляемой, если для любых моментов времени  и
и  и любых заданных состояний и
и любых заданных состояний и  существует управление
существует управление  , переводящее начальное состояние в конечное .
, переводящее начальное состояние в конечное .
Состояние  системы (8.44) называется наблюдаемым, если в момент наблюдения
системы (8.44) называется наблюдаемым, если в момент наблюдения  можно однозначно определить по данным измерения
можно однозначно определить по данным измерения  и
и  на конечном интервале времени
на конечном интервале времени  . Система (8.44) называется полностью наблюдаемой, если наблюдаемы все ее состояния в любые моменты времени.
. Система (8.44) называется полностью наблюдаемой, если наблюдаемы все ее состояния в любые моменты времени.
Американским ученым Р. Калманом были предложены критерии управляемости и наблюдаемости. Вводятся в рассмотрение матрица управляемости

и матрица наблюдаемости

Матрица  имеет размерность
имеет размерность  , а матрица
, а матрица  — размерность
— размерность  , символ
, символ  означает операцию транспортирования матрицы.
означает операцию транспортирования матрицы.
Столбцами матрицы являются столбцы матриц
Аналогично столбцы матрицы — это столбцы матриц

Если уравнения (8.44) описывают одномерную систему, то  и
и  будут квадратными матрицами размерности
будут квадратными матрицами размерности  .
.
Критерий управляемости и наблюдаемости. Система (8.44) является полностью управляемой только тогда, когда ранг матрицы управляемости равен  , и полностью наблюдаемой только тогда, когда ранг матрицы наблюдаемости равен .
, и полностью наблюдаемой только тогда, когда ранг матрицы наблюдаемости равен .
Напомним, что под рангом матрицы понимается максимальный порядок ее минора, отличного от нуля.
Задача №8.9.
Рассмотрим одномерную систему второго порядка

Основная матрица системы  является сопровождающей. Предположим, что ее собственные числа
является сопровождающей. Предположим, что ее собственные числа  являющиеся корнями уравнения
являющиеся корнями уравнения  , различны (следовательно
, различны (следовательно ). Приведем систему к канонической форме с помощью преобразования
). Приведем систему к канонической форме с помощью преобразования
В результате:


По уравнениям (8.47) найдем передаточную функцию системы

Пусть

Очевидно,


Система является ненаблюдаемой по координате  ). Подстановка значений коэффициентов в передаточную функцию дает
). Подстановка значений коэффициентов в передаточную функцию дает

т. е. передаточная функция 2-го порядка вырождается в передаточную функцию 1-го порядка.
Если выбрать, например,

то система будет неуправляема по второй координате  .
.
Таким образом, система с уравнениями состояния

является неуправляемой по одной из внутренних координат и ненаблюдаемой по другой. При этом передаточная функция (8.48) при  вообще вырождается в нулевую
вообще вырождается в нулевую  и между переменными
и между переменными  и
и  отсутствует всякая связь. Очевидно, по виду уравнения (8.49) трудно было бы предвидеть такие результаты.
отсутствует всякая связь. Очевидно, по виду уравнения (8.49) трудно было бы предвидеть такие результаты.
К (8.49) применим критерий управляемости и наблюдаемости

Ранг обеих матриц меньше двух (равен единице). Система не полностью управляема и не полностью наблюдаема.
Синтез систем автоматического управления
Рассмотренные до сих пор разделы касались задач математического описания элементов и систем, анализа их динамических свойств, различных качественных показателей и влияния на них отдельных параметров.
Конечной же целью анализа САУ является обратная задача: синтез системы, удовлетворяющей функциональному назначению и заданным качественным показателям. При этом частными случаями синтеза могут быть следующие задачи: обеспечения устойчивости (стабилизации), повышения точности, улучшения быстродействия, оптимизации каких-либо показателей качества.
К настоящему времени разработан ряд методов синтеза линейных систем. Их можно разделить на 3 группы. Графоаналитическая группа включает методы: корневые, стандартных переходных характеристик и частотные; аналитическая — синтез САУ по интегральным критериям качества, с использованием вариационного исчисления, динамического программирования, принципа максимума, аналитического конструирования регуляторов, модального управления; наконец, к третьей группе относятся методы прямого синтеза с использованием компьютерного моделирования. Наиболее распространенными являются частотный метод, относящийся к классическим, и метод модального управления, относящийся к современным. Естественно, что и тот и другой дополняются расчетами на ПЭВМ.
При выборе метода синтеза необходимо учитывать режимы работы системы. Пусть модель САУ имеет вид
где  — возмущение.
— возмущение.
Как известно,

Первая (свободная) составляющая в этом выражении соответствует режиму отработки начальных условий при  ; вторая (вынужденная) составляющая соответствует режиму отработки входа при нулевых начальных условиях; третья (вынужденная) составляющая отражает процесс отработки возмущений при фиксированных начальных условиях и входном воздействии.
; вторая (вынужденная) составляющая соответствует режиму отработки входа при нулевых начальных условиях; третья (вынужденная) составляющая отражает процесс отработки возмущений при фиксированных начальных условиях и входном воздействии.
При расчете САУ, отрабатывающих входные воздействия, предпочтительнее частотный метод; при синтезе САУ, работающих в режиме отработки начальных условий и возмущений, — модальный метод.
При постановке задачи синтеза одномерной САУ в качестве цели работы системы выдвигается требование обеспечить с заданной точностью равенство выходной координаты  и входного воздействия
и входного воздействия  при
при  (условие статики) при выполнении требований к динамике: обеспечение заданного времени переходного процесса и перерегулирования. Если объект управления сложный, необходимо оценить возможность выполнения синтеза. При этом рассматриваются следующие ограничения:
(условие статики) при выполнении требований к динамике: обеспечение заданного времени переходного процесса и перерегулирования. Если объект управления сложный, необходимо оценить возможность выполнения синтеза. При этом рассматриваются следующие ограничения:
- ресурсное ограничение, связанное с формированием управляющего воздействия на объект по мощности, величине линейной зоны и т.п.;
- устойчивость «обратных» объектов или его частей, связанная с сокращаемыми (передаточными или другими) сомножителями;
- условие управляемости; в случае не полностью управляемой системы -устойчивость неуправляемой части;
- условие наблюдаемости, в случае не полностью наблюдаемой САУ -устойчивость ненаблюдаемой части.
При решении задачи синтеза САУ центральным вопросом является проектирование регулятора по заданным требованиям к статическим и динамическим показателям САУ.
Корректирующие устройства
Любое устройство, включаемое в систему управления с целью изменения ее свойств для обеспечения заданных показателей качества, можно рассматривать как корректирующее. По способу включения корректирующие устройства делятся на последовательные, параллельные, встречно-параллельные (местные обратные связи), которые соответственно представлены на рис. 9.1, а, б, в. Обозначим передаточную функцию последовательного корректирующего устройства  параллельного
параллельного  и встречно-параллельного
и встречно-параллельного  .
.
При отсутствии корректирующего устройства любого типа передаточная функция разомкнутой системы, как это видно из рис. 9.1, будет равна

Включение корректирующего устройства изменяет передаточную функцию прямой цепи, которая соответственно для рис. 9.1, а, б, в будет иметь следующий вид:
Приравнивая попарно соотношения (9.1) — (9.3), можно найти связь одного типа коррекции с любым другим и выбрать нужный тип коррекции, исходя из технических возможностей.
Отметим, что вид передаточной функции скорректированной системы зависит не только от вида передаточной функции корректирующего устройства  , но и от места включения звеньев
, но и от места включения звеньев  в прямой цепи.
в прямой цепи.
Представленные на рис. 9.1 способы включения корректирующих устройств видоизменяют передаточную функцию прямой цепи, не изменяя принципов управления.
В качестве корректирующего устройства может использоваться любое устройство, реализующее требуемую передаточную функцию. Выбор того или иного устройства, а также способа коррекции часто обусловлен техническими возможностями и с этой точки зрения достаточно субъективен.
Наиболее часто в электромеханических системах управления корректирующие устройства реализуются в виде пассивных или активных четырехполюсников, содержащих резисторы, конденсаторы (реже индуктивности) и в случае активных четырехполюсников — операционные усилители. Такие четырехполюсники можно применять в системах управления, у которых сигналы управления представляют собой напряжение постоянного тока.
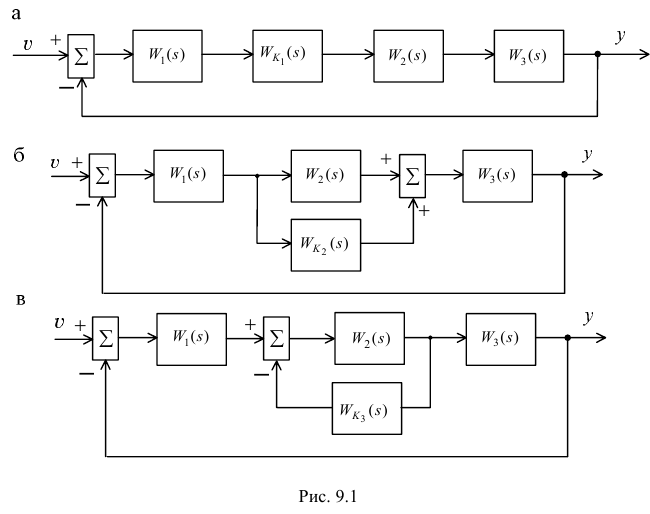
Последовательные корректирующие устройства
Последовательные корректирующие устройства включаются в прямую цепь системы управления в соответствии с рис. 9.1, а.
При последовательной коррекции передаточная функция разомкнутой скорректированной системы будет равна

Выбором передаточной функции можно добиться требуемой передаточной функции  , обеспечивающей желаемые свойства системы.
, обеспечивающей желаемые свойства системы.
Последовательная коррекция часто применяется для обеспечения заданной точности системы. В этом случае передаточная функция корректирующего устройства выбирается в виде
т. е. в прямую цепь системы вводится усилительное звено с коэффициентом усиления  , и интегрирующее звено с передаточной функцией
, и интегрирующее звено с передаточной функцией  , так что
, так что
Выбор величин и  обусловлен необходимой точностью системы в установившихся режимах. Пусть исходная система статическая
обусловлен необходимой точностью системы в установившихся режимах. Пусть исходная система статическая
и требуется, чтобы она имела статическую ошибку  и скоростную ошибку
и скоростную ошибку  . В соответствии с результатами подразд. 6.1 требуется, чтобы скорректированная система обладала астатизмом первого порядка, а общий коэффициент усиления
. В соответствии с результатами подразд. 6.1 требуется, чтобы скорректированная система обладала астатизмом первого порядка, а общий коэффициент усиления  был выбран из условия
был выбран из условия  , откуда
, откуда  где величина
где величина  задана. Таким образом, параметры корректирующего устройства
задана. Таким образом, параметры корректирующего устройства  следует выбрать из условия
следует выбрать из условия  .
.
В случае задания точности системы при отработке гармонического сигнала требуемый общий коэффициент усиления (и соответственно величина ) и порядок астатизма можно найти аналогично, если воспользоваться выражениями (6.17), (6.19).
Наряду с использованием последовательных корректирующих устройств для повышения точности эти устройства могут использоваться и для улучшения показателей качества системы. В этом случае в соответствии с выражением (9.1) выбором  изменяют среднечастотную часть исходной частотной характеристики
изменяют среднечастотную часть исходной частотной характеристики  , добиваясь требуемой частотной характеристики
, добиваясь требуемой частотной характеристики  .
.
Последовательные корректирующие устройства в виде пассивных или активных четырехполюсников обычно включаются после устройства сравнения или между каскадами предварительного усилителя. При этом применяют устройства с отставанием по фазе, с опережением по фазе и с отставанием и опережением по фазе.
На рис. 9.2, а представлены частотные характеристики системы при коррекции с отставанием по фазе. Здесь  — ЛAX исходной системы, Ьж(со) -J1 АХ желаемой (скорректированной) системы,
— ЛAX исходной системы, Ьж(со) -J1 АХ желаемой (скорректированной) системы,  — ЛАХ корректирующего устройства. На рис. 9.2, б изображена цепочка, реализующая эту коррекцию.
— ЛАХ корректирующего устройства. На рис. 9.2, б изображена цепочка, реализующая эту коррекцию.
Комплексная передаточная функция корректирующего устройства равна:

Эта коррекция приводит к повышению устойчивости, подавлению высокочастотных помех, но к снижению быстродействия.
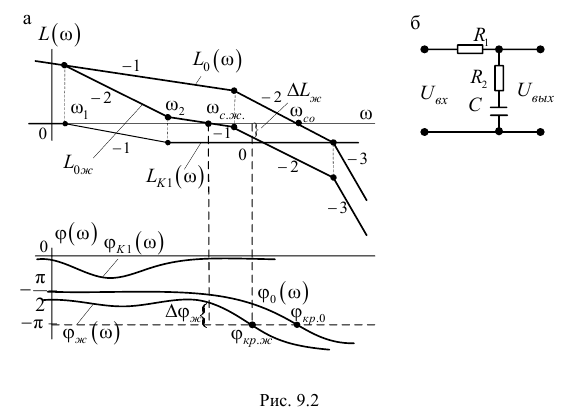
На рис. 9.3 изображены частотные характеристики и цепочка при коррекции с опережением по фазе. Надо помнить, что цепочка вносит ослабление  , которое необходимо скомпенсировать.
, которое необходимо скомпенсировать.
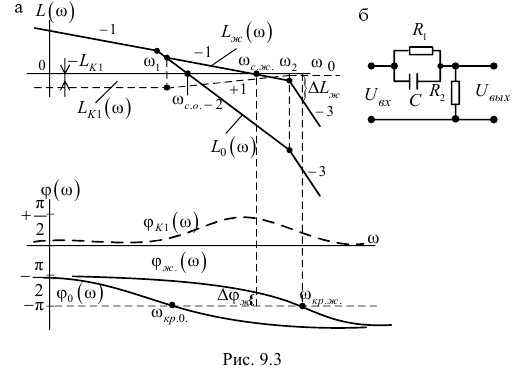
Комплексная передаточная функция корректирующего устройства равна:

Эта коррекция приводит к повышению устойчивости и быстродействия, но к снижению помехоустойчивости на высоких частотах.
Объединение этих двух видов коррекции позволяет расширить среднечастотную зону (рис. 9.4). В этом случае
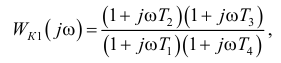
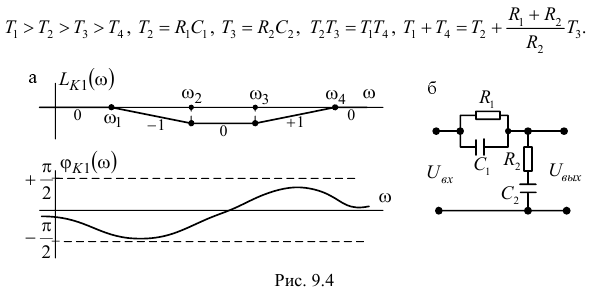
Эта коррекция существенно улучшает качественные показатели САУ.
Параллельные корректирующие устройства
Одним из распространенных способов улучшения качества системы является введение производной от сигнала в прямой цепи. Пусть на рис. 9.1,6 
 , тогда передаточная функция прямой цепи скорректированной системы будет равна
, тогда передаточная функция прямой цепи скорректированной системы будет равна

где

Введение корректирующего устройства изменяет амплитудную и фазовую характеристики системы, которые примут вид
Из (9.7) следует, что введение производной увеличивает положительные фазовые сдвиги и позволяет при соответствующем выборе  в диапазоне частоты среза системы «поднять» фазовую характеристику и увеличить запасы устойчивости. При этом при малых частотах вид частотных характеристик исходной и скорректированной системы не изменится. Такая коррекция часто применяется для стабилизации или демпфирования систем.
в диапазоне частоты среза системы «поднять» фазовую характеристику и увеличить запасы устойчивости. При этом при малых частотах вид частотных характеристик исходной и скорректированной системы не изменится. Такая коррекция часто применяется для стабилизации или демпфирования систем.
Так как реализовать звено, осуществляющее чистое дифференцирование , достаточно сложно, то используют введение производной с инерционностью, что соответствует
При этом эффект демпфирования несколько ослабевает.
Другой вид параллельного корректирующего устройства, находящего широкое применение, — это введение интеграла и производной от сигнала прямой цепи. Пусть
тогда передаточная функция прямой цепи будет равна
а ее частотные характеристики

В системе повышается порядок астатизма на единицу и соответственно увеличивается точность. При этом путем выбора величины как следует из (9.8), отрицательный фазовый сдвиг в значительной степени можно на частоте среза скомпенсировать положительным  , что позволяет обеспечить устойчивость системы.
, что позволяет обеспечить устойчивость системы.
Задача №9.1.
Пусть в нескорректированной системе (рис. 9.1,


Требуется, чтобы статическая ошибка в системе была равной  , а скоростная ошибка при скачке по скорости управляющего сигнала
, а скоростная ошибка при скачке по скорости управляющего сигнала  и
и  была
была  . Так как , то требуемый порядок астатизма системы v должен быть не меньше единицы. Принимаем
. Так как , то требуемый порядок астатизма системы v должен быть не меньше единицы. Принимаем  = 1. Скоростная ошибка
= 1. Скоростная ошибка
откуда требуемый коэффициент передачи разомкнутой системы  . Принимаем
. Принимаем  . В прямую цепь введем последовательное корректирующее устройство с передаточной функцией
. В прямую цепь введем последовательное корректирующее устройство с передаточной функцией
тогда передаточная функция разомкнутой скорректированной системы будет равна

По критерию Гурвица (см. пример 5.3) замкнутая система с такой передаточной функцией будет устойчива при выполнении условия
которое при

не выполняется.
Итак, введение в прямую цепь последовательного корректирующего устройства с передаточной функцией
из условия обеспечения требуемой точности приводит к неустойчивости системы.
Попытаемся скорректировать систему с помощью параллельного корректирующего устройства, для чего параллельно звену с передаточной функцией  подключим звено с передаточной функцией
подключим звено с передаточной функцией
Тогда передаточная функция прямой цепи с учетом коррекции будет равна
Система становится астатической, и для обеспечения точности, как и выше, примем коэффициент передачи равным  , откуда
, откуда  . С учетом этого передаточная функция
. С учетом этого передаточная функция
Проверим скорректированную систему на устойчивость. Характеристическое уравнение замкнутой системы будет иметь вид

где

Условие устойчивости  для уравнения третьего порядка выполняется (7,8 — 1,5 = 6,3 >0).
для уравнения третьего порядка выполняется (7,8 — 1,5 = 6,3 >0).
Итак, введение параллельной коррекции приводит к тому, что скорректированная система удовлетворяет заданным показателям по точности и является устойчивой.
Встречно-параллельные корректирующие устройства
Встречно-параллельные корректирующие устройства выполняются в виде местных обратных связей. Наиболее часто обратными связями охватывают силовую часть системы управления (исполнительные элементы и усилители мощности).
Рассмотрим общие свойства таких корректирующих устройств. Для рис. 9.1, в частотная характеристика участка, охватываемого обратной связью, имеет вид
Обычно в диапазоне рабочих частот системы (в диапазоне низких частот) выполняется условие
и частотная характеристика
т. е. характеристика участка цепи, охваченного обратной
связью, определяется только видом частотной характеристики корректирующего элемента и не зависит от звена прямой цепи  . В ряде случаев это выполняется условие позволяет скомпенсировать нежелательное влияние звена на динамику системы, например, влияние малых нелинейностей или малого изменения параметров этого звена прямой цепи.
. В ряде случаев это выполняется условие позволяет скомпенсировать нежелательное влияние звена на динамику системы, например, влияние малых нелинейностей или малого изменения параметров этого звена прямой цепи.
В зависимости от вида передаточной функции  корректирующие обратные связи делятся на жесткие и гибкие. Если звено является статическим
корректирующие обратные связи делятся на жесткие и гибкие. Если звено является статическим  , то обратная связь называется жесткой. Если звено является звеном дифференцирующего типа
, то обратная связь называется жесткой. Если звено является звеном дифференцирующего типа  , то имеем гибкую обратную связь. Жесткая обратная связь действует как в переходных, так и в установившихся режимах, а гибкая — только в переходных.
, то имеем гибкую обратную связь. Жесткая обратная связь действует как в переходных, так и в установившихся режимах, а гибкая — только в переходных.
Рассмотрим несколько частных задач коррекции с помощью обратных связей.
Пусть
Тогда передаточная функция участка цепи  охваченного отрицательной обратной связью, будет иметь вид
охваченного отрицательной обратной связью, будет иметь вид

Итак, структура звена не изменилась, оно осталось апериодическим, но произошло уменьшение коэффициента передачи и эквивалентной постоянной времени  . Отсюда следует, что охват в прямой цепи наиболее инерционного звена позволяет уменьшить инерционность всей цепи, что благоприятно сказывается на показателях качества системы (быстродействии, устойчивости). Уменьшение коэффициента передачи можно компенсировать введением дополнительного усилительного устройства.
. Отсюда следует, что охват в прямой цепи наиболее инерционного звена позволяет уменьшить инерционность всей цепи, что благоприятно сказывается на показателях качества системы (быстродействии, устойчивости). Уменьшение коэффициента передачи можно компенсировать введением дополнительного усилительного устройства.
Пусть

тогда
В этом случае меняется тип звена. При

и можно записать приближенное выражение для передаточной функции

Итак, получили эквивалентное форсирующее звено, влияние которого аналогично влиянию введения производной при параллельной коррекции.
Рассмотрим изменение свойств охваченного участка прямой цепи при охвате его гибкой обратной связью. Пусть
В этом случае передаточная функция участка цепи с обратной связью
где

Итак, при сохранении интегрирующих свойств эквивалентная передаточная функция обладает форсирующими свойствами из-за сомножителя  .
.
Если сделать величину  достаточно большой, то малыми постоянными времени
достаточно большой, то малыми постоянными времени  и
и  можно пренебречь. При этом получим
можно пренебречь. При этом получим

В этом случае получаем в прямой цепи изодромное звено.
Задача №9.2.
Рассмотрим нескорректированную систему; как и в примере 9.1, передаточная функция системы без коррекции будет иметь вид

Требуется, чтобы статическая ошибка в системе при управляющем входном сигнале

не превосходила величины 0,1, т. е.  , а время регулирования
, а время регулирования  .
.
При  статическая ошибка в системе будет
статическая ошибка в системе будет  , т. е. будет удовлетворять заданным требованиям.
, т. е. будет удовлетворять заданным требованиям.
Оценим в системе время регулирования, базируясь на корневых оценках качества. Характеристическое уравнение замкнутой системы имеет вид:

Это уравнение имеет два комплексных корня, действительная часть которых  , откуда следует, что система устойчива. Степень устойчивости системы
, откуда следует, что система устойчива. Степень устойчивости системы  и в соответствии с (7.4)
и в соответствии с (7.4)  . Таким образом, время регулирования в системе не удовлетворяет заданному. Для уменьшения времени регулирования следует уменьшить максимальную постоянную времени. Для этого охватим последнее звено с передаточной функцией
. Таким образом, время регулирования в системе не удовлетворяет заданному. Для уменьшения времени регулирования следует уменьшить максимальную постоянную времени. Для этого охватим последнее звено с передаточной функцией  жесткой отрицательной обратной связью с передаточной функцией
жесткой отрицательной обратной связью с передаточной функцией  ,
,  . Тогда передаточная функция скорректированного участка цепи будет равна
. Тогда передаточная функция скорректированного участка цепи будет равна
а передаточная функция разомкнутой скорректированной системы будет равна
Для компенсации уменьшения общего коэффициента усиления и обеспечения заданной точности в прямую цепь введем дополнительное усилительное звено с коэффициентом усиления, равным 7 (фактически это последовательная коррекция). В этом случае окончательно передаточная функция скорректированной системы
характеристическое уравнение замкнутой системы

