Применение поверхностей первого и второго порядков
в задачах на экстремум функций
Общая постановка задачи поиска экстремума функций приведена здесь. Рассмотрим задачу поиска безусловного экстремума функций двух переменных.
Аналитический метод поиска локального безусловного экстремума
Пусть задана дважды непрерывно дифференцируемая функция двух переменных.
Точка называется точкой локального минимума, если существует такая окрестность этой точки, для всех точек которой выполняется условие
Если знак неравенства заменить на знак
, то получится определение локального максимума. Точки локального минимума или максимума называются точками локального экстремума функции.
Требуется найти точки локального экстремума функции .
Порядок решения поставленной задачи содержит два этапа.
На первом этапе при помощи необходимых условий экстремума первого порядка:
(4.74)
находятся стационарные точки , «подозрительные» на наличие локального экстремума (частные производные первого порядка в точке
равны нулю).
На втором этапе проверяются достаточные условия экстремума, а если они не выполняются, то и необходимые условия второго порядка. Они следуют из формулы Тейлора для приращения функции в точке (учитывая члены до второго порядка включительно):
где
а члены с производными первого порядка отсутствуют, так как точка удовлетворяет (4.74).
Равенство
(4.75)
можно рассматривать как уравнение поверхности второго порядка относительно неизвестных
. Уравнение (4.75) можно записать в матричной форме
(4.76)
где — матрица квадратичной формы, называемая матрицей Гессе.
Она составлена из частных производных второго порядка, вычисленных в стационарной точке
Как показано в разд.4.4.1, при помощи поворота системы координат вокруг оси можно квадратичную форму в правой части (4.76) привести к каноническому виду
(4.77)
где — собственные значения матрицы Гессе
.
В зависимости от знаков собственных значений возможны следующие случаи:
1) если собственные значения одного знака, то поверхность (4.77) представляет собой эллиптический параболоид: выпуклый при
(рис.4.58,а), или вогнутый при
(рис.4.58,б);
2) если собственные значения имеют разные знаки, то поверхность (4.77) представляет собой гиперболический параболоид (рис.4.58,в при
);
3) если одно из собственных значений равно нулю (например, при ), то поверхность (4.77) представляет собой параболический цилиндр: выпуклый при
(рис.4.58,2) или вогнутый при
(рис.4.58,д).
В случае эллиптического параболоида стационарная точка является либо точкой локального минимума функции при
, либо точкой локального максимума функции при
. В случае гиперболического параболоида (
и
имеют разные знаки) в стационарной точке
нет экстремума. В случае выпуклого параболического цилиндра можно сказать, что точка
не может быть точкой максимума, но может быть точкой минимума, в случае вогнутого параболического цилиндра точка
не может быть точкой минимума, но может быть точкой максимума. Таким образом, если хотя бы одно собственное значение равно нулю, судить о наличии экстремума в точке
нельзя, так как нужны дополнительные исследования, учитывающие в формуле Тейлора члены выше второго порядка.
Алгоритм исследования функции на локальный экстремум
1. Составить и решить систему (4.74) — найти стационарные точки . Если система не имеет решения, то точек локального экстремума нет.
2. Составить матрицу Гессе и найти ее собственные значения
и
, решая характеристическое уравнение
3. Проверить выполнение следующих условий.
а) Если
, то
— точка локального минимума.
б) Если
, то
— точка локального максимума.
в) Если
, то
может быть точкой локального минимума (требуется дополнительное исследование).
г) Если
, то
может быть точкой локального максимума (требуется дополнительное исследование).
д) Если и
разных знаков
, то
не является точкой локального экстремума.
Пример 4.25. Найти экстремумы функции .
Решение.. Решая систему уравнений
находим стационарные точки и
.
Составляем матрицу Гессе .
В стационарной точке матрица Гессе
. Найдем собственные значения матрицы Гессе. Характеристическое уравнение
имеет корни разных знаков. Следовательно, точка
не является точкой экстремума (см. п.3,»д» алгоритма).
В стационарной точке матрица Гессе
. Характеристическое уравнение
имеет два положительных корня . Следовательно, точка
является точкой минимума (см. п.3,»а» алгоритма).
Применение графических методов поиска экстремума функции
Рассмотрим постановку задачи поиска условного экстремума функции трех переменных. Пусть заданы:
а) функция трех переменных
;
б) множество допустимых решений .
Требуется найти такую точку из множества допустимых решений, которой соответствует минимальное значение функции
на этом множестве:
Алгоритм графического метода поиска условного (или безусловного экстремума) функции аналогичен алгоритму, рассмотренному ранее для функции двух переменных. Однако его применение на практике ограничивается возможностями изображения пространственных фигур. Как правило, используется плоское изображение пространственных фигур, т.е. проекции этих фигур на плоскость, что не дает полного представления о взаимном их расположении.
Ниже рассматриваются задачи, в которых минимизируемая функция и функции, задающие ограничения, являются многочленами трех переменных первой или второй степени. Построение множества допустимых решений и поверхностей уровня функции сводится к построению алгебраических поверхностей первого или второго порядков. В этих задачах применение графического метода упрощается.
Напомним, что поверхностью уровня функции называется геометрическое место точек пространства, в которых функция принимает постоянное значение, т.е.
.
Если функция является многочленом первой степени, то ее поверхности уровня
при разных значениях постоянной
представляют собой семейство параллельных плоскостей (несобственный пучок плоскостей).
Если функция является многочленом второй степени, то ее поверхности уровня
при разных значениях постоянной
представляют собой поверхности второго порядка. Поскольку уравнения разных поверхностей уровня отличаются только свободными членами, то собственные векторы, собственные значения
, а также инварианты
остаются постоянными для всех поверхностей уровня
. Следовательно, тип поверхности и канонический базис остаются постоянными для всех поверхностей уровня квадратичной функции.
Пример 4.26. Графическим методом найти экстремумы:
Решение.
1) 1. Множество допустимых решений строить не нужно, так как оно совпадает со всем пространством:
.
2. Поверхность уровня при
представляет собой эллипсоид (рис.4.59,а), при
— мнимый конус с единственной вещественной точкой
, при
— мнимый эллипсоид. При увеличении постоянной
полуоси эллипсоида пропорционально увеличиваются. На рис.4.59,а изображены эллипсоиды
и
Стрелками указаны направления наискорейшего возрастания функции.
3. Из пункта 2 следует, что допустимые значения функции определяются не равенством .
4. В точке достигается безусловный минимум функции, так как в этой точке функция принимает наименьшее значение по сравнению со значениями в других точках пространства, а наибольшего значения функция не достигает.
2) Решается задача поиска условного экстремума с ограничениями типа равенств и неравенств.
1. Строим множество допустимых решений — часть плоскости
в первом октанте, т.е. плоский треугольник с вершинами
(рис.4.59,б).
2. Поверхности уровня функции
представляют собой семейство параллельных плоскостей, каждая из которых перпендикулярна оси аппликат. На рис.4.59,б изображены три плоскости уровня
. При
или
плоскость
не имеет общих точек с треугольником
; при
плоскость
имеет общие точки с треугольником
, в частности, при
плоскости
принадлежит сторона
треугольника, при
плоскости
принадлежит вершина
треугольника.
3. Из пункта 2 следует, что допустимые значения функции определяются неравенством .
4. Наименьшее значение на множестве , равное нулю, функция достигает в любой точке отрезка
; наибольшее значение на множестве
, равное единице, функция достигает в точке
.
3) Решается задача поиска условного экстремума с ограничением типа равенств.
1. Строим множество допустимых решений — сфера
единичного радиуса с центром в начале координат (рис.4.60).
2. Поверхности уровня представляют собой либо однополостный гиперболоид вращения при
(например, однополостный гиперболоид
(рис.4.60,а)), либо круговой конус
при
(рис.4.60,б), либо двуполостный гиперболоид вращения при
(например, двуполостный гиперболоид
(рис.4.60,в)). При
поперечные полуоси однополостного гиперболоида
больше единицы, и он не имеет общих точек со сферой единичного радиуса. При
продольная полуось двуполостного гиперболоида
больше единицы, и он не имеет общих точек со сферой
. При
поверхность уровня
имеет общие точки с заданной сферой.
3. Из п.2 следует, что допустимые значения функции определяются неравенством .
4. Наименьшее значение на множестве , равное –1, функция достигает в точках
— вершинах двуполостного гиперболоида
(рис.4.60,в); наибольшее значение на множестве
, равное единице, функция достигает в точках окружности
т.е. в точках горлового эллипса (в данном случае окружности) однополостного гиперболоида вращения
(рис.4.60,а).
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.
Содержание:
Функции нескольких переменных:
Многим явлениям, в том числе экономическим, присуща многофакторная зависимость. Исследование таких зависимостей потребовало совершенствования математического аппарата, в частности введения понятия функции нескольких переменных.
Определение. Пусть имеется 
Например, формула  задает объем цилиндра
задает объем цилиндра  как функцию двух переменных:
как функцию двух переменных:  (радиуса основания) и
(радиуса основания) и  (высоты).
(высоты).
Переменные  называются независимыми переменными или аргументами,
называются независимыми переменными или аргументами,  — зависимой переменной, а символ
— зависимой переменной, а символ  означает закон соответствия. Множество
означает закон соответствия. Множество  называется областью определения функции. Очевидно, это подмножество
называется областью определения функции. Очевидно, это подмножество  -мерного пространства.
-мерного пространства.
Пример:
Найти область определения функции:

Решение:
а)Область определения задается условием:  или
или  т.е. представляет собой единичный круг с центром в начале координат.
т.е. представляет собой единичный круг с центром в начале координат.
б) Имеем  т.е. область определения — это плоскость
т.е. область определения — это плоскость  за исключением координатных прямых
за исключением координатных прямых  и
и 
Рассмотрим некоторые примеры функций нескольких переменных.
1. Функция  где
где  — постоянные числа, называется линейной. Ее можно рассматривать как сумму
— постоянные числа, называется линейной. Ее можно рассматривать как сумму  линейных функций от переменных
линейных функций от переменных 
2.Функция ,
, — постоянные числа) называется квадратической. В отличие от предыдущего примера квадратическая функция не является сепарабельной, т.е. не раскладывается в сумму функций одной переменной.
— постоянные числа) называется квадратической. В отличие от предыдущего примера квадратическая функция не является сепарабельной, т.е. не раскладывается в сумму функций одной переменной.
3. В § 5.6 была определена функция полезности — одно из базовых понятий экономической теории. Многомерный ее аналог — это функция  выражающая полезность от п приобретенных товаров. Чаще всего встречаются следующие ее виды:
выражающая полезность от п приобретенных товаров. Чаще всего встречаются следующие ее виды:
 — логарифмическая функция;
— логарифмическая функция;
 Здесь
Здесь 
Такая функция называется функцией постоянной эластичности.
Также на случай  переменных обобщается понятие производственной функции (см. § 5.6), выражающей результат производственной деятельности от обусловивших его факторов
переменных обобщается понятие производственной функции (см. § 5.6), выражающей результат производственной деятельности от обусловивших его факторов  Приведем здесь наиболее часто встречающиеся виды производственных функций (
Приведем здесь наиболее часто встречающиеся виды производственных функций ( —величина общественного продукта,
—величина общественного продукта,  — затраты труда,
— затраты труда,  — объем производственных фондов), полагая для простоты
— объем производственных фондов), полагая для простоты 
а) функция Кобба—Дугласа
б) функция с постоянной эластичностью замещения:
 В настоящей главе мы будем вести изложение в основном для функций двух переменных
В настоящей главе мы будем вести изложение в основном для функций двух переменных  при этом практически все понятия и теоремы, сформулированные для
при этом практически все понятия и теоремы, сформулированные для  легко переносятся и на случай
легко переносятся и на случай  Однако рассмотрение случая двух переменных позволяет использовать наглядную геометрическую иллюстрацию основных понятий настоящей главы.
Однако рассмотрение случая двух переменных позволяет использовать наглядную геометрическую иллюстрацию основных понятий настоящей главы.
Функцию двух переменных будем обозначать в дальнейшем  Тогда ее область определения
Тогда ее область определения  есть подмножество координатной плоскости
есть подмножество координатной плоскости 
Окрестностью точки  называется круг, содержащий точку
называется круг, содержащий точку  (см. рис. 15.1).
(см. рис. 15.1).
Очевидно, круг на плоскости есть двумерный аналог интервала на прямой.
При изучении функций нескольких переменных во многом используется уже разработанный в предыдущих главах математический аппарат. А именно: любой функции можно поставить в соответствие пару функций одной переменной: при фиксированном значении
можно поставить в соответствие пару функций одной переменной: при фиксированном значении  функцию
функцию и при фиксированном значении
и при фиксированном значении  функцию
функцию 
Следует иметь в виду, что хотя функции  и имеют одно и то же «происхождение», вид их может существенно различаться. Рассмотрим, например, функцию
и имеют одно и то же «происхождение», вид их может существенно различаться. Рассмотрим, например, функцию  , выражающую величину вклада через
, выражающую величину вклада через  лет при ставке
лет при ставке  . Очевидно, что это функция степенная по
. Очевидно, что это функция степенная по  и показательная по .
и показательная по .
Графиком функции двух переменных называется множество точек трехмерного пространства  аппликата
аппликата  которых связана с абсциссой и ординатой у функциональным соотношением .
которых связана с абсциссой и ординатой у функциональным соотношением .
График функции двух переменных , вообще говоря, представляет собой некоторую поверхность в трехмерном пространстве.
Для построения графика функции полезно рассматривать функции одной переменной  представляющие сечения графика плоскостями, параллельными координатным плоскостям
представляющие сечения графика плоскостями, параллельными координатным плоскостям  т.е. плоскостями
т.е. плоскостями
Пример:
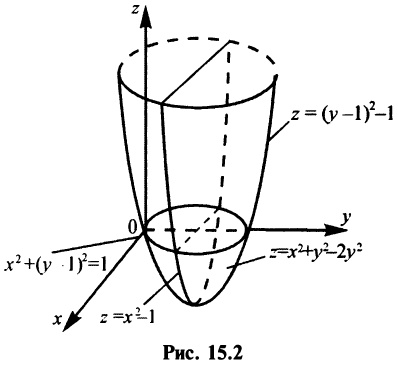
Построить график функции 
Решение:
Сечения поверхности 
 плоскостями, параллельными координатным плоскостям
плоскостями, параллельными координатным плоскостям  представляют параболы (например, при
представляют параболы (например, при 

 и т.д.). В сечении поверхности координатной плоскостью
и т.д.). В сечении поверхности координатной плоскостью  получается окружность
получается окружность 
 График функции представляет поверхность, называемую параболоидом (см. рис. 15.2). ►
График функции представляет поверхность, называемую параболоидом (см. рис. 15.2). ►
Как видно, график функции двух переменных — значительно более сложный объект, чем график функции одной переменной. Как правило, построение поверхности оказывается довольно трудной задачей. В то же время поверхность в пространстве обладает гораздо меньшей наглядностью, чем линия на плоскости. Поэтому в случае двух переменных для изучения поведения функции желательно использовать другие, более наглядные инструменты. Важнейшим из них являются линии уровня.
Определение. Линией уровня функции двух переменных называется множество точек на плоскости, таких, что во всех этих точках значение функции одно и то же и равно  . Число
. Число  в этом случае называется уровнем.
в этом случае называется уровнем.
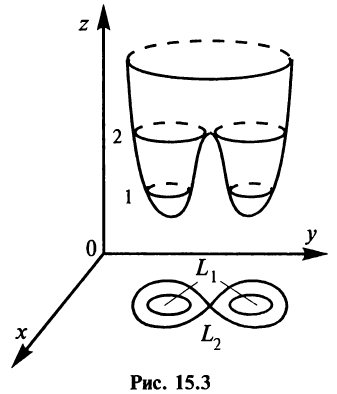
На рис. 15.3 изображены линии уровня, соответствующие значениям  Как видно, линия уровня
Как видно, линия уровня  состоит из двух непересекающихся кривых. Линия
состоит из двух непересекающихся кривых. Линия  — самопересекающаяся кривая.
— самопересекающаяся кривая.
Многие примеры линий уровня хорошо известны и привычны. Например, параллели и меридианы на глобусе — это линии уровня функций широты и долготы. Синоптики публикуют карты с изображением изотерм — линий уровня температуры. В § 15.10 мы рассмотрим примеры использования линий уровня функций нескольких переменных в экономическом анализе. Построение линий уровня оказывается существенно более легкой задачей, чем построение графиков самих функций.
Пример:
Построить линии уровня функции 
Решение:
Линия уровня  — это кривая на плоскости
— это кривая на плоскости  задаваемая уравнением
задаваемая уравнением  Это уравнение окружности с центром в точке
Это уравнение окружности с центром в точке  и радиусом
и радиусом  (рис. 15.4).
(рис. 15.4). 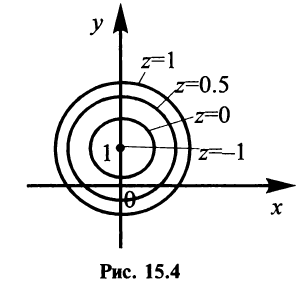
Точка —это вырожденная линия уровня, соответствующая минимальному значению функции
—это вырожденная линия уровня, соответствующая минимальному значению функции  достигаемому в точке . Линии уровня — концентрические окружности, радиус которых увеличивается с ростом
достигаемому в точке . Линии уровня — концентрические окружности, радиус которых увеличивается с ростом  ,причем расстояния между линиями с одинаковым шагом уровня уменьшаются по мере удаления от центра. Линии уровня позволяют представить график данной функции, который бы ранее построен на рис. 15.2. ►
,причем расстояния между линиями с одинаковым шагом уровня уменьшаются по мере удаления от центра. Линии уровня позволяют представить график данной функции, который бы ранее построен на рис. 15.2. ►
Предел и непрерывность
Большая часть понятий математического анализа, определенных ранее для функций одной переменной, может быть перенесена на случай двух переменных.
Определение. Число  называется пределом функции
называется пределом функции 
 (или
(или  ), если для любого даже сколь угодно малого положительного числа
), если для любого даже сколь угодно малого положительного числа  найдется положительное число
найдется положительное число  (зависящее от
(зависящее от  ), такое, что для всех точек
), такое, что для всех точек  , отстоящих от точки
, отстоящих от точки  на расстояние
на расстояние  меньшее, чем
меньшее, чем  (т.е. при
(т.е. при  ), выполняется неравенство
), выполняется неравенство 
Обозначается предел так:
Пример:
Найти предел
Решение:
Обозначим  Условие
Условие  равносильно тому, что
равносильно тому, что  Запишем предел в виде
Запишем предел в виде 
Как правило, вычисление пределов функций двух переменных оказывается существенно более трудной задачей по сравнению со случаем одной переменной. Причина заключается в том, что на прямой существуют всего два направления, по которым аргумент может стремиться к предельной точке — а именно, справа и слева (см. § 6.2). На плоскости же таких направлений — бесконечное множество, и пределы функции по разным направлениям могут не совпадать.
Пример:
Доказать, что  не существует.
не существует.
Решение:
Будем приближаться к точке  по прямым
по прямым 
Если 
Получили, что значение предела зависит от углового коэффициента прямой. Но так как предел функции не должен зависеть от способа приближения точки  к точке
к точке  (например, по прямой
(например, по прямой  ), то рассматриваемый предел не существует. ►
), то рассматриваемый предел не существует. ►
Определение. Функция  называется непрерывной в точке
называется непрерывной в точке  если она: 1) определена в точке
если она: 1) определена в точке  2) имеет конечный предел при
2) имеет конечный предел при  3) этот предел равен значению функции в точке
3) этот предел равен значению функции в точке 
Геометрический смысл непрерывности очевиден: график в точке  представляет собой сплошную, нерасслаивающуюся поверхность.
представляет собой сплошную, нерасслаивающуюся поверхность.
Частные производные
Дадим аргументу  приращение
приращение  , аргументу
, аргументу  — приращение
— приращение  Тогда функция
Тогда функция  получит наращенное значение
получит наращенное значение  Величина
Величина  называется полным приращением функции в точке
называется полным приращением функции в точке  Если задать только приращение аргумента
Если задать только приращение аргумента  или только приращение аргумента
или только приращение аргумента  , то полученные приращения функции соответственно
, то полученные приращения функции соответственно  называются частными.
называются частными.
Полное приращение функции, вообще говоря, не равно сумме частных, т.е.

