У любого вектора есть 2 главные характеристики:
- длина (математики говорят «модуль вектора»)
- направление (в какую сторону вектор на рисунке направлен)
Третья характеристика вектора – это его координаты.
Примечание:
Зная координаты вектора, можно найти его длину и направление. Поэтому, задавать информацию о векторе можно двояко: либо указав его длину и направление, либо его координаты.
Что такое координаты вектора
Координаты вектора – это длины его теней на осях координат (его проекции на оси).
Координаты вектора указывают так:
[vec{a} = left{ a_{x}; a_{y} right}]
( a_{x} ) – это «x» координата вектора, проекция вектора ( vec{a} ) на ось Ox;
( a_{y} ) — это «y» координата вектора, проекция вектора ( vec{a} ) на ось Oy;

Рис. 1. Обозначения вектора и его проекций на координатные оси
Координаты вектора можно получить из координат его начальной и конечной точек:
«координата вектора» = «конец» — «начало»
Пример:
( A left( 1;1 right) ) — начальная точка,
( B left( 4;3 right) ) — конечная точка,

Рис. 2. На плоскости отмечены две точки
( overrightarrow {AB} ) – вектор.
[ overrightarrow {AB} = left{ AB_{x}; AB_{y} right} ]
[ begin{cases} AB_{x} = 4 – 1; AB_{x} = 3 \ AB_{y} = 3 – 1; AB_{y} = 2 end{cases} ]
[ overrightarrow {AB} = left{ 3; 2 right} ]

Рис. 3. Вектор и его координаты
Длина вектора (в чем измеряется, как посчитать)
Длину вектора (его модуль) обозначают так:
( left| vec{a} right| ) – длина вектора ( vec{a} ).
Как вычислить длину вектора по его координатам
Когда известны координаты вектора, его длину считают так:
( a_{x} ) и ( a_{y} ) — это числа, координаты вектора ( vec{a} )
Для двухмерного вектора:
[ large boxed { left| vec{a} right| = sqrt{ a_{x}^{2} + a_{y}^{2} } }]
Для трехмерного вектора:
[ large boxed { left| vec{a} right| = sqrt{ a_{x}^{2} + a_{y}^{2} + a_{z}^{2} } } ]
Как вычислить длину вектора с помощью рисунка
Если вектор нарисован на клетчатой бумаге, длину считаем так:
1). Если вектор лежит на линиях клеточек тетради:
— считаем количество клеточек.
Зная масштаб клеток, легко получить длину вектора – умножаем масштаб на количество клеток.

Рис. 4. Вектор располагается вдоль линий, на листке в клетку
2). Если вектор не лежит вдоль линий:
— проводим вертикаль и горизонталь пунктиром.

Рис. 5. Вектор не расположен вдоль линий, разграничивающих листок в клетку
( Delta x ) — горизонталь; ( Delta y ) — вертикаль;
— затем применяем формулу:
[ left| vec{a} right| = sqrt { left(Delta x right)^{2} + left( Delta y right)^{2} } ]
Как указать направление вектора
Указать направление вектора можно с помощью его координат. Так как в его координатах уже содержится информация о длине и направлении вектора.
Бывает так, что координаты вектора неизвестны, а известна только лишь его длина. Тогда направление можно указать с помощью угла между вектором и какой-либо осью.
Для двумерного вектора
Если вектор двумерный, то для указания направления (см. рис. 10) можно использовать один из двух углов:
- угол ( alpha ) между вектором и горизонталью (осью Ox),
- или угол ( beta ) вежду вектором и вертикалью (осью Oy).

Рис. 6. Углы между вектором и осями на плоскости
Словами указать направление вектора можно так:
- вектор длиной 5 единиц направлен под углом 30 градусов к горизонтали;
- Или же: вектор длиной 5 единиц направлен под углом 60 градусов к вертикали.
Такой способ указания координат используют в полярной системе координат.
Для трехмерного вектора
Когда вектор располагается в трехмерном пространстве, чтобы указать, куда вектор направлен, используют два угла.
- угол между вектором и осью Oz;
- и один из углов: между вектором и осью Oy, или между вектором и осью Ox;
Такой способ указания координат используют в сферической системе координат.
Считаем Землю шаром. Расположим ее центр в начале трехмерной системы координат – точке (0 ; 0 ; 0).
Тогда координаты любой точки на поверхности планеты можно указать с помощью радиус-вектора этой точки.
Для указания сферических координат принято использовать:
- длину вектора,
- угол между осью Ox и вектором и
- угол между осью Oz и вектором.
Векторное поле. Векторные линии и их дифференциальные уравнения