имеет два комплексных корня с действительной частью  .
.
Таким образом,  , время регулирования
, время регулирования  и после коррекции система удовлетворяет заданным показателям качества.
и после коррекции система удовлетворяет заданным показателям качества.
Корректирующие устройства по внешнему воздействию
При изменении передаточной функции прямой цепи с помощью последовательных, параллельных или встречно-параллельных корректирующих устройств для достижения заданных показателей качества неизменным остается главный принцип построения системы — принцип обратной связи (управление по отклонению). Учет внешнего воздействия при коррекции, в частности применение принципа компенсации (управление по возмущению) совместно с управлением по отклонению, позволяет расширить возможности коррекции системы.
Системы, использующие как управление по отклонению, так и по возмущению, относятся к классу комбинированных систем управления (см. под-разд. 1.1). Наиболее часто комбинированное управление применяется для повышения точности системы управления и уменьшения установившейся ошибки. При определенных условиях с помощью комбинированного управления можно свести установившуюся ошибку к нулю при любой форме внешнего воздействия. Такое свойство называется инвариантностью системы по отношению к внешнему воздействию.
На рис. 9.5, а представлена структура комбинированной системы с корректирующим устройством по управляющему воздействию, а на рис. 9.5, б -с корректирующим устройством по возмущению, где в первом случае передаточная функция корректирующего устройства обозначена через  , а во втором — через
, а во втором — через  .
.
Передаточная функция замкнутой системы без коррекции, связывающая выход  со входом
со входом  , для обоих случаев имеет вид
, для обоих случаев имеет вид
Найдем связь изображений выходного сигнала с внешними воздействиями.
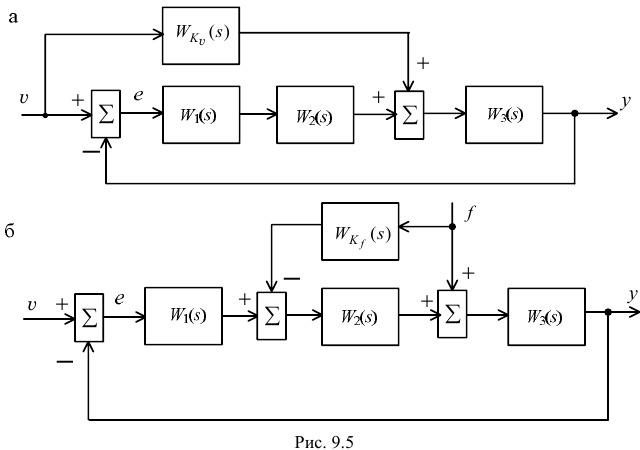
Для структуры (см. рис. 9.5, а) имеем

а для структуры (см. рис. 9.5, б) имеем
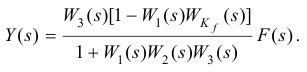
Задача любой системы автоматического управления — как можно более точно воспроизвести управляющий (полезный) сигнал  и максимально ослабить влияние возмущения на выходной сигнал. С этой точки зрения желательно, чтобы в (9.10) передаточная функция, связывающая
и максимально ослабить влияние возмущения на выходной сигнал. С этой точки зрения желательно, чтобы в (9.10) передаточная функция, связывающая  и
и  , была равна единице (тогда
, была равна единице (тогда  ), а передаточная функция в (9.11), связывающая
), а передаточная функция в (9.11), связывающая  и
и  , была равна нулю (тогда
, была равна нулю (тогда  не влияет на
не влияет на  ). Выполнением этих условий будут соответственно следующие соотношения:
). Выполнением этих условий будут соответственно следующие соотношения:
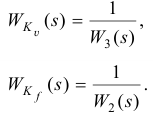
Условия (9.12), (9.13) соответствуют так называемой полной инвариантности системы. При выполнении (9.12) передаточная функция, связывающая ошибку  и входной сигнал
и входной сигнал  , как это нетрудно проверить, будет равна нулю, т. е. ошибка в системе не зависит (инвариантна) от управляющего сигнала и всегда равна нулю. При выполнении (9.13) выход системы у не зависит (инвариантен) от возмущения
, как это нетрудно проверить, будет равна нулю, т. е. ошибка в системе не зависит (инвариантна) от управляющего сигнала и всегда равна нулю. При выполнении (9.13) выход системы у не зависит (инвариантен) от возмущения  .
.
Отметим, что условия (9.12), (9.13) гарантируют инвариантность соответствующих координат с точностью до свободной составляющей, т. е. процессы, вызванные начальными отклонениями соответствующих координат и их производных, компенсироваться не будут.
Сравнивая (9.9) — (9.11), приходим к выводу, что характеристическое уравнение нескорректированной системы (9.9) и скорректированных систем (9.10), (9.11) одно и то же:

т. е. коррекция по внешнему воздействию не изменяет характеристического уравнения системы и соответственно свойств устойчивости (запасов устойчивости), а также ряда других показателей качества переходных процессов.
В силу этого контур управления по отклонению, как правило, используют для придания определенных динамических свойств системе, а контуры коррекции по внешним воздействиям — для обеспечения точности.
Точное выполнение условий инвариантности (9.12), (9.13) практически невозможно из условий физической реализуемости. Действительно, если в (9.12), (9.13) передаточные функции 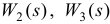 соответствуют физически реализуемым звеньям, т. е. степени полиномов относительно s их числителя меньше степеней знаменателя, то передаточные функции
соответствуют физически реализуемым звеньям, т. е. степени полиномов относительно s их числителя меньше степеней знаменателя, то передаточные функции  и
и  , обратные им, будут соответствовать физически нереализуемым звеньям.
, обратные им, будут соответствовать физически нереализуемым звеньям.
Поэтому (9.12), (9.13) выполняются на практике с некоторой погрешностью, в силу чего и инвариантность систем будет не полной, но ошибки в системе с помощью корректирующих устройств по внешнему воздействию могут быть значительно уменьшены.
Синтез САУ на основе логарифмических частотных характеристик
Общий порядок синтеза системы включает следующие этапы:
- По виду передаточной функции исходной системы строится ЛAX исходной системы . При этом исходная система должна иметь функционально необходимые элементы и должна быть минимально-фазовой.
- На основании требований к САУ строится желаемая ЛAX .
- Путем сравнения характеристик и определяется (если коррекция последовательная). Эту коррекцию также можно пересчитать к параллельной или встречно-параллельной.
- По виду LK(со) определяется структурная схема и параметры коррекции.
- Производится моделирование системы на ЦВМ (например в среде Matlab), уточняются параметры САУ.
- Производится реализация коррекции с помощью регуляторов или программно.
 строится ЛAX исходной системы
строится ЛAX исходной системы  (если коррекция последовательная). Эту коррекцию также можно пересчитать к параллельной или встречно-параллельной.
(если коррекция последовательная). Эту коррекцию также можно пересчитать к параллельной или встречно-параллельной.Построение ЛAX исходной системы не вызывает затруднений. Рассмотрим подробнее построение желаемой ЛAX. Учет требований точности САУ:
а) Пусть даны рабочая частота  и амплитуда
и амплитуда  задающего воздействия
задающего воздействия  , а также допустимая ошибка
, а также допустимая ошибка  .
.
Так как для низких частот
то при
Тогда
б) Пусть даны

Тогда

в) Пусть для астатической САУ даны

Тогда

и при
Используя выражения (9.15) — (9.17), строится низкочастотная область  (рис. 9.6).
(рис. 9.6).
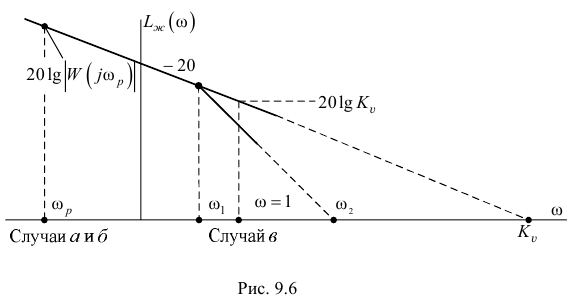
Значение частоты  называют добротностью САУ по скорости. Первый излом на частоте
называют добротностью САУ по скорости. Первый излом на частоте  при однократном изломе (при изменении наклона на -20
при однократном изломе (при изменении наклона на -20  ) определяется как
) определяется как  , где
, где
называют добротностью системы по ускорению; при двукратном изломе
Учет требований качества переходного процесса:  колебательности, запасов устойчивости. Эти показатели учитываются при формировании среднечастотной области . Здесь можно воспользоваться графиками (рис. 9.7, а, б).
колебательности, запасов устойчивости. Эти показатели учитываются при формировании среднечастотной области . Здесь можно воспользоваться графиками (рис. 9.7, а, б).
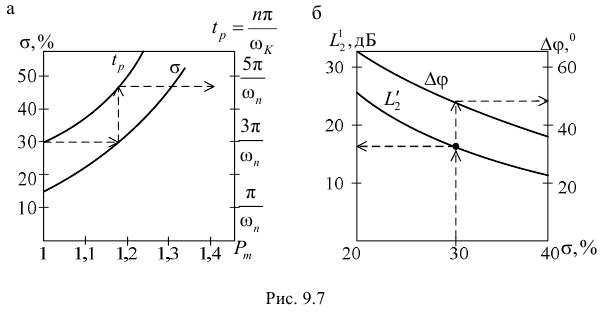
По графику (см. рис. 9.7, а) для заданных значений  и
и  находят
находят  и затем из соотношения
и затем из соотношения  частоту среза
частоту среза  .
.
Например: (как показано на рис. 9.7, а) для  , откуда для заданного значения
, откуда для заданного значения  (допустим, что оно равно 0,1 с), определяются значения
(допустим, что оно равно 0,1 с), определяются значения

По графику (см. рис. 9.7, б), где установлены зависимости  от
от  и ординат
и ординат  и
и  среднечастотной части от , находят для заданного значения необходимые
среднечастотной части от , находят для заданного значения необходимые  .
.
Сопряжение средиечастотного участка с низкочастотным и высокочастотным (рис. 9.8) должно быть таким, чтобы была проще коррекция и изломы, по возможности, были однократными.
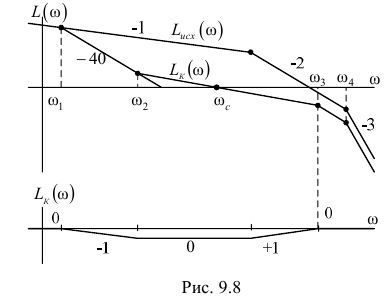
Для облегчения процедуры синтеза коррекции вводятся типовые передаточные функции исходной системы и соответствующие им передаточные функции желаемой системы:
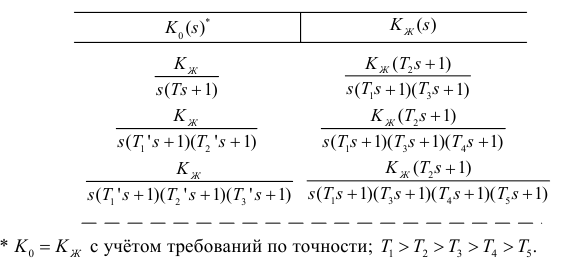
Остановимся на коррекции. Вычитая из ординаты  , получим
, получим  Вид ЛАХ коррекции соответствует случаю коррекции с опережением и отставанием по фазе.
Вид ЛАХ коррекции соответствует случаю коррекции с опережением и отставанием по фазе.
Передаточная функция коррекции будет с учётом обеспечения показателей точности иметь вид
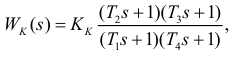
где