Пример:
Найти частные и полное приращения функции 
Решение:



Получили, что
Определение. Частной производной функции нескольких переменных по одной из этих переменных называется предел отношения соответствующего частного приращения функции к приращению рассматриваемой независимой переменной при стремлении последнего к нулю (если этот предел существует).
Обозначается частная производная так:  или
или  или
или 


Таким образом, для функции  по определению
по определению
Геометрический смысл частных производных функции в точке  показан на рис. 15.5.
показан на рис. 15.5.
Пусть график функции представляет некоторую поверхность  Тогда при
Тогда при  мы получаем кривую
мы получаем кривую  — сечение этой поверхности соответствующей плоскостью.
— сечение этой поверхности соответствующей плоскостью.
В этом случае производная  выражает угловой коэффициент касательной к кривой , в заданной точке
выражает угловой коэффициент касательной к кривой , в заданной точке  т.е.
т.е.  где
где  угол наклона касательной к оси
угол наклона касательной к оси  Аналогично
Аналогично
Из определения частных производных (15.1), (15.2) следует, что для нахождения производной  надо считать постоянной переменную
надо считать постоянной переменную  , а для нахождения
, а для нахождения  — переменную
— переменную  . При этом сохраняются известные из гл. 7 правила дифференцирования.
. При этом сохраняются известные из гл. 7 правила дифференцирования.
Пример:
Найти частные производные функций:

Решение:
а) Чтобы найти частную производную по , считаем постоянной величиной. Таким образом, 
 Аналогично, дифференцируя по , считаем постоянной величиной, т.е.
Аналогично, дифференцируя по , считаем постоянной величиной, т.е.
б) При фиксированном у имеем степенную функцию от . Таким образом,  При фиксированном функция является показательной относительно
При фиксированном функция является показательной относительно 
Пример:
Поток пассажиров  выражается функцией
выражается функцией , где
, где  — число жителей,
— число жителей,  — расстояние между городами. Найти частные производные и пояснить их смысл.
— расстояние между городами. Найти частные производные и пояснить их смысл.
Решение:
Производная  показывает, что при одном и том же расстоянии между городами увеличение потока пассажиров пропорционально удвоенному числу жителей. Производная
показывает, что при одном и том же расстоянии между городами увеличение потока пассажиров пропорционально удвоенному числу жителей. Производная  показывает, что при одной и той же численности жителей увеличение потока пассажиров обратно пропорционально квадрату расстояния между городами. ►
показывает, что при одной и той же численности жителей увеличение потока пассажиров обратно пропорционально квадрату расстояния между городами. ►
Дифференциал функции
Дифференциал функции  определялся как главная, линейная относительно
определялся как главная, линейная относительно  , часть приращения функции, равная произведению
, часть приращения функции, равная произведению 
Обобщая определение дифференциала функции на случай двух независимых переменных, приходим к следующему определению.
Определение. Дифференциалом функции называется сумма произведений частных производных этой функции на приращения соответствующих независимых переменных, т.е.

Учитывая, что для функций  согласно (15.3)
согласно (15.3)  формулу дифференциала (15.3) можно записать в виде
формулу дифференциала (15.3) можно записать в виде

или
Определение. Функция  называется дифференцируемой в точке
называется дифференцируемой в точке  , если ее полное приращение может быть представлено в виде
, если ее полное приращение может быть представлено в виде

где  — дифференциал функции,
— дифференциал функции,  — бесконечно малые при
— бесконечно малые при 
Таким образом, дифференциал функции двух переменных, как и в случае одной переменной, представляет главную, линейную относительно приращений  часть полного приращения функции.
часть полного приращения функции.
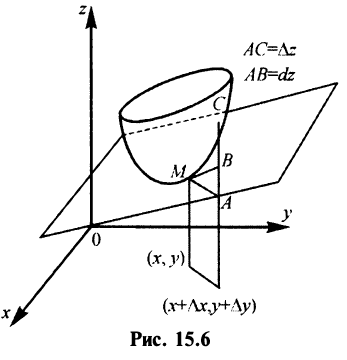
Можно показать, что если полное приращение функции  представляет геометрически приращение аппликаты поверхности
представляет геометрически приращение аппликаты поверхности  , то дифференциал функции
, то дифференциал функции  есть приращение аппликаты касательной плоскости к поверхности в данной точке, когда переменные
есть приращение аппликаты касательной плоскости к поверхности в данной точке, когда переменные  получают приращения
получают приращения  (см. рис. 15.6).
(см. рис. 15.6).
Следует отметить, что для функции одной переменной  существование конечной производной
существование конечной производной  и представление приращения функции в виде (9.1), т.е.
и представление приращения функции в виде (9.1), т.е.  , являются равнозначными утверждениями, и любое из них могло быть взято за определение дифференцируемости функции.
, являются равнозначными утверждениями, и любое из них могло быть взято за определение дифференцируемости функции.
Для функции нескольких переменных дело обстоит иначе: существование частных производных является лишь необходимым, но недостаточным условием дифференцируемости функции.
Следующая теорема выражает достаточное условие дифференцируемости функции двух переменных.
Теорема. Если частные производные функции  существуют в окрестности точки
существуют в окрестности точки  и непрерывны в самой точке
и непрерывны в самой точке  , то функция
, то функция  дифференцируема в этой точке.
дифференцируема в этой точке.
Производная по направлению. Градиент
Пусть функция определена в некоторой окрестности точки  — некоторое направление, задаваемое единичным вектором
— некоторое направление, задаваемое единичным вектором , где
, где  ибо
ибо  (или
(или  );
);  — косинусы углов, образуемых вектором
— косинусы углов, образуемых вектором  с осями координат и называемые направляющими косинусами.
с осями координат и называемые направляющими косинусами.
При перемещении в данном направлении  точки
точки  в точку
в точку  функция
функция  получит приращение
получит приращение 
 называемое приращением функции в данном направлении (рис. 15.7).
называемое приращением функции в данном направлении (рис. 15.7).
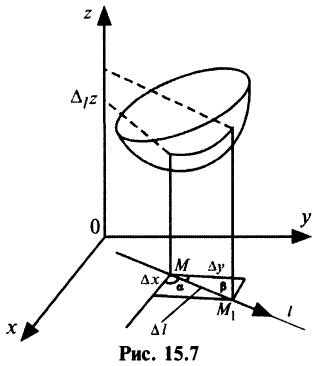
Если  , то, очевидно,
, то, очевидно,  следовательно,
следовательно, 

Определение. Производной  по направлению функции двух переменных
по направлению функции двух переменных  называется предел отношения приращения функции в этом направлении к величине перемещения
называется предел отношения приращения функции в этом направлении к величине перемещения  при стремлении последней к нулю, т.е.
при стремлении последней к нулю, т.е.

Производная  характеризует скорость изменения функции в направлении .
характеризует скорость изменения функции в направлении .
Очевидно, что рассмотренные ранее частные производные  и
и  представляют производные по направлениям, параллельным соответственно осям
представляют производные по направлениям, параллельным соответственно осям 
Нетрудно показать, что

Рассмотрим понятие градиента функции 
Определение. Градиентом  функции
функции  называется вектор с координатами
называется вектор с координатами 
Рассмотрим скалярное произведение (см. § 3.1) вектора  и единичного вектора
и единичного вектора  Получим
Получим

Сравнивая равенства (15.7) и (15.8), получим, что  т.е. производная по направлению есть скалярное произведение градиента
т.е. производная по направлению есть скалярное произведение градиента  и единичного вектора, задающего направление .
и единичного вектора, задающего направление .
Известно (см. § 3.1), что скалярное произведение двух векторов максимально, если они одинаково направлены. Следовательно, градиент функции в данной точке характеризует направление максимальной скорости изменения функции в этой точке.
Зная градиент функции в каждой точке, можно по крайней мере локально строить линии уровня функции. А именно, имеет место теорема.
Теорема. Пусть задана дифференцируемая функция  и пусть в точке
и пусть в точке  величина градиента отлична от нуля. Тогда градиент перпендикулярен линии уровня, проходящей через данную точку.
величина градиента отлична от нуля. Тогда градиент перпендикулярен линии уровня, проходящей через данную точку.
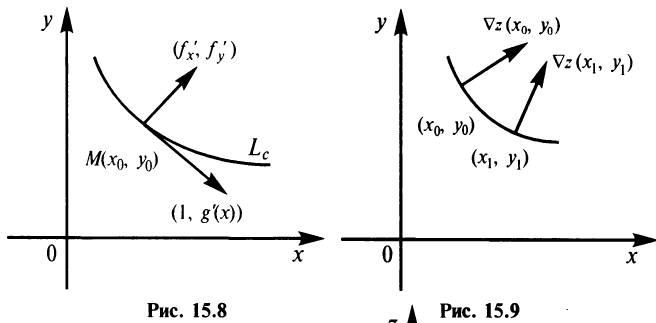
 Линия уровня
Линия уровня  задается уравнением
задается уравнением  где
где  ). Предположим, что это уравнение можно разрешить относительно
). Предположим, что это уравнение можно разрешить относительно  , т.е.
, т.е.  на (если это невозможно, то следует разрешить уравнение относительно х и повторить все рассуждения с точностью до обозначений).
на (если это невозможно, то следует разрешить уравнение относительно х и повторить все рассуждения с точностью до обозначений).
Таким образом, касательный вектор имеет координаты  Умножив его компоненты на получим, что вектор
Умножив его компоненты на получим, что вектор  касателен к линии уровня (см. рис. 15.8).
касателен к линии уровня (см. рис. 15.8).
Между тем на линии уровня  т.е.
т.е.  откуда
откуда  на . Но
на . Но  — скалярное произведение вектора градиента
— скалярное произведение вектора градиента и вектора
и вектора  касательного к , т.е. рассматриваемые векторы перпендикулярны. ■
касательного к , т.е. рассматриваемые векторы перпендикулярны. ■
Таким образом, линии уровня можно построить следующим образом (см. рис. 15.9). Предположим, мы начинаем с точки  Построим градиент в этой точке. Задаем направление, перпендикулярное градиенту. Оно позволяет построить малую часть линии уровня. Далее рассмотрим близкую точку
Построим градиент в этой точке. Задаем направление, перпендикулярное градиенту. Оно позволяет построить малую часть линии уровня. Далее рассмотрим близкую точку  и построим градиент в ней.
и построим градиент в ней.
Продолжая этот процесс, можно (с определенной погрешностью) построить линии уровня.
Экстремум функции нескольких переменных
Как и в случае одной переменной, функция 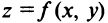 имеет узловые, определяющие структуру графика точки. В первую очередь это точки экстремума.
имеет узловые, определяющие структуру графика точки. В первую очередь это точки экстремума.
Определение. Точка  называется точкой максимума (минимума) функции
называется точкой максимума (минимума) функции  если существует окрестность точки
если существует окрестность точки  , такая, что для всех точек
, такая, что для всех точек  из этой окрестности выполняется неравенство
из этой окрестности выполняется неравенство
 ,
,
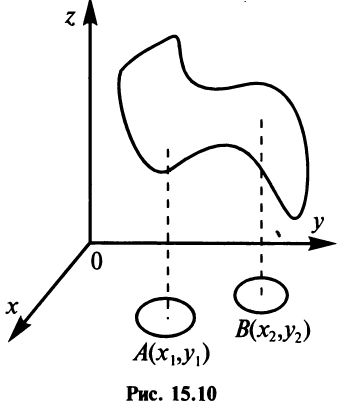
На рис.15.10 точка  — есть точка минимума, а точка
— есть точка минимума, а точка  — точка максимума.
— точка максимума.
Обращаем внимание на локальный характер экстремума (максимума и минимума) функции, так как речь идет о максимальном и минимальном значении лишь в достаточно малой окрестности точки 
Сформулируем необходимое условие экстремума — многомерный аналог теоремы Ферма.
Теорема. Пусть точка  — есть точка экстремума дифференцируемой функции
— есть точка экстремума дифференцируемой функции  Тогда частные производные
Тогда частные производные  в этой точке равны нулю.
в этой точке равны нулю.
Пусть точка  — точка максимума. Зафиксируем одну из переменных, например
— точка максимума. Зафиксируем одну из переменных, например  , полагая
, полагая  . Тогда получим функцию одной переменной
. Тогда получим функцию одной переменной  которая, очевидно, будет иметь максимум при
которая, очевидно, будет иметь максимум при . Согласно теореме Ферма
. Согласно теореме Ферма  Аналогично можно доказать, что и
Аналогично можно доказать, что и 
Точки, в которых выполнены необходимые условия экстремума функции  т.е. частные производные
т.е. частные производные  равны нулю, называются критическими или стационарными.
равны нулю, называются критическими или стационарными.
Необходимое условие экстремума можно переформулировать также следующим образом: в точке минимума или максимума дифференцируемой функции градиент равен нулю. Можно доказать и более общее утверждение — в точке экстремума обращаются в нуль производные функции по всем направлениям.
Равенство частных производных нулю выражает лишь необходимое, но недостаточное условие экстремума функции нескольких переменных.
На рис. 15.11 изображена так называемая седловая точка  Частные производные
Частные производные равны нулю, но, очевидно, никакого экстремума в точке
равны нулю, но, очевидно, никакого экстремума в точке  нет.
нет.
Такие седловые точки являются двумерными аналогами точек перегиба функций одной переменной. Задача заключается в том, чтобы отделить их от точек экстремума. Иными словами, требуется знать достаточное условие экстремума.
Прежде чем это сделать, введем понятия частных производных второго порядка.
Если частные производные  сами являются дифференцируемыми функциями, то можно найти также и их частные производные, которые называются частными производными второго порядка.
сами являются дифференцируемыми функциями, то можно найти также и их частные производные, которые называются частными производными второго порядка.
Вычислив частные производные функции  получим
получим  Аналогично можно определить две частные производные функции
Аналогично можно определить две частные производные функции  которые обозначаются
которые обозначаются

Можно доказать, что если частные производные второго порядка функции  непрерывны в точке
непрерывны в точке то в этой точке
то в этой точке

Теперь мы можем сформулировать достаточное условие экстремума.
Теорема (достаточное условие экстремума функции двух переменных). Пусть функция  а) определена в некоторой окрестности критической точки
а) определена в некоторой окрестности критической точки  в которой
в которой 
б) имеет в этой точке непрерывные частные производные второго порядка 
 Тогда, если
Тогда, если  то в точке
то в точке  функция
функция  имеет экстремум, причем если
имеет экстремум, причем если  — максимум, если
— максимум, если  — минимум. В случае
— минимум. В случае  функция
функция  экстремума не имеет. Если
экстремума не имеет. Если  то вопрос о наличии экстремума остается открытым.
то вопрос о наличии экстремума остается открытым.
Исследование функции двух переменных на экстремум рекомендуется проводить по следующей схеме:
- Найти частные производные функции
 .
. - Решить систему уравнений и найти критические точки функции.
- Найти частные производные второго порядка, вычислить их значения в каждой критической точке и с помощью достаточного условия сделать вывод о наличии экстремумов.
- Найти экстремумы (экстремальные значения) функции.
 .
. и найти критические точки функции.
и найти критические точки функции.Пример:
Найти экстремумы функции
Решение:
1°. Находим частные производные
2°. Критические точки функции находим из системы уравнений:
имеющей четыре решения 
3°. Находим частные производные второго порядка:
 вычисляем их значения в каждой критической точке и проверяем в ней выполнение достаточного условия экстремума.
вычисляем их значения в каждой критической точке и проверяем в ней выполнение достаточного условия экстремума.
Например, в точке  Так как
Так как  то точка
то точка  есть точка максимума.
есть точка максимума.
Аналогично устанавливаем, что  — точка минимума, а в точках
— точка минимума, а в точках  в которых
в которых  — экстремума нет. Эти точки являются седловыми.
— экстремума нет. Эти точки являются седловыми.
4°. Находим экстремумы функции 

Наибольшее и наименьшее значения функции
При нахождении наибольшего и наименьшего значений (т.е. глобального максимума и минимума) функции нескольких переменных, непрерывной на некотором замкнутом множестве, следует иметь в виду, что эти значения достигаются или в точках экстремума, или на границе множества.
Пример №1
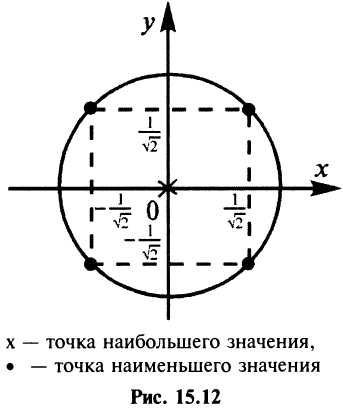
Найти наибольшее и наименьшее значения функции  на круге радиуса 1 с центром в начале координат.
на круге радиуса 1 с центром в начале координат.
Решение:
1. Найдем частные производные функции

2. Найдем критические точки функции из системы 
 откуда
откуда  т.е. имеется одна критическая точка
т.е. имеется одна критическая точка 
3. Найдем критические точки функции на границе области — окружности, задаваемой уравнением  Подставляя
Подставляя  в функцию
в функцию  получим функцию одной переменной
получим функцию одной переменной
 причем
причем 
Найдя производную  и приравнивая ее к нулю, получим критические точки на границе области:
и приравнивая ее к нулю, получим критические точки на границе области: 
4. Найдем значения функции  в критических точках внутри области
в критических точках внутри области  и на ее границе
и на ее границе  а также на концах отрезка [
а также на концах отрезка [ на границе области
на границе области 
 и выбираем среди них наибольшее меньшее. Итак,
и выбираем среди них наибольшее меньшее. Итак,  и
и
В заключение параграфа рассмотрим класс выпуклых функций, для которых задача нахождения экстремальных значений существенно упрощается.
Определим сначала множества, на которых задается этот класс функций.
Определение. Подмножество D  -мерного пространства называется выпуклым, если для любых двух точек
-мерного пространства называется выпуклым, если для любых двух точек  принадлежащих D, отрезок, соединяющий эти точки, также целиком принадлежит D.
принадлежащих D, отрезок, соединяющий эти точки, также целиком принадлежит D.
Например, множества, изображенные на рис. 15.13а, — выпуклые, а множество на рис. 15.13б— невыпуклое.  Простыми и наиболее естественными примерами выпуклых множеств являются само пространство, а также его положительный сектор, заданный условиями
Простыми и наиболее естественными примерами выпуклых множеств являются само пространство, а также его положительный сектор, заданный условиями 
Определение. Функция  заданная на выпуклом множестве D, называется выпуклой вниз, если для любых двух точек
заданная на выпуклом множестве D, называется выпуклой вниз, если для любых двух точек 