По этой ссылке вы найдёте полный курс лекций по математике:
Определение. Если в каждой точке M(x,y,z) пространства или части пространства определена векторная величина то говорят, что там задано векторное поле а. Задание векторного поля равносильно заданию ipex скалярных функций от трех переменных , Примерами векторных полей могут служить: силовое поле — поле некоторой силы F, поле скоростей v течения некоторой жидкости и др.
Для геометрической характеристики векторного поля служат векторные линии. Векторной линией векторного поля а называется кривая, касательная к которой в любой точке М имеет то же направление, что и вектор поля а в этой точке (рис. 7). В силовом поле векторные линии называются силовыми линиями’, в поле скоростей дви-женияжидкости векторные линии называются линиями тока. Рис. 7 3.1.
Дифференциальные уравнения векторных линий Пусть векторное поле определяется вектор-функцией ) — непрерывные функции переменных x, у, z, имеющие ограниченные частные производные первого порядка. Пусть — есть радиус-вектор текущей точки векторной линии векторного поля a (t — параметр). Из определения векторной линии следует, что вектор и вектор касательной к этой кривой должны быть коллинеарны в каждой точке векторной линии. Условием коллинеарности векторов является пропорциональность их координат:
Векторное поле Векторные линии и их дифференциальные уравнения Дифференциальные уравнения векторных линий Поток вектора через поверхность и его свойства Свойства потока вектора через поверхность Понятие ориентации поверхности Таким образом, мы получили для векторных линий систему дифференциальных уравнений в симметричной форме. Допустим, что нам удалось найти два независимых интеграла системы (2): . Система уравнений (3) определяет векторную линию как линию пересечения двух поверхностей. Произвольно меняя параметры с, и Сг, мы получаем семейство векторных линий как семейство с двумя степенями свободы.
Пример 1. Найти векторные линии векторного поля 4 Выписываем дифференциальные уравнения векторных линий, или Интегрируя эту систему, получим два уравнения — произвольные постоянные. Пересечение плоскостей у — Сх с параболическими цилиндрами дает двух параметрическое семейство векторных линий поля (рис.8). Олредрм*т . Векторное поле называется плоским, если все векторы а параллельны одной и той же плоскости и в каждой плоскости, параллельной указан ной, векторное поле одно и то же.
Посмотрим, как плоское векторное поле описывается в координатах.
Если указанную в определении плоскость (или любую ей параллельную) принять за плоскость хОу, то векторы плоского поля не будут содержать компоненты по оси Oz и координаты векторов не будут зависеть от z: Дифференциальные уравнения векторныхл иний плоского поля можно записать в следующем виде Отсюда видно, что векторные линии плоского поля являются плоскими кривыми, лежащими в плоскостях, параллельных плоскости хОу.
Возможно вам будут полезны данные страницы:
Пример 2. Найти векторные линии магнитного поля бесконечно длинного прямого провода. ^ Предположим, что проводник направлен вдоль оси Oz и по нему течет ток силы J, т.е. вектор тока Тогда вектор напряженности Н магнитного поля определяется по формуле — радиус-вектор точхи М, р — расстояние от оси провода до точки М. Раскрывая векторное произведение (6), получим Дифференциальные уравнения векторных линий: Отсюда х = const, = или . Окончательно имеем т.е. векторные линии являются офужносгями с центрами на оси О г (рис.9). Пример 3.
Найти векторные линии поля сил тяготения, образованного притягивающей материальной то*«ой массы ш, расположенной в начале координат. Дифференциальные уравнения векторных линий: стсуда, умножая каждую из дробей на , получим Чтобы получить уравнения векторных линий в параметрической форме, приравняем каждую из дробей величине у. Имеем Это — полупрямые, выходящие из начала координат. Чтобы из семейства векторных линий выделить одну, надо задать точку ), через которую эта векторная линия должна проходить, и по координатам заданной точки определить величины.
Пусть, например, точка А/о имеет координаты . Уравнение векторной линии, проходящей через точку, можно записать так: . Сама точка Л/о получается при значении параметра § 4. Поток вектора через поверхность и его свойства Рассмотрим сначала частный случай поля скоростей v течения жидкости. Выделим в поле некоторую поверхность Потоком жидкости через поверхность Е называется количество жидкости, протекающее через поверхность Е за единицу времени.
Этот поток легко вычислить
если скорость течения постоянна (v = const), а поверхность £ —плоская. В этом случае поток жидкости равен объему цилиндрического тела с параллельными основаниями и образующими длины |v|, так как за единицу времени кажд ая частица перемещается на величину v (рис. 10), где S — площадь основания, — высота цилиндра и n — нормаль к его основанию, Итак, при постоянной скорости v поток жидкости через плоскую поверхность Е равен Если скорость v изменяется непрерывно, а поверхность Е — гладкая, то можно разбить поверхность Е на столь малые части , чтобы каждую часть Е* можно было приближенно считать плоской и вектор v на ней постоянным.
Так как поток жидкости через поверхность Е равен сумме потоков жидкости через все ее части Е*, то мы получаем для вычисления потока приближенную формулу Векторное поле Векторные линии и их дифференциальные уравнения Дифференциальные уравнения векторных линий Поток вектора через поверхность и его свойства Свойства потока вектора через поверхность Понятие ориентации поверхности где п — общее число частей Efc, на которые разбита поверхность Е, Рк — точка, лежащая на fc-ой части, Аак — площадь части Е* поверхности, означает скалярное произведение векторов в точке *(рис. 11).
Назовем потоком жидкости через поверхность Е предел суммы (2) при стремлении к нулю наибольшего из . диаметров площадок Е*, где d — наибольший из диаметров частей . Интеграл (3), определяющий поток жидкости, берется от скалярной функции (v, п°) по площади поверхности Е. Понятие потока произвольного вектора а через поверхность Е вводится по аналогии с введенным выше понятием потока жидкости через поверхность. Определение.
Тогда вектор напряженности поля в любой точке Р будет равен где ч — величина заряда (массы), г ОР — радиус-вектор точки Р. Требуется найти поток вектора напряженности Е через Sn — сферу радиуса R с центром в начале координат. Так как направление нормали к сфере совпадает с направлением радиус-вектора г, и поэтому На сфере 5д радиуса R имеем . Поэтому поток вектора чероз Sn равен 4.1. Свойства потока вектора через поверхность 1. Линейность. где А и ц — постоянные числа. 2. Аддитивность. Если поверхность Е разбита кусочно-гладкой кривой на две части , то поток через поверхность Е равен сумме потоков через поверхности Ei и Е2, Это свойство позволяет распространить понятие потока на кусочно-гладкие поверхности Е.
Понятие ориентации поверхности Взяв, к примеру, цилиндрическую поверхность, замечаем, что если в некоторой ее точке М выбрать определенный (один из двух) единичный вектор нормали и непрерывно перемещаться затем по поверхности вместе с соответствующим вектором нормали по любому пути, не переходящему через край поверхности, то при возвращении в точку М единичный вектор нормали совпадает с исходным (рис. 12). Вместе с тем, существуют поверхности, для которых это не так.
Примером такой поверхности может служить лист Мёбиуса (рис. 13). Существует путь (отмеченная на рисунке пунктиром средняя линия листа), перемещаясь по которому, мы возвратимся в начальную точку с единичным вектором нормали, противоположным исходному. Описанное свойство разбивает все поверхности на два класса — двусторонние, или ориентируемые (плоскость, сфера, поверхность куба и т. п.), и односторонние, или неориентируемые (лист Мёбиуса). 3. Зависимость потока от ориентации поверхности (от ориентации вектора нормали к поверхности). Понятие потока вводится только для двусторонних поверхностей.
Будем считать, что если в одной точке такой поверхности направление вектора нормали уже выбрано, то Рис. 13 в любой другой ее точке берется тот вектор нормали, который получается из выбранного при непрерывном перемещении точки по поверхности (без перехода через границу). В частности, на замкнутой поверхности во всех точках берется либо внешняя нормаль, либо внутренняя (внутренняя нормаль направлена внутрьтела, ограниченного замкнутой поверхностью).
Обозначим через ту сторону поверхности £, на которой выбран вектор нормали п+ = п, а через Е
— сторону поверхности Е, на которой берется вектор нормали (п_ = -п). Тогда получим (7) где . Таким образом, при изменении ориентации поверхности (при изменении направления вектора нормали п° к поверхности Е) поток вектора меняет знак на противоположный.
Пример 2. Вычислить поток радиус-вектора через поверхность прямого кругового цилиндра высоты Н с радиусом основания R и осью Ог. Поверхность состоит из трех частей: боковой поверхности £j, верхнего основания £2 и нижнего основания £3 цилиндра. Искомый поток П в силу свойства аддитивности равен — потоки данного поля через и соответственно. На боковой поверхности цилиндра вектор внешней нормали п? параллелен плоскости хОу, и поэтому (см. рис. 14).
Следовательно, Векторное поле Векторные линии и их дифференциальные уравнения Дифференциальные уравнения векторных линий Поток вектора через поверхность и его свойства Свойства потока вектора через поверхность Понятие ориентации поверхности На верхнем основании £2 вектор нормали параллелен оси Oz, и поэтому можно положить п§ = к-Тогда имеем так что На нижнем основании вектор г перпендикулярен к вектору нормали п» = -к. Поэтому Здесь символ означает двойной интеграл по замкнутой поверхности,
Присылайте задания в любое время дня и ночи в ➔ 
Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
Координаты вектора в декартовой системе координат (ДСК)
Для начала дадим определение координат вектора в заданной системе координат. Чтобы ввести данное понятие, определим что мы называем прямоугольной или декартовой системой координат.
Прямоугольная система координат представляет из себя прямолинейную систему координат с взаимно перпендикулярными осями на плоскости или в пространстве.
С помощью введения прямоугольной системы координат на плоскости или в трехмерном пространстве становится возможным описывание геометрических фигур вместе с их свойствами при помощи уравнений и неравенств, то есть использовать алгебраические методы при решении геометрических задач.
Тем самым, мы можем привязать к заданной системе координат векторы. Это значительно расширит наши возможности при решении определенных задач
Прямоугольная система координат на плоскости обычно обозначается O x y , где O x и O y – оси коорднат. Ось O x называют осью абсцисс, а ось O y – осью ординат (в пространстве появляется ещё одна ось O z , которая перпендикулярна и O x и O y ).
Итак, нам дана прямоугольная декартова система координат O x y на плоскости если мы отложим от начала координат векторы i → и j → , направление которых соответственно совпадет с положительными направлениями осей O x и O y , и их длина будет равна условной единице, мы получим координатные векторы. То есть в данном случае i → и j → являются координатными векторами.
Координатные векторы
Векторы i → и j → называются координатными векторами для заданной системы координат.
Откладываем от начала координат произвольный вектор a → . Опираясь на геометрическое определение операций над векторами, вектор a → может быть представлен в виде a → = a x · i → + a y · j → , где коэффициенты a x и a y — единственные в своем роде, их единственность достаточно просто доказать методом от противного.
Разложение вектора
Разложением вектора a → по координатным векторам i → и j → на плоскости называется представление вида a → = a x · i → + a y · j → .
Коэффициенты a x и a y называются координатами вектора в данной системе координат на плоскости.
Координаты вектора в данной системе координат принято записывать в круглых скобках, через запятую, при этом заданные координаты следует отделять от обозначения вектора знаком равенства. К примеру, запись a → = ( 2 ; — 3 ) означает, что вектор a → имеет координаты ( 2 ; — 3 ) в данной системе координат и может быть представлен в виде разложения по координатным векторам i → и j → как a → = 2 · i → — 3 · j → .
Следует обратить внимание, что порядок записи координат, имеет важное значение, если вы запишите координаты вектора в другом порядке, вы получите совершенно другой вектор.
Опираясь на определения координат вектора и их разложения становится очевидным, что единичные векторы i → и j → имеют координаты ( 1 ; 0 ) и ( 0 ; 1 ) соответственно, и они могут быть представлены в виде следующих разложений i → = 1 · i → + 0 · j → ; j → = 0 · i → + 1 · j → .
Также имеет место быть нулевой вектор 0 → с координатами ( 0 ; 0 ) и разложением 0 → = 0 · i → + 0 · j → .
Равные и противоположные векторы
Векторы a → и b → равны тогда, когда их соответствующие координаты равны.
Противоположным вектором называется вектор противоположный данному.
Отсюда следует, что координаты такого вектора будут противоположны координатам данного вектора, то есть, — a → = ( — a x ; — a y ) .
Все вышеизложенное можно аналогично определить и для прямоугольной системы координат, заданной в трехмерном пространстве. В такой системе координат имеет место быть тройка координатных векторов i → , j → , k → , а произвольный вектор a → раскладывается не по двум, а уже по трем координатам, причем единственным образом и имеет вид a → = a x · i → + a y · j → + a z · k → , а коэффициенты этого разложения ( a x ; a y ; a z ) называются координатами вектора в данной (трехмерной) системе координат.
Следовательно, координатные векторы в трехмерном пространстве принимают также значение 1 и имеют координаты i → = ( 1 ; 0 ; 0 ) , j → = ( 0 ; 1 ; 0 ) , k → = ( 0 ; 0 ; 1 ) , координаты нулевого вектора также равны нулю 0 → = ( 0 ; 0 ; 0 ) , и в таком случае два вектора будут считаться равными, если все три соответствующие координаты векторов между собой равны a → = b → ⇔ a x = b x , a y = b y , a z = b z , и координаты противоположного вектора a → противоположны соответствующим координатам вектора a → , то есть, — a → = ( — a x ; — a y ; — a z ) .
Координаты радиус-вектора точки
Чтобы ввести данное определение, требуется показать в данной системе координат связь координат точки и координат вектора.
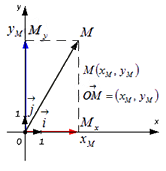
Пусть нам дана некоторая прямоугольная декартова система координат O x y и на ней задана произвольная точка M с координатами M ( x M ; y M ) .
Вектор O M → называется радиус-вектором точки M .
Определим, какие координаты в данной системе координат имеет радиус-вектор точки
Вектор O M → имеет вид суммы O M → = O M x → + O M y → = x M · i → + y M · j → , где точки M x и M y это проекции точки М на координатные прямые Ox и Oy соответственно (данные рассуждения следуют из определения проекция точки на прямую), а i → и j → — координатные векторы, следовательно, вектор O M → имеет координаты ( x M ; y M ) в данной системе координат.
Иначе говоря, координаты радиус-вектора точки М равны соответствующим координатам точки М в прямоугольной декартовой системе координат.
Аналогично в трехмерном пространстве радиус-вектор точки M ( x M ; y M ; z M ) разлагается по координатным векторам как O M → = O M x → + O M y → + O M z → = x M · i → + y M · j → + z M · k → , следовательно, O M → = ( x M ; y M ; z M ) .
Теории поля с примерами решения и образцами выполнения
Теория поля — крупный раздел физики, механики, математики, в котором изучаются скалярные, векторные, тензорные поля.
К рассмотрению скалярных и векторных полей приводят многие задачи физики, электротехники, математики, механики и других технических дисциплин. Изучение одних физических полей способствует изучению и других. Так, например, силы всемирного тяготения, магнитные, электрические силы — все они изменяются обратно пропорционально квадрату расстояния от своего источника; диффузия в растворах происходит по законам, общим с распространением тепла в различных средах; вид силовых магнитных линий напоминает картину обтекания препятствий жидкостью и т. д.
Математическим ядром теории поля являются такие понятия, как градиент, поток, потенциал, дивергенция, ротор, циркуляция и другие. Эти понятия важны и в усвоении основных идей математического анализа функций многих переменных.
Полем называется область V пространства, в каждой точке которой определено значение некоторой величины. Если каждой точке М этой области соответствует определенное число U = U(M), говорят, что в области определено (задано) скалярное поле (или функция точки). Иначе говоря, скалярное поле — это скалярная функция U(М) вместе с ее областью определения. Если же каждой точке М области пространства соответствует некоторый вектор  , то говорят, что задано векторное поле (или векторная функция точки).
, то говорят, что задано векторное поле (или векторная функция точки).
Примерами скалярных полей могут быть поля температуры (воздуха, тела, …), атмосферного давления, плотности (массы, воздуха, …), электрического потенциала и т.д. Примерами векторных полей являются поле силы тяжести, поле скоростей частиц текущей жидкости (ветра), магнитное поле, поле плотности электрического тока и т. д.
Если функция  не зависит от времени, то скалярное (векторное) поле называется стационарным (или установившимся); поле, которое меняется с течением времени (меняется, например, скалярное поле температуры при охлаждении тела), называется нестационарным (или неустановившимся).
не зависит от времени, то скалярное (векторное) поле называется стационарным (или установившимся); поле, которое меняется с течением времени (меняется, например, скалярное поле температуры при охлаждении тела), называется нестационарным (или неустановившимся).
Далее будем рассматривать только стационарные поля.
Если V — область трехмерного пространства, то скалярное поле U можно рассматривать как функцию трех переменных х, у, z (координат точки М):