причем  — коэффициент передачи исходной системы. Так как реализовать дифференцирующие звенья сложно, переходят к схеме коррекции с использованием интеграторов. Для этого необходимо представить (9.18) в виде
— коэффициент передачи исходной системы. Так как реализовать дифференцирующие звенья сложно, переходят к схеме коррекции с использованием интеграторов. Для этого необходимо представить (9.18) в виде

Схема реализации коррекции представлена на рис. 9.9.
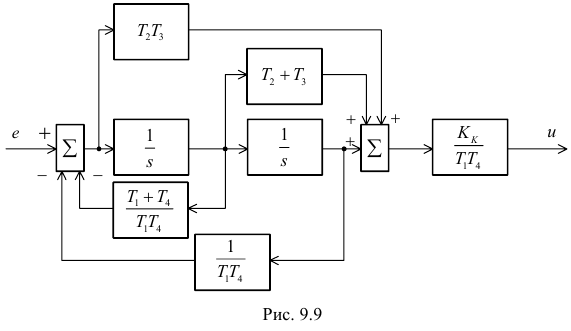
Модальный метод синтеза (метод размещения полюсов)
Рассмотрим САУ с одним входом и одним выходом, будем считать  Пусть модель объекта имеет вид
Пусть модель объекта имеет вид
При этом методе синтеза закон управления выражается формулой

где  -вектор коэффициентов
-вектор коэффициентов  .
.
Структура замкнутой САУ приведена на рис. 9.10.
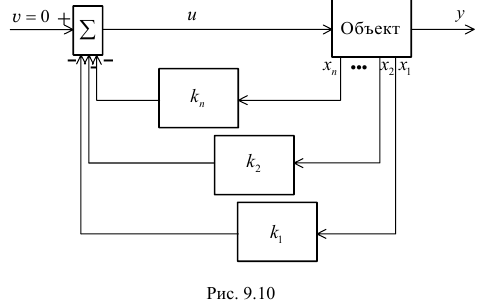
Так как , то назначение САУ поддерживать значение  . Такую САУ называют регулятором состояния.
. Такую САУ называют регулятором состояния.
Рассмотрим пример спутника (рис. 9.11) с передаточной функцией  [6].
[6].
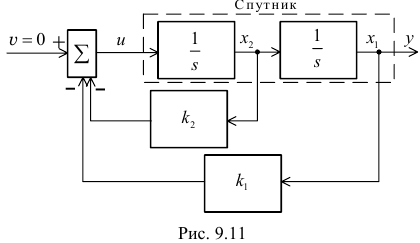
Модель объекта (спутника) будет иметь вид
Для замкнутой САУ, где  имеем
имеем

где  — матрица коэффициентов замкнутой САУ.
— матрица коэффициентов замкнутой САУ.
Характеристическое уравнение замкнутой САУ имеет вид

Пусть корни его будут  и
и  тогда характеристическое уравнение желаемой замкнутой системы имеет вид
тогда характеристическое уравнение желаемой замкнутой системы имеет вид

Синтез системы заключается в выборе  и
и  в (9.22), которые бы соответствовали коэффициентам уравнения (9.23), т. е. :
в (9.22), которые бы соответствовали коэффициентам уравнения (9.23), т. е. :
Рассмотрим общий принцип синтеза САУ. Пусть

Подставляя (9.26) в (9.25), получим

Характеристическое уравнение замкнутой САУ имеет вид

Если корни

то желаемое характеристическое уравнение замкнутой САУ будет иметь вид

Приравнивая (9.28) и (9.29), имеем

В этом уравнении  неизвестных
неизвестных  но они могут быть найдены путем приравнивания коэффициентов при
но они могут быть найдены путем приравнивания коэффициентов при  в одинаковых степенях. Пусть передаточная функция объекта будет иметь вид
в одинаковых степенях. Пусть передаточная функция объекта будет иметь вид
Уравнения состояния при

имеют вид
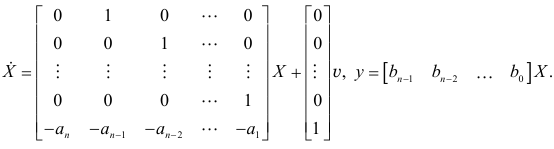
Матрица  является фробениусовой, а уравнение объекта соответствует нормальной форме.
является фробениусовой, а уравнение объекта соответствует нормальной форме.
При законе модального уравнения  для замкнутой САУ в матрице
для замкнутой САУ в матрице
Матрица
Характеристическое уравнение замкнутой САУ имеет вид

Желаемое характеристическое уравнение замкнутой САУ будет

Из двух последних уравнений следует:
Последняя система представляет собой общее решение задачи синтеза путём размещения полюсов для САУ с одним входом и одним выходом, но для этого исходная модель САУ должна быть в нормальной форме (матрица  -фробениусова).
-фробениусова).
Аккерман [6] предложил формулу, которая позволяет перейти от произвольной формы уравнений состояния к нормальной, затем найти  а потом перейти к исходной структуре.
а потом перейти к исходной структуре.
Формула Аккермана имеет вид

где  — матричный полином, образованный путём использования коэффициентов желаемого характеристического уравнения
— матричный полином, образованный путём использования коэффициентов желаемого характеристического уравнения

Последние выражения (при  ) рассчитываются на компьютере.
) рассчитываются на компьютере.
Задача №9.3.
Для спутника
характеристическое уравнение

Используем формулу Аккермана. Определим
затем
Образуем матричный полином

По формуле Аккермана


Остановимся на вопросе формирования полюсов передаточной функции замкнутой САУ, исходя из заданных показателей качества на основе корневых оценок.
Определим границу расположения желаемых полюсов (корней) САУ. Исходя из заданного времени переходного процесса  , в силу (7.4) находим
, в силу (7.4) находим  , если ближайший к мнимой оси корень вещественный и
, если ближайший к мнимой оси корень вещественный и  .
.
Угол сектора комплексных корней связан с перерегулированием в силу (7.6) соотношением
если ближайшая к мнимой оси — пара комплексных сопряжённых корней и  .
.
Из соотношения
следует
Задача №9.4.
Рассмотрим оба случая для САУ из предыдущего примера.
Если  (ближайший корень — вещественный) и
(ближайший корень — вещественный) и  .
.
Возьмём оба корня вещественных:
Тогда

Пусть

Тогда
При  значение
значение


Примечание. При определении полюсов не следует чрезмерно увеличивать  так как при этом увеличиваются значения
так как при этом увеличиваются значения  , а для повышения реакции инерционных объектов надо на их вход подавать большие сигналы, что может привести к насыщению элементов и сделать САУ нелинейной.
, а для повышения реакции инерционных объектов надо на их вход подавать большие сигналы, что может привести к насыщению элементов и сделать САУ нелинейной.
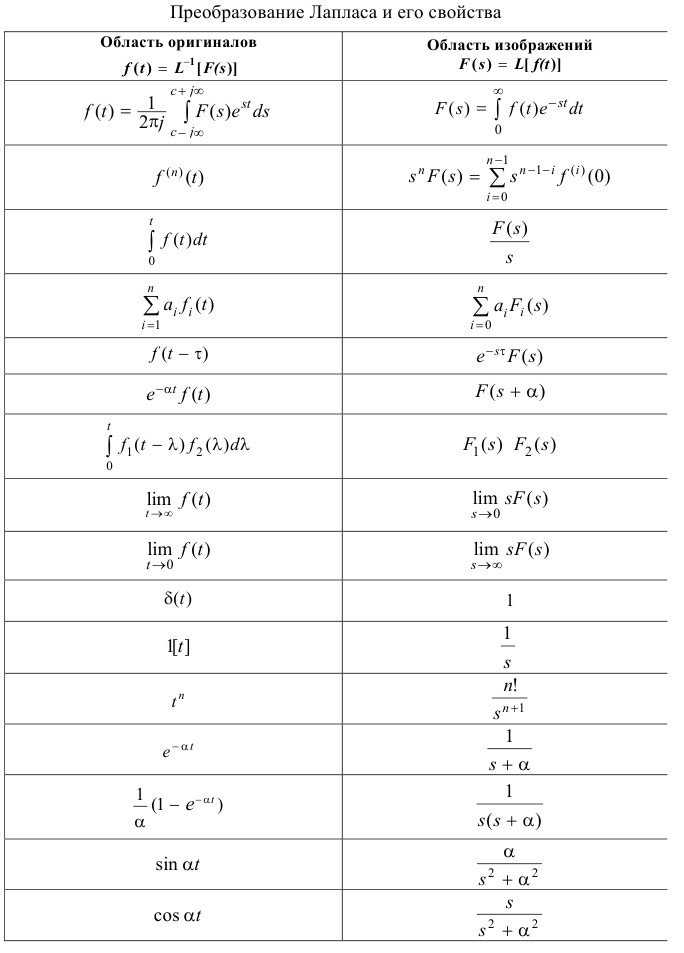

Построение асимптотической лачх по уравнению онлайн
Предлагаю ознакомиться с программой, написанной мною для построения асимптотических частотных логарифмических характеристик. Данные характеристики используются в курсовой работе по ТАУ. Для построения графиков нужно задать постоянные времени для звеньев исходной системы и ПКУ, значения можно вводить в любом порядке. Скачать программу и исходники
Например, есть система:
1) Вводим значения
Значения специально вводил не последовательно – это не важно, главное ввести в свои столбцы.
2) Нажимаем “Показать график”. Получаем графики
Принцип работы ясен из комментариев в исходном тексте. Небольшого пояснения требует только формула расчета усиления.
Рассмотрим сначала отдельно формулы для инерциальных, форсирующих и интегрирующих звеньев системы.
I ) Инерциальные звенья. . Соответственно частоты сопряжения будут . При этом решим, что . Коэффициент усиления L в децибелах на разных частотах системы будет
Ни одно звено не работает.
Включилось первое звено и стало давать коэффициент усиления
Стали работать 2 звена и давать коэффициент усиления
3) Продолжая дальше, получим
II ) Аналогично для форсирующих звеньев и коэффициент усиления будет
III ) И наконец для интегрирующих звеньев для любого
где n – число интегрирующих звеньев.
Все звенья включены последовательно, коэффициент усиления системы состоит из произведений коэффициентов звеньев, но это в линейном масштабе, а в логарифмическом, соответственно из суммы. Получается, что три формулы можно объединить в одну и задав в начале в качестве n число интегрирующих звеньев, для инерциальных звеньев n увеличивать, а для форсирующих уменьшать, что и выполнено в данной программе.
Как построить лачх по передаточной функции
Методика построения лачх
1. Определяются сопрягающие частоты:
 . (4.1)
. (4.1)
Полученные значения откладываются на оси частот в логарифмическом масштабе ( ,
, , …,
, …, ).
).
2. На начальном интервале частот  наклон ЛАЧХ зависит от вида системы:
наклон ЛАЧХ зависит от вида системы:
если система статическая, то в интервале частот  откладывается горизонтальная прямая проходящая на расстоянии 20lgk дБ от логарифмической оси частот;
откладывается горизонтальная прямая проходящая на расстоянии 20lgk дБ от логарифмической оси частот;
если система астатическая (полином в знаменателе передаточной функции W(p) имеет нулевые корни), то в интервале частот  проводится прямая с отрицательным наклоном –20v дБ/дек, где v – степень астатизма системы (число нулевых корней знаменателя передаточной функции), через точку с координатами (lg1, 20lgk), т.е. (0, 20lgk);
проводится прямая с отрицательным наклоном –20v дБ/дек, где v – степень астатизма системы (число нулевых корней знаменателя передаточной функции), через точку с координатами (lg1, 20lgk), т.е. (0, 20lgk);
если система с нулевыми нулями (полином в числителе передаточной функции W(p) имеет нулевые корни), то в интервале частот  проводится прямая с положительным наклоном +20λ деб/дек, где λ – число нулевых корней числителя передаточной функции, через точку с координатами (
проводится прямая с положительным наклоном +20λ деб/дек, где λ – число нулевых корней числителя передаточной функции, через точку с координатами ( , 0).
, 0).
3. После каждой сопрягающей частоты  , …,
, …,  наклон ЛАЧХ L(ω) меняется в зависимости от того, какому звену принадлежит сопрягающая частота. В итоге получается асимптотическая ЛАЧХ в виде ломаной прямой.
наклон ЛАЧХ L(ω) меняется в зависимости от того, какому звену принадлежит сопрягающая частота. В итоге получается асимптотическая ЛАЧХ в виде ломаной прямой.
4. При необходимости более точного построения точки ЛАЧХ в окрестностях точек излома корректируются значения L(ω) с использованием специальных таблиц поправок, приведённых в 5.
Примечание: ЛФЧХ строится так же, как и ЧХ, но при этом используется логарифмический масштаб частот.
Пример построения лачх статической сар
Дана передаточная функция статической системы:
 , (4.2)
, (4.2)
Построить асимптотическую ЛАЧХ для статической системы.
Для построения ЛАЧХ воспользуемся формой представления комплексного числа в соответствии с формулой Эйлера:
 , (4.3)
, (4.3)
где  ;
;  .
.
Найдём частотную передаточную функцию:
 (4.4)
(4.4)
или с учётом (4.3)
 . (4.5)
. (4.5)
Тогда модуль частотной передаточной функции
 . (4.6)
. (4.6)
Отсюда имеем, что
 . (4.7)
. (4.7)
Определим сопрягающие частоты:
 ,
,  ;
;
 ,
,  ;
;
 ,
,  .
.
Отложим значения частот на оси частот в логарифмическом масштабе, как показано на рисунке 4.1.