и выпуклой вверх, если
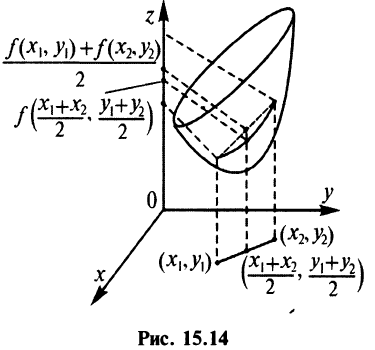
График функции, выпуклой вниз, изображен на рис. 15.14.
Очевидно, выпуклая функция не может иметь седловых точек, подобных изображенной на рис. 15.11. Это значит, что для выпуклой функции равенство ее частных производных нулю является не только необходимым, но и достаточным условием экстремума. Более того, экстремум выпуклой функции является глобальным, т.е. наименьшим значением в случае функции, выпуклой вниз, и наибольшим — в случае функции, выпуклой вверх.
Задача нахождения максимумов и минимумов функций многих переменных значительно сложнее аналогичной задачи для функций одной переменной. Даже в самых простых случаях чисто технические проблемы могут вызвать значительные трудности. Задаче нахождения подобных экстремумов посвящен специальный раздел математики — вариационное исчисление. В последние десятилетия бурное развитие переживает комплексная научная дисциплина — исследование операций, посвященная поиску оптимальных решений в различных, в том числе и экономических, задачах, в которых исследуемая (целевая) функция нескольких переменных принимает наибольшее или наименьшее значение.
Условный экстремум. Метод множителей Лагранжа
Рассмотрим задачу, специфическую для функций нескольких переменных, когда ее экстремум ищется не на всей области определения, а на множестве, удовлетворяющем некоторому условию.
Пусть рассматривается функция  аргументы
аргументы  которой удовлетворяют условию
которой удовлетворяют условию  называемому уравнением связи.
называемому уравнением связи.
Определение. Точка  называется точкой условного максимума (минимума), если существует такая окрестность этой точки, что для всех точек
называется точкой условного максимума (минимума), если существует такая окрестность этой точки, что для всех точек  из этой окрестности, удовлетворяющих условию
из этой окрестности, удовлетворяющих условию  выполняется неравенство
выполняется неравенство

На рис. 15.15 изображена точка условного максимума . Очевидно, что она не является точкой безусловного экстремума функции  (на рис. 15.15 это точка (
(на рис. 15.15 это точка ( ).
).
Наиболее простым способом нахождения условного экстремума функции двух переменных является сведение задачи к отысканию экстремума функции одной переменной. Допустим уравнение связи  удалось разрешить относительно одной из переменных, например выразить
удалось разрешить относительно одной из переменных, например выразить  :
:  . Подставив полученное выражение в функцию двух переменных, получим
. Подставив полученное выражение в функцию двух переменных, получим  , т.е. функцию одной переменной. Ее экстремум и будет условным экстремумом функции .
, т.е. функцию одной переменной. Ее экстремум и будет условным экстремумом функции .
Пример №2
Найти точки максимума и минимума функции  при условии
при условии 
Решение:
Выразим из уравнения  переменную
переменную  через переменную
через переменную  и подставим полученное выражение
и подставим полученное выражение  в функцию
в функцию  . Получим
. Получим  или
или  . Эта функция имеет единственный минимум при
. Эта функция имеет единственный минимум при  Соответствующее значение функции
Соответствующее значение функции  Таким образом,
Таким образом,  — точка условного экстремума (минимума). ►
— точка условного экстремума (минимума). ►
В рассмотренном примере уравнение связи  оказалось линейным, поэтому его легко удалось разрешить относительно одной из переменных. Однако в более сложных случаях сделать это не удается.
оказалось линейным, поэтому его легко удалось разрешить относительно одной из переменных. Однако в более сложных случаях сделать это не удается.
Для отыскания условного экстремума в общем случае используется метод множителей Лагранжа.
Рассмотрим функцию трех переменных 

Эта функция называется функцией Лагранжа, а  — множителем Лагранжа. Верна следующая теорема.
— множителем Лагранжа. Верна следующая теорема.
Теорема. Если точка  является точкой условного экстремума функции
является точкой условного экстремума функции  при условии
при условии  то существует значение
то существует значение  такое, что точка
такое, что точка  является точкой экстремума функции
является точкой экстремума функции 
Таким образом, для нахождения условного экстремума функции при условии требуется найти решение системы
Последнее из этих уравнений совпадает с уравнением связи. Первые два уравнения системы можно переписать в виде

т.е. в точке условного экстремума градиенты функций  и
и  коллинеарны.
коллинеарны.
На рис. 15.16 показан геометрический смысл условий Лагран-жа. Линия пунктирная, линии уровня  функции
функции  сплошные.
сплошные.
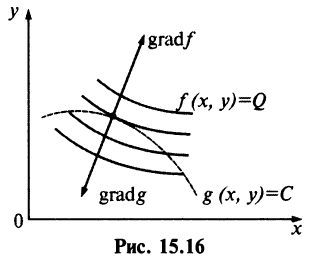
Из рис. 15.16 следует, что в точке условного экстремума линия уровня функции  касается линии
касается линии
Пример №3
Найти точки экстремума функции  -при условии
-при условии  используя метод множителей Лагранжа.
используя метод множителей Лагранжа.
Решение:
Составляем функцию Лагранжа  . Приравнивая к нулю ее частные производные, получим систему уравнений
. Приравнивая к нулю ее частные производные, получим систему уравнений
Ее единственное решение Таким образом, точкой условного экстремума может быть только точка (3; 1). Нетрудно убедиться в том, что в этой точке функция
Таким образом, точкой условного экстремума может быть только точка (3; 1). Нетрудно убедиться в том, что в этой точке функция  имеет условный минимум. ►
имеет условный минимум. ►
В случае, если число переменных более двух, может рассматриваться и несколько уравнений связи. Соответственно в этом случае будет и несколько множителей Лагранжа.
Мы не рассматриваем здесь достаточные условия условного экстремума. Отметим только, что во многих задачах критическая точка функции Лагранжа оказывается единственной и соответствует не только локальному, но и глобальному условному минимуму или максимуму.
Задача нахождения условного экстремума используется при решении таких экономических задач, как нахождение оптимального распределения ресурсов, выбор оптимального портфеля ценных бумаг и др. (подробнее см. § 15.11).
Понятие об эмпирических формулах
Метод наименьших квадратов:
На практике мы часто сталкиваемся с задачей о сглаживании экспериментальных зависимостей.
Пусть зависимость между двумя переменными  выражается в виде таблицы, полученной опытным путем. Это могут быть результаты опыта или наблюдений, статистической обработки материала и т.п.
выражается в виде таблицы, полученной опытным путем. Это могут быть результаты опыта или наблюдений, статистической обработки материала и т.п.

Требуется наилучшим образом сгладить экспериментальную зависимость между переменными , т.е. по возможности точно отразить общую тенденцию зависимости  от
от  , исключив при этом случайные отклонения, связанные с неизбежными погрешностями измерений или статистических наблюдений. Такую сглаженную зависимость стремятся представить в виде формулы
, исключив при этом случайные отклонения, связанные с неизбежными погрешностями измерений или статистических наблюдений. Такую сглаженную зависимость стремятся представить в виде формулы  .
.
Формулы, служащие для аналитического представления опытных данных, получили название эмпирических формул.
Задача нахождения эмпирических формул разбивается на два этапа. На первом этапе нужно установить вид зависимости  т.е. решить, является ли она линейной, квадратичной, логарифмической или какой-либо другой.
т.е. решить, является ли она линейной, квадратичной, логарифмической или какой-либо другой.
Предположим, например, что результаты экспериментальных исследований нанесены на плоскость (паре чисел  соответствует точка с такими же координатами). Разумеется, существует множество кривых, проходящих через эти точки (см. рис. 15.17).
соответствует точка с такими же координатами). Разумеется, существует множество кривых, проходящих через эти точки (см. рис. 15.17).
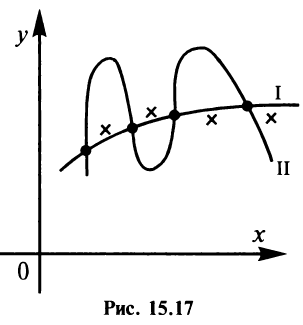
Для продвижения к цели обычно предполагают, что кривая истинной зависимости — это наиболее «гладкая» кривая, согласованная с эмпирическими данными. Так, в случае, изображенном на рис. 15.17, исследователь несомненно предпочтет кривую I кривой II.
Для проверки правильности вывода проводятся дополнительные исследования, т.е. производится еще ряд одновременных измерений величин  Дополнительные точки наносятся на плоскость. Если они оказываются достаточно близкими к выбранной кривой (на рис. 15.17 дополнительные точки изображены крестиками), то можно считать, что вид кривой установлен. В противном случае кривую надо скорректировать и вновь провести дополнительные измерения.
Дополнительные точки наносятся на плоскость. Если они оказываются достаточно близкими к выбранной кривой (на рис. 15.17 дополнительные точки изображены крестиками), то можно считать, что вид кривой установлен. В противном случае кривую надо скорректировать и вновь провести дополнительные измерения.
Кроме того, для выбора функции  привлекаются дополнительные соображения, как правило, не математического характера (теоретические предпосылки, опыт предшествующих исследований и т.п.).
привлекаются дополнительные соображения, как правило, не математического характера (теоретические предпосылки, опыт предшествующих исследований и т.п.).
Предположим, первый этап завершен — вид функции  установлен. Тогда переходят ко второму этапу — определению неизвестных параметров этой функции.
установлен. Тогда переходят ко второму этапу — определению неизвестных параметров этой функции.
Согласно наиболее распространенному и теоретически обоснованному методу наименьших квадратов в качестве неизвестных параметров функции  выбирают такие значения, чтобы сумма квадратов невязок
выбирают такие значения, чтобы сумма квадратов невязок  , или отклонений «теоретических» значений
, или отклонений «теоретических» значений  найденных по эмпирической формуле
найденных по эмпирической формуле  , от соответствующих опытных значений
, от соответствующих опытных значений  т.е.
т.е.

была минимальной (рис. 15.18).
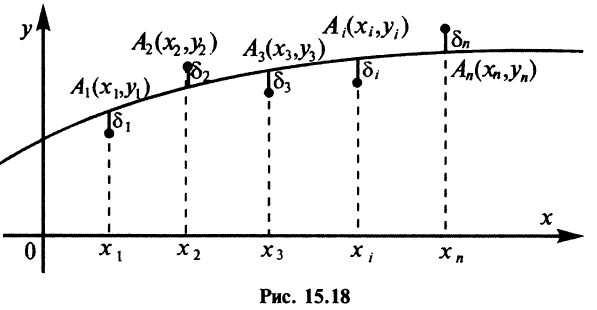
Следует отметить, что в качестве величины отклонения  эмпирических точек
эмпирических точек  от точек сглаживающей экспериментальную зависимость кривой
от точек сглаживающей экспериментальную зависимость кривой  в принципе можно было взять обычную сумму невязок
в принципе можно было взять обычную сумму невязок  или сумму их абсолютных величин
или сумму их абсолютных величин
 Но делать это нецелесообразно, так как в первом случае
Но делать это нецелесообразно, так как в первом случае  может быть малой или даже равняться нулю при значительном разбросе эмпирических точек, так как положительные отклонения
может быть малой или даже равняться нулю при значительном разбросе эмпирических точек, так как положительные отклонения  , компенсируются отрицательными.
, компенсируются отрицательными.
Во втором случае функция  лишена этого недостатка,но имеет другой — она не является дифференцируемой, что существенно затрудняет решение задачи.
лишена этого недостатка,но имеет другой — она не является дифференцируемой, что существенно затрудняет решение задачи.
Пусть в качестве функции  взята линейная функция
взята линейная функция  и задача сводится к отысканию таких значений параметров а и Ь, при которых функция (15.9)
и задача сводится к отысканию таких значений параметров а и Ь, при которых функция (15.9)
принимает наименьшее значение. Заметим, что функция  есть функция двух переменных
есть функция двух переменных  до тех пор, пока мы не нашли, а затем зафиксировали их «наилучшие» (в смысле метода наименьших квадратов) значения, а
до тех пор, пока мы не нашли, а затем зафиксировали их «наилучшие» (в смысле метода наименьших квадратов) значения, а  — постоянные числа, найденные экспериментально.
— постоянные числа, найденные экспериментально.
Таким образом, для нахождения прямой, наилучшим образом согласованной с опытными данными, достаточно решить систему
После алгебраических преобразований эта система принимает вид:
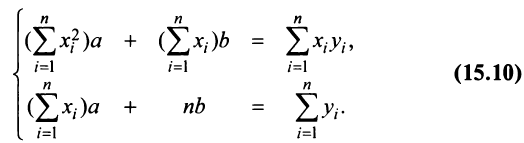
Система (15.10) называется системой нормальных уравнений.
Эта система имеет единственное решение, так как ее определитель
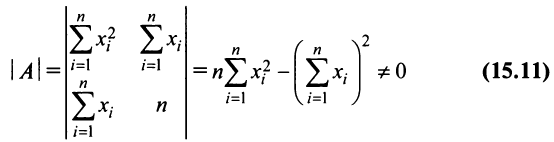
(а точнее  что можно доказать методом математической индукции при
что можно доказать методом математической индукции при  ).
).
Убедимся, что найденные из системы (15.10) значения дают минимум функции  Найдем частные производные
Найдем частные производные

Выражение  в силу изложенного выше и
в силу изложенного выше и  следовательно, согласно достаточному условию функция имеет единственную точку минимума, определяемую из системы нормальных уравнений (15.10). Заметим, что в этой точке функция
следовательно, согласно достаточному условию функция имеет единственную точку минимума, определяемую из системы нормальных уравнений (15.10). Заметим, что в этой точке функция  имеет не просто локальный минимум, но наименьшее значение (глобальный минимум).
имеет не просто локальный минимум, но наименьшее значение (глобальный минимум).
Пример:
Имеются следующие данные о цене на нефть  (ден. ед.) и индексе акций нефтяных компаний
(ден. ед.) и индексе акций нефтяных компаний  (усл. ед.).
(усл. ед.).

Предполагая, что между переменными  существует линейная зависимость, найти эмпирическую формулу вида
существует линейная зависимость, найти эмпирическую формулу вида  используя метод наименьших квадратов.
используя метод наименьших квадратов.
Решение:
Найдем необходимые для расчетов суммы
 Промежуточные вычисления оформим в виде вспомогательной таблицы.
Промежуточные вычисления оформим в виде вспомогательной таблицы. 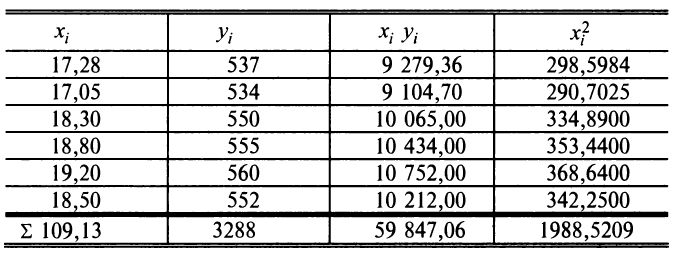
Система нормальных уравнений (15.10) имеет вид

Ее решение  дает искомую зависимость:
дает искомую зависимость:  Таким образом, с увеличением цены нефти на 1 ден. ед. индекс акций нефтяных компаний в среднем растет на 12,08 ед. ►
Таким образом, с увеличением цены нефти на 1 ден. ед. индекс акций нефтяных компаний в среднем растет на 12,08 ед. ►
Понятие двойного интеграла
В настоящем параграфе мы затронем некоторые вопросы, связанные с интегрированием функций нескольких переменных. В отличие от случая одной переменной здесь не удается ввести простого понятия первообразной и неопределенного интеграла. В то же время определенный интеграл вводится аналогично: интегрирование рассматривается как «суммирование бесконечного числа бесконечно малых величин».
Вначале определим двумерный аналог интегральной суммы (см. § 11.1).
Пусть рассматривается множество  на плоскости
на плоскости  (для простоты будем считать его выпуклым). Построим покрывающую это множество решетку (см. рис. 15.19).
(для простоты будем считать его выпуклым). Построим покрывающую это множество решетку (см. рис. 15.19).
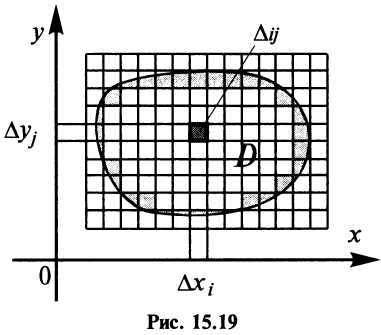
На рис. 15.19 штриховкой обозначена часть множества , не покрытая полными клетками решетки. Очевидно, площадь этой части уменьшается по мере того, как увеличивается число клеток разбиения, т.е. уменьшаются размеры клеток (опять же для простоты будем считать, что все клетки имеют одинаковые размеры). Занумеруем клетки решетки индексами
 , где
, где — номер клетки по горизонтали (считая слева направо), a
— номер клетки по горизонтали (считая слева направо), a  — номер клетки по вертикали (считая снизу вверх). Пусть
— номер клетки по вертикали (считая снизу вверх). Пусть  соответственно длина горизонтальной и вертикальной стороны клетки
соответственно длина горизонтальной и вертикальной стороны клетки  . Тогда при
. Тогда при  площадь заштрихованной части множества стремится к нулю и, несколько пренебрегая строгостью, можно сделать утверждение:
площадь заштрихованной части множества стремится к нулю и, несколько пренебрегая строгостью, можно сделать утверждение:  — это часть множества покрытая целыми клетками решетки.
— это часть множества покрытая целыми клетками решетки.
В каждой клетке  выберем произвольную точку
выберем произвольную точку  Интегральной суммой функции
Интегральной суммой функции  на множестве называется сумма
на множестве называется сумма 
Обозначим через  — диаметр клетки, т.е. наибольший линейный размер ее (в данном случае
— диаметр клетки, т.е. наибольший линейный размер ее (в данном случае  — длина диагонали клетки).
— длина диагонали клетки).
Определение. Функция  называется интегрируемой на множестве , если существует конечный предел
называется интегрируемой на множестве , если существует конечный предел  интегральной суммы этой функции на при условии
интегральной суммы этой функции на при условии  Само значение предела называется двойным интегралом функции на множестве .
Само значение предела называется двойным интегралом функции на множестве .
Обозначается двойной интеграл следующим образом:
Замечание. Указанный предел интегральной суммы не должен зависеть ни от способа разбиения множества на элементарные ячейки (лишь для простоты в качестве таких ячеек мы использовали прямоугольные клетки), ни от выбора точек  в каждой ячейке.
в каждой ячейке.
Таким образом, по определению

Отметим геометрический смысл двойного интеграла. Если функция  непрерывна и неотрицательна в области , то двойной интеграл
непрерывна и неотрицательна в области , то двойной интеграл  представляет собой объем прямого цилиндрического тела (цилиндроида), построенного на области как на основании и ограниченного сверху поверхностью
представляет собой объем прямого цилиндрического тела (цилиндроида), построенного на области как на основании и ограниченного сверху поверхностью  Если
Если  для всех
для всех  то
то  численно равен площади области .
численно равен площади области .
Интегрирование функции двух переменных значительно более трудная задача по сравнению с аналогичной задачей для одной переменной. Однако в некоторых случаях можно получить завершенный результат. Рассмотрим один из таких важнейших случаев.
Множество  на плоскости
на плоскости  называется элементарным относительно оси
называется элементарным относительно оси  если его граница состоит из графиков двух непрерывных функций
если его граница состоит из графиков двух непрерывных функций  определенных на некотором отрезке
определенных на некотором отрезке  и таких, что
и таких, что  и из отрезков прямых
и из отрезков прямых  и
и  (рис. 15.20).
(рис. 15.20).
Двойной интеграл может быть вычислен с помощью теоремы, представляющей двумерный аналог формулы Ньютона—Лейбница.
Теорема. Если функция  непрерывна на элементарном множестве
непрерывна на элементарном множестве  , то
, то
 Интеграл, стоящий в правой части формулы (15.12), называется повторным интегралом и обычно записывается в виде
Интеграл, стоящий в правой части формулы (15.12), называется повторным интегралом и обычно записывается в виде
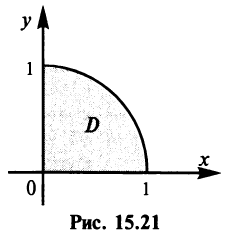
Пример №4
Вычислить интеграл  , где — круговой сектор, изображенный на рис. 15.21.
, где — круговой сектор, изображенный на рис. 15.21.
Решение:
Множество является элементарным. Здесь
 Таким образом, искомый интеграл принимает вид:
Таким образом, искомый интеграл принимает вид: 