(Наряду с обозначениями  используют запись
используют запись  — радиус-вектор точки М.)
— радиус-вектор точки М.)
Если скалярная функция U (М) зависит только от двух переменных, например х и у, то соответствующее скалярное поле U(х; у) называют плоским.
Аналогично: вектор  , определяющий векторное поле, можно рассматривать как векторную функцию трех скалярных аргументов
, определяющий векторное поле, можно рассматривать как векторную функцию трех скалярных аргументов 
Вектор можно представить (разложив его по ортам координатных осей) в виде

где P(x;y;z), Q(x;y;z ), R(x;y;z) — проекции вектора  на оси координат. Если в выбранной системе координат Oxyz одна из проекций вектора равна нулю, а две другие зависят только от двух переменных, то векторное поле называется плоским. Например,
на оси координат. Если в выбранной системе координат Oxyz одна из проекций вектора равна нулю, а две другие зависят только от двух переменных, то векторное поле называется плоским. Например, 
Векторное поле называется однородным, если — постоянный вектор, т. е. Р, R и Q — постоянные величины. Таким полем является поле тяжести. Здесь Р = О, Q — О, R = — mg, g — ускорение силы тяжести, m — масса точки.
В дальнейшем будем предполагать, что скалярные функции (U(x;y;z) — определяющая скалярное поле, P(x;y;z), Q(x;y;z) и R(x; у; z) — задающие векторное поле) непрерывны вместе со своими частными производными.
Пример:
Функция  определяет скалярное поле в точках пространства, ограниченного сферой с центром в начале координат и радиусом R = 1; скалярное поле
определяет скалярное поле в точках пространства, ограниченного сферой с центром в начале координат и радиусом R = 1; скалярное поле  определено во всем пространстве, за исключением точек оси Oz (на ней
определено во всем пространстве, за исключением точек оси Oz (на ней  ).
).
Пример:
Найти поле линейной скорости  материальной точки М, вращающейся против часовой стрелки с угловой скоростью
материальной точки М, вращающейся против часовой стрелки с угловой скоростью  вокруг оси Oz (см. п. 7.4).
вокруг оси Oz (см. п. 7.4).
Решение:
Угловую скорость представим в виде вектора , лежащего на оси Oz, направленного вверх. Имеем:

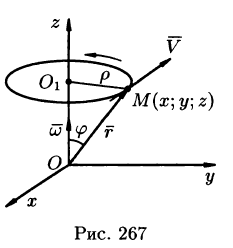
Построим радиус-вектор  точки М (см. рис. 267).
точки М (см. рис. 267).
Численное значение линейной скорости (модуль), как известно из курса физики, равно  , где р — расстояние вращающейся точки M(x;y,z) от оси вращения (оси Oz).Но
, где р — расстояние вращающейся точки M(x;y,z) от оси вращения (оси Oz).Но  — угол между вектором r и осью Oz). Следовательно,
— угол между вектором r и осью Oz). Следовательно, 
Вектор скорости направлен в сторону вращения, совпадает с направлением векторного произведения  векторы
векторы  образуют правую тройку). Следовательно,
образуют правую тройку). Следовательно,  т. е.
т. е.
или 
Поле линейных скоростей тела, вращающегося вокруг неподвижной оси, есть плоское векторное поле.

Скалярное поле
Поверхности и линии уровня:
Рассмотрим скалярное поле, задаваемое функцией U = U(x,y,z). Для наглядного представления скалярного поля используют поверхности и линии уровня.
Поверхностью уровня скалярного поля называется геометрическое место точек, в которых функция U(М) принимает постоянное значение, т. е.

Давая в уравнении (70.1) величине с различные значения, получим различные поверхности уровня, которые в совокупности как бы расслаивают поле. Через каждую точку поля проходит только одна поверхность уровня. Ее уравнение можно найти путем подстановки координат точки в уравнение (70.1).
Для скалярного поля, образованного функцией
поверхностями уровня является множество концентрических сфер с центрами в начале координат:  В частности, при с = 1 получим
В частности, при с = 1 получим  , т. е. сфера стягивается в точку.
, т. е. сфера стягивается в точку.
Для равномерно раскаленной нити поверхности уровня температурного поля (изотермические поверхности) представляют собой круговые цилиндры, общей осью которых служит нить.
В случае плоского поля U — U(х; у) равенство U(x; у) = с представляет собой уравнение линии уровня поля, т. е. линия уровня —это линия на плоскости Оху, в точках которой функция U (х; у) сохраняет постоянное значение.
В метеорологии, например, сети изобар и изотерм (линии одинаковых средних давлений и одинаковых средних температур) являются линиями уровня и представляют собой функции координат точек местности.
Линии уровня применяются в математике при исследовании поверхностей методом сечений (см. п. 12.9).
Производная по направлению
Для характеристики скорости изменения поля U =U(М) в заданном направлении введем понятие «производной по направлению».
Возьмем в пространстве, где задано поле U = U(x;y;z), некоторую точку М и найдем скорость изменения функции U при движении точки М в произвольном направлении  . Пусть вектор имеет начало в точке М и направляющие косинусы
. Пусть вектор имеет начало в точке М и направляющие косинусы 
Приращение функции U, возникающее при переходе от точки М к некоторой точке  в направлении вектора определяется как
в направлении вектора определяется как


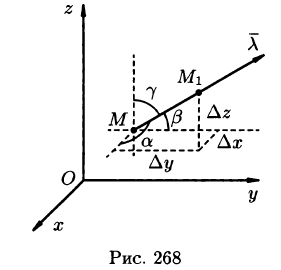

Производной от функции U = U(M) в точке М по направлению называется предел

Производная по направлению и характеризует скорость изменения функции (поля) в точке М по этому направлению. Если  > 0, то функция U возрастает в направлении , если
> 0, то функция U возрастает в направлении , если 
где  — бесконечно малые функции при
— бесконечно малые функции при  (см. п. 44.3). Поскольку
(см. п. 44.3). Поскольку


Переходя к пределу при получим формулу для вычисления производной по направлению:

В случае плоского поля U = U(x;y) имеем:

Формула (70.2) принимает вид:
Замечание:
Понятие производной по направлению является обобщением понятия частных производных  Их можно рассматривать как производные от функции и по направлению координатных осей Ох, Оу и Oz. Так, если направление совпадает с положительным направлением оси Ох, то, положив в формуле (70.2)
Их можно рассматривать как производные от функции и по направлению координатных осей Ох, Оу и Oz. Так, если направление совпадает с положительным направлением оси Ох, то, положив в формуле (70.2)  получим
получим
Пример:
Найти производную функции  в точке М(0; 1; 2) в направлении от этой точки к точке
в точке М(0; 1; 2) в направлении от этой точки к точке 
Решение:
Находим вектор  и его направляющие косинусы:
и его направляющие косинусы:

Находим частные производные функции и вычисляем их значения в точке М:
Следовательно, по формуле (70.2) имеем:

Поскольку jj^- Градиент скалярного поля и его свойства
В каком направлении производная имеет наибольшее значение? Это направление указывает вектор, называемый градиентом скалярного поля.
Можно заметить, что правая часть равенства (70.2) представляет собой скалярное произведение единичного вектора