Рисунок 4.1 – Пример ЛАЧХ статической САУ
Так как система статическая, то в интервале частот  проводится горизонтальная прямая на расстоянии 20lgk дБ от логарифмической оси частот
проводится горизонтальная прямая на расстоянии 20lgk дБ от логарифмической оси частот
 дБ (4.8)
дБ (4.8)
до пересечения с ординатой, проходящей через частоту ω2 (точка А).
Так как частота ω2 принадлежит звену с отрицательным наклоном, то из точки А проводится прямая с наклоном –20дБ/дек до пересечения с ординатой через частоту ω1 (точка В). Наклон –20дБ/дек получается при соединении точек с координатами (0, 20lgk) и (1,0) на рисунке 4.1 линия 1.
Частота ω1 принадлежит звену с положительным наклоном 20дБ/дек, поэтому в интервале частот от ω1 до ω3 получим горизонтальную прямую (отрезок ВС).
Частота ω3 принадлежит звену с отрицательным наклоном –20дБ/дек, поэтому L(ω) дальше пойдёт под наклоном 20дБ/дек из точки С.
Пример построения лачх астатической сар
Дана передаточная функция астатической системы:
 , (4.9)
, (4.9)
Построить ЛАЧХ для астатической системы первого порядка.
Примечание: Формально степень астатизма САР определяется степенью переменной р в знаменателе передаточной функции. Так как в примере р в первой степени, значит рассматриваемая САР имеет астатизм первого порядка.
Аналогично предыдущему примеру найдём  и
и  .
.
 . (4.10)
. (4.10)
 . (4.11)
. (4.11)
 . (4.12)
. (4.12)
Определим сопрягающие частоты:
 ,
,  ;
;
 ,
,  .
.
Отложим их на оси частот в логарифмическом масштабе, как показано на рисунке 4.2.

Рисунок 4.2 – Пример ЛАЧХ для астатической САР
На участке частот  проводим прямую с наклоном –20дБ/дек через точку с координатами (0; 20lgk). Масштаб наклона – 20деб/дек показан линией 1, так как 20lgk=20lgω, а значит lgω= lgk= lg10=1.
проводим прямую с наклоном –20дБ/дек через точку с координатами (0; 20lgk). Масштаб наклона – 20деб/дек показан линией 1, так как 20lgk=20lgω, а значит lgω= lgk= lg10=1.
На участке частот (ω1;ω2) проводится прямая с наклоном –40 деб/дек, так как звено с частотой имеет отрицательный наклон –20 деб/дек. Масштаб наклона – 40деб/дек показан линией 2.
На участке частот (ω2;∞) L(ω) имеет наклон –20деб/дек, так как звено с частотой ω2 имеет положительный наклон +20деб/дек.
ЗАДАНИЕ
На курсовое проектирование по дисциплине
«Основы теории управления»
Студенту Макееву Александру Александровичу , группа 434
(фамилия, имя, отчество)
Направление подготовки 230100 – Информатика и вычислительная техника
Специальность 230104 – Системы автоматизированного проектирования
ТемаРазработка программы для синтеза САУ методом ЛАЧХ
Исходные данные к проекту:
Список используемых источников:
1 Теория автоматического управления : учеб. для вузов. В 2 ч. – Ч.1: Теория линейных систем автоматического управления / Н. А. Бабаков, А. А. Воронов [ и др. ] ; под ред. А. А. Воронова. – М. : Высш. шк. , 1986. – 367 с.
2 Макарова, Л. Ф. Основы теории управления: конспект лекций / Л. Ф. Макарова. – СПб.: СПбГТИ(ТУ). – 2015.
3 Портал Python 2.7.4 Documentation [Электронный ресурс]: Электронные данные – Режим доступа: https://docs.python.org
4 Портал Welome to Kivy [Электронный ресурс]: Электронные данные – Режим доступа: http://kivy.org/docs
5 Портал Stack Overflow [Электронный ресурс]: Электронные данные – Режим доступа: http://stackoverflow.com
Требования к аппаратному программному обеспечению
Intel Core i5 3230-M 2.6 GHz, ОЗУ 6 Гб.
ОС Linux Ubuntu Mate 14.04; текстовой редактор – Sublime Text 3, средства оформления документации — Microsoft Office Word 2007.
Дата выдачи задания 17.09.2015
Дата представления курсового проекта к защите25.12.2015
Руководитель Л.Ф. Макарова
(подпись, дата) (инициалы, фамилия)
Зав. кафедрой Т.Б. Чистякова
(подпись, дата) (инициалы, фамилия)
Задание принял(а) к выполнению студент(ка)
Цель и задачи курсового проекта 4
1 Аналитическая часть 6
1.1 Построение ЛАЧХ_ 6
1.2 Построение желаемой ЛАЧХ_ 7
1.3 Построение ЛФЧХ_ 8
1.4 Анализ устойчивости_ 8
2 Практическая часть 10
2.1 Анализ передаточной функции заданного соединения звеньев_ 10
2.2 Построение ЛАЧХ_ 11
2.3 Построение ЛФЧХ_ 12
2.4 Блок-схема алгоритма_ 14
2.5 Основные дисплейные фрагменты_ 15
Список используемых источников 18
ПРИЛОЖЕНИЕ А_ 19
ПРИЛОЖЕНИЕ Б_ 20
ПРИЛОЖЕНИЕ В_ 25
Цель и задачи курсового проекта
Цель курсового проекта:
Для системы с заданной передаточной функцией разработать программу для построения асимптотической логарифмической амплитудно-частотной характеристики (ЛАЧХ) и логарифмической фазо-частотной характеристики (ЛФЧХ).
В процессе проектирования необходимо решить следующие задачи:
— провести анализ передаточных функций и логарифмических частотных характеристик типовых динамических звеньев;
— разработать алгоритм и программу построения ЛАЧХ и ЛФЧХ соединения типовых звеньев;
— разработать подпрограмму графического определения запасов устойчивости по модулю и фазе с помощью ЛАЧХ и ЛФЧХ;
— провести тестирование разработанной программы, состоящее в изменении параметров заданной передаточной функции с целью увеличения запасов устойчивости или улучшения качества функционирования системы в смысле повышения ее быстродействия.
Введение
В практической автоматике при расчетах АСР удобно использовать частотные характеристики, построенные в логарифмической системе координат (ЛЧХ). Применение логарифмического масштаба позволяет наглядно отображать частотные характеристики в большом диапазоне частот, представлять ЧХ отрезками ломаных линий и определять характеристики сложных систем простым суммированием или вычитанием ЛЧХ, входящих в эти системы элементов.
ЛЧХ являются исчерпывающими характеристиками системы, по которым можно восстановить ее ПФ и определить параметры.
Главное достоинство ЛАЧХ – возможность построения их во многих случаях практически без вычислений. Это проявляется в тех случаях, когда  представляется в виде произведения сомножителей. Тогда результирующая ЛАЧХ находится суммированием ординат ЛАЧХ, соответствующих отдельным сомножителям.
представляется в виде произведения сомножителей. Тогда результирующая ЛАЧХ находится суммированием ординат ЛАЧХ, соответствующих отдельным сомножителям.
Аналитическая часть
В теории автоматического управления широко используются логарифмические амплитудно-частотные и фазо-частотные характеристики (ЛАЧХ и ЛФЧХ). Они получаются путем логарифмирования коэффициента передаточной функции (КПФ):

ЛАЧХ получают из первого слагаемого, которое умножается на 20:

Величина откладывается по оси ординат в децибелах или белах (1 Б = 10 дБ).
Бел – единица измерения отношения мощности двух сигналов. Если мощности двух сигналов отличаются в 10 раз, то это отличие соответствует 1 Б (  ). Два сигнала
). Два сигнала  отличаются на 1 дБ, если
отличаются на 1 дБ, если  , что соответствует
, что соответствует  .
.
По оси абсцисс откладывается частота  в логарифмическом масштабе, которая измеряется в декадах.
в логарифмическом масштабе, которая измеряется в декадах.
Декада – интервал частот, заключенный между произвольным значением и его десятикратным значением. Отрезок, соответствующий одной декаде равен 1. Логарифмическая шкала не имеет нуля и не может пересекаться вертикальной осью в любом месте.
ЛФЧХ, получаемая из второго слагаемого, отличается от ЛАЧХ только масштабом по оси абсцисс. Величина  откладывается по оси ординат в градусах или радианах (для элементарных звеньев она не выходит за пределы
откладывается по оси ординат в градусах или радианах (для элементарных звеньев она не выходит за пределы  ). Таким образом, при построении ЛФЧХ логарифмический масштаб применяется только для оси абсцисс.
). Таким образом, при построении ЛФЧХ логарифмический масштаб применяется только для оси абсцисс.
Построение ЛАЧХ
При построении ЛАЧХ по оси ординат наносится равномерный масштаб, желательно кратный 20 дБ. Начало координат помещают в точке  = 1. Ось абсцисс должна проходить через точку 0 дБ, что соответствует значению модуля
= 1. Ось абсцисс должна проходить через точку 0 дБ, что соответствует значению модуля  . Точка
. Точка  лежит на оси частот слева в бесконечности, т.к.
лежит на оси частот слева в бесконечности, т.к.  . В зависимости от интересующего диапазона частот ось ординат можно проводить и через другую точку так, чтобы можно было показать весь ход ЛАЧХ.
. В зависимости от интересующего диапазона частот ось ординат можно проводить и через другую точку так, чтобы можно было показать весь ход ЛАЧХ.
Для каждой из сопрягающих частот определяется наклон характеристики по сравнению с тем наклоном, который эта характеристика имела до сопрягающей частоты в соответствии с видом звена, представленных в таблице 1.
Таблица 1 – Наклоны ЛАЧХ типовых динамических звеньев
| Вид звена | Передаточная функция | Наклон (дБ/дек) |
| Усилительное | ||
| Апериодическое | -20 | |
| Колебательное | -40 | |
| Инерционное II-го порядка | -40 | |
| Дифференцирующее | +20 | |
| Форсирующее I-го порядка | +20 | |
| Форсирующее II-го порядка | +40 |
Построение желаемой ЛАЧХ
Желаемой называют асимптотическую ЛАЧХ разомкнутой системы, имеющей желаемые или требуемые статические и динамические свойства. Желаемая ЛАЧХ состоит из 3-х основных асимптот:
-низкочастотной ( )
-среднечастотной ( )
-высокочастотной ( )
Низкочастотная асимптота ЛАЧХ разомкнутой системы определяет статические свойства САУ (точность) и ее наклон зависит от порядка астатизма системы : при наклон ЛАХ равен -20 дБ/дек, при наклон ЛАХ равен -40 дБ/дек. Если передаточная функция имеет передаточный коэффициента и порядок астатизма , удовлетворяющие требованиям, то низкочастотной асимптотой желаемой ЛАЧХ является низкочастотная асимптота ЛАЧХ неизменяемой части системы. Если наклон низкочастотной асимптоты равен 0 или -20 дБ/дек, то наклон сопрягающей асимптоты выбирается равным -40 или -60 дБ/дек.
Среднечастотная асимптота ЛАЧХ разомкнутой системы и ее сопряжение с низкочастотной определяет динамические свойства системы (устойчивость и показатели переходной характеристики). Построение начинают с выбора частоты среза , которая определяет зависимость перерегулирования и времени регулирования от максимума ВЧХ замкнутой системы, причем дано в виде функции . Среднечастотная асимптота проводится через точку с наклоном -20 дБ/дек влево и вправо от до получения определенных запасов устойчивости и допустимое перерегулирование. Протяженность устанавливается исходя из необходимого запаса устойчивости. Из этих соображений выбирают ее сопряжение с низкочастотной асимптотой. Кроме того, сопрягающую асимптоту следует выбрать так, чтобы характеристика возможно меньше отличалась от ) для того, чтобы при вычитании получалось в реализации наиболее простое КУ.
Высокочастотная асимптота мало влияет на свойства системы, поэтому ее следует выбирать так, чтобы корректирующее устройство (КУ) было возможно более простым. Это достигается при совмещении высокочастотных асимптота характеристик и . Если совмещение не удается, то высокочастотная асимптота должна иметь тот же наклон, что и высокочастотная асимптота .
Построение ЛФЧХ
Довольно часто ЛАЧХ и ЛФЧХ строятся на одном графике, чтобы давать полное представление о свойствах системы.
Для построения ЛФЧХ используется также ось частот (ось абсцисс). По оси ординат откладывается фаза в градусах (или радианах) в линейном масштабе. Положительный сдвиг по фазе откладывается по оси ординат вверх, а отрицательный – вниз.
Анализ устойчивости
Оценку устойчивости по критерию Найквиста удобнее производить по ЛЧХ разомкнутой системы. Применение метода ЛЧХ дает возможность увидеть влияние того или иного параметра системы на ее устойчивость и переходный процесс, а также позволяет сравнительно определить характеристику КУ, обеспечивающего требуемые показатели качества системы.
САУ, устойчивая в разомкнутом состоянии, будет устойчива в замкнутом состоянии, если ордината ЛФЧХ на частоте среза системы по абсолютной величине меньше, чем , т.е. если .
Для того чтобы замкнутая система была устойчива необходимо и достаточно, чтобы на всех частотах, где ЛАЧХ разомкнутой системы положительная ( ), фазовый сдвиг не достигал или достигал его четное число раз.
Замкнутая система будет находиться на границе устойчивости, если на той же частоте среза , где ЛАЧХ разомкнутой системы обращается в 0 ( ), значение ФЧХ равно . Это соответствует состоянию разомкнутой системы, когда ее АФЧХ проходит через точку , т.е. когда модуль . Так как , то система будет находиться на граице устойчивости, если на частоте .
Запас устойчивости по модулю показывает, во сколько раз можно увеличить коэффициента усиления системы без потери устойчивости. Определяется на частоте, где ФЧХ дотигает значения .
Запас устойчивости по фазе определяется на частоте , где и характеризует отклонение от , т.е. .
Эмпирическим путем установлено, что для нормальной работы многих систем управления необходимо обеспечивать следующие запасы устойчивости: , .
Для того, чтобы замкнутая система была устойчива необходимо и достаточно, чтобы частота, при которой ЛФЧХ пересекает линию , была больше частоты среза.
Практическая часть
Рассмотрим пример системы с передаточной функцией (ПФ):
Обычно объект управления представляет собой последовательную цепочку типовых звеньев, поэтому L0(со) можно получить, суммируя отдельные ЛЛЧХ, причем в этом случае удобнее строить асимптотические характеристики звеньев. Подобное суммирование позволяет предложить следующую процедуру построения L0(co).
Пример 6.5. Построить асимптотическую ЛАЧХ объекта, передаточная функция которого имеет вид
где коэффициент усиления ku = 10, а постоянные времени Г, = 10 с, Т2 = 1 с. Решение
Используем предложенную процедуру для построения ЛАЧХ объекта. Предварительно определим характерные точки:
и отметим их па осях координат (рис. 6.10).
Рис. 6.10. Асимптотическая ЛАЧХ объекта для примера 6.5
Построение ЛАЧХ начинается из области низких частот, которая расположена левее первой частоты сопряжения. Низкочастотная асимптота имеет наклон -20 дБ/дек., так как передаточная функция объекта содержит интегрирующее звено. Проводится она до частоты lgco, так, чтобы ее продолжение пересекало ось ординат в точке 20lg&0.
Па частоте lgco, происходит излом характеристики на -20 дБ/дек., что соответствует апериодическому звену в составе W0(p). До следующей частоты сопряжения (lgco2) наклон асимптоты будет равен -40 дБ/дек.
Излом характеристики на частоте lgco2 равен -20 дБ/дек., так как в составе W0(p) есть апериодическое звено с постоянной времени Т2. Следовательно, наклон последней асимптоты ЛАЧХ объекта будет равен -60 дБ/дек.
Для построения ЛАЧХ объекта с произвольной передаточной функцией
следует, заменив в ней р на jсо, перейти к выражению для частотной характеристики
Амплитудная частотная характеристика определяется как
что позволяет определить 10(со) в виде
Таким образом, логарифмическая амплитудная частотная характеристика объекта находится как разность логарифмических характеристик его числителя и знаменателя.
Логарифмические частотные характеристики
Министерство образования Российской Федерации
Балтийский государственный технический университет “Военмех”
Кафедра систем обработки информации и управления
В. Ю. ЕМЕЛЬЯНОВ
Конспект лекций
Санкт-Петербург
Логарифмическая амплитудно-частотная характеристика (логарифмическая амплитудная характеристика, ЛАХ) L ( w ) определяется путем преобразования амплитудно-частотной характеристики (АЧХ) A ( w ):
Для логарифмической фазо-частотной характеристики (ЛФЧХ, ЛФХ) используется выражение j ( w ), полученное для обычной фазо-частотной характеристики (ФЧХ).
Очевидно, ЛАХ и ЛФЧХ не содержат новой информации по сравнению с АЧХ и ФЧХ. Целесообразность их получения и использования полностью определяется особыми правилами их построения, предоставляющими широкие возможности для построения удобных и наглядных процедур анализа и синтеза систем управления. Аппарат ЛАХ и ЛФЧХ является основой классической теории линейных непрерывных и дискретных систем.
Необходимо отчетливо представлять себе необходимость точного соблюдения правил построения ЛАХ и ЛФЧХ, так как без этого рассматриваемые характеристики теряют смысл, и их применение с нарушением правил построения приводит к неверным результатам.
При построении рассматриваемых характеристик для горизонтальной оси (оси частот) используется логарифмический масштаб (рис.1), то есть положение конкретных частот на оси соответствует значениям их десятичных логарифмов. Другими словами, в обычном линейном масштабе по горизонтальной оси откладываются не сами частоты w , а значения lg w . Угловая частота, как и обычно, измеряется в 1/с (рад/с), но в силу применяемого масштаба единицей измерения по оси абсцисс является декада (определение приводится ниже).
На рис.1 выше горизонтальной оси указаны значения частот, ниже оси – их десятичных логарифмов.
Отметим следующие обстоятельства, характерные для используемого логарифмического масштаба:
1. Отрицательные частоты не рассматриваются.
2. Отметка частоты w = 0 на оси отсутствует. При w ® 0 lg w ® — ¥ , и соответствующие отметки частоты смещаются по горизонтальной оси влево в бесконечность.
3. Вертикальная ось проводится через отметку частоты, соответствующую нижней границе диапазона существенных частот для изображаемых характеристик.
4. Изменению значения частоты в k раз соответствует отрезок оси постоянной длины независимо от его расположения на оси (то есть абсолютных значений частот).
5. Отрезок горизонтальной оси, соответствующий десятикратному изменению частоты, называется декадой. Длина декады, очевидно, постоянна независимо от ее расположения на оси.
6. В дальнейшем изложении по оси абсцисс откладываются и указываются только значения частоты в логарифмическом масштабе.
На вертикальной оси откладываются в линейном масштабе значения L ( w ) в децибелах. С горизонтальной осью совмещается отметка 0 дБ.
Логарифмическая фазо-частотная характеристика строится совместно с ЛАХ, причем горизонтальная ось у обеих характеристик полностью совпадает, а вертикальная ось для ЛФЧХ совмещается с вертикальной осью ЛАХ следующим образом:
1. Направление положительного отсчета значений ЛФЧХ – вниз.
2. С отметкой 0 дБ для ЛАХ (пересечение с горизонтальной осью) совмещается отметка -180 ° для ЛФЧХ (рис.1).
Рассмотрим некоторые примеры построения логарифмических характеристик, позволяющие обнаружить основные закономерности их формирования.
1. Безынерционное звено:
Характеристики показаны на рис. 2.
,
,
Поскольку вдоль горизонтальной оси используется линейный масштаб для l g w , график L ( w ) будет представлять собой прямую линию (рис. 3). Ее наклон принято измерять в децибелах на декаду (дБ/дек). В рассматриваемом примере при увеличении w в 10 раз, то есть на одну декаду, L ( w ) получит приращение
дБ.
Поэтому наклон ЛАХ здесь составляет +20 дБ/дек.
При w = 1 lg w = 0 , и ЛАХ пересечет горизонтальную ось.
3. Идеальное дифференцирующее звено (общий случай):
,
,
,
.
ЛАХ также будет представлять собой прямую с наклоном +20 дБ/дек и по сравнению с предыдущим примером будет проходить на 20 lgK децибел выше (рис.4).
Точка пересечения ЛАХ с горизонтальной осью может быть найдена из условия:
,
откуда , .
При w =1 значение ЛАХ составит L (1)=20 lg K .
4. Идеальное звено с передаточной функцией :
,
,
.
ЛАХ остается прямой линией, но ее наклон по сравнению с предыдущим случаем увеличится в 2 раза (рис. 5).
ЛАХ пересекает горизонтальную ось при , .
5. Идеальное интегрирующее звено:
,
,
,
.
ЛАХ остается прямой линией (рис.6). Ее приращение при изменении частоты в 10 раз составит:
дБ.
Наклон ЛАХ –20дБ/дек.
Точка пересечения ЛАХ с горизонтальной осью может быть найдена из условия:
.
При K =1 w 1 =1, при w 1 = K .
6. Звено с передаточной функцией :
,
,
.
ЛАХ – прямая линия, но ее наклон по сравнению с предыдущим примером увеличится в 3 раза и составит –60 дБ/дек (рис.7).
Точка пересечения ЛАХ с горизонтальной осью: , .
Нетрудно убедиться, что в общем случае для идеальных звеньев с передаточной функцией вида ЛАХ является прямой с наклоном 20 m дБ/дек и пересекает горизонтальную ось на частоте . При w =1 значение ЛАХ составляет 20 l g K . ЛФЧХ является горизонтальной прямой и проходит на уровне 90. m ° .
Для последующих примеров построение точных логарифмических характеристик возможно только на основе численного расчета, что не вызывает труда при использовании компьютера и программных средств типа MATLAB . Однако для решения практических задач большое значение имеют приемы их приближенного построения и прежде всего – построение асимптотической ЛАХ.
7. Звено с передаточной функцией W ( s )= Ts +1:
,
,
,
.
Графики точных логарифмических характеристик показаны на рис.8.
Асимптотическая ЛАХ может быть построена исходя из следующих соображений.
Вводится сопрягающая частота w с , исходя из условия равенства двух слагаемых, расположенных под корнем в выражении для ЛАХ: слагаемого, содержащего низшую степень частоты и слагаемого, содержащего высшую степень частоты.
Для рассматриваемого примера получим:
, .