Двойные и повторные интегралы находят свое применение в теории вероятностей, вариационном исчислении и многих других разделах математики, имеющих непосредственные экономические приложения.
Функции нескольких переменных в экономической теории
Рассмотрим некоторые приложения функций нескольких переменных в экономической теории.
Значительная часть экономических механизмов иллюстрируется на рисунках, изображающих линии уровня функции двух переменных  Например, линии уровня производственной функции называются изоквантами.
Например, линии уровня производственной функции называются изоквантами.
Пусть  — два различных фактора производства, а функция
— два различных фактора производства, а функция  характеризует выпуск продукции, который позволяют значения факторов
характеризует выпуск продукции, который позволяют значения факторов  . На рис.15.22 линии уровня
. На рис.15.22 линии уровня  изображены сплошными линиями, а штриховкой выделена так называемая экономическая область, которая характеризуется тем, что высекаемые ею части изо-квант представляют собой графики убывающих функций, т.е. увеличение количества одного фактора позволяет уменьшить количество другого, не меняя размера выпуска. Иными словами, экономическая область — это множество значений факторов, допускающих замещение одного из них другим. Очевидно, что все «разумные» значения принадлежат экономической области.
изображены сплошными линиями, а штриховкой выделена так называемая экономическая область, которая характеризуется тем, что высекаемые ею части изо-квант представляют собой графики убывающих функций, т.е. увеличение количества одного фактора позволяет уменьшить количество другого, не меняя размера выпуска. Иными словами, экономическая область — это множество значений факторов, допускающих замещение одного из них другим. Очевидно, что все «разумные» значения принадлежат экономической области.
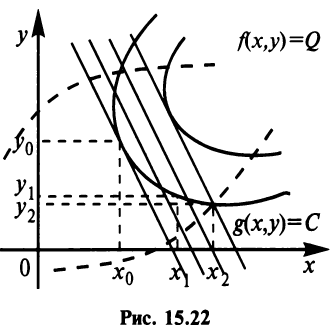
Изокванты позволяют геометрически иллюстрировать решение задачи об оптимальном распределении ресурсов. Пусть  — функция издержек, характеризующая затраты, необходимые для обеспечения значений ресурсов
— функция издержек, характеризующая затраты, необходимые для обеспечения значений ресурсов  (часто можно считать, что функция издержек линейная:
(часто можно считать, что функция издержек линейная:  — «цены» факторов ).
— «цены» факторов ).
Линии уровня этой функции также изображены на рис. 15.20. Комбинации линий уровня функции  позволяют делать выводы о предпочтительности того или иного значения факторов . Очевидно, например, что пара значений
позволяют делать выводы о предпочтительности того или иного значения факторов . Очевидно, например, что пара значений  более предпочтительна, чем пара
более предпочтительна, чем пара  , так как обеспечивает тот же выпуск, но с меньшими затратами. Оптимальными же значениями факторов будут значения
, так как обеспечивает тот же выпуск, но с меньшими затратами. Оптимальными же значениями факторов будут значения  — координаты точки касания линии уровня функции выпуска и функции издержек.
— координаты точки касания линии уровня функции выпуска и функции издержек.
Линии уровня функции полезности (они называются кривыми безразличия) (см. § 5.6) также позволяют рассматривать вопросы замещения одного товара другим и иллюстрировать решение задачи об оптимальном потреблении (потребительского выбора) (см. рис. 15.23).
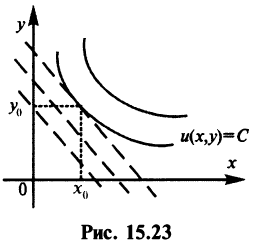
Линия уровня затрат на приобретение товаров  изображены на рис. 15.23 пунктиром. Оптимальное потребление обеспечивается значениями
изображены на рис. 15.23 пунктиром. Оптимальное потребление обеспечивается значениями  — координатами точки касания кривой безразличия и линии уровня затрат. В этой точке заданная полезность достигается наиболее экономичным образом.
— координатами точки касания кривой безразличия и линии уровня затрат. В этой точке заданная полезность достигается наиболее экономичным образом.
Другой пример кривых безразличия возникает в теории инвестиций.
Портфель ценных бумаг (под портфелем мы здесь будем понимать совокупность определенных ценных бумаг в определенных количествах) характеризуется двумя основными параметрами — ожидаемой доходностью  и риском
и риском  (точное определение этих величин здесь не может быть приведено, так как оно использует понятия теории вероятностей и математической статистики). Каждому портфелю можно поставить в соответствие точку на координатной плоскости
(точное определение этих величин здесь не может быть приведено, так как оно использует понятия теории вероятностей и математической статистики). Каждому портфелю можно поставить в соответствие точку на координатной плоскости  , и тогда множество всех возможных портфелей представляет некоторую область
, и тогда множество всех возможных портфелей представляет некоторую область  (см. рис. 15.24).
(см. рис. 15.24).
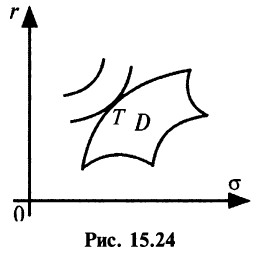
Очевидно, что при равных доход-ностях инвестор предпочтет портфель с меньшим риском. Таким образом, кривые безразличия — линии уровня функции предпочтения  — выпуклы вниз. Точка
— выпуклы вниз. Точка  в которой линия безразличия касается области
в которой линия безразличия касается области  , соответствует наиболее предпочтительному для данного инвестора портфелю. Соответствующая теория была предложена американским экономистом Харри Марковицем в 1952 г. и с тех пор получила широкое развитие в теории инвестиций.
, соответствует наиболее предпочтительному для данного инвестора портфелю. Соответствующая теория была предложена американским экономистом Харри Марковицем в 1952 г. и с тех пор получила широкое развитие в теории инвестиций.
Понятие частной производной также находит применение в экономической теории. В § 7.6 было введено понятие эластичности функции одной переменной  . Аналогично можно ввести понятие частной эластичности функции нескольких переменных
. Аналогично можно ввести понятие частной эластичности функции нескольких переменных  относительно переменной
относительно переменной  :
:  Так, например, в производственной функции Кобба—Дугласа (см. § 15.1)
Так, например, в производственной функции Кобба—Дугласа (см. § 15.1)  , как нетрудно убедиться,
, как нетрудно убедиться, , т.е. показатели
, т.е. показатели  приближенно показывают, на сколько процентов изменится выпуск продукции при изменении только затрат труда
приближенно показывают, на сколько процентов изменится выпуск продукции при изменении только затрат труда  или только объема производственных фондов
или только объема производственных фондов  на 1%.
на 1%.
Рассмотрим частные производные  — функции полезности. Они называются предельными полезностями и обозначаются
— функции полезности. Они называются предельными полезностями и обозначаются  .Если измерять количество товара в стоимостном выражении, то предельные полезности можно рассматривать как функции спроса на соответствующий товар. Найдем предельные полезности для функции постоянной эластичности
.Если измерять количество товара в стоимостном выражении, то предельные полезности можно рассматривать как функции спроса на соответствующий товар. Найдем предельные полезности для функции постоянной эластичности

Имеем  т.е. функции спроса с ростом стоимости каждого товара являются убывающими, а параметры
т.е. функции спроса с ростом стоимости каждого товара являются убывающими, а параметры  представляют частные эластичности спроса на эти товары.
представляют частные эластичности спроса на эти товары.
Если рассматривать спрос  как функцию нескольких переменных, например двух — цены товара
как функцию нескольких переменных, например двух — цены товара  и доходов потребителей
и доходов потребителей  то можно говорить о частных эластичностях спроса от цены
то можно говорить о частных эластичностях спроса от цены  и спроса от доходов
и спроса от доходов 
 Например, можно установить, что
Например, можно установить, что  для качественных товаров и
для качественных товаров и  для низкосортных, так как с ростом доходов спрос на качественные товары увеличивается, а на низкосортные — уменьшается.
для низкосортных, так как с ростом доходов спрос на качественные товары увеличивается, а на низкосортные — уменьшается.
Если при исследовании спроса на данный товар рассматривать влияние другого, альтернативного товара ценой  , т.е. рассматривать спрос как функцию трех переменных
, т.е. рассматривать спрос как функцию трех переменных  то можно ввести перекрестный коэффициент эластичности спроса, определяемый по формуле
то можно ввести перекрестный коэффициент эластичности спроса, определяемый по формуле  показывающий приближенно процентное изменение спроса на данный товар при изменении цены альтернативного товара на 1%. Очевидно, что для взаимозаменяемых товаров
показывающий приближенно процентное изменение спроса на данный товар при изменении цены альтернативного товара на 1%. Очевидно, что для взаимозаменяемых товаров  так как увеличение цены одного товара приводит к увеличению спроса на другой. В то же время для взаимодополняющих товаров
так как увеличение цены одного товара приводит к увеличению спроса на другой. В то же время для взаимодополняющих товаров  ибо в этом случае рост цены любого товара приводит к снижению спроса.
ибо в этом случае рост цены любого товара приводит к снижению спроса.
Рассмотрим еще один коэффициент эластичности, характеризующий производственную функцию нескольких переменных и имеющий важное значение для экономической теории.
Пусть  — производственная функция и
— производственная функция и 
 — предельные продукты, соответствующие затратам ресурсов
— предельные продукты, соответствующие затратам ресурсов  . Коэффициентом эластичности замещения называется величина
. Коэффициентом эластичности замещения называется величина
Так как при малых приращениях аргумента  имеет место приближенное равенство
имеет место приближенное равенство  приращение логарифма переменной величины можно рассматривать как относительное приращение самой величины. Таким образом, величина, обратная коэффициенту эластичности замещения, показывает приближенно, на сколько процентов изменится отношение предельных продуктов
приращение логарифма переменной величины можно рассматривать как относительное приращение самой величины. Таким образом, величина, обратная коэффициенту эластичности замещения, показывает приближенно, на сколько процентов изменится отношение предельных продуктов  при изменении отношения затрат ресурсов
при изменении отношения затрат ресурсов  на 1%.
на 1%.
В § 15.1 приведена производственная функция с постоянной эластичностью замещения. В общем случае коэффициент эластичности замещения есть функция от двух переменных. Рассмотрим ее выражение в точках изокванты. Так как вдоль изокванты значение функции  постоянно, то полный дифференциал этой функции
постоянно, то полный дифференциал этой функции  вдоль изокванты равен нулю, т.е.
вдоль изокванты равен нулю, т.е.  Отсюда имеем
Отсюда имеем  , т.е. при сохранении объема выпуска
, т.е. при сохранении объема выпуска  величина
величина  называемая предельной нормой замещения ресурса
называемая предельной нормой замещения ресурса  ресурсом
ресурсом  , равна отношению их предельных продуктов. С учетом последнего равенства можно записать, что
, равна отношению их предельных продуктов. С учетом последнего равенства можно записать, что 
Очевидно, что  — тангенс угла
— тангенс угла  наклона касательной к изокванте в точке
наклона касательной к изокванте в точке  — тангенс угла наклона радиуса-вектора
— тангенс угла наклона радиуса-вектора  точки
точки  (см. рис. 15.25).
(см. рис. 15.25).
Таким образом, величина  характеризует относительное изменение угла наклона касательной к изокванте при изменении угла наклона ее радиуса вектора, т.е. кривизну изокванты.
характеризует относительное изменение угла наклона касательной к изокванте при изменении угла наклона ее радиуса вектора, т.е. кривизну изокванты.
Если рассматривать как функцию
как функцию  есть коэффициент эластичности в обычном смысле (см. § 7.6).
есть коэффициент эластичности в обычном смысле (см. § 7.6).
Понятие выпуклости функции также играет существенную роль в понимании важнейших экономических законов. Многомерные аналоги примеров, рассмотренных в § 8.10, позволяют математически сформулировать законы убывающей доходности и убывающей предельной полезности.
Пример:
Определить оптимальное распределение ресурсов для функции выпуска  , если затраты на факторы
, если затраты на факторы  — линейны и задаются ценами
— линейны и задаются ценами 
Решение:
В точке  , задающей оптимальное распределение ресурсов , линия уровня функции издержек
, задающей оптимальное распределение ресурсов , линия уровня функции издержек касается изокванты
касается изокванты  (см. § 15.11). На экономической области изокванта есть часть графика функции
(см. § 15.11). На экономической области изокванта есть часть графика функции  . Линия уровня функции издержек — это прямые
. Линия уровня функции издержек — это прямые  угловой коэффициент которых
угловой коэффициент которых 
Таким образом, условие касания имеет вид  и соответственно
и соответственно  .
.
Таким образом, факторы  следует распределить в отношении
следует распределить в отношении 
Пример:
Результаты десяти одновременных измерений величин  сведены в следующую таблицу:
сведены в следующую таблицу:

Предполагая, что зависимость величины  от величины
от величины  имеет вид
имеет вид  , найти значения параметров
, найти значения параметров  этой зависимости, используя метод наименьших квадратов.
этой зависимости, используя метод наименьших квадратов.
Решение:
Величина  , определенная равенством (15.10), имеет вид
, определенная равенством (15.10), имеет вид
Имеем 
Приравнивая частные производные  к нулю, критические точки функции
к нулю, критические точки функции  определяем как решение системы нормальных уравнений:
определяем как решение системы нормальных уравнений:
Вычислив при  необходимые суммы
необходимые суммы 

получим систему нормальных уравнений в виде:
откуда 
Определение функции от нескольких переменных
Во многих вопросах геометрии, естествознания и т. д. приходится иметь дело с функциями двух, трех переменных и более. Приведем примеры.
Пример:
Площадь треугольника U = ху/2 с основанием х и высотой у есть функция от двух переменных х и у, определенная в области х > 0 и у > 0.
Пример:
Разрешая уравнение сферы  относительно, при
относительно, при  получим
получим 
Здесь аппликата z точки верхней полусферы есть функция двух переменных х и у — абсциссы и ординаты этой точки. Данная функция определена в круге 
Пример:
Объем прямоугольного параллелепипеда V = xyz с измерениями х, у и z есть функция этих трех переменных, определенная в положительном октанте пространства Oxyz.
Пример:
Сила притяжения F двух материальных точек, имеющих массы т и т, и занимающих соответственно положения М(х, у, z) и  согласно закону Ньютона, равна
согласно закону Ньютона, равна

где k — некоторая константа (гравитационная постоянная). Следовательно, F есть функция от шести переменных 
Сделаем одно важное замечание: всякая ‘ функция от нескольких переменных становится функцией от меньшего числа переменных, если часть переменных зафиксировать, т.е. придать постоянные значения.
Например, пусть мы имеем функцию

от трех переменных  . Если положить, что z сохраняет постоянное значение z = с, то мы получим функцию от двух переменных х и у:
. Если положить, что z сохраняет постоянное значение z = с, то мы получим функцию от двух переменных х и у:

Далее, предполагая, что две переменные у и z сохраняют неизменные значения у = b и z = с, получим функцию  от одной переменной х.
от одной переменной х.
Таким образом, в разных вопросах, по желанию, функцию и можно рассматривать как функцию одной, двух или трех переменных.
Строго говоря, почти всякая физическая зависимость дает нам пример функции весьма большого количества переменных. Но при изучении этой зависимости мы игнорируем часть несущественных факторов и тем самым ограничиваем число переменных, сводя его к минимуму.
Например, путь s, пройденный свободно падающим телом за время t, зависит от следующих переменных: t — времени падения, Q — площади поперечного сечения тела,  — широты места, h — высоты места над уровнем моря, р — давления воздуха, Т — температуры воздуха
— широты места, h — высоты места над уровнем моря, р — давления воздуха, Т — температуры воздуха  — коэффициента вязкости воздуха и т. д. Так что мы должны написать
— коэффициента вязкости воздуха и т. д. Так что мы должны написать

В первом приближении все переменные, кроме времени t, являются малосущественными. Игнорируя их, получим s = f(t) и тем самым приходим к известной формуле

где  — ускорение свободного падения, которое считается постоянным.
— ускорение свободного падения, которое считается постоянным.
Если хотя бы частично учесть роль других переменных, то мы будем иметь формулы для s все более и более соответственно точные, зависящие от все более возрастающего числа переменных.
Геометрическим изображением (графиком) функции двух переменных

является, вообще говоря, поверхность в пространстве Oxyz.
В самом деле, пусть данная функция определена в некоторой области со плоскости Оху. Тогда каждой паре значений х и у из области (О соответствует по формуле (1) некоторое значение z; иными словами, каждой точке N(x, у, 0)  ставится в соответствие точка М(х, у, z), принадлежащая графику функции и являющаяся концом перпендикуляра NM к плоскости Оху.
ставится в соответствие точка М(х, у, z), принадлежащая графику функции и являющаяся концом перпендикуляра NM к плоскости Оху.
Если точка N занимает всевозможные положения, исчерпывающие область со, то связанная с ней точка М, в общем случае, опишет в пространстве некоторую поверхность Р «нависающую» над областью со. Наглядно можно представлять себе, что Р есть «крыша», построенная над площадкой  . Поверхность Р и является геометрическим изображением функции (1) (рис. 208). Геометрические изображения функций трех и большего числа переменных не имеют простого геометрического смысла.
. Поверхность Р и является геометрическим изображением функции (1) (рис. 208). Геометрические изображения функций трех и большего числа переменных не имеют простого геометрического смысла.
В некоторых случаях можно получить наглядное геометрическое представление о характере изменения функции, рассматривая ее линии уровня (или поверхности уровня), т.е. линии (или поверхности), где данная функция сохраняет постоянное значение.
Определение: Линией уровня функции
называется множество всех точек плоскости Охуу для которых данная функция имеет одно и то же значение (изокривая).
Таким образом, уравнение линии уровня есть
где С — некоторая постоянная.
Пример:
Построить семейство линий уровня функции  Давая z неотрицательные значения
Давая z неотрицательные значения  (z, очевидно, не может быть отрицательным), получим соответственно уравнения линий уровня функции:
(z, очевидно, не может быть отрицательным), получим соответственно уравнения линий уровня функции:  — точка О(0, 0);
— точка О(0, 0);  — окружность радиуса R = 1 с центром О(0, 0);
— окружность радиуса R = 1 с центром О(0, 0);  — окружность радиуса
— окружность радиуса  с центром О(0, 0) и т. д.
с центром О(0, 0) и т. д.
Таким образом, линии уровня нашей функции представляют собой семейство концентрических окружностей с центром О. Построив эти линии, получим «карту поверхности» для данной функции с отмеченными высотами (рис. 209).
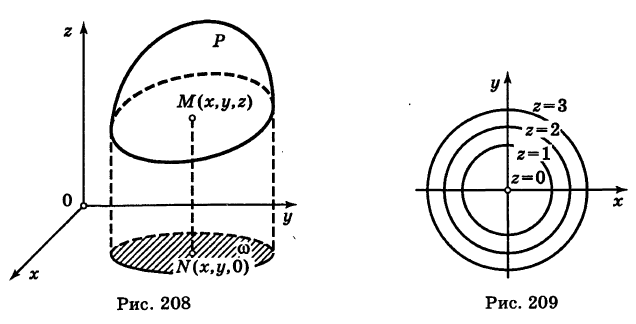
На рис. 209 мы наглядно видим, что функция z растет вдоль каждого радиального направления. Поэтому в пространстве Oxyz геометрический образ функции представляет собой гигантскую «яму» с круто растущими краями. Теоретически это параболоид вращения.
Определение: Поверхностью уровня функции