и некоторого вектора
Вектор, координатами которого являются значения частных производных функции U(x,y,z) в точке M(x;y,z), называют градиентом функции и обозначают gradU, т. е. 
Отметим, что grad U есть векторная величина. Говорят: скалярное поле U порождает векторное поле градиента U. Теперь равенство (70.2) можно записать в виде

где  угол между вектором grad U и направлением (см. рис. 269).
угол между вектором grad U и направлением (см. рис. 269).
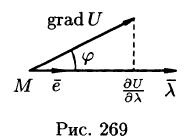
Из формулы (70.3) сразу следует, что производная по направлению достигает наибольшего значения, когда  Таким образом, направление градиента совпадает с направлением А, вдоль которого функция (поле) меняется быстрее всего, т. е. градиент функции указывает направление наибыстрейшего возрастания функции. Наибольшая скорость изменения функции U в точке М равна
Таким образом, направление градиента совпадает с направлением А, вдоль которого функция (поле) меняется быстрее всего, т. е. градиент функции указывает направление наибыстрейшего возрастания функции. Наибольшая скорость изменения функции U в точке М равна

В этом состоит физический смысл градиента. На указанном свойстве градиента основано его широкое применение в математике и других дисциплинах.
Приведем важные свойства градиента функции.
1.Градиент направлен по нормали к поверхности уровня, проходящей через данную точку.
Действительно, по любому направлению вдоль поверхности уровня  Но тогда из (70.3) следует, что
Но тогда из (70.3) следует, что 
Доказываются эти свойства на основании определения градиента. Докажем, например, последнее свойство. Имеем:

Замечание. Приведенные свойства градиента функции остаются справедливыми и для плоского поля.
Пример:
Найти наибольшую скорость возрастания функции

Решение:

Наибольшая скорость возрастания функции равна

Отметим, что функция U будет убывать с наибольшей скоростью  , если точка А движется в направлении
, если точка А движется в направлении  (антиградиентное направление).
(антиградиентное направление).
Векторное поле
Векторные линии поля:
Рассмотрим векторное поле, задаваемое вектором  . Изучение поля удобно начинать с понятия векторных линий; они являются простейшими геометрическими характеристиками поля.
. Изучение поля удобно начинать с понятия векторных линий; они являются простейшими геометрическими характеристиками поля.
Векторной линией поля  называется линия, касательная к которой в каждой ее точке М имеет направление соответствующего ей вектора
называется линия, касательная к которой в каждой ее точке М имеет направление соответствующего ей вектора  .
.
Это понятие для конкретных полей имеет ясный физический смысл. Например, в поле скоростей текущей жидкости векторными линиями будут линии, по которым движутся частицы жидкости (линии тока); для магнитного поля векторными (силовыми) линиями будут линии, выходящие из северного полюса и оканчивающиеся в южном.
Совокупность всех векторных линий поля, проходящих через некоторую замкнутую кривую, называется векторной трубкой.
Изучение векторного поля обычно начинают с изучения расположения его векторных линий. Векторные линии поля

описываются системой дифференциальных уравнений вида
Действительно, пусть PQ — векторная линия поля,  — ее радиус-вектор. Тогда вектор
— ее радиус-вектор. Тогда вектор  направлен по касательной к линии PQ в точке М (см. рис. 270). В силу коллинеарности векторов
направлен по касательной к линии PQ в точке М (см. рис. 270). В силу коллинеарности векторов  следует пропорциональность их проекций, т. е. равенства (71.2).
следует пропорциональность их проекций, т. е. равенства (71.2).
Пример:
Найти векторные линии поля линейных скоростей тела, вращающегося с постоянной угловой скоростью вокруг оси Oz.
Решение:
Это поле определено вектором  (см. пример 69.2). Согласно (71.2), имеем:
(см. пример 69.2). Согласно (71.2), имеем:

Интегрируя, получим:  т. е. векторные линии данного поля представляют собой окружности с центрами на оси Oz, лежащие в плоскостях, перпендикулярных к этой оси.
т. е. векторные линии данного поля представляют собой окружности с центрами на оси Oz, лежащие в плоскостях, перпендикулярных к этой оси.
Поток поля
Пусть векторное поле образовано вектором (71.1). Для наглядности будем считать  вектором скорости некоторого потока жидкости, движущейся стационарно. Представим, что некоторая поверхность S находится в этом потоке и пропускает жидкость. Подсчитаем, какое количество жидкости протекает через поверхность S.
вектором скорости некоторого потока жидкости, движущейся стационарно. Представим, что некоторая поверхность S находится в этом потоке и пропускает жидкость. Подсчитаем, какое количество жидкости протекает через поверхность S.
Выберем определенную сторону поверхности S. Пусть  — единичный вектор нормали к рассматриваемой стороне поверхности S. Разобьем поверхность на элементарные площадки
— единичный вектор нормали к рассматриваемой стороне поверхности S. Разобьем поверхность на элементарные площадки  Выберем в каждой площадке точку
Выберем в каждой площадке точку  (см. рис. 271) и вычислим значения вектора скорости в каждой точке: .
(см. рис. 271) и вычислим значения вектора скорости в каждой точке: . .
.
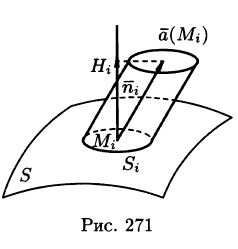
Будем приближенно считать каждую площадку плоской, а вектор  постоянным по модулю и одинаково направленным в каждой точке площадки. Тогда за единицу времени через
постоянным по модулю и одинаково направленным в каждой точке площадки. Тогда за единицу времени через  протекает количество жидкости, приближенно равное
протекает количество жидкости, приближенно равное  — площадь i-й площадки,
— площадь i-й площадки, — высота i-гo цилиндра с образующей
— высота i-гo цилиндра с образующей  . Но Я, является проекцией вектора на нормаль
. Но Я, является проекцией вектора на нормаль  — единичный вектор нормали к поверхности в точке
— единичный вектор нормали к поверхности в точке  . Следовательно, общее количество жидкости, протекающее через всю поверхность S за единицу времени, найдем, вычислив сумму
. Следовательно, общее количество жидкости, протекающее через всю поверхность S за единицу времени, найдем, вычислив сумму
Точное значение искомого количества жидкости получим, взяв предел найденной суммы при неограниченном увеличении числа элементарных площадок и стремлении к нулю их размеров (диаметров  площадок):
площадок):

Независимо от физического смысла поля полученный интеграл называют потоком векторного поля.
Потоком вектора через поверхность S называется интеграл по поверхности от скалярного произведения вектора поля на единичный вектор нормали к поверхности, т. е.

Рассмотрим различные формы записи потока вектора. Так как


где  — проекция вектора а на направление нормали
— проекция вектора а на направление нормали  — дифференциал (элемент) площади поверхности.
— дифференциал (элемент) площади поверхности.
Иногда формулу (71.3) записывают в виде
где вектор  направлен по нормали к поверхности, причем
направлен по нормали к поверхности, причем 

— проекции вектора на соответствующие координатные оси, то поток (71.3) вектора , можно записать в виде

Используя взаимосвязь поверхностных интегралов I и II рода (см. формулу (58.8)), поток вектора можно записать как

Отметим, что поток К вектора а есть скалярная величина. Величина К равна объему жидкости, которая протекает через поверхность S за единицу времени. В этом состоит физический смысл потока (независимо от физического смысла поля).
Особый интерес представляет случай, когда поверхность замкнута и ограничивает некоторый объем V. Тогда поток вектора записывается в виде

В этом случае за направление вектора п обычно берут направление внешней нормали и говорят о потоке изнутри поверхности S (см. рис. 272).
Если векторное поле  есть поле скоростей текущей жидкости, то величина потока К через замкнутую поверхность дает разность между количеством жидкости, вытекающей из области V (объема V) и втекающей в нее за единицу времени (в точках поверхности S, где векторные линии выходят из объема V, внешняя нормаль образует с вектором острый угол и
есть поле скоростей текущей жидкости, то величина потока К через замкнутую поверхность дает разность между количеством жидкости, вытекающей из области V (объема V) и втекающей в нее за единицу времени (в точках поверхности S, где векторные линии выходят из объема V, внешняя нормаль образует с вектором острый угол и  в точках, где векторные линии входят в объем,
в точках, где векторные линии входят в объем,  ).
).
При этом если К > 0, то из области V вытекает больше жидкости, чем в нее втекает. Это означает, что внутри области имеются дополнительные источники.
Если К 
Пример:
Найти поток вектора  через верхнюю сторону треугольника, полученного при пересечении плоскости Зх + 6у — 2z — 6 =0 с координатными плоскостями (см. рис. 274).
через верхнюю сторону треугольника, полученного при пересечении плоскости Зх + 6у — 2z — 6 =0 с координатными плоскостями (см. рис. 274).
Решение:
Поток найдем методом проектирования на три координатные плоскости. Для этого воспользуемся формулой (71.5). В нашем случае Р = z, Q = —х, R = у. Имеем:

Расчленим этот поверхностный интеграл на три слагаемых, затем сведем их вычисление к вычислению двойных интегралов. Нормаль к верхней стороне треугольника образует с осью Ох тупой угол, с осью Оу — тупой, а с осью Oz — острый угол. (Единичный вектор данной плоскости есть  на верхней стороне
на верхней стороне 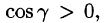 поэтому надо выбрать знак «минус»; получим:
поэтому надо выбрать знак «минус»; получим:

Итак,  Находим
Находим
В результате имеем: 
Пример:
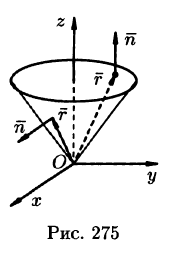
Найти поток радиус-вектора  через внешнюю сторону поверхности прямого конуса, вершина которого совпадает с точкой O(0; 0;0), если известны радиус основания R и высота конуса H (см. рис. 275).
через внешнюю сторону поверхности прямого конуса, вершина которого совпадает с точкой O(0; 0;0), если известны радиус основания R и высота конуса H (см. рис. 275).
Решение:

Очевидно, что

т. к. 
Дивергенция поля. Формула Остроградского-Гаусса
Важной характеристикой векторного поля (71.1) является так называемая дивергенция, характеризующая распределение и интенсивность источников и стоков поля.
Дивергенцией (или расходимостью) векторного поля

в точке М называется скаляр вида  и обозначается символом
и обозначается символом  , т. е.
, т. е.