Далее рассматриваются два диапазона частот.
Для низких частот, определяемых условием w w с , будет иметь место T w
.
Соответствующий этому выражению график – прямая, совпадающая с левой частью горизонтальной оси, является асимптотой точной ЛАХ при w ® 0 (рис.9).
Для высоких частот, определяемых условием w >> w с , будет иметь место T w >>1, и выражение для ЛАХ приближенно примет вид:
.
Учитывая результат, полученный в примере 3, нетрудно убедиться, что график этого выражения будет представлять собой прямую с наклоном +20дБ/дек (рис.9). Эта прямая является асимптотой точной ЛАХ при w ® ¥ . Она пересечет горизонтальную ось на частоте w 1 =1 / T , то есть асимптоты точной ЛАХ пересекаются на сопрягающей частоте.
Асимптотической ЛАХ называется ломаная линия, состоящая из отрезков асимптот точной ЛАХ. Абсолютная величина погрешности асимптотической ЛАХ по отношению к точной в рассматриваемом примере достигает максимума на сопрягающей частоте и составляет:
.
По мере удаления от сопрягающей частоты влево или вправо она снижается и на расстоянии 0,3 декады от сопрягающей частоты уменьшится примерно в 3 раза:
.
Также можно показать, что на расстоянии 0,5 декады от сопрягающей частоты погрешность уменьшится более, чем в 7 раз, а на расстоянии более декады от сопрягающей частоты будет пренебрежимо мала.
Отметим также некоторые свойства графика ЛФЧХ, соответствующего выражению arct g w T . Так как данное выражение входит в состав выражений для ЛФЧХ большинства более сложных звеньев и систем, эти свойства могут быть использованы для их приближенного анализа.
При w ® 0 асимптотой графика ЛФЧХ является горизонтальная прямая, проходящая через отметку 0 ° . При w ® ¥ асимптота – горизонтальная прямая, проходящая через отметку 90 ° .
На сопрягающей частоте 1/ T значение ЛФЧХ составляет 45 ° . Эта точка является центром симметрии всего графика (рис.10).
Полезно знать также следующие численные значения.
На расстоянии 0.3 декады от сопрягающей частоты ЛФЧХ получает приращение примерно ± 18,5 ° , и ее значения составляют 26,5 ° и 63,5 ° .
На расстоянии 0.5 декады от сопрягающей частоты ЛФЧХ получает приращение примерно ± 27,5 ° , и ее значения составляют 17,5 ° и 72,5 ° .
При удалении от сопрягающей частоты на декаду значение ЛФЧХ изменяется на 39.5 ° и составляет слева 5.5 ° и справа от сопрягающей частоты 84.5 ° .
На больших расстояниях от сопрягающей частоты значения ЛФЧХ изменяются медленно. В ряде случаев при приближенном анализе системы на частотах w 0.1 / T (на декаду и более левее сопрягающей) можно пренебречь значением arct g w T , а на частотах w >10 / T (на декаду и более правее сопрягающей) можно приближенно принять arct g w T » 90 ° .
8. Апериодическое звено 1-го порядка:
,
,
,
.
Примем сначала K =1. Рассмотрев, аналогично предыдущему примеру, низкие и высокие частоты, разделенные их сопрягающей частотой w с =1/ T , нетрудно получить асимптотическую ЛАХ (рис.11). Единственное отличие от предыдущего примера будет состоять в противоположном наклоне второго участка. Он составит –20 дБ/дек.
Слагаемое 20 l g K на всех частотах является константой. Следовательно, при K ¹ 1 весь график сместится вверх при K > 1 (20 l g K >0), а при K l g K 0).
Оценка погрешности асимптотической ЛАХ по отношению к точной аналогична полученной в предыдущем примере (рис.12).
Все результаты, полученные для ЛФЧХ, также сохраняются с учетом противоположного знака (рис. 12).
9. Апериодическое звено второго порядка ( T 1 = T 2 = T ):
,
,
,
.
Сравнивая выражения для ЛАХ, полученные в рассматриваемом и предыдущем примерах, можно сделать вывод о том, что различие в асимптотических ЛАХ будет состоять только в наклоне второго участка. Он увеличится в 2 раза и составит –40дБ/дек.
Максимальная погрешность асимптотической ЛАХ по отношению к точной в соответствии с принципом получения асимптотической ЛАХ также, очевидно, будет иметь место на сопрягающей частоте.
Значение асимптотической ЛАХ на сопрягающей частоте: L ас (1/ T )=20 lgK .
Значение точной ЛАХ на сопрягающей частоте:
.
Абсолютная величина погрешности составит дБ.
График ЛФЧХ и закономерности изменения ее значений будут аналогичны предыдущему примеру с учетом масштабного коэффициента 2.
Характеристики показаны на рис.13.
В общем случае для звена с передаточной функцией W ( s )= K ( Ts +1) m , где m =0, ± 1, ± 2, … получим следующие соотношения:
,
,
.
Отметим следующие закономерности:
— величина сопрягающей частоты, разделяющей участки асимптотической ЛАХ, w с =1/ T ,
— первый участок асимптотической ЛАХ горизонтален и проходит на уровне 20 l g K (при K =1совпадает с горизонтальной осью),
— наклон второго участка 20. m дБ/дек,
— абсолютная величина погрешности асимптотической ЛАХ по отношению к точной максимальна по сопрягающей частоте и составляет 3. m дБ,
— значение ЛФЧХ монотонно изменяется от 0 ° (при w ® 0) до 90 ° × m (при w ® ¥ ); на сопрягающей частоте ее значение составляет 45 ° × m ; эта точка является точкой симметрии всего графика ЛФЧХ.
10. Колебательное звено:
, 0 x
,
,
,
Рассмотрим построение асимптотической ЛАХ.
Под корнем в выражении для ЛАХ здесь присутствует несколько слагаемых. Тем не менее, принцип построения сохраняется. Сопрягающая частота находится из условия равенства двух слагаемых – содержащих низшую и высшую степень частоты:
, .
На низких частотах, w T , всеми слагаемыми, содержащими произведение w T , можно пренебречь по сравнению с единицей ( w T
.
Это уравнение горизонтальной прямой – асимптоты точной ЛАХ при w ® 0.
На высоких частотах, w >>1/ T , под корнем можно пренебречь всеми слагаемыми, кроме содержащего высшую степень частоты. Выражение для ЛАХ приближенно примет вид:
.
Это выражение для прямой с наклоном –40дБ/дек, причем при w T =1, то есть на сопрягающей частоте она проходит через точку с вертикальной координатой 20 l g K . Эта прямая является асимптотой точной ЛАХ при w ® ¥ . Здесь, как и в предыдущих примерах, асимптоты ЛАХ пересекаются на сопрягающей частоте (рис.14), что является общим правилом.
Закономерность формирования погрешностей асимптотической ЛАХ для колебательного звена является более сложной, чем в предыдущих примерах.
Прежде всего, оценим величину этой погрешности на сопрягающей частоте. Для асимптотической ЛАХ получим:
.
.
Величина погрешности зависит от величины x и изменяется от –6 дБ при x ® 1 до сколь угодно больших положительных значений при x ® 0.
Этот эффект обусловлен резонансными свойствами колебательного звена и в общем случае не позволяет при его анализе ограничиваться использованием только асимптотической ЛАХ.
Точные ЛАХ колебательного звена для различных значений x показаны на рис.14.
Из рис.14 видно, что резонансная частота, доставляющая максимум ЛАХ, отличается от сопрягающей. Резонансная частота w р может быть найдена из условия:
.
Общие рекомендации по использованию асимптотической ЛАХ для рассматриваемого примера сводятся к следующему:
— при больших значениях x , когда резонансный пик отсутствует или не превышает величины 3дБ, допустимо использование асимптотической ЛАХ;
— при малых x , когда высота резонансного пика превышает 3дБ, должна использоваться точная ЛАХ.
Значение x , обеспечивающее получение резонансного пика величиной 3дБ, после определения w р, может быть получено из условия:
.
Рекомендуется найти w р и величину x , обеспечивающую величину резонансного пика 3дБ, самостоятельно, а также убедиться в их независимости от параметров K и T .
Логарифмические фазо-частотные характеристики для различных x показаны на рис.15.
Рассмотрим правила построения асимптотических ЛАХ для более сложных передаточных функций на следующем примере:
,
где K =100с-2, T 1 =0.1с, T 2 =10с, T 3 =1с, T 4 =0.01с.
Выражения для АЧХ и точной ЛАХ будут иметь вид:
,
.
Наиболее распространенная в литературе рекомендация сводится к рассмотрению выражения для ЛАХ сложного звена как суммы выражений для ЛАХ рассмотренных выше звеньев, каждому из которых соответствует одна сопрягающая частота. При K =1 график асимптотической ЛАХ такого звена представлял бы собой кусочно-линейную характеристику, состоящую из низкочастотной асимптоты по горизонтальной оси и высокочастотной асимптоты с соответствующим наклоном, пересекающихся на сопрягающей частоте. Если общее выражение для ЛАХ записывать так, чтобы в отдельных слагаемых под знаком логарифма оставались выражения вида , то наклоны таких асимптот будут совпадать по величине с коэффициентами при . Результирующий график асимптотической ЛАХ может быть получен сложением графиков отдельных слагаемых.
Более удобным является предлагаемый ниже способ (при сохранении сформулированного правила записи выражения для ЛАХ). Он состоит в следующей последовательности действий.
1. Определяются сопрягающие частоты, соответствующие отдельным слагаемым, и записываются в порядке возрастания:
; ; ; .
2. Выбирается масштаб для оси частот так, чтобы крайние сопрягающие частоты располагались на расстоянии от 0.5 до 1 декады от краев видимой горизонтальной оси. Через сопрягающие частоты проводятся вертикальные пунктирные прямые (рис.16). Пунктирные прямые делят все поле графика на зоны, которым соответствуют отрезки различных асимптот ЛАХ (участки асимптотических ЛАХ). Построение асимптотической ЛАХ далее уже выполняется последовательно по участкам, начиная с первого.
3. Первый участок расположен левее всех сопрягающих частот. Следовательно, его уравнение, получаемое по условию w будет иметь вид:
.
Это уравнение прямой с наклоном –40 дБ/дек. Для ее построения необходимо найти опорные точки. Например:
— w =0.1, L (0.1)=20 l g 100-40 l g 0.1=40+40=80 дБ.
В качестве опорной может также использоваться точка пересечения данной прямой с горизонтальной осью, координаты которой могут быть найдены из условия L ( w 1 )=0:
,
, .
Отрезок прямой, выходящий за пределы соответствующего участка, показывают пунктирной линией (рис.17).
4. Второй участок расположен правее сопрягающей частоты 1/ T 2 , которой в выражении для ЛАХ соответствует коэффициент +40. По аналогии с рассмотренными выше примерами 7-9 можно придти к выводу, что наклон второго участка по сравнению с первым изменится на величину +40 дБ/дек. В результате второй участок окажется горизонтальным (рис.17).
5. Третий участок разделен со вторым сопрягающей частотой 1/ T 3 . Дополнительный наклон по отношению ко второму участку также соответствует коэффициенту в выражении для ЛАХ, связанному с этой сопрягающей частотой, и равен -60 дБ/дек.
Аналогично путем последовательного учета коэффициентов при соответствующих следующим сопрягающим частотам слагаемых в выражении для ЛАХ могут быть получены и наклоны остальных участков (рис.17).
Отметим еще раз, что непосредственное использование коэффициентов выражения для точной ЛАХ для расчета наклонов участков асимптотической ЛАХ возможно только при условии записи этого выражения так, чтобы частота под знаком логарифма имела первую степень.
Поскольку расстояние между сопрягающими частотами в рассматриваемом примере достаточно велико (1 декада) и сомножителя, вызывающего резонанс, в передаточной функции не содержится, погрешности асимптотической ЛАХ по отношению к точной будут достигать локальных максимумов на сопрягающих частотах, величины которых будут взаимно-однозначно связаны с величинами изменений наклонов ЛАХ (рис.18).
Рассмотрим следующий пример:
,
где K =200с-2, T 1 =0,08с, T 2 =0,5с, T 3 =20с, T 4 =40с.
Здесь в отличие от предыдущего примера, где вертикальные координаты границ участков ЛАХ определялись достаточно очевидно, для их определения потребуются дополнительные расчеты.
Запишем выражение для точной ЛАХ в соответствии со сформулированными выше рекомендациями:
.
Сопрягающие частоты в порядке возрастания:
; ; ; .
Первому участку асимптотической ЛАХ соответствует уравнение:
.
Первый участок – прямая с наклоном +20 дБ/дек.
Опорные точки первого участка:
— L ( w 1 )=0 при w 1 , определяемой из уравнения 20 l g K + 20 l g w 1 =20 l g K w 1 =0, откуда K w 1 =1, w 1 =1/ K =0,005.
Вертикальную координату границы первого участка можно определить непосредственно по его уравнению:
.
Наклон второго участка 20-20=0 дБ/дек (учитывается коэффициент при слагаемом, соответствующем сопрягающей частоте 1/ T 4 ). Участок горизонтален. Вертикальная координата его правой границы также 14 дБ.
Наклон третьего участка 0-20=-20 дБ/дек (учитывается коэффициент при слагаемом, соответствующем сопрягающей частоте 1/ T 3 ). Длина участка составляет l g 2- l g 0,05 » 0,3-(-1,3)=1,6 дек. Вертикальная координата его правой границы 14-20 × 1,6=14-32=-18 дБ.
Наклон четвертого участка –20-40=-60 дБ/дек (учитывается коэффициент при слагаемом, соответствующем сопрягающей частоте 1/ T 2 ). Длина участка l g 12,5- l g 2 » 1,1-0,3=0,8 дек. Вертикальная координата его правой границы примет значение -18-60 × 0,8= -18-48=-64 дБ.
Наклон пятого участка –60+20=-40 дБ/дек (учитывается коэффициент при слагаемом, соответствующем сопрягающей частоте 1/ T 1 ).
В рассматриваемом примере расстояние между сопрягающими частотами 1/ T 4 и 1/ T 3 , 1/ T 2 и 1/ T 1 не достигает декады. Поэтому погрешности асимптотической ЛАХ, связанные с сопрягающими частотами, будут более заметно, чем в предыдущем примере, накладываться друг на друга. В результате на сопрягающих частотах 1/ T 4 и 1/ T 3 погрешность асимптотической ЛАХ увеличится до 4 дБ, на сопрягающей частоте 1/ T 1 погрешность снизится до 2 дБ (рис. 19).
http://hd01.ru/info/kak-postroit-lachh-po-peredatochnoj-funkcii/
http://pandia.ru/text/79/272/58573.php
Запишем
передаточную функцию разомкнутой
системы:
![]()
2.
Заменим в передаточной функции p
на jω.
После подстановки передаточная
функция примет
следующий вид:
![]()
3.
Запишем формулу для расчета АЧХ в
Mathcad.
![]()
4.
Строим
амплитудно–частотную характеристику
разомкнутой системы с помощью
Mathcad.
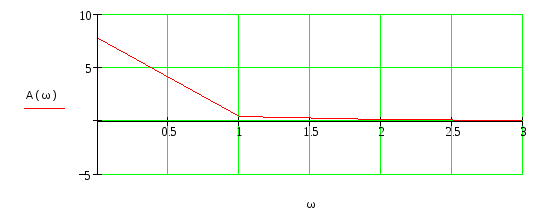
Рис.
4. Амплитудно–частотная характеристика.
По
графику амплитудно–частотной
характеристики определим косвенные
оценки
качества:
1.
Максимальное значение амплитуды Аmax
= 0, т.к.
![]()
2.
Резонансная частота (частота, при которой
амплитуда максимальна) ωР
= 0 (рад/с)
3.
Частота среза ωСР
= 0,93 (рад/с)
Найдем ФЧХ системы
по формуле:
![]()
![]()
Построим график
ФЧХ:
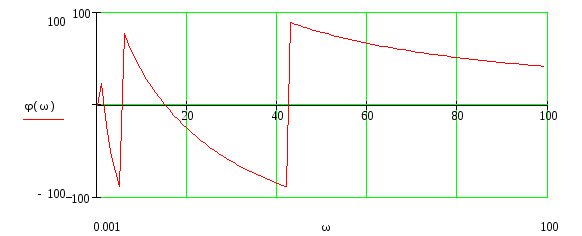
Рис. 5 Фазо–частотная
характеристика.
-
Построение
ЛАЧХ и ЛФЧХ.
1.
Запишем передаточную функцию разомкнутой
системы.
![]()
2.
Заменим в передаточной функции p
на jω.
После подстановки передаточная
функция примет
следующий вид:
![]()
3.
Разобьем передаточную функцию на:
–
вещественную часть
![]()