называется множество всех точек пространства Oxyz, для которых данная функция имеет одно и то же значение (и з о-поверхности).
Линии и поверхности уровня постоянно встречаются в физических вопросах. Например, соединив на карте поверхности Земли точки с одинаковой средней суточной температурой или с одинаковым средним суточным давлением, получим соответственно изотермы и изобары, являющиеся важными исходными данными для прогноза погоды.
Непрерывность
Пусть  есть функция от двух переменных х и у, совокупность значений (х, у) которых для краткости будем называть точкой; таким образом, z есть функция «точки».
есть функция от двух переменных х и у, совокупность значений (х, у) которых для краткости будем называть точкой; таким образом, z есть функция «точки».
Дадим переменной х приращение  , оставляя переменную у неизменной. Тогда разность
, оставляя переменную у неизменной. Тогда разность

называется частным приращением функции  по переменной х. Следовательно, можно написать
по переменной х. Следовательно, можно написать

Аналогично, если только переменной у дается приращение  , а переменная х остается неизменной, то разность
, а переменная х остается неизменной, то разность

называется частным приращением функции по переменной у.
Наконец, может случиться, что обе переменные х и у получили соответственно приращения  . Тогда соответствующее приращение функции
. Тогда соответствующее приращение функции

называется полным приращением функции (или просто приращением функции).
Естественно, что здесь рассматриваются лишь такие точки

для которых функция f имеет смысл, т. е. определена.
Заметим, что из формул (2), (2′) и (3) следует, что полное приращение функции, вообще говоря, не равно сумме частных приращений этой функции:

Пример №5
Найти приращение функции  , где х изменилось от 2 до 2,2 и у — от 1 до 0,9.
, где х изменилось от 2 до 2,2 и у — от 1 до 0,9.
Решение:
Здесь  = 0,2 и
= 0,2 и  = -0,1. Имеем
= -0,1. Имеем

Следовательно,

Аналогично определяются и записываются частные и полные приращения функции с числом переменных, большим двух.
Определение: Функция f(x, у) называется непрерывной в точке (х0, у0), если: 1) функция определена в данной точке и эта точка является предельной для области существования функции; 2) бесконечно малым приращениям

переменных х и у соответствует бесконечно малое приращение  функции f(x, у), т. е. при любом способе стремления приращений
функции f(x, у), т. е. при любом способе стремления приращений  к нулю, для которых
к нулю, для которых  имеет смысл, выполнено условие
имеет смысл, выполнено условие

Для наглядности можно мыслить, что функция , непрерывная в точке
, непрерывная в точке  , определена как в самой этой точке, так и в некоторой окрестности ее, причем при достаточно малых по модулю Ах0 и Д у0 имеет место равенство (4).
, определена как в самой этой точке, так и в некоторой окрестности ее, причем при достаточно малых по модулю Ах0 и Д у0 имеет место равенство (4).
Определение: Функция f(x, у) называется непрерывной в данной области у если эта функция непрерывна в каждой точке рассматриваемой области, т. е. если для каждой точки (х, у) области имеем

причем здесь мы, как обычно, предполагаем, что смещенная точка  принадлежит данной области и
принадлежит данной области и  существует (множество таких точек не пусто в любой окрестности точки {х, у) в силу определения 1). Таким образом, можно сказать, что функция непрерывна тогда и только тогда, когда бесконечно малым приращениям ее аргументов соответствует бесконечно малое приращение функции.
существует (множество таких точек не пусто в любой окрестности точки {х, у) в силу определения 1). Таким образом, можно сказать, что функция непрерывна тогда и только тогда, когда бесконечно малым приращениям ее аргументов соответствует бесконечно малое приращение функции.
Пример №6
Функция  определена и непрерывна в треугольнике:
определена и непрерывна в треугольнике:  . Заметим, что точки границы множества
. Заметим, что точки границы множества  не являются его внутренними точками.
не являются его внутренними точками.
Из формулы (5) следует, что

где а — бесконечно малая при  . Таким образом, если функция f(x, у) непрерывна, то значения ее в двух бесконечно близких точках отличаются друг от друга на бесконечно малую функцию.
. Таким образом, если функция f(x, у) непрерывна, то значения ее в двух бесконечно близких точках отличаются друг от друга на бесконечно малую функцию.
Положим  ; очевидно, при
; очевидно, при  ,
,  имеем
имеем  и обратно. Тогда из формулы (5) получаем эквивалентное определение непрерывности функции
и обратно. Тогда из формулы (5) получаем эквивалентное определение непрерывности функции
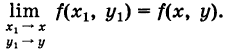
Частные производные первого порядка
Пусть дана функция
Для простоты здесь и в дальнейших параграфах по смыслу будем предполагать, что для каждой рассматриваемой точки {х, у) функция f(x, у) определена в некоторой полной окрестности этой точки.
Рассмотрим отношение частного приращения

функции z по переменной х к приращению  этой переменной
этой переменной

Предел этого отношения при , стремящемся к нулю, если таковой существует, называется частной производной {первого порядка) функции z = f(x, у) по х и обозначается так:
Мы имеем, следовательно,

Аналогично определяется частная производная  от функции х = f(x, у) по у:
от функции х = f(x, у) по у:

Определение: Частной производной функции от нескольких переменных по одной из этих переменных называется предел отношения соответствующего частного приращения функции к приращению рассматриваемой независимой переменной при условии, что последнее стремится к нулю. Заметим, что если от функции z = f(x, у) берется производная  , то у считается постоянным; если же находится
, то у считается постоянным; если же находится  , то х считается постоянным.
, то х считается постоянным.
Поэтому частная производная функции от нескольких переменных равна производной той функции одной переменной, которая получится, если все независимые переменные данной функции, кроме соответствующей одной, считать постоянными, т.е.

Следовательно, частное дифференцирование не требует никаких новых правил дифференцирования, и мы можем пользоваться известными формулами.
Пример №7
Пусть 
Легко видеть, что

Аналогично определяются и вычисляются частные производные функции  трех переменных х, у, z и т. д.
трех переменных х, у, z и т. д.
Пример №8
Пусть  ; тогда
; тогда

Для функции

нетрудно выяснить геометрическии смысл ее частных производных  . Геометрическим изображением данной функции является некоторая поверхность Р (рис. 210).
. Геометрическим изображением данной функции является некоторая поверхность Р (рис. 210).
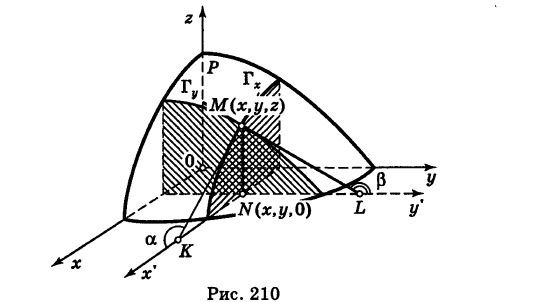
Полагая у = const, мы получаем плоскую кривую Гх, представляющую собой сечение поверхности Р соответствующей плоскостью, параллельной координатной плоскости Oxz. Пусть МК — касательная к кривой в точке М(х, у, z), а  — угол, образованный этой касательной с положительным направлением оси Ох. Так как
— угол, образованный этой касательной с положительным направлением оси Ох. Так как
на основании геометрического смысла обычной производной имеем
Аналогично, если Гу есть сечение поверхности Р плоскостью х = const и  — угол, образованный с осью Оу касательной ML в точке М{х, у, z) к кривой Гу, то
— угол, образованный с осью Оу касательной ML в точке М{х, у, z) к кривой Гу, то
Полный дифференциал функции
Пусть  есть функция от двух независимых переменных х и у. Полное приращение этой функции
есть функция от двух независимых переменных х и у. Полное приращение этой функции

представляет собой разность значений данной функции в точках М(х, у) и  . Обозначим через р расстояние между этими точками:
. Обозначим через р расстояние между этими точками:

Если при  можно подобрать не зависящие от
можно подобрать не зависящие от  величины А и В так, что выражение «
величины А и В так, что выражение «

будет отличаться от полного приращения  функции на величину высшего порядка малости по сравнению с р, то это выражение называется главной линейной частью полного приращения функции. В этом случае мы получим
функции на величину высшего порядка малости по сравнению с р, то это выражение называется главной линейной частью полного приращения функции. В этом случае мы получим

где  (или, что то же самое,
(или, что то же самое,  и
и  ).
).
Выражение (1) можно записать в другом виде. Поскольку  (рис. 211), имеем
(рис. 211), имеем

отсюда

где

при  , т. е. при
, т. е. при  и
и  и обратно.
и обратно.
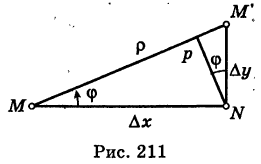
Обобщая определение дифференциала функций одной независимой переменной на случай функции двух независимых переменных, приходим к следующим определениям.
Определение: Под дифференциалом независимой переменной понимается приращение этой переменной, т. е.

Определение: Полным дифференциалом функции (или, короче, дифференциалом функции) z = f(x9 у) двух независимых переменных х и у называется главная линейная часть полного приращения этой функции.
Это определение естественным образом распространяется на функции любого числа переменных.
Обозначая дифференциал функции буквой d, можно написать

где А и Б не зависят от  и, сверх того,
и, сверх того,

где  — бесконечно малые при
— бесконечно малые при  . Функция, имеющая дифференциал в данной области, называется дифференцируемой в этой области. Если функция z дифференцируема, то для полного приращения
. Функция, имеющая дифференциал в данной области, называется дифференцируемой в этой области. Если функция z дифференцируема, то для полного приращения  функции имеет место формула (1) или(1′).
функции имеет место формула (1) или(1′).
Заметим, что если функция  дифференцируема, то эта функция непрерывна. Действительно, переходя к пределу в формуле (1′) при
дифференцируема, то эта функция непрерывна. Действительно, переходя к пределу в формуле (1′) при  , получим
, получим
т. е. функция z непрерывна.
Пример №9
Найти дифференциал функции z = ху. Функцию z можно рассматривать как площадь прямоугольника со сторонами х и у (рис. 212). Давая сторонам х и у приращения  , получим приращение
, получим приращение  площади z, представляющее собой площадь каймы:
площади z, представляющее собой площадь каймы:

Главная часть этого приращения при  , состоящая из двух прямоугольников со сторонами
, состоящая из двух прямоугольников со сторонами  есть дифференциал dz площади z; поэтому
есть дифференциал dz площади z; поэтому

ТЕОРЕМА 1. Дифференциал функции равен сумме произведений частных производных этой функции на дифференциалы соответствующих независимых переменных. .
Доказательство. Пусть функция z = f(x, у) дифференцируема, т. е. имеет дифференциал

Для определения коэффициентов А и В напишем полное приращение функции

где  — бесконечно малые при
— бесконечно малые при  . Полагая
. Полагая  = 0 в формуле (4), получим частное приращение
= 0 в формуле (4), получим частное приращение

Для наглядности мы считаем х и у положительными.
Отсюда
и, следовательно, при  будем иметь
будем иметь
Аналогично, полагая  = 0 в формуле (4), находим
= 0 в формуле (4), находим

Таким образом,
Подставляя эти значения в формулу (3) и учитывая, что  и
и  , получим окончательно
, получим окончательно

Следствие. Данная функция имеет единственный дифференциал.
Действительно, из доказательства теоремы 1 следует, что дифференциал функции  , если он существует, обязательно выражается формулой (5).
, если он существует, обязательно выражается формулой (5).
Замечание. Из формулы (5) следует, что для функции  двух независимых переменных х и у ее дифференциал dz есть функция четырех независимых переменных х, у, dx, dy, линейная (т. е. первой степени) относительно второй пары переменных. Первая пара переменных, х и у, представляет собой координаты точки М(х, у), в которой берется дифференциал; вторая пара переменных, dx и dy, есть координаты вектора смещения точки М(х, у) при переходе ее в бесконечно близкую точку М'(х + dx, у + dу), где dx и dy — проекции отрезка ММ’ на соответствующие оси координат Ох и Оу.
двух независимых переменных х и у ее дифференциал dz есть функция четырех независимых переменных х, у, dx, dy, линейная (т. е. первой степени) относительно второй пары переменных. Первая пара переменных, х и у, представляет собой координаты точки М(х, у), в которой берется дифференциал; вторая пара переменных, dx и dy, есть координаты вектора смещения точки М(х, у) при переходе ее в бесконечно близкую точку М'(х + dx, у + dу), где dx и dy — проекции отрезка ММ’ на соответствующие оси координат Ох и Оу.
Теорема (достаточное условие дифференцируемости функции). Если функция  обладает непрерывными частными производными =
обладает непрерывными частными производными = в данной области, то эта функция дифференцируема в этой области и ее дифференциал выражается формулой (5).
в данной области, то эта функция дифференцируема в этой области и ее дифференциал выражается формулой (5).
Доказательство. Рассмотрим полное приращение функции

Вычитая и прибавляя член  , будем иметь
, будем иметь

Первая квадратная скобка формулы (6) представляет собой приращение функции  по переменной х при фиксированном значении
по переменной х при фиксированном значении  второй переменной у, т.е. ее можно рассматривать как приращение функции одной переменной х. Фиксируя величину
второй переменной у, т.е. ее можно рассматривать как приращение функции одной переменной х. Фиксируя величину  и применяя теорему Лагранжа о конечном приращении функции, находим
и применяя теорему Лагранжа о конечном приращении функции, находим

где  — некоторое промежуточное значение между х и
— некоторое промежуточное значение между х и  . Аналогично, вторая квадратная скобка формулы (6) есть приращение функции по переменной у при неизменном значении переменной х. Поэтому в силу теоремы Лагранжа имеем
. Аналогично, вторая квадратная скобка формулы (6) есть приращение функции по переменной у при неизменном значении переменной х. Поэтому в силу теоремы Лагранжа имеем

где у — промежуточное значение между у и  . Из формул (6), (7) и (8) следует
. Из формул (6), (7) и (8) следует

Пусть  . Так как производные
. Так как производные  непрерывны, то значения их в бесконечно близких точках
непрерывны, то значения их в бесконечно близких точках  и соответственно
и соответственно  (рис.213) отличаются друг от друга на бесконечно малые; поэтому
(рис.213) отличаются друг от друга на бесконечно малые; поэтому
где  — бесконечно малые при
— бесконечно малые при  . Отсюда из формулы (9) имеем
. Отсюда из формулы (9) имеем

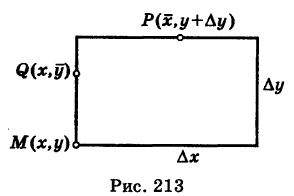
По определению главная линейная часть полного приращения  функции есть дифференциал dz этой функции. Следовательно, из формулы (10) получаем
функции есть дифференциал dz этой функции. Следовательно, из формулы (10) получаем

что и требовалось доказать.
Пример №10
Найти дифференциал функции 
Решение:
Здесь  Отсюда
Отсюда

Замечание. Аналогично, если функция  имеет непрерывные частные производные
имеет непрерывные частные производные  , то дифференциал этой функции выражается формулой
, то дифференциал этой функции выражается формулой

где 
Пример №11
Найти дифференциал функции 
Решение:
Имеем  Следовательно,
Следовательно,

При малых приращениях  приращение дифференцируемой функции
приращение дифференцируемой функции

приближенно можно заменить дифференциалом  этой функции:
этой функции:

Отсюда имеем приближенное равенство

которое будет тем относительно точнее, чем меньше  .
.
Пример №12
Дан прямоугольник со сторонами х = б м и у = 8 м. На сколько изменится диагональ этого прямоугольника, если сторона х увеличится на 5 см, а сторона у уменьшится на 10 см?
Решение:
Обозначая диагональ прямоугольника через и, имеем  . Отсюда, заменяя приращение
. Отсюда, заменяя приращение  диагонали дифференциалом du этой диагонали, приближенно находим
диагонали дифференциалом du этой диагонали, приближенно находим

Полагая в последней формуле х = б м,  = 0,05 м, у = 8 м,
= 0,05 м, у = 8 м,  = -0,10 м, получаем
= -0,10 м, получаем

Таким образом, диагональ прямоугольника уменьшится приблизительно на 5 см. Точный подсчет дает значение  = -0,045 м.
= -0,045 м.
Применение дифференциала функции к приближенным вычислениям
С помощью полного дифференциала функции можно выяснить, как отражаются на значении функции погрешности ее аргументов.
Пример №13
Определить предельную абсолютную погрешность  функции
функции
зная предельные абсолютные погрешности  аргументов х, у:
аргументов х, у:

Имеем

Заменяя приращение функции ее дифференциалом, получим

Отсюда выводим приближенную оценку:  Следовательно, за предельную абсолютную погрешность функции z можно принять
Следовательно, за предельную абсолютную погрешность функции z можно принять 
Пример №14
Гипотенуза прямоугольного треугольника х = 120 м ± 2 м, а острый угол у = 30° ± 1о. С какой точностью можно найти противолежащий данному углу катет z этого треугольника?
Решение:
Имеем

Отсюда

Полагая х = 120,  = 2 и
= 2 и  , по формулам (2) и (1) находим
, по формулам (2) и (1) находим

Следовательно,
z = 60 м ± 2,8 м.
Используя формулу (1), можно определить также предельную относительную погрешность функции:

В частности, положим

Тогда  и, следовательно,
и, следовательно,

т. е. предельная относительная погрешность произведения равна сумме предельных относительных погрешностей сомножителей.
Понятие о производной функции по данному направлению
Пусть  — функция, определенная в области со. Рассмотрим некоторую точку М(х, у)
— функция, определенная в области со. Рассмотрим некоторую точку М(х, у)  и некоторое направление
и некоторое направление  , определяемое направляющими косинусами
, определяемое направляющими косинусами  (т.е.
(т.е.  — косинусы углов, образованных лучом с положительными направлениями осей координат Ох и Оу). При перемещении в данном направлении точки
— косинусы углов, образованных лучом с положительными направлениями осей координат Ох и Оу). При перемещении в данном направлении точки  в точку
в точку  функция
функция  получает приращение
получает приращение
 которое называется приращением функции и в данном направлении (рис. 214). Если
которое называется приращением функции и в данном направлении (рис. 214). Если  есть величина перемещения точки М, то из прямоугольного треугольника МРМ’ получаем
есть величина перемещения точки М, то из прямоугольного треугольника МРМ’ получаем
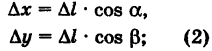
следовательно,

Определение: Под производной  функции и в данном направлении
функции и в данном направлении  понимается предел отношения приращения функции в этом направлении к величине перемещения при условии, что последняя стремится к нулю, т. е.
понимается предел отношения приращения функции в этом направлении к величине перемещения при условии, что последняя стремится к нулю, т. е.

С этой точки зрения производные  можно рассматривать как производные функции и в положительных направлениях осей координат Ох и Оу.
можно рассматривать как производные функции и в положительных направлениях осей координат Ох и Оу.
Производная  дает скорость изменения функции в направлении .
дает скорость изменения функции в направлении .
Выведем формулу для производной , предполагая, что функция  дифференцируема. Из определения дифференциала функции следует, что приращение функции отличается от дифференциала функции на величину высшего порядка малости относительно приращений независимых переменных. Поэтому, используя формулу полного дифференциала, будем иметь
дифференцируема. Из определения дифференциала функции следует, что приращение функции отличается от дифференциала функции на величину высшего порядка малости относительно приращений независимых переменных. Поэтому, используя формулу полного дифференциала, будем иметь

где  при
при  . Отсюда в силу соотношений (2) получаем
. Отсюда в силу соотношений (2) получаем

Следовательно,

Переходя к пределу в последней формуле при  , т.е. при
, т.е. при  , и основываясь на определении (3), получим искомую формулу для производной функции в данном направлении:
, и основываясь на определении (3), получим искомую формулу для производной функции в данном направлении:

где 
Пример №15
Найти приращение функции  при перемещении точки М( 1, 2) в направлении , образующем угол
при перемещении точки М( 1, 2) в направлении , образующем угол  с положительным направлением оси Ох, на расстояние
с положительным направлением оси Ох, на расстояние  . Чему равна производная
. Чему равна производная  в точке М?
в точке М?
Имеем tg а = 3/4, причем 0 < а <  . Отсюда
. Отсюда 
 ; следовательно,
; следовательно,

Используя полученные направляющие косинусы  направления , находим для точки М приращения координат
направления , находим для точки М приращения координат

Таким образом, перемещенная точка М’ имеет координаты

Отсюда искомое приращение функции и равно

Заметим, что  . Далее, имеем
. Далее, имеем

поэтому  и, следовательно,
и, следовательно,

Замечание. Для функции  ее производная в направлении , определяемом вектором =
ее производная в направлении , определяемом вектором =  , равна
, равна

Градиент
Определение: Говорят, что в данной области  определено скалярное поле> если для каждой точки
определено скалярное поле> если для каждой точки  задан некоторый скаляр (т. е. число)
задан некоторый скаляр (т. е. число)

Таким образом, и есть числовая функция точки.
По установившейся традиции слово область здесь служит синонимом слова множество. Точное определение понятия «область».
Примерами скалярных полей являются температурное поле, т. е. распределение температуры в нагретом теле; распределение концентрации вещества в растворе, и т. п.
Если область  расположена на плоскости Оху, то любая ее точка М определяется двумя координатами (х, у) и плоское скалярное поле (1) может быть записано в виде
расположена на плоскости Оху, то любая ее точка М определяется двумя координатами (х, у) и плоское скалярное поле (1) может быть записано в виде

Аналогично, для области со, находящейся в пространстве Oxyz, мы будем иметь

Таким образом, понятие скалярного поля представляет собой физическую трактовку функции нескольких переменных.
Определение: Говорят, что в данной области со определено векторное* поле, если для каждой точки  задан некоторый вектор
задан некоторый вектор

Примерами векторных полей являются поле скоростей в данный момент времени точек потока жидкости; силовое поле, создаваемое некоторым притягивающим центром, и т. п.
Для случая плоского векторного поля (3)  мы будем иметь вектор-функцию
мы будем иметь вектор-функцию

Отсюда, переходя к координатам вектора а, получим

Таким образом, задание плоского векторного поля (4) равносильно заданию двух скалярных полей (5).
Аналогично, для случая пространственного векторного поля  получаем
получаем

или же, в координатах,

Итак, векторное поле (6) эквивалентно трем скалярным полям (7). Этим объясняется удобство векторного языка: он позволяет в одной векторной формуле записывать несколько скалярных соотношений.
Множество всех точек М, для которых скалярное поле (1) сохраняет постоянное значение

называется поверхностью (или линией) уровня скалярного ноля (изоповерхности).
Определение: Пусть

-дифференцируемое плоское скалярное поле. Тогда вектор  называется градиентом поля; или подробнее
называется градиентом поля; или подробнее
где  — единичные векторы, направленные по осям координат Ох и Оу (координатные орты).
— единичные векторы, направленные по осям координат Ох и Оу (координатные орты).
Аналогично, для пространственного скалярного поля

его градиент есть вектор

Таким образом, скалярное поле порождает векторное поле — поле градиентов.
Под производной скалярного поля (8′) в данном направлении  понимается выражение
понимается выражение

где  — направляющие косинусы вектора данного направления. Производная
— направляющие косинусы вектора данного направления. Производная  представляет собой скорость изменения поля в данном направлении.
представляет собой скорость изменения поля в данном направлении.
Теорема: Производная скалярного поля в данном направлении равна проекции градиента поля на данное направление (в соответствующей точке).
Доказательство: Обозначим через  единичный вектор направления .
единичный вектор направления .
Тогда, учитывая формулу (9′) и вспоминая определение скалярного произведения, выражение (10) можно записать в следующем виде:

где  (рис. 215).
(рис. 215).
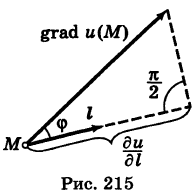
Отсюда

Следствие. Градиент скалярного поля в данной точке по модулю и направлению равен максимальной скорости изменения поля в этой точке.
Действительно, из формулы (11) получаем, что
и при этом cos  = 1. Отсюда находим, что
= 1. Отсюда находим, что  = 0 и, следовательно, направление вектора
= 0 и, следовательно, направление вектора  должно совпадать с направлением grad и, т.е.
должно совпадать с направлением grad и, т.е.  и, где k > 0. Кроме того, для этого направления имеем
и, где k > 0. Кроме того, для этого направления имеем

Замечание. Из следствия вытекает, что градиент поля не зависит от выбора прямоугольной системы координат Oxyz.
Пример №16
Найти модуль и направление градиента поля  в точке М0(2, 1, 0).
в точке М0(2, 1, 0).
Решение:
Имеем

Следовательно,

Отсюда

Точка М0, в которой grad u(M0) = 0, называется особой для скалярного поля; в противном случае точка М0 называется не-особой (обыкновенной).
Приведем без доказательства теорему, выясняющую направление градиента скалярного поля.
Теорема: Во всякой неособой точке плоского скалярного поля градиент поля направлен по нормали к линии уровня, проходящей через эту точку, в сторону возрастания поля.
Частные производные высших порядков
Пусть имеем некоторую функцию  от двух переменных х и у. Ее частные производные
от двух переменных х и у. Ее частные производные

являются функциями от переменных х и у. В некоторых случаях для этих функций существуют снова частные производные, называемые частными производными второго порядка (или просто вторыми частными производными):

Продолжая таким путем дальше, мы можем определить частные производные третьего порядка (третьи частные производные) и т. д.
Аналогично определяются и записываются частные производные высших порядков от функции трех и большего числа переменных.
Можно доказать следующую теорему:
если все входящие в вычисления частные производные, рассматриваемые как функции своих независимых переменных, непрерывны, то результат частного дифференцирования не зависит от последовательности дифференцирования.
В частности, например, если производные  непрерывны, то имеет место равенство
непрерывны, то имеет место равенство
Не приводя доказательство в общем виде, проверим справедливость этого последнего утверждения на отдельных примерах.
Пример №17
Пусть 
Имеем
Мы видим, что для данной функции  соблюдается равенство
соблюдается равенство
как и следовало ожидать.
Признак полного дифференциала
Если функция  дифференцируема, то полный дифференциал ее имеет вид)
дифференцируема, то полный дифференциал ее имеет вид)

где

Возникает обратная задача: при каких условиях дифференциальное выражение

где функции  непрерывны вместе со своими производными первого порядка, является полным дифференциалом некоторой функции и?
непрерывны вместе со своими производными первого порядка, является полным дифференциалом некоторой функции и?
Необходимое условие полного дифференциала дается следующей теоремой.
Теорема: Для того чтобы дифференциальное выражение (3) являлось в области G полным дифференциалом некоторой функции  , необходимо у чтобы в этой области тождественно было выполнено условие
, необходимо у чтобы в этой области тождественно было выполнено условие

(условие полного дифференциала).
Доказательство: Пусть (3) — полный дифференциал функции . Имеем

Отсюда в силу единственности дифференциала получим

Дифференцируя первое равенство (5) по у, а второе — по х, будем иметь ‘

Так как для непрерывных смешанных производных результат дифференцирования не зависит от порядка дифференцирования, то из (6) получаем

т. е. условие (а) выполнено.
Следствие. Если условие (а) не выполнено, то выражение  не является в области G полным дифференциалом некоторой функции.
не является в области G полным дифференциалом некоторой функции.
Замечание. Можно доказать, что для конечной или бесконечной прямоугольной области

выполнение условия (а) также достаточно для существования функции и такой, что

Пример №18
Являются ли выражения

полными дифференциалами некоторых функций?
Решение:
Для первого выражения имеем Р = у. Q = -х. Отсюда
и, следовательно, условие полного дифференциала не выполнено, т. е. не существует функции, полный дифференциал которой равен у dx — х dy.
Для второго выражения получаем Р = У, Q = х и, следовательно,
Условие полного дифференциала выполнено. Так как плоскость можно рассматривать как бесконечную прямоугольную область, то у dx + ху есть полный дифференциал некоторой функции. Действительно,

Максимум и минимум функции нескольких переменных
Напомним, что под окрестностью точки плоскости понимается внутренность любого прямоугольника, окружающего эту точку, исключая саму точку (проколотая окрестность).
Аналогично, под окрестностью точки пространства понимается внутренность произвольного параллелепипеда, содержащего эту точку, за вычетом самой точки.
Определение: Максимумом (строгим) функции f(x, у) называется такое значение  этой функции, которое больше всех ее значений f(x, у), принимаемых данной функцией в точках некоторой окрестности точки
этой функции, которое больше всех ее значений f(x, у), принимаемых данной функцией в точках некоторой окрестности точки  . (Эта окрестность может быть весьма малой по своим линейным размерам.)
. (Эта окрестность может быть весьма малой по своим линейным размерам.)
Аналогично у минимумом (строгим) функции f(x, у) называется такое значение  этой функции, которое меньше всех ее значений f(x, у), принимаемых данной функцией в точках некоторой окрестности точки
этой функции, которое меньше всех ее значений f(x, у), принимаемых данной функцией в точках некоторой окрестности точки  .
.
Максимум или минимум функции f(x, у) называется экстремумом этой функции, а точка, в которой достигается экстремум, называется точкой экстремума (соответственно точкой максимума или точкой минимума функции).
Аналогично определяется экстремум функции  и т. д.
и т. д.
Укажем необходимый признак экстремума функции нескольких переменных.
Теорема: В точке экстремума функции нескольких переменных каждая ее частная производная первого порядка либо равна нулю, либо не существует.
Доказательство: Рассмотрим для простоты функцию двух переменных  , и пусть
, и пусть  — ее максимум (рассуждения для минимума функции аналогичны).
— ее максимум (рассуждения для минимума функции аналогичны).
Зафиксируем одну из переменных, например у, полагая у = у0. Тогда получим функцию одной переменной

которая, очевидно, будет иметь максимум при х = х0. Отсюда на основании теории экстремума функции одной переменной получаем, что

или  не существует.
не существует.
По смыслу определения функция  должна иметь смысл на некотором множестве точек этой окрестности.
должна иметь смысл на некотором множестве точек этой окрестности.
Совершенно так же доказывается, что  или
или  не существует.
не существует.
Следствие. В точке экстремума  дифференцируемой функции f(x, у) выполнены равенства
дифференцируемой функции f(x, у) выполнены равенства

Аналогично, если дифференцируемая функция  имеет экстремум в точке
имеет экстремум в точке  , то
, то

Замечание 1. Точку, в которой частные производные первого порядка некоторой функции либо равны нулю, либо не существуют, назовем критической для данной функции.
Тогда теорема эквивалентна утверждению: экстремумы функции нескольких переменных могут достигаться лишь в критических точках ее.
Замечание 2. Выведенные выше условия экстремума функции, вообще говоря, не являются достаточными, т. е. если, например, в некоторой точке все частные производные первого порядка функции равны нулю, то в этой точке функция не обязательно имеет экстремум.
Пример №19
Для функции f(x, у) = ху имеем

Следовательно, 
Однако точка О(0, 0) не является точкой экстремума функции, так как в любой окрестности точки О имеются точки  (
( > 0 произвольно) такие, что
> 0 произвольно) такие, что

Пример №20
Из всех прямоугольных параллелепипедов, имеющих сумму трех измерений, равную данной положительной величине а, найти тот, объем которого наибольший.
Обозначим измерения рассматриваемого прямоугольного параллелепипеда через  . Его объем V выразится так: V =
. Его объем V выразится так: V =  . Кроме того, согласно условию задачи имеем
. Кроме того, согласно условию задачи имеем

Выразив z через х и у из последнего уравнения и подставив это значение z в выражение для V, получим

где переменные х и у являются независимыми.
Возьмем частные производные от V по х и у:

Приравняв эти частные производные нулю, будем иметь
Так как для искомого параллелепипеда величины х и у заведомо не равны нулю, то мы можем наши уравнения сократить на них. После простых преобразований получим систему
Решая обычным методом эту систему, находим х = а/3 и у = а/3. Следовательно, также z = а/3.
Итак, искомый параллелепипед есть куб, ребро которого равно а/3 (можно строго доказать, что объем его при данных условиях наибольший).
Абсолютный экстремум функции
Рассмотрим некоторое множество G точек плоскости (или пространства).
Точка М называется внутренней для множества G, если она принадлежит этому множеству вместе с некоторой своей окрестностью (рис. 216).
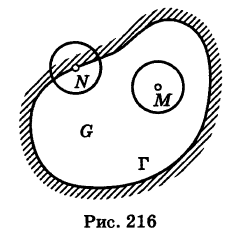
Точка N называется граничной для множества G, если в любой ее полной окрестности имеются точки, как принадлежащие G, так и не принадлежащие ему (рис. 216). Сама точка N не обязательно принадлежит множеству G.
Совокупность всех граничных точек множества G называется его границей Г.
Определение: Множество G будем называть областью, если все его точки — внутренние.
Множество G с присоединенной границей Г, т. е. множество  , называется замкнутой областью.
, называется замкнутой областью.
Область называется ограниченной, если она целиком содержится внутри круга (или шара) достаточно большого радиуса.
Пример:
Внутренность К круга (рис. 217)
есть область; граница ее — окружность  ; круг с присоединенной границей, т. е. совокупность точек, для которых
; круг с присоединенной границей, т. е. совокупность точек, для которых  , — замкнутая область.
, — замкнутая область.
Определение: Наименьшее или наибольшее значение функции в данной области называется аболютным экстремумом функции (соответственно абсолютным минимумом или абсолютным максимумом) в этой области.
Имеет место следующая теорема:
Теорема Вейрштрасса: Функция, непрерывная в ограниченной и замкнутой области, достигает в этой области своего наименьшего и своего наибольшего значений.
Теорема: Абсолютный экстремум функции в данной области достигается либо в критической точке функции, принадлежащей этой области, либо в граничной точке области.
Пример №21
Найти абсолютный экстремум функции z = ху в треугольной области S с вершинами 0(0, 0), А(1, 0), В(0, 2) (рис. 218).
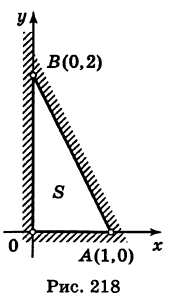
Решение:
Имеем
Отсюда находим критическую точку О(0, 0) с координатами х=0, у = 0, принадлежащую области S.
Изучим поведение функции z на границе Г = ОАВО области S. На участке OA имеем у = 0  . Поэтому z = 0.
. Поэтому z = 0.
Аналогично, на участке ОВ имеем х = 0  , получаем z = 0.
, получаем z = 0.
Наконец, отрезок АВ имеет уравнение 
 , или
, или  Отсюда
Отсюда

Имеем
при х = 1/2, откуда у = 1. Так как 
то в точке  функция z достигает своего наибольшего значения
функция z достигает своего наибольшего значения  на отрезке АВ.
на отрезке АВ.
Итак, наименьшее значение функции  в области S есть
в области S есть  и оно реализуется в точках отрезков OA и ОВ, составляющих часть границы Г области S; наибольшее ее значение М = 1/2 достигается в точке , принадлежащей отрезку АВ границы Г.
и оно реализуется в точках отрезков OA и ОВ, составляющих часть границы Г области S; наибольшее ее значение М = 1/2 достигается в точке , принадлежащей отрезку АВ границы Г.
Построение эмпирических формул по способу наименьших квадратов
В естествознании, в частности в физических и биологических науках, приходится пользоваться эмпирическими формулами, составленными на основании опыта и наблюдения. Один из наилучших методов получения таких формул — это способ наименьших квадратов. Изложим идею этого способа, ограничиваясь случаем линейной зависимости двух величин.
Пусть мы хотим установить зависимость между двумя величинами х и у (например, температурой и удлинением прямолинейного металлического стержня). Производим соответствующие измерения (например,  измерений) и результаты сопоставляем в таблице:
измерений) и результаты сопоставляем в таблице:
Будем рассматривать х и у как прямоугольные координаты точек на плоскости. Предположим, что точки с соответствующими координатами, взятыми из нашей таблицы, почти лежат на некоторой прямой линии, например располагаются так, как показано на рис. 219. Естественно в этом случае считать, что между х и у существует приближенная линейная зависимость, т. е. что у есть линейная функция от х, выражающаяся формулой

где  — некоторые постоянные коэффициенты, подлежащие определению. Формула (1) может быть представлена в таком виде:
— некоторые постоянные коэффициенты, подлежащие определению. Формула (1) может быть представлена в таком виде:

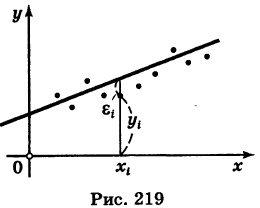
Так как точки (х, у) только приблизительно лежат на нашей прямой, то формулы (1) и (2) приближенные. Следовательно, подставляя в формулу (2) вместо х и у их значения 
 взятые из предыдущей таблицы, мы получим равенства:
взятые из предыдущей таблицы, мы получим равенства:
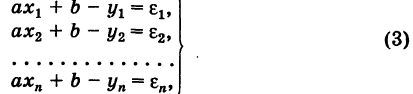
где

— некоторые числа, вообще говоря, не равные нулю, которые мы будем называть погрешностями.
Требуется подобрать коэффициенты  таким образом, чтобы эти погрешности были по возможности малыми по абсолютной величине. Способ наименьших квадратов состоит в следующем: нужно подобрать коэффициенты а и b так, чтобы сумма квадратов погрешностей была возможно меньшей, т. е. потребуем, чтобы сумма
таким образом, чтобы эти погрешности были по возможности малыми по абсолютной величине. Способ наименьших квадратов состоит в следующем: нужно подобрать коэффициенты а и b так, чтобы сумма квадратов погрешностей была возможно меньшей, т. е. потребуем, чтобы сумма

была наименьшей. Если эта минимальная сумма квадратов окажется малой, то тогда и сами погрешности будут малыми по абсолютной величине.
Примечание. Можно было бы попытаться вместо суммы квадратов погрешностей взять сумму их и искать коэффициенты а и b так, чтобы эта сумма была возможно малой по абсолютной величине. Однако это, очевидно, не обеспечит малости погрешностей, так как последние могут иметь различные знаки. Этого не может случиться, если задача решается методом наименьших квадратов.
Заменяя в выражении (5) числа (4) их значениями из равенств (3), получим такую величину:

В формуле (6) числа  получены в результате измерений и рассматриваются как данные; коэффициенты же
получены в результате измерений и рассматриваются как данные; коэффициенты же  — неизвестные величины, подлежащие определению.
— неизвестные величины, подлежащие определению.
Итак, U можно рассматривать как функцию от двух переменных  . Подберем коэффициенты а и b так, чтобы функция U получила возможно меньшее значение. Согласно предыдущему параграфу, для этого необходимо, чтобы соблюдались условия
. Подберем коэффициенты а и b так, чтобы функция U получила возможно меньшее значение. Согласно предыдущему параграфу, для этого необходимо, чтобы соблюдались условия
Беря эти частные производные и для удобства выкладок снабжая их коэффициентом 1/2, будем иметь
Отсюда, приравнивая эти частные производные нулю, получим линейную систему двух уравнений с двумя неизвестными :

Производя обычные алгебраические преобразования, представим эту систему в более простом виде:

или, введя сокращенные обозначения, имеем
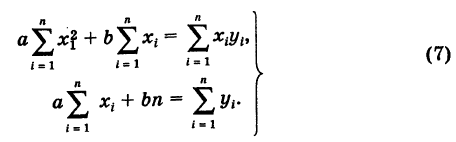 Это окончательный вид так называемой нормальной системы способа наименьших квадратов. Из этой системы мы находим а и bf а затем подставляем их в нашу эмпирическую формулу
Это окончательный вид так называемой нормальной системы способа наименьших квадратов. Из этой системы мы находим а и bf а затем подставляем их в нашу эмпирическую формулу

Пример:
Пусть результаты измерений величин х и у и итоги обработки их занесены в следующую таблицу: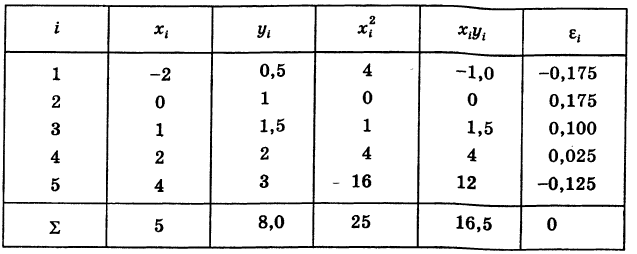
Положим
Нормальная система (7) имеет вид
Решая эти уравнения, получим а = 0,425,  = 1,175. Отсюда
= 1,175. Отсюда

В последнем столбце таблицы даны соответствующие погрешности.
Вычисление функции нескольких переменных
Во многих вопросах естествознания приходится иметь дело с функциями двух, трех и более переменных.
Пример: Площадь прямоугольного треугольника с катетами
 и
и  может быть задана в виде функции
может быть задана в виде функции  где
где 
Пример: Объем прямоугольного параллелепипеда с измерениями  и
и  представляет собой функцию
представляет собой функцию  где
где 
Пример: Величина силы притяжения  двух материальных точек, имеющих массы
двух материальных точек, имеющих массы  и
и  и занимающих соответственно положения
и занимающих соответственно положения  и
и  согласно закону Ньютона задается формулой
согласно закону Ньютона задается формулой 
где  — некоторая константа, так называемая «постоянная тяготения».
— некоторая константа, так называемая «постоянная тяготения».
Определение 10.1. Если каждой упорядоченной совокупности значений переменных  соответствует определенное значение переменной
соответствует определенное значение переменной  то будем называть
то будем называть  функцией независимых переменных
функцией независимых переменных  и записывать
и записывать  В случае
В случае 
Замечание 10.1. Всякая функция от нескольких переменных (ФНП) становится функцией от меньшего числа переменных, если часть переменных зафиксировать, т. е. придать им постоянные значения.
Как и в случае одной независимой переменной ФНП существует, вообще говоря, не для любых значений 
Определение 10.2. Совокупность наборов  (точек
(точек  при которых определяется функция
при которых определяется функция  называется областью определения или областью существования этой функции.
называется областью определения или областью существования этой функции.
Область определения функции двух переменных представляет собой некоторое множество точек плоскости и наглядно иллюстрируется геометрически. Если каждую пару значений  и
и  изображать точкой
изображать точкой  в плоскости
в плоскости  то область определения функции будет представлять собой некоторую совокупность точек на плоскости. В частности, областью определения может быть и вся плоскость. На практике изучаются случаи областей, представляющих часть плоскости, ограниченную линией. Линия, ограничивающая данную область, называется границей области. Точки области, не лежащие на границе, называются внутренними точками области.
то область определения функции будет представлять собой некоторую совокупность точек на плоскости. В частности, областью определения может быть и вся плоскость. На практике изучаются случаи областей, представляющих часть плоскости, ограниченную линией. Линия, ограничивающая данную область, называется границей области. Точки области, не лежащие на границе, называются внутренними точками области.
Пример №22
Найти область определения функции 
Решение.
Область определения функции будет задана условием 
или  т. е. представляет собой единичный круг с центром в начале координат.
т. е. представляет собой единичный круг с центром в начале координат.
Определение 10.3. Геометрическим изображением или графиком функции двух переменных  называется множество точек пространства
называется множество точек пространства  определяющее, вообще говоря, поверхность в системе координат
определяющее, вообще говоря, поверхность в системе координат 
Геометрические изображения функций трех и большего числа переменных не имеют простого геометрического смысла.
Определение 10.4. Линией уровня функции  называется множество точек плоскости
называется множество точек плоскости  для которых данная функция имеет одно и то же значение (изокривая).
для которых данная функция имеет одно и то же значение (изокривая).
Таким образом, уравнение линии уровня имеет вид  где
где  — некоторая постоянная.
— некоторая постоянная.
Пример №23
Построить семейство линий уровня функции 
Решение.
Придавая  неотрицательные значения
неотрицательные значения  получим следующие уравнения линий уровня функции:
получим следующие уравнения линий уровня функции:
 — точка
— точка 
 — окружность радиуса
— окружность радиуса 
 — окружность радиуса
— окружность радиуса  и т. д.
и т. д.
Таким образом, линии уровня данной функции представляют собой семейство концентрических окружностей с центром в точке  Построив эти линии, получим «карту поверхности» для данной функции с отмеченными высотами (рис. 10.1).
Построив эти линии, получим «карту поверхности» для данной функции с отмеченными высотами (рис. 10.1).
На рисунке видно, что функция  растет вдоль каждого радиального направления. Поэтому в системе координат
растет вдоль каждого радиального направления. Поэтому в системе координат  геометрический образ функции представляет собой гигантскую «яму» с круто растущими краями. Геометрически — это параболоид вращения (рис. 10.2).
геометрический образ функции представляет собой гигантскую «яму» с круто растущими краями. Геометрически — это параболоид вращения (рис. 10.2).
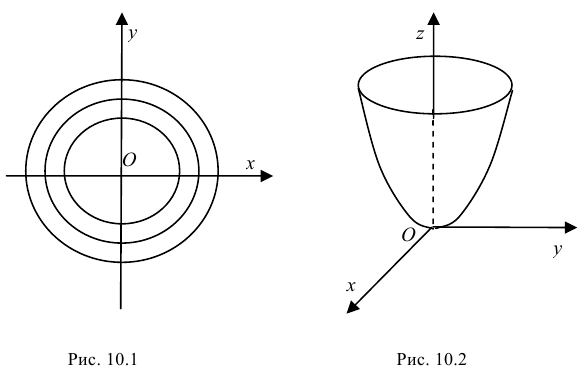
Определение 10.5. Поверхностью уровня функции 
называется множество точек пространства  для которых данная функция имеет одно и то же значение (изоповерхпость).
для которых данная функция имеет одно и то же значение (изоповерхпость).
Линии и поверхности уровня постоянно встречаются в физических вопросах. Например, соединив на карте поверхности Земли точки с одинаковой среднесуточной температурой или давлением, получим изотермы и изобары, являющиеся важными исходными данными для прогноза погоды. Параллели и меридианы на глобусе -это линии уровня функций широты и долготы.
Предел и непрерывность ФНП
Рассмотрим функцию двух переменных 
Определение 11.1. Окрестностью радиуса  точки
точки  называется совокупность всех точек
называется совокупность всех точек  удовлетворяющих неравенству
удовлетворяющих неравенству

т. е. совокупность всех точек, лежащих внутри круга радиуса с центром в точке 
В дальнейшем, говоря, что функция  обладает каким-либо свойством «вблизи точки
обладает каким-либо свойством «вблизи точки  » или «в окрестности точки», под этим будем подразумевать, что найдется такой круг с центром
» или «в окрестности точки», под этим будем подразумевать, что найдется такой круг с центром  во всех точках которого данная функция обладает указанным свойством.
во всех точках которого данная функция обладает указанным свойством.
Пусть функция  определена в некоторой области
определена в некоторой области  плоскости
плоскости  Рассмотрим некоторую определенную точку
Рассмотрим некоторую определенную точку  лежащую в области
лежащую в области  или на ее границе.
или на ее границе.
Определение 11.2. Число  называется пределом функции
называется пределом функции  при стремлении точки
при стремлении точки  к точке
к точке  (или при
(или при  ), если для
), если для  такое, что для всех точек
такое, что для всех точек  удовлетворяющих условию
удовлетворяющих условию  будет выполнено:
будет выполнено:  Обозначение:
Обозначение:
- Заказать решение задач по высшей математике
Пример №24
Найти предел 
Решение.
Обозначим 
Условие  равносильно тому, что
равносильно тому, что  Получим
Получим
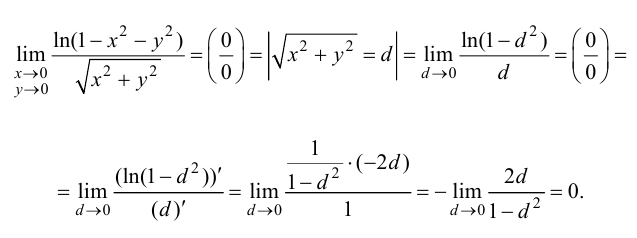
Ответ: 0.
Вычисление пределов функций двух переменных, как правило, оказывается более трудной задачей по сравнению со случаем функций одной переменной. Причина состоит в том, что на прямой существуют всего два направления, по которым аргумент может стремиться к предельной точке — а именно, справа и слева. На плоскости же таких направлений бесконечное множество и пределы функций по разным направлениям могут не совпадать.
Пример №25
Доказать, что  — не существует.
— не существует.
Решение.
Будем приближаться к точке  по прямым
по прямым 

Таким образом, значение предела зависит от углового коэффициента прямой. Но, так как предел функции не должен зависеть от способа приближения точки  к точке
к точке  то рассматриваемый предел не существует.
то рассматриваемый предел не существует.
Ответ: предел не существует.
Замечание 11.1. Для функции  переменных
переменных  можно рассматривать
можно рассматривать  так называемых повторных пределов. В частности, в случае функции двух переменных
так называемых повторных пределов. В частности, в случае функции двух переменных  можно рассматривать два повторных предела в точке
можно рассматривать два повторных предела в точке 
 и
и 
Пример №26
Вычислить повторные пределы функции  в точке
в точке 
Решение.
Вывод. Так как повторные пределы конечны, но имеют различные значения, то при вычислении повторных пределов порядок следования предельных переходов по разным значениям влияет на результат.
Определение 11.3. Функция  называется непрерывной в точке
называется непрерывной в точке  если она:
если она:
1) определена в точке 
2) имеет конечный предел при 
3) предел равен значению функции в точке, т. е. 
Нарушение любого или нескольких из условий определения дает точку разрыва функции.
Геометрический смысл непрерывности состоит в том, что график функции в точке  представляет собой сплошную не расслаивающуюся поверхность.
представляет собой сплошную не расслаивающуюся поверхность.
Пусть переменной  дано приращение
дано приращение  а переменная у оставлена неизменной. Тогда разность
а переменная у оставлена неизменной. Тогда разность
 (11.1)
(11.1)
называется частным приращением функции  по переменной
по переменной 
Если неизменной остается переменная  то разность
то разность
 (11.2)
(11.2)
называется частным приращением функции  по переменной
по переменной 
В случае, когда обе переменные  и
и  получают соответствующие приращения
получают соответствующие приращения  и
и  приращение функции
приращение функции
 (11.3) называется полным приращением функции
(11.3) называется полным приращением функции 
Естественно, при определении данных понятий рассматриваются лишь такие точки  и
и  для которых функция
для которых функция  определена. Из формул (11.1), (11.2) и (11.3) следует, что
определена. Из формул (11.1), (11.2) и (11.3) следует, что

Пример №27
Найти полное и частные приращения функции  если
если  изменяется от 2 до 2,2,
изменяется от 2 до 2,2,  изменяется от 1 до 0,9.
изменяется от 1 до 0,9.
Решение.
Вычислим значения функции  в точках (2; 1), (2,2; 1), (2; 0,9) и (2,2; 0,9). Получим
в точках (2; 1), (2,2; 1), (2; 0,9) и (2,2; 0,9). Получим
 и
и 
Тогда

Так как  то имеем случай
то имеем случай

Ответ: 
Определение 11.4. Функция  называется непрерывной в предельной точке
называется непрерывной в предельной точке  из области определения функции, если
из области определения функции, если

Заметим, что предельной точкой области определения называется точка, для которой функция определена как и в ней самой, так и в некоторой ее окрестности.
Определение 11.5. Функция  называется непрерывной в области
называется непрерывной в области  если функция непрерывна в каждой точке рассматриваемой области, т. е. если для каждой точки
если функция непрерывна в каждой точке рассматриваемой области, т. е. если для каждой точки  области выполнено:
области выполнено:

Частные производные функции нескольких переменных
Определение 12.1. Частной производной функции нескольких переменных по одной из этих переменных называется предел отношения соответствующего частного приращения функции к приращению рассматриваемой независимой переменной при стремлении приращения переменной к нулю (если этот предел существует).
Обозначения в случае  и
и  или
или  и
и  или
или
 и
и  или
или  и
и 
Таким образом, для функции  по определению:
по определению:
 (12.1)
(12.1)
 (12.2)
(12.2)
Согласно формулам (12.1) и (12.2), если для функции  вычисляется производная
вычисляется производная  то переменная
то переменная  считается постоянной; если же вычисляется производная
считается постоянной; если же вычисляется производная  то переменная
то переменная  считается постоянной. Следовательно, частное дифференцирование не требует никаких новых правил, и можно пользоваться известными формулами.
считается постоянной. Следовательно, частное дифференцирование не требует никаких новых правил, и можно пользоваться известными формулами.
В общем случае, если  и требуется найти
и требуется найти 
постоянными следует считать переменные 
Пример: Найти частные производные функции 
Ответ: 
Пример: Найти частные производные функции 
Ответ: 
Геометрический смысл частных производных: геометрическим изображением функции  является некоторая поверхность
является некоторая поверхность  Полагая
Полагая  получим некоторую плоскую кривую
получим некоторую плоскую кривую  . (рис. 12.1). Пусть
. (рис. 12.1). Пусть  — касательная к кривой
— касательная к кривой  в точке
в точке  — угол, образованный этой касательной с положительным направлением оси
— угол, образованный этой касательной с положительным направлением оси 
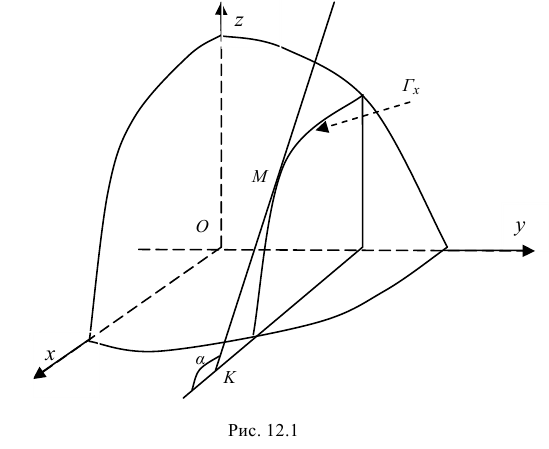
Так как  на основании геометрического смысла производной функции одной переменной, имеем
на основании геометрического смысла производной функции одной переменной, имеем 
Аналогичный смысл имеет и 
Частные производные высших порядков
Рассмотрим функцию  Если данная функция имеет в некоторой открытой области
Если данная функция имеет в некоторой открытой области  частную производную по одной из переменных, то данная производная, сама являясь функцией от
частную производную по одной из переменных, то данная производная, сама являясь функцией от  и
и  может в свою очередь в некоторой точке
может в свою очередь в некоторой точке  иметь частную производную по той же или другой переменной. Для исходной функции частные производные
иметь частную производную по той же или другой переменной. Для исходной функции частные производные  и
и  называют частными производными первого порядка. Тогда, если первая производная была взята, например, по
называют частными производными первого порядка. Тогда, если первая производная была взята, например, по  ее производные
ее производные
 и
и 
или  и
и называются частными производными второго порядка.
называются частными производными второго порядка.
Аналогичным образом определяются частные производные третьего, четвертого и более высоких порядков.
Частная производная высшего порядка, взятая по различным переменным, например,  называется смешанной частной производной.
называется смешанной частной производной.
Пример №28
Найти все частные производные второго порядка
функции 
Решение.
Ответ: 
Пример №29
Найти все частные производные второго порядка
функции 
Решение.
Ответ: 
 Заметим, что равенство смешанных производных не вытекает из самого определения смешанных производных. Существуют случаи, когда такого совпадения не наблюдается.
Заметим, что равенство смешанных производных не вытекает из самого определения смешанных производных. Существуют случаи, когда такого совпадения не наблюдается.
Теорема 13.1*. Пусть:
1) функция  определена в открытой области
определена в открытой области 
2) в этой области существуют первые производные  и
и 
3) в этой области существуют вторые смешанные производные  и
и  которые, как функции
которые, как функции  и
и  непрерывны в некоторой точке
непрерывны в некоторой точке  области
области 
Тогда в этой точке

Дифференцируемость ФНП
Определение 14.1. Функция  называется дифференцируемой в точке
называется дифференцируемой в точке  если ее полное приращение в этой точке можно представить в виде
если ее полное приращение в этой точке можно представить в виде
 (14.1)
(14.1)
где  и
и  — бесконечно малые функции при
— бесконечно малые функции при  и
и 
Теорема 14.1. Если функция  дифференцируема в точке
дифференцируема в точке  то она непрерывна в этой точке.
то она непрерывна в этой точке.
Доказательство.
Если функция  дифференцируема в точке
дифференцируема в точке  то из формулы (14.1) следует, что
то из формулы (14.1) следует, что  или
или
откуда  что и означает непрерывность функции в точке.
что и означает непрерывность функции в точке.
Теорема 14.2 (необходимые условия дифференцируемости).
Если функция  дифференцируема в точке
дифференцируема в точке  то она имеет в этой точке частные производные
то она имеет в этой точке частные производные  и
и  причем
причем 
Доказательство.
Так как функция  дифференцируема в точке
дифференцируема в точке  то ее приращение в этой точке представимо в виде (14.1). Полагая
то ее приращение в этой точке представимо в виде (14.1). Полагая  получим
получим

где  — бесконечно малая функция при
— бесконечно малая функция при 
Разделив полученное выражение на  и перейдя к пределу при
и перейдя к пределу при  получим
получим

С другой стороны, по определению частной производной,
Следовательно, в точке  существует
существует 
Аналогично доказывается, что в точке  существует
существует 
Замечание 14.1. Обратные утверждения к теоремам 14.1 и 14.2 не верны, т. е. из непрерывности ФНП в точке  и существования частных производных не следует дифференцируемость.
и существования частных производных не следует дифференцируемость.
Пример:
Функция
непрерывна на всей плоскости, на всей плоскости имеет частные производные, однако формула (14.1) не имеет места для данной функции в точке 
Теорема 14.3* (достаточное условие дифференцируемости).
Если функция  имеет частные производные в некоторой
имеет частные производные в некоторой  окрестности точки
окрестности точки  непрерывные в самой точке то функция дифференцируема в этой точке.
непрерывные в самой точке то функция дифференцируема в этой точке.
Понятие дифференцируемости для функции трех и более переменных вводится аналогично.
Определение 14.2. Функция нескольких переменных, дифференцируемая в каждой точке некоторого множества, называется дифференцируемой на этом множестве.
Полный дифференциал ФНП и его использование в приближенных вычислениях
Определение 15.1. Полным дифференциалом  дифференцируемой в точке
дифференцируемой в точке  функции
функции  называется главная, линейная относительно приращений
называется главная, линейная относительно приращений  и
и  часть полного приращения этой функции в точке
часть полного приращения этой функции в точке  т. е.
т. е.

Напомним (см. раздел 2), что для независимых переменных  и
и  их любые приращения
их любые приращения  и
и  считают дифференциалами:
считают дифференциалами: 
Тогда полный дифференциал функции  можно записать в виде
можно записать в виде
 (15.1)
(15.1)
Полный дифференциал имеет широкое применение в приближенных вычислениях. Если рассмотреть функцию  дифференцируемую в точке
дифференцируемую в точке  то
то

откуда

Так как  то, используя представление
то, используя представление  по формуле (15.1), получим
по формуле (15.1), получим
 (15.2)
(15.2)
приближенная формула, верная с точностью до бесконечно малых более высоких порядков относительно  и
и 
Пример №30
Вычислить приближенно 
Решение.
Рассмотрим функцию  Искомое число можно считать приращенным значением функции в точке
Искомое число можно считать приращенным значением функции в точке  при
при 
Согласно формуле (15.2): 
Поскольку 
то окончательно получим 
Ответ: 
С помощью полного дифференциала функции можно также выяснить, как отражаются на значении функции погрешности ее аргументов.
Пример №31
Определить предельную абсолютную погрешность  функции
функции  зная предельные абсолютные погрешности
зная предельные абсолютные погрешности  и
и  ее аргументов
ее аргументов  и
и  и
и 
Решение. По определению: 
Заменяя приращение функции ее дифференциалом, получим
откуда можно получить оценку:

Следовательно, за предельную абсолютную погрешность функции  можно принять
можно принять
 (15.3)
(15.3)
Используя (15.3), можно также определить относительную погрешность функции 
Ответ: 
Определение 15.2. Полным дифференциалом второго порядка функции 
называется полный дифференциал от ее полного дифференциала.
По определению, получим

Частные производные сложной функции
Предположим, что в формуле
 (16.1)
(16.1)
переменные  и
и  являются непрерывными функциями независимых переменных
являются непрерывными функциями независимых переменных  и
и 
 и
и  (16.2)
(16.2)
В этом случае функция  является сложной функцией аргументов
является сложной функцией аргументов  и
и 
Предположим, что функции  имеют непрерывные частные производные по всем своим аргументам. Вычислим частные производные
имеют непрерывные частные производные по всем своим аргументам. Вычислим частные производные  и
и  исходя из формул (16.1) и (16.2) и не используя непосредственное представление функции
исходя из формул (16.1) и (16.2) и не используя непосредственное представление функции  через
через  и
и 
Придадим аргументу приращение  сохраняя значение
сохраняя значение  неизменным. Тогда, в силу (16.2),
неизменным. Тогда, в силу (16.2),  и
и  получат приращения
получат приращения  и
и  но тогда и функция
но тогда и функция  получит следующее приращение:
получит следующее приращение:

где  и
и  — бесконечно малые функции при
— бесконечно малые функции при  Разделим обе части формулы на
Разделим обе части формулы на 

Если  то, в силу непрерывности
то, в силу непрерывности  и
и  и
и 
Переходя к пределу при  получим
получим
 (16.3)
(16.3)
Если придать аргументу  приращение
приращение  сохраняя значение
сохраняя значение  неизменным, то с помощью аналогичных рассуждений можно получить
неизменным, то с помощью аналогичных рассуждений можно получить
 (16.4)
(16.4)
Пример №32
Найти частные производные  и
и  для функции
для функции  если
если  и
и 
Решение.
Получим
где  и
и 
Заметим, что при записи ответа в выражения для частных производных вместо  и
и  можно подставить их выражения через
можно подставить их выражения через  и
и  однако это повлечет за собой громоздкие выражения.
однако это повлечет за собой громоздкие выражения.
Ответ: 
где и
Для случая большего числа переменных формулы (16.3) и (16.4) естественным образом обобщаются. Например, если  где
где  и
и  то
то
Пусть исходная функция имеет вид  где
где  и
и  зависят от одной переменной
зависят от одной переменной  Тогда, по сути, функция
Тогда, по сути, функция  является функцией только одной переменной
является функцией только одной переменной  и можно ставить вопрос о нахождении производной которая называется полной производной функции
и можно ставить вопрос о нахождении производной которая называется полной производной функции 
 (16.5)
(16.5)
Пример №33
Найти  и
и  для функции
для функции  если
если 
Решение:
Формула (16.5) в данном случае принимает вид:

Поэтому

Ответ: 
где 
Производная от функции, заданной неявно
Теорема 17.1. Пусть непрерывная функция  от
от  задается уравнением
задается уравнением
 (17.1)
(17.1)
и  — непрерывные функции в некоторой области
— непрерывные функции в некоторой области  содержащей точку
содержащей точку  координаты которой удовлетворяют уравнению (17.1), причем
координаты которой удовлетворяют уравнению (17.1), причем 
Тогда функция  от
от  будет иметь производную
будет иметь производную
 (17.2)
(17.2)
Доказательство.
Пусть некоторому значению  соответствует значение функции
соответствует значение функции  при этом
при этом 
Придадим независимой переменной  приращение
приращение  тогда функция
тогда функция  получит приращение
получит приращение  т. е. значению переменной
т. е. значению переменной  соответствует значение функции
соответствует значение функции  В силу (17.1)
В силу (17.1)
 поэтому
поэтому 
Выражение слева представляет собой полное приращение функции двух переменных, которое также можно записать в виде:
где  и
и  — БМФ при
— БМФ при  и
и 
Откуда

Разделим обе части равенства на  и выразим
и выразим 
Переходя к пределу при  получим
получим 
Следует заметить, что в данном случае производная  определяемая формулой (17.2), представляет собой производную
определяемая формулой (17.2), представляет собой производную  функции одной переменной
функции одной переменной  заданной неявно.
заданной неявно.
Пример №34
Найти производную функции  заданной уравнением
заданной уравнением 
Решение.
Заметим, что уравнение  задает две непрерывные
задает две непрерывные
функции  и
и  поэтому непосредственное вычисление производной не может быть выполнено.
поэтому непосредственное вычисление производной не может быть выполнено.
dF dF
Воспользуемся формулой (17.2). Так как  то
то
Ответ: 
Теорема 17.2*. Пусть функция  непрерывна в окрестности точки
непрерывна в окрестности точки  и имеет в ней непрерывные частные производные, причем
и имеет в ней непрерывные частные производные, причем  a
a  Тогда существует окрестность, содержащая точку
Тогда существует окрестность, содержащая точку  в которой уравнение
в которой уравнение  определяет однозначную функцию
определяет однозначную функцию 
Пусть функция  от переменных
от переменных  и
и  задается уравнением
задается уравнением
Найдем частные производные  и
и  Считая переменную
Считая переменную 
постоянной и используя формулу (17.2), получим частную производную  Аналогично можно получить
Аналогично можно получить  Заметим, что при получении формул использовано предположение
Заметим, что при получении формул использовано предположение 
Пример №35
Найти частные производные функции  заданной уравнением
заданной уравнением 
Решение.
Преобразуем исходное уравнение к виду  и найдем
и найдем
частные производные 
Воспользуемся формулами  и
и  Получаем
Получаем


Ответ: 
Производная ФНП по направлению
Рассмотрим в области  непрерывную функцию
непрерывную функцию  имеющую непрерывные частные производные по всем своим переменным. Проведем из некоторой точки
имеющую непрерывные частные производные по всем своим переменным. Проведем из некоторой точки  данной области вектор
данной области вектор  По направлению вектора
По направлению вектора  на расстоянии
на расстоянии  от его начала, рассмотрим точку
от его начала, рассмотрим точку  рис. 18.1
рис. 18.1
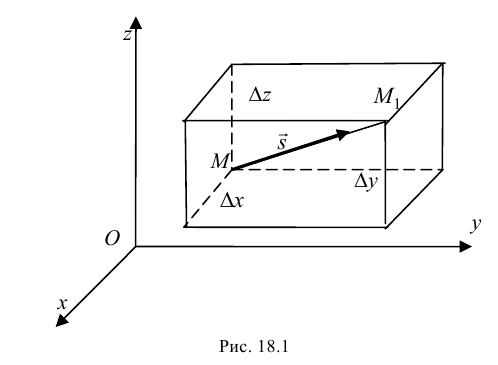
Таким образом, 
Рассмотрим полное приращение функции 
 (18.1)
(18.1)
где  — БМФ при
— БМФ при 
Разделим обе части равенства (18.1) на 
 (18.2)
(18.2)
Очевидно, что

Следовательно, равенство (18.2) можно переписать в виде:

 (18.3)
(18.3)
где  — бесконечно малые функции при
— бесконечно малые функции при 
Определение 18.1. Производной от функции  в точке
в точке  по направлению вектора
по направлению вектора  называется предел отношения
называется предел отношения  при
при 
Обозначение: 
Производная  показывает скорость изменения функции
показывает скорость изменения функции  в направлении вектора
в направлении вектора 
Переходя к пределу в равенстве (18.3), получим
 (18.4)
(18.4)
Из (18.4) следует, что, зная частные производные функции, легко найти производную по любому направлению вектора 
Заметим, что частные производные являются, по сути, частными случаями производной по направлению.
Так, например, при  и
и 

Пример №36
Для функции  найти производную
найти производную  в точке
в точке  по направлению вектора
по направлению вектора 
Решение.
Найдем частные производные функции в точке 

Так как  то направляющие косинусы вектора
то направляющие косинусы вектора  будут определяться формулами:
будут определяться формулами: 
Тогда 
Следовательно, 
Ответ: 
Градиент
Рассмотрим функцию  определенную в области
определенную в области 
Определение 19.1. Говорят, что в области  определено скалярное поле, если для каждой точки
определено скалярное поле, если для каждой точки  задано некоторое число (скаляр), т. е.
задано некоторое число (скаляр), т. е.

Таким образом, функция  — числовая функция точки.
— числовая функция точки.
Пример: Температурное поле; распределение концентрации вещества в растворе.
Определение 19.2. Говорят, что в области  определено векторное поле, если для каждой точки
определено векторное поле, если для каждой точки  задан некоторый вектор, т. е.
задан некоторый вектор, т. е.
Пример: Силовое поле, создаваемое некоторым притягивающим центром.
В каждой точке области  в которой задана функция
в которой задана функция  определим вектор, проекциями которого на оси координат являются частные производные
определим вектор, проекциями которого на оси координат являются частные производные  и
и  этой функции в соответствующей точке:
этой функции в соответствующей точке:
Этот вектор называется градиентом функции 
Обозначение:  — набла).
— набла).
Таким образом, скалярное поле, задаваемое функцией  порождает векторное поле — поле градиентов
порождает векторное поле — поле градиентов 
Теорема 19.1. Пусть дано скалярное поле  и в нем определено поле градиентов. Тогда производная
и в нем определено поле градиентов. Тогда производная  по направлению некоторого вектора
по направлению некоторого вектора  равна проекции вектора
равна проекции вектора  на вектор
на вектор
Доказательство.
Рассмотрим единичный вектор  соответствующий вектору
соответствующий вектору 

Вычислим скалярное произведение векторов  и
и 
 (19.1)
(19.1)
Правая часть формулы (19.1) — производная функции  по направлению вектора
по направлению вектора  Следовательно,
Следовательно, 
Если обозначить угол между векторами  и
и  через
через  то можно записать:
то можно записать:
 (19.2)
(19.2)
Свойства градиента
1. Производная в точке по направлению вектора  имеет наибольшее значение, если направление вектора
имеет наибольшее значение, если направление вектора  совпадает с направлением градиента. Это наибольшее значение производной равно
совпадает с направлением градиента. Это наибольшее значение производной равно  (следует непосредственно из равенства (19.2)).
(следует непосредственно из равенства (19.2)).
2. Производная по направлению вектора, перпендикулярного к вектору  равна нулю (следует из равенства (19.2) при
равна нулю (следует из равенства (19.2) при 
Определение 19.3. Точка  в которой
в которой 
называется особой для скалярного поля; в противном случае обыкновенной (неособой).
Теорема 19.2*. Во всякой неособой точке плоского  скалярного поля градиент поля направлен по нормали к линии уровня, проходящей через эту точку, в сторону возрастания поля.
скалярного поля градиент поля направлен по нормали к линии уровня, проходящей через эту точку, в сторону возрастания поля.
Пример №37
Найти скорость и направление наибыстрейшего возрастания функции  в точке
в точке 
Решение.
Направление наибыстрейшего возрастания функции в точке совпадает с направлением градиента, а его скорость равна значению длины градиента в этой точке.
Найдем градиент функции в общем виде 
В данном случае  В точке
В точке 
Скорость возрастания составит:

Ответ: направление наибыстрейшего возрастания функции  в точке
в точке  задается вектором
задается вектором  а его скорость составляет
а его скорость составляет 
Касательная плоскость и нормаль к поверхности
Рассмотрим функцию  Ее графиком является некоторая поверхность
Ее графиком является некоторая поверхность 
Определение 20.1. Касательной плоскостью к поверхности  в данной точке
в данной точке  называется плоскость, которая содержит все касательные к кривым, проведенным на поверхности через эту точку.
называется плоскость, которая содержит все касательные к кривым, проведенным на поверхности через эту точку.
Получим уравнение касательной плоскости к поверхности  в точке
в точке  Рассмотрим сечения поверхности
Рассмотрим сечения поверхности  плоскостями
плоскостями  и
и  (рис. 20.1). Линия пересечения
(рис. 20.1). Линия пересечения  поверхности
поверхности  с плоскостью
с плоскостью  будет определяться системой
будет определяться системой  линия пересечения
линия пересечения  поверхности
поверхности  с плоскостью
с плоскостью
 будет определяться системой
будет определяться системой 
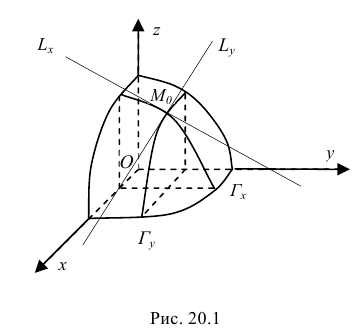
Уравнения касательных прямых  и
и  к линиям
к линиям  и
и  в точке
в точке  можно представить через пересечение плоскостей соответственно
можно представить через пересечение плоскостей соответственно
 (20.1)
(20.1)
 (20.2)
(20.2)
Уравнение плоскости по точке  и вектору нормали
и вектору нормали  имеет вид
имеет вид  откуда при
откуда при 
 (20.3)
(20.3)
Касательные прямые  и
и  к линиям
к линиям  и
и  получаются сечением плоскости (формула (20.3)) двумя плоскостями
получаются сечением плоскости (формула (20.3)) двумя плоскостями  и
и  Следовательно, уравнения касательной прямой
Следовательно, уравнения касательной прямой  имеют вид
имеют вид
 (20.4)
(20.4)
уравнения касательной прямой  имеют вид
имеют вид
 (20.5)
(20.5)
Сравнивая коэффициенты при  в формулах (20.2) и (20.5), при
в формулах (20.2) и (20.5), при  в формулах (20.1) и (20.4), получим
в формулах (20.1) и (20.4), получим
Подставим эти значения в уравнение (20.3), преобразуем и получим уравнение касательной плоскости  проходящей через касательные прямые
проходящей через касательные прямые  и
и 
 (20.6)
(20.6)
В случае неявного задания поверхности  уравнением
уравнением  так как
так как

уравнение касательной плоскости  проходящей через касательные прямые
проходящей через касательные прямые  и
и  принимает вид
принимает вид
 (20.7)
(20.7)
Заметим, что точка, в которой хотя бы одна из частных производных  или
или  не существует
не существует
или обращается в нуль, называется особой точкой поверхности. В такой точке поверхность может не иметь касательной плоскости.
Определение 20.2. Нормалью к поверхности  в точке называется прямая, проходящая через эту точку перпендикулярно к касательной плоскости, проведенной в данной точке поверхности.
в точке называется прямая, проходящая через эту точку перпендикулярно к касательной плоскости, проведенной в данной точке поверхности.
Воспользуемся условием перпендикулярности прямой и плоскости и запишем уравнения нормали к поверхности  в точке
в точке 
 (20
(20 
В случае неявного задания поверхности  уравнением
уравнением  уравнения нормали к поверхности в точке
уравнения нормали к поверхности в точке  примут вид
примут вид
 (20.9)
(20.9)
Пример №38
Найти уравнения касательной плоскости и нормали к поверхности  в точке
в точке 
Решение.
Найдем частные производные функции  в точке
в точке 

Уравнение касательной плоскости найдем по формуле (20.6):
Уравнения нормали найдем по формуле (20.8):
 или
или 
Ответ: 
Пример №39
Найти уравнения касательной плоскости и нормали к поверхности  в точке
в точке 
Решение.
Найдем частные производные функции  в точке
в точке 

Уравнение касательной плоскости найдем по формуле (20.7):
Уравнения нормали найдем по формуле (20.9):
 или
или 
Ответ: 
Необходимые и достаточные условия локального экстремума функции двух переменных
Определение 21.1. Функция  имеет локальный максимум (минимум) в точке
имеет локальный максимум (минимум) в точке  если существует
если существует  окрестность данной точки, такая, что для всех точек этой окрестности выполняется неравенство
окрестность данной точки, такая, что для всех точек этой окрестности выполняется неравенство 
Пример: Функция  достигает минимума в точке
достигает минимума в точке 
Теорема 21.1*(необходимые условия экстремума). Если функция  имеет экстремум в точке
имеет экстремум в точке  то каждая частная производная первого порядка данной функции или обращается в этой точке в нуль, или не существует.
то каждая частная производная первого порядка данной функции или обращается в этой точке в нуль, или не существует.
Так же, как и в случае функции одной переменной, точки, в которых частные производные обращаются в нуль или не существуют, называются критическими (стационарными) точками функции 
Теорема 21.2* (достаточные условия экстремума). Пусть функция  определена и имеет непрерывные частные производные второго порядка в некоторой области
определена и имеет непрерывные частные производные второго порядка в некоторой области  Пусть точка
Пусть точка  — критическая точка функции
— критическая точка функции  Обозначим
Обозначим
Тогда, если
то в точке  функция
функция  имеет экстремум, причем если
имеет экстремум, причем если  — максимум, если
— максимум, если  — минимум;
— минимум;
 — функция экстремума не имеет;
— функция экстремума не имеет;
 — необходимы дополнительные исследования.
— необходимы дополнительные исследования.
Заметим, что в случае  т.е. когда в точке
т.е. когда в точке  функция не имеет ни минимума, ни максимума, поверхность, служащая графиком функции, может вблизи этой точки иметь форму «седла». Например,
функция не имеет ни минимума, ни максимума, поверхность, служащая графиком функции, может вблизи этой точки иметь форму «седла». Например,  (рис. 21.1). В этом случае говорят, что в данной точке наблюдается явление минимакса.
(рис. 21.1). В этом случае говорят, что в данной точке наблюдается явление минимакса.
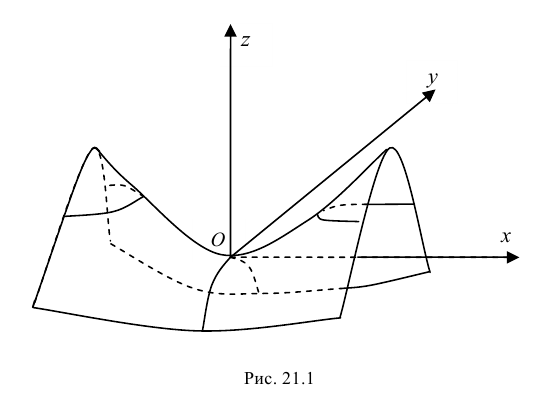
Теорема 21.3* (достаточные условия экстремума). Пусть функция  определена и имеет непрерывные частные производные второго порядка в некоторой области
определена и имеет непрерывные частные производные второго порядка в некоторой области  Пусть точка
Пусть точка  — критическая точка функции
— критическая точка функции  Тогда, если:
Тогда, если:
 (при
(при  ), то в точке
), то в точке  функция
функция  имеет максимум;
имеет максимум;
 (при
(при  ), то в точке
), то в точке  функция
функция  имеет минимум.
имеет минимум.
Пример №40
Исследовать на экстремум