Отметим некоторые свойства дивергенции.
- Если
 — постоянный вектор, то
— постоянный вектор, то - где с = const.
- т. е. дивергенция суммы двух векторных функций равна сумме дивергенции слагаемых.
- Если U — скалярная функция, — вектор, то

 где с = const.
где с = const. т. е. дивергенция суммы двух векторных функций равна сумме дивергенции слагаемых.
т. е. дивергенция суммы двух векторных функций равна сумме дивергенции слагаемых.
Эти свойства легко проверить, используя формулу (71.6). Докажем, например, справедливость свойства 4.
Так как  то
то
Используя понятия потока и дивергенции векторного поля, запишем известную в анализе (см. (58.9)) формулу Остроградского-Гаусса

в так называемой векторной форме.
Рассматривал область V, ограниченную замкнутой поверхностью S, в векторном поле (71.1), можно утверждать, что левая часть формулы (71.7) есть поток вектора через поверхность S; подынтегральная функция правой части формулы есть дивергенция вектора . Следовательно, формулу (71.7) можно записать в виде

(в котором она чаще всего и встречается).
Формула Остроградского-Гаусса означает, что поток векторного поля через замкнутую поверхность S (в направлении внешней нормали, т. е. изнутри) равен тройному интегралу от дивергенции этого поля по объему V, ограниченному данной поверхностью.
Используя формулу (71.8), можно дать другое определение дивергенции векторного поля в точке М (не связанное с выбором координатных осей).
По теореме о среднем для тройного интеграла (см. п. 54.1) имеем:
где  — некоторая (средняя) точка области V. Тогда формулу (71.8) можно переписать в виде
— некоторая (средняя) точка области V. Тогда формулу (71.8) можно переписать в виде  Отсюда
Отсюда
Пусть поверхность S стягивается в точку. Тогда  , и мы получаем выражение для
, и мы получаем выражение для  в точке М:
в точке М:

Дивергенцией векторного поля в точке М называется предел отношения потока поля через (замкнутую) поверхность S, окружающую точку М, к объему тела, ограниченного этой поверхностью, при условии, что вся поверхность стягивается в точку 
Определение (71.9) дивергенции эквивалентно (можно показать) определению (71.6).
Как видно из определения, дивергенция векторного поля в точке является скалярной величиной. Она образует скалярное поле в данном векторном поле.
Исходя из физического смысла потока (обычно условно считают, что есть поле скоростей фиктивного стационарного потока несжимаемой жидкости), можно сказать, что: при  точка М представляет собой источник, откуда жидкость вытекает, при
точка М представляет собой источник, откуда жидкость вытекает, при  точка М есть сток, поглощающий жидкость. Как следует из равенства (71.9), величина характеризует мощность (интенсивность, плотность) источника или стока в точке М. В этом состоит физический смысл дивергенции.
точка М есть сток, поглощающий жидкость. Как следует из равенства (71.9), величина характеризует мощность (интенсивность, плотность) источника или стока в точке М. В этом состоит физический смысл дивергенции.
Понятно, что если в объеме V, ограниченном замкнутой поверхностью S, нет ни источников, ни стоков, то 
Векторное поле, в каждой точке которого дивергенция поля равна нулю, т. е.  называется соленоидалъным (или трубчатым).
называется соленоидалъным (или трубчатым).
Пример:
Найти дивергенцию поля линейных скоростей  жидкости, вращающейся как твердое тело вокруг неподвижной оси с постоянной угловой скоростью .
жидкости, вращающейся как твердое тело вокруг неподвижной оси с постоянной угловой скоростью .
Решение:
Примем ось вращения жидкости за ось Oz. Тогда, как показано ранее (см. пример 69.2),  Имеем:
Имеем:

Поле — соленоидальное.
Циркуляция поля
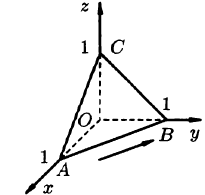
Пусть векторное поле образовано вектором (71.1). Возьмем в этом поле некоторую замкнутую кривую L и выберем на ней определенное направление.
Пусть  — радиус-вектор точки М на контуре L. Известно, что вектор
— радиус-вектор точки М на контуре L. Известно, что вектор  направлен по касательной к кривой в направлении ее обхода (см. рис. 276) и
направлен по касательной к кривой в направлении ее обхода (см. рис. 276) и  — дифференциал дуги кривой
— дифференциал дуги кривой 
Криволинейный интеграл по замкнутому контуру L от скалярного произведения вектора на вектор  , касательный к контуру L, называется циркуляцией вектора а вдоль L, т. е.
, касательный к контуру L, называется циркуляцией вектора а вдоль L, т. е.

Рассмотрим различные формы записи циркуляции. Так как

где  — проекция вектора на касательную
— проекция вектора на касательную  , проведенную в направлении обхода кривой L, то равенство (71.10) можно записать в виде
, проведенную в направлении обхода кривой L, то равенство (71.10) можно записать в виде


Циркуляция С, записанная в виде (71.12) имеет простой физический смысл: если кривая L расположена в силовом поле, то циркуляция — это работа силы поля при перемещении материальной точки вдоль L (п.56.5).
Отметим, что вдоль замкнутых векторных линий циркуляция отлична от нуля, потому что в каждой точке векторной линии скалярное произведение  сохраняет знак: положительный, если направление вектора совпадает с направлением обхода векторной линии; отрицательный — в противном случае.
сохраняет знак: положительный, если направление вектора совпадает с направлением обхода векторной линии; отрицательный — в противном случае.
Пример:
Найти циркуляцию вектора поля линейных скоростей вращающегося тела (см. пример 69.2)  вдоль замкнутой кривой L, лежащей в плоскости
вдоль замкнутой кривой L, лежащей в плоскости  , перпендикулярной оси вращения.
, перпендикулярной оси вращения.
Решение:
Будем считать, что направление нормали к плоскости совпадает с направлением оси Oz. Согласно формуле (71.12), имеем:

где S — площадь поверхности, ограниченной кривой L (см. 56.17).
Заметим, что если нормаль к поверхности S образует угол  с осью Oz, то циркуляция будет равна
с осью Oz, то циркуляция будет равна  с изменением угла величина С изменяется.
с изменением угла величина С изменяется.
Пример:
Вычислить циркуляцию векторного поля

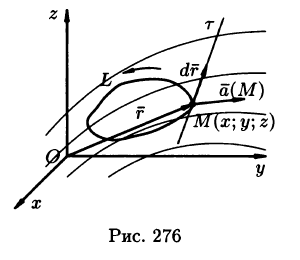
вдоль периметра треугольника с вершинами A(1;0;0), В(0;1;0), С(0;0;1) (см. рис. 277).
Решение:
Согласно формуле (71.12), имеем:

На отрезке AB: x + у = 1, z = 0, следовательно,

На отрезке ВС: у + z = 1, х = 0, следовательно,

На отрезке СА: х + z = 1, у = 0, следовательно,


Ротор поля. Формула Стокса
Ротором (или вихрем) векторного поля

называется вектор, обозначаемый  и определяемый формулой
и определяемый формулой

Формулу (71.13) можно записать с помощью символического определителя в виде, удобном для запоминания:
Отметим некоторые свойства ротора.
- Если — постоянный вектор, то
- т. е. ротор суммы двух векторов равен сумме роторов слагаемых.
- Если U — скалярная функция, а — векторная, то

 т. е. ротор суммы двух векторов равен сумме роторов слагаемых.
т. е. ротор суммы двух векторов равен сумме роторов слагаемых.
Эти свойства легко проверить, используя формулу (71.13). Покажем, например, справедливость свойства 3:
Используя понятия ротора и циркуляции, векторного поля, запишем известную в математическом анализе (см. п. 58.4) формулу Стокса:

Левая часть формулы (71.14) представляет собой циркуляцию вектора по контуру L, т. е.  (см. (71.11)). Интеграл в правой части формулы (71.14) представляет собой поток вектора
(см. (71.11)). Интеграл в правой части формулы (71.14) представляет собой поток вектора  через поверхность S, ограниченную контуром L (см. (71.3)), т. е.
через поверхность S, ограниченную контуром L (см. (71.3)), т. е.
Следовательно, формулу Стокса можно записать в виде

Такое представление формулы Стокса называют ее векторной формой. В этой формуле положительное направление на контуре L и выбор стороны у поверхности S согласованы между собой так же, как в теореме Стокса.
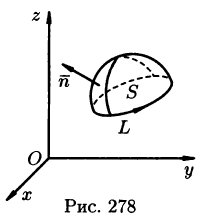
Формула (71.15) показывает, что циркуляция вектора вдоль замкнутого контура L равна потоку ротора этого вектора через поверхность S, лежащую в поле вектора а и ограниченную контуром L (натянутую на контур) (см. рис. 278).
Используя формулу (71.14), можно дать другое определение ротора поля, эквивалентное первому и не зависящее от выбора координатной системы.
Для этого применим формулу Стокса (71.15) для достаточно малой плоской площадки S с контуром L, содержащей точку М.
По теореме о среднем для поверхностного интеграла (п. 57.1, свойство 7) имеем:
где  — некоторая (средняя) точка площадки S (см. рис. 279).
— некоторая (средняя) точка площадки S (см. рис. 279).
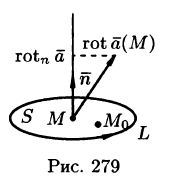
Тогда формулу (71.15) можно записать в виде
Пусть контур L стягивается в точку М. Тогда  Перейдя к пределу, получаем:
Перейдя к пределу, получаем:
Ротором вектора в точке М называется вектор, проекция которого на каждое направление равна пределу отношения циркуляции вектора а по контуру L плоской площадки S, перпендикулярной этому направлению, к площади этой площадки.
Как видно из определения, ротор вектора есть векторная величина, образующая собственное векторное поле.
Дадим физическое истолкование понятия ротора векторного поля. Найдем ротор поля линейных скоростей твердого тела, вращающегося вокруг оси Oz с постоянной угловой скоростью (пример 69.2)  , т. е. ротор вектора
, т. е. ротор вектора 
По определению ротора
Ротор этого поля направлен параллельно оси вращения, его модуль равен удвоенной угловой скорости вращения.
С точностью до числового множителя ротор поля скоростей представляет собой угловую скорость вращения твердого тела. С этим связано само название «ротор» (лат. «вращатель»).
Замечание:
Из определения (71.13) ротора вытекает, что направление ротора — это направление, вокруг которого циркуляция имеет наибольшее значение (плотность) по сравнению с циркуляцией вокруг любого направления, не совпадающего с нормалью к площадке S.
Так что связь между ротором и циркуляцией аналогична связи между градиентом и производной по направлению (см. п. 70.3).
Оператор Гамильтона
Векторные дифференциальные операции первого порядка:
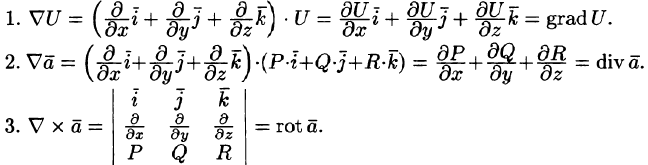
Основными дифференциальными операциями (действиями) над скалярным полем U и векторным полем являются gradU,  Действия взятия градиента, дивергенции и ротора называются векторными операциями первого порядка (в них участвуют только первые производные).
Действия взятия градиента, дивергенции и ротора называются векторными операциями первого порядка (в них участвуют только первые производные).
Эти операции удобно записывать с помощью так называемого оператора Гамильтона
Этот символический вектор называют также оператором  (читается «набла»); он приобретает определенный смысл лишь в комбинации со скалярными или векторными функциями. Символическое «умножение» вектора на скаляр U или вектор производится по обычным правилам векторной алгебры, а «умножение» символов
(читается «набла»); он приобретает определенный смысл лишь в комбинации со скалярными или векторными функциями. Символическое «умножение» вектора на скаляр U или вектор производится по обычным правилам векторной алгебры, а «умножение» символов  на величины
на величины  понимают как взятие соответствующей частной производной от этих величин.
понимают как взятие соответствующей частной производной от этих величин.
Применяя оператор Гамильтона, получим дифференциальные операции первого порядка:
Оператор Гамильтона применяется для записи и других операций и для вывода различных формул в теории поля. При действиях с ним надо пользоваться правилами векторной алгебры и правилами дифференцирования.
В частности, производная по направлению (70.2) может быть записана в виде
где 
Векторные дифференциальные операции второго порядка
После применения оператора Гамильтона к скалярному или векторному полю получается новое поле, к которому можно снова применить этот оператор. В результате получаются дифференциальные операции второго порядка. Нетрудно убедиться, что имеется лишь пять дифференциальных операций второго порядка:

(Понятно, что операция  например, не имеет смысла:
например, не имеет смысла:  — скаляр, говорить о дивергенции скаляра, т. е. о бессмысленно.)
— скаляр, говорить о дивергенции скаляра, т. е. о бессмысленно.)
Запишем явные выражения для дифференциальных операций второго порядка, используя оператор Гамильтона. Заметим при этом, что оператор действует только на множитель, расположенный непосредственно за оператором.

Правая часть этого равенства называется оператором Лапласа скалярной функции U и обозначается  . Таким образом,
. Таким образом,

Дифференциальное уравнение Лапласа  играет важную роль в различных разделах математической физики. Решениями уравнения Лапласа являются так называемые гармонические функции.
играет важную роль в различных разделах математической физики. Решениями уравнения Лапласа являются так называемые гармонические функции.
Замечание. К равенству (72.1) можно прийти, введя в рассмотрение скалярный оператор дельта:
(который тоже называют оператором Лапласа).
2.  так как векторное произведение двух одинаковых векторов равно нулю (нуль-вектор). Это означает, что поле градиента есть поле безвихревое.
так как векторное произведение двух одинаковых векторов равно нулю (нуль-вектор). Это означает, что поле градиента есть поле безвихревое.
4.  так как смешанное произведение трех векторов, из которых два одинаковые, равно нулю. Это означает, что поле вихря — соленоидальное.
так как смешанное произведение трех векторов, из которых два одинаковые, равно нулю. Это означает, что поле вихря — соленоидальное.

так как двойное векторное произведение обладает свойством

Здесь  — векторная величина, полученная в результате применения оператора Лапласа к вектору .
— векторная величина, полученная в результате применения оператора Лапласа к вектору .
Некоторые свойства основных классов векторных полей
Соленоидальное поле
Напомним, что векторное поле называется соленоидальным, если во всех точках его дивергенция поля равна нулю, т. е.
Примерами соленоидальных полей являются: поле линейных скоростей вращающегося твердого тела (см. пример 71.4); магнитное поле, создаваемое прямолинейным проводником, вдоль которого течет электрический ток, и другие.
Приведем некоторые свойства соленоидального поля.
- В соленоидальном поле поток вектора через любую замкнутую поверхность равен нулю. Это свойство непосредственно вытекает из формулы (71.8). Таким образом, соленоидальное поле не имеет источников и стоков.
- Соленоидальное поле является полем ротора некоторого векторного поля, т. е. если , то существует такое поле , что . Вектор называется векторным потенциалом поля.
 , что
, что  . Вектор
. Вектор Любое из свойств 1-2 можно было бы взять в качестве определения соленоидального поля.
Доказывать свойство 2 не будем. Отметим лишь, что обратное утверждение — поле ротора векторного поля есть соленоидальное — нами доказано (выше мы показали, что  ).
).
3. В соленоидальном поле поток вектора через поперечное сечение векторной трубки сохраняет постоянное значение (называемое интенсивностью трубки).
Рассмотрим векторную трубку между двумя ее произвольными сечениями  боковую поверхность трубки обозначим через S (см. рис. 280). Поток вектора через замкнутую поверхность, состоящую из
боковую поверхность трубки обозначим через S (см. рис. 280). Поток вектора через замкнутую поверхность, состоящую из  равен нулю. Следовательно,
равен нулю. Следовательно,

где n — внешняя нормаль.
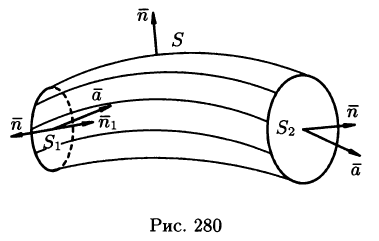
Так как на боковой поверхности векторной трубки нормаль п перпендикулярна к векторам поля, то  и, следовательно,
и, следовательно,
Переменив направление нормали на площадке  , т.е. взяв внутреннюю нормаль
, т.е. взяв внутреннюю нормаль  получим:
получим:
В поле скоростей текущей жидкости полученный результат означает, что количество жидкости, втекающей в трубку за единицу времени, равно количеству жидкости, вытекающей из нее.
Потенциальное поле
Векторное поле  называется потенциальным (или безвихревым, или градиентным), если во всех точках поля ротор равен нулю, т. е.
называется потенциальным (или безвихревым, или градиентным), если во всех точках поля ротор равен нулю, т. е.  Примером потенциального поля является электрическое поле напряженности точечного заряда (и другие).
Примером потенциального поля является электрическое поле напряженности точечного заряда (и другие).
Приведем основные свойства потенциального поля.
Свойство 1. Циркуляция потенциального поля по любому замкнутому контуру в этом поле равна нулю.
Это непосредственно вытекает из формулы (71.14). Следовательно,
В частности, для силового потенциального поля это означает, что работа силы по любому замкнутому контуру равна нулю; в поле скоростей текущей жидкости равенство С = 0 означает, что в потоке нет замкнутых струек, т. е. нет водоворотов.
Свойство 2. В потенциальном поле криволинейный интеграл  вдоль любой кривой L с началом в точке
вдоль любой кривой L с началом в точке  и концом в точке
и концом в точке  зависит только от положения точек
зависит только от положения точек  и не зависит от формы кривой.
и не зависит от формы кривой.
Это свойство вытекает из свойства 1. Действительно, взяв в поле две точки соединим их двумя кривыми  так, чтобы контур
так, чтобы контур  лежал внутри поля (см. рис. 281). Тогда, в силу свойства 1, имеем
лежал внутри поля (см. рис. 281). Тогда, в силу свойства 1, имеем

Учитывая свойства криволинейного интеграла, получаем:

Свойство 3. Потенциальное поле является полем градиента некоторой скалярной функции U(x; y; z), т. е. если  , то существует функция U (х; у; z) такая, что
, то существует функция U (х; у; z) такая, что 
Из равенства  вытекает, что
вытекает, что  т. е. выражение Pdx + Qdy + Rdz является полным дифференциалом некоторой функции U = U(x;y;z) (следствие 56.1). Эту функцию называют потенциалом векторного поля
т. е. выражение Pdx + Qdy + Rdz является полным дифференциалом некоторой функции U = U(x;y;z) (следствие 56.1). Эту функцию называют потенциалом векторного поля

Отсюда:  Следовательно,
Следовательно,

т. е. вектор поля является градиентом скалярного поля.
Замечание. Из равенства rot grad U = 0 следует обратное утверждение — поле градиента скалярной функции U = U(x;y; z) является потенциальным.
Из равенства  следует, что потенциальное поле определяется заданием одной скалярной функции U = U(x; у; z) — его потенциала. Потенциал векторного поля может быть найден по формуле
следует, что потенциальное поле определяется заданием одной скалярной функции U = U(x; у; z) — его потенциала. Потенциал векторного поля может быть найден по формуле
где  — координаты фиксированной точки, (x;y;z) — координаты произвольной точки. Потенциал определяется с точностью до произвольного постоянного слагаемого (из-за того, что grad (U + а) = grad U ).
— координаты фиксированной точки, (x;y;z) — координаты произвольной точки. Потенциал определяется с точностью до произвольного постоянного слагаемого (из-за того, что grad (U + а) = grad U ).
Произвольное же векторное поле требует задания трех скалярных функций (P(x;y;z), Q(x;y;z), R(x;y,z) — проекции вектора поля на оси координат).
Замечание. Определение потенциального поля может быть дано иначе — векторное поле называется потенциальным, если оно является градиентом некоторого скалярного поля, т. е.  . (Иногда пишут ; знак «минус» пишут для удобства, обычно векторные линии направлены в сторону убывания U: поток жидкости направлен туда, где давление меньше; теплота перемещается от более нагретого места к менее нагретому и т. д.)
. (Иногда пишут ; знак «минус» пишут для удобства, обычно векторные линии направлены в сторону убывания U: поток жидкости направлен туда, где давление меньше; теплота перемещается от более нагретого места к менее нагретому и т. д.)
Пример:
Установить потенциальность поля

и найти его потенциал.
Решение:

Следовательно, поле вектора потенциальное.
Найдем потенциал U по формуле (73.1), выбирая в качестве фиксированной точки начало координат, т. е.  Так как
Так как


Гармоническое поле
Векторное поле называется гармоническим (или лапласовым), если оно одновременно является потенциальным и соленоидальным, т. е. если 
Примером гармонического поля является поле линейных скоростей стационарного безвихревого потока жидкости при отсутствии в нем источников и стоков.
Так как поле потенциально, то его можно записать в виде  — потенциал поля.
— потенциал поля.
Но так как поле одновременно и соленоидальное, то

или, что то же самое,
т. е. потенциальная функция U гармонического поля а является решением дифференциального уравнения Лапласа. Такая функция называется, как уже упоминали, гармонической.
Решение заданий и задач по предметам:
Дополнительные лекции по высшей математике:


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
http://zaochnik.com/spravochnik/matematika/vektory/koordinaty-vektora-v-dsk/
http://lfirmal.com/teorii-polya/
Как найти радиус вектор точки
Радиус-вектор в декартовых координатах
Радиус-вектор точки — это называется вектор, начало которого совпадает с началом системы координат, а конец — с данной точкой.
Таким образом, особенностью радиус-вектора, отличающего его от всех других векторов, является то, что его начало всегда находится в точке начала координат (рис. 17).
Введение понятия радиус-вектора оказалось чрезвычайно плодотворным при изучении различных физических явлений. В частности, это понятие широко используется в механике.
Как известно, положение точки можно задать с помощью ее координат. Так, если известны координаты x1 и y1 точки В или координаты x2 и y2 точки С, то мы легко находим положения этих точек на плоскости. Этот способ определения положения точки с помощью ее координат называется координатным способом.
Модуль радиус-вектора
— по теореме Пифагора.
Механическое движение. Система отсчета. Материальная точка.
Механическое движение – это процесс изменения положения данного тела в пространстве с течением времени относительно другого тела, которое мы считаем неподвижным.
Тело, условно принятое за неподвижное – тело отсчета.
Тело отсчета – это тело, относительно которого опре-деляется положение другого тела.
Обычно в качестве тела отсчета выбирается земля, но может быть и движущийся относительно земли предмет: автомобиль, лодка, самолет и т.д.
Система отсчета – это тело отсчета, система координат, жестко связанная с ним, и прибор для измерения времени движения.
Простейшей системой координат является прямоугольная декартова система (рис. 2). Система координат нужна для определения положения тела относительно тела отсчета. Выбор системы отсчета зависит от условий дан-ной задачи.
Движение реальных тел, как правило, сложное. Для упрощения рас-смотрения движений пользуются моделями. Одними из первых моделей реальных тел являются абсолютное твердое тело и материальная точка.
Материальной точкой называется тело, размерами и формой которого можно пренебречь в данной задаче. Данное понятие является математической абстракцией. Одно и то же тело в одних задачах можно рассматривать как материальную точку, а в других задачах – нельзя. Например, радиус Земли RЗемли равен 6400 км, расстояние между Солнцем и Землей L равно 150 000 000 км (L >> RЗемли). Рассматривая движение Земли относительно Солнца, радиусом Земли можно пре-небречь и считать, что Земля – материальная точка. Однако если нужно выяснить причины смены времен года, то Землю уже нельзя считать матери-альной точкой, а надо учитывать ее размеры, вращение вокруг оси и т.д. Мы будем изучать механическое движение материальной точки для того, чтобы потом определить движение реального тела.
Радиус-вектор. Проекции радиус-вектора. Модуль радиус-вектора.
Ра?диус-ве?ктор (обычно обозначается или просто ) — вектор, задающий положения точки в пространстве (например, гильбертовом или векторном) относительно некоторой заранее фиксированной точки, называемой началом координат.
Для произвольной точки в пространстве, радиус-вектор — это вектор, идущий из начала координат в эту точку.
Длина радиус-вектора, или его модуль, определяет расстояние, на котором точка находится от начала координат, а стрелка указывает направление на эту точку пространства.
На плоскости углом радиус-вектора называется угол, на который радиус-вектор повёрнут относительно оси абсцисс в направлении против часовой стрелки.
Радиус-вектор в декартовых координатах
Радиус-вектор точки — это называется вектор, начало которого совпадает с началом системы координат, а конец — с данной точкой.
Таким образом, особенностью радиус-вектора, отличающего его от всех других векторов, является то, что его начало всегда находится в точке начала координат (рис. 17).
Введение понятия радиус-вектора оказалось чрезвычайно плодотворным при изучении различных физических явлений. В частности, это понятие широко используется в механике.
Как известно, положение точки можно задать с помощью ее координат. Так, если известны координаты x1 и y1 точки В или координаты x2 и y2 точки С, то мы легко находим положения этих точек на плоскости. Этот способ определения положения точки с помощью ее координат называется координатным способом.
— по теореме Пифагора.
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: Студент — человек, постоянно откладывающий неизбежность. 10572 —  | 7332 —
| 7332 —  или читать все.
или читать все.
78.85.5.224 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
Физика и техника.
Физика тесно связана и с техникой, причем эта связь имеет двусторонний характер.
Физика выросла из потребностей техники. Так, развитие механики у древних греков было вызвано запросами строительной и военной техники того времени.
Развитие техники, в свою очередь, определяет направление физических исследований. Например, в свое время задача создания наиболее экономичных тепловых двигателей вызвала бурное развитие термодинамики. А началось все с того, что Джеймс Уатт заметил, что крышка кипящего чайника немного приподнимается под действием пара.
С другой стороны, от развития физики зависит технический уровень производства.
Физика лежит в основе создания новых отраслей техники (электронная техника, ядерная техника и др.).
Бурный темп развития физики, растущие связи ее с техникой указывают на значительную роль курса физики во втузе.
Физика является фундаментальной основой для теоретической подготовки инженера, без которой его успешная практическая деятельность невозможна.
Развитие механики как науки начинается с III в. до н. э., когда древнегреческий ученый Архимед (287—212 до н. э.) сформулировал закон равновесия рычага и законы равновесия плавающих тел. Основные законы механики установлены итальянским физиком и астрономом Г. Галилеем (1564—1642) и окончательно сформулированы английским ученым И. Ньютоном (1643—1727).
Механическим движением называется изменение положения тела относительно других тел с течением времени.
Материальной точкой называется тело, размерами и формой которого в данных условиях можно пренебречь.
Положение материальной точки указывается при помощи радиус-вектора  , соединяющего начало системы координат с данной точкой:
, соединяющего начало системы координат с данной точкой:
 , (1.1)
, (1.1)
где  — единичные векторы, направленные вдоль соответствующих осей координат: OX, OY, OZ. Значения координат
— единичные векторы, направленные вдоль соответствующих осей координат: OX, OY, OZ. Значения координат  данной материальной точки определяют проекции радиус-вектора на оси координат.
данной материальной точки определяют проекции радиус-вектора на оси координат.
Модуль радиус-вектора вычисляется по формуле:
 . (1.2)
. (1.2)
Единичным вектором  в направлении вектора называется вектор вида
в направлении вектора называется вектор вида
 . (1.3)
. (1.3)
Если положение точки в пространстве изменяется, то радиус-вектор зависит от времени:
 . (1.4)
. (1.4)
Это векторная форма кинематического закона движения точки.
Конец радиус-вектора при движении точки описывает в пространстве кривую, называемую траекторией движения точки. Зависимость (1.4) эквивалентна системе уравнений:
 (1.5)
(1.5)
Зависимость вида (1.5) называется координатной формой кинематического закона движения точки.
Расстояние между двумя положениями 1 и 2 материальной точки в пространстве определяется по формуле:
 , (1.6)
, (1.6)
где  ,
,  ,
,  — разности координат материальной точки, отсчитанные вдоль осей OX, OY и OZ. Вектор, соединяющий точки 1 и 2, называется вектором перемещения. Он равен разности радиус-векторов точек 2 и 1:
— разности координат материальной точки, отсчитанные вдоль осей OX, OY и OZ. Вектор, соединяющий точки 1 и 2, называется вектором перемещения. Он равен разности радиус-векторов точек 2 и 1:
 . (1.7)
. (1.7)
Действительно, из рисунка 1.1 видно, что вектор  равен геометрической сумме векторов
равен геометрической сумме векторов  и
и  :
:  . Из последнего уравнения и следует выражение (1.7).
. Из последнего уравнения и следует выражение (1.7).
С другой стороны вектор перемещения может быть представлен через разности координат:
 . (1.8)
. (1.8)
Поэтому модуль вектора перемещения из точки 1 в точку 2 определяется по формуле (1.6).
Изменение положения материальной точки с течением времени характеризуется вектором мгновенной скорости, который определяется как производная от радиус-вектора материальной точки по времени[1]:
 (1.9)
(1.9)


Вектор мгновенной скорости точки направлен по касательной к траектории в сторону движения точки. Его можно представить в виде:
 , (1.10)
, (1.10)
где проекции  ,
,  и
и  вектора мгновенной скорости на соответствующие оси координат вычисляются по формулам:
вектора мгновенной скорости на соответствующие оси координат вычисляются по формулам:
 . (1.11)
. (1.11)
С другой стороны, радиус-вектор материальной точки можно представить в виде:
 ,
,
где  — единичный вектор, совпадающий по направлению с радиус-вектором точки. Тогда, в соответствии с формулой (1.9), вектор мгновенной скорости точки равен:
— единичный вектор, совпадающий по направлению с радиус-вектором точки. Тогда, в соответствии с формулой (1.9), вектор мгновенной скорости точки равен:
 .
.
Первая составляющая:  — направлена вдоль радиус-вектора и характеризует быстроту изменения его модуля.
— направлена вдоль радиус-вектора и характеризует быстроту изменения его модуля.
Вторая составляющая:  — связана с быстротой изменения направления радиус-вектора. Дело в том, что единичный вектор по величине не может изменяться и единственным способом его изменения является вращение вокруг некоторой оси. Поэтому производная от единичного вектора по времени
— связана с быстротой изменения направления радиус-вектора. Дело в том, что единичный вектор по величине не может изменяться и единственным способом его изменения является вращение вокруг некоторой оси. Поэтому производная от единичного вектора по времени  равна произведению угловой скорости
равна произведению угловой скорости  вращения радиус-вектора на перпендикулярный к нему единичный вектор
вращения радиус-вектора на перпендикулярный к нему единичный вектор  , направленный в сторону возрастания угла
, направленный в сторону возрастания угла  :
:
 .
.
В целях наглядности, рассмотренные кинематические характеристики  ,
,  и
и  , возникающие, например, при движении материальной точки в плоскости x, y по некоторой криволинейной траектории, представлены на рисунке 1.2.
, возникающие, например, при движении материальной точки в плоскости x, y по некоторой криволинейной траектории, представлены на рисунке 1.2.

Модуль вектора мгновенной скорости определяется следующим образом:
 . (1.12)
. (1.12)
Направление вектора мгновенной скорости определяется при помощи направляющих косинусов:
 . (1.13)
. (1.13)
Средняя скорость  перемещения материальной точки за время от
перемещения материальной точки за время от  до
до  определяется по формуле:
определяется по формуле:
 , (1.14)
, (1.14)
где — вектор перемещения точки за то же время.
Из предыдущей формулы следует, что перемещение можно выразить через среднюю скорость перемещения:
 . (1.15)
. (1.15)
Путь определяют как длину дуги между точками 1 и 2. При смещении материальной точки вдоль траектории на бесконечно малую величину, ее путь можно записать следующим образом:
 .
.
Проинтегрировав полученное выражение по времени от  до
до  , найдем, что:
, найдем, что:
 , (1.16)
, (1.16)
где  — производная от
— производная от  по
по  ,
,  — производная от
— производная от  по ,
по ,  и
и  — значения координаты
— значения координаты  в моменты времени и
в моменты времени и  , соответственно. Зависимость
, соответственно. Зависимость  называют естественной формой кинематического закона движения точки.
называют естественной формой кинематического закона движения точки.
Изменение вектора скорости с течением времени характеризуется вектором мгновенногоускорения, который определяется как производная от вектора скорости по времени:
 . (1.17)
. (1.17)
Вектор ускорения материальной точки можно представить в виде:
 , (1.18)
, (1.18)
где  ,
,  и
и  — проекции вектора ускорения на соответствующие оси координат.
— проекции вектора ускорения на соответствующие оси координат.
Модуль вектора ускорения вычисляется следующим образом:
 . (1.19)
. (1.19)
Направляющие косинусы вектора ускорения равны
 . (1.20)
. (1.20)
Ускорение характеризует изменение величины и направления скорости в целом. Оно может быть представлено в виде векторной (геометрической) суммы тангенциального и нормального ускорений:
 . (1.21)
. (1.21)
Модуль ускорения выражается через модули тангенциального и нормального ускорений при помощи теоремы Пифагора:
 . (1.22)
. (1.22)
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: Для студентов недели бывают четные, нечетные и зачетные. 9465 — | 7448 — или читать все.
78.85.5.224 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
Отложим от начала координат единичные векторы, то есть векторы, длины которых равны единице. Направление вектора i → должно совпадать с осью O x , а направление вектора j → с осью O y .
Векторы i → и j → называют координатными векторами.
Координатные векторы неколлинеарны. Поэтому любой вектор p → можно разложить по векторам p → = x i → + y j → . Коэффициенты x и y определяются единственным образом. Коэффициенты разложения вектора p → по координатным векторам называются координатами вектора p → в данной системе координат.
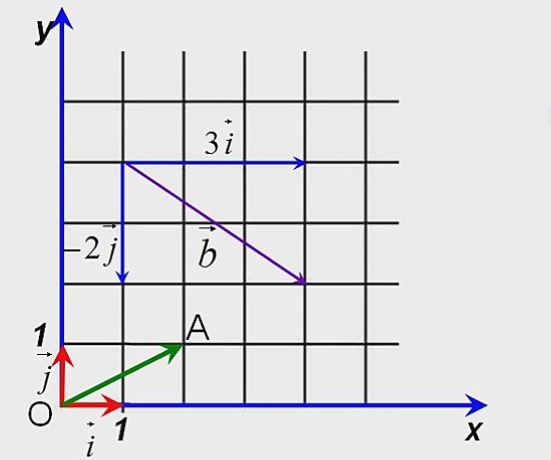
Координаты вектора записываются в фигурных скобках p → x ; y . На рисунке вектор O A → имеет координаты 2 ; 1 , а вектор b → имеет координаты 3 ; — 2 . Нулевой вектор представляется в виде 0 → 0 ; 0 .
Если векторы a → и b → равны, то и y 1 = y 2 . Запишем это так: a → = x 1 i → + y 1 j → = b → = x 2 i → + y 2 j → , значит x 1 = x 2 , y 1 = y 2 .
Таким образом, координаты равных векторов соответственно равны.
Если точка координат не совпадает с его началом системы координат, тогда рассмотрим задачу. Пусть в декартовой системе координат на O x y заданы координаты точек начала и конца A B → : A x a , y a , B x b , y b . Найти координаты заданного вектора.
Изобразим координатную ось.
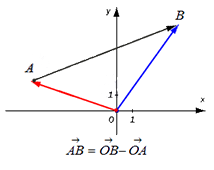
Из формулы сложения векторов имеем O A → + A B → = O B → , где O – начало координат. Отсюда следует, что A B → = O B → — O A → .
O A → и O B → – это радиус-векторы заданных точек А и В, значит координаты точек имеют значения O A → = x a , y a , O B → = x b , y b .
По правилу операций над векторами найдем A B → = O B → — O A → = x b — x a , y b — y a .
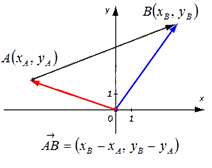
Нахождение в трехмерном пространстве проходит по такому же принципу, только для трех точек.
Для нахождения координат вектора, необходимо найти разность его точек конца и начала.
Найти координаты O A → и A B → при значении координат точек A ( 2 , — 3 ) , B ( — 4 , — 1 ) .
Для начала определяется радиус-вектор точки A . O A → = ( 2 , — 3 ) . Чтобы найти A B → , нужно вычесть значение координат точек начала из координат точек конца.
Получаем: A B → = ( — 4 — 2 , — 1 — ( — 3 ) ) = ( — 6 , 2 ) .
Ответ: O A → = ( 2 , — 3 ) , A B → = ( — 6 , — 2 ) .
Задано трехмерное пространство с точкой A = ( 3 , 5 , 7 ) , A B → = ( 2 , 0 , — 2 ) . Найти координаты конца A B → .
Подставляем координаты точки A : A B → = ( x b — 3 , y b — 5 , z b — 7 ) .
По условию известно, что A B → = ( 2 , 0 , — 2 ) .
Известно, что равенство векторов справедливо тогда, когда координаты равны соответственно. Составим систему уравнений: x b — 3 = 2 y b — 5 = 0 z b — 7 = — 2
Отсюда следует, что координаты точки B A B → равны: x b = 5 y b = 5 z b = 5
Ответ: B ( 5 , 5 , 5 ) .