–
мнимую
часть
![]()

4.
Строим ЛАЧХ и ЛФЧХ:
![]()
![]()
![]()
![]()
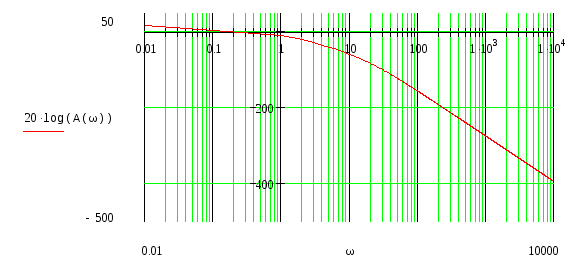
Рис. 6 Логарифмическая
амплитудно–частотная характеристика
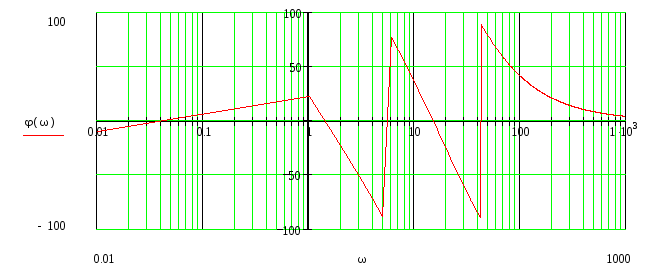
Рис.
7 Логарифмическая фазо–частотная
характеристика.
–запас
устойчивости по фазе γ
= 11,11°.
–запаса
устойчивости по амплитуде нет.
2. Нелинейная часть.
Структурная схема
с нелинейным элементом имеет вид:

W1
W2
Н.Э.
W3
W4
W5













Рис. 8 Структурная
схема с нелинейным элементом.
W1(p)=2.18
W2(p)=![]() W3(p)=
W3(p)=![]() W4(p)=
W4(p)=![]()
W5(p)=![]()
Нелинейный элемент
имеет статическую характеристику вида:
 Y
Y
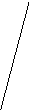


 2
2



 -0.5X
-0.5X
0.5



 -2
-2
Рис. 9 Статическая
характеристика нелинейного элемента
С точки
зрения энергетических затрат, использование
нелинейных элементов нецелесообразно.
Проанализируем статическую характеристику
данного нелинейного элемента на трех
ее участках.
![]() —
—
передаточная функция звена.
Тогда
на первом и третьем участках
![]() ,
,
то есть на этих участках система не
работоспособна.
Работает
система только на втором участке, где
K=![]() =4 (равен тангенсу угла наклона прямой
=4 (равен тангенсу угла наклона прямой
проходящей через начало координат).
Таким
образом, нелинейный элемент в данной
схеме целесообразней заменить линейным
элементом с передаточной функцией
Wne=K,
где К=4 – коэффициент усиления.
Эквивалентная
линеаризованная структурная схема
примет вид:

W1
W2
Wne
W3
W4
W5













Рис. 10 Линеаризованная
структурная схема.
Определим
передаточную функцию системы.
![]()
![]()
Проверим устойчивость
системы по критерию Ляпунова. Для этого
найдем корни характеристического
полинома полученной передаточной
функции.
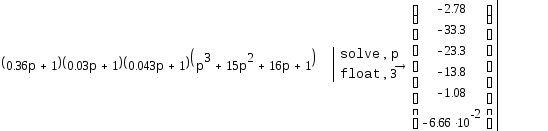
Так
как в результате получили шесть
отрицательных корней, то, согласно
критерию Ляпунова, можно сделать вывод,
что система устойчива.
Если
сравнить передаточную функцию, полученную
в линейной части курсовой работы
![]()
с передаточной функцией линеаризованной
системы
![]() ,
,
то можно сделать вывод, что их отличие
мало. Следовательно, все характеристики
также должны совпадать.
Для исследования
данной системы ее структурную схему
преобразовывают так, чтобы получить
простую одноконтурную схему, в которой
нелинейный элемент и линейная часть
будут соединены последовательно.
Построим переходный
процесс линеаризованной системы.
![]() -передаточная
-передаточная
функция замкнутой системы.
![]()
h(t)=
![]() …
…
![]()

Рис. 11 Переходный
процесс линеаризованной системы.
График переходного
процесса аналогичен переходному процессу
линейной части.
По графику
переходного процесса определим прямые
оценки качества системы:
-
время
переходного процесса
tп
=35 c -
время
первого согласования
t1=2
c -
установившееся
значение hуст
=0.969 -
максимальное
значение hмах
=1.71 -
перерегулирование
76%
Построим АЧХ и
ФЧХ линеаризованной системы.
![]()
Заменим
![]() ,
,
получим:
![]()
![]()
![]()
![]()

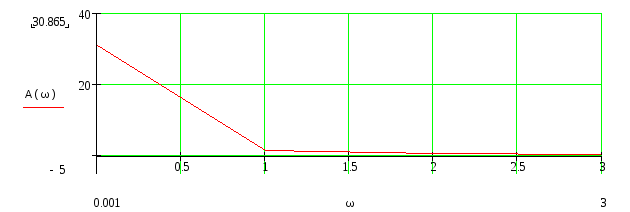
Рис. 12
Амплитудно–частотная характеристика.
Найдем ФЧХ системы
по формуле:
![]()
![]()
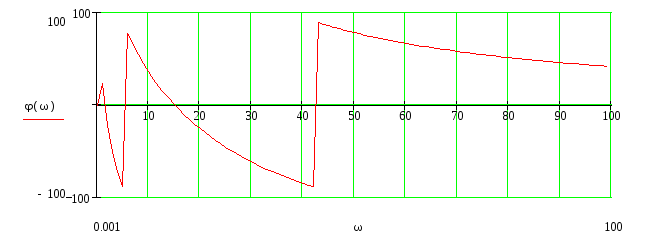
Рис. 13 Фазо–частотная
характеристика.
Построим ЛАЧХ и
ЛФЧХ линеаризованной системы.
![]()
Построим график
ЛФЧХ по функции:
![]()
![]()
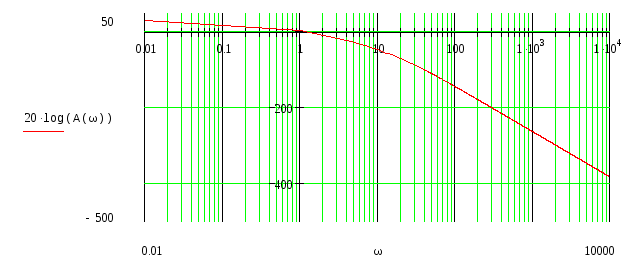
Рис. 14 Логарифмическая
фазо–частотная характеристика.
Таким
образом, можно сделать вывод, что звено
W8=Wne=K
существенно не повлияло на систему в
целом.
Соседние файлы в папке курсовая работа
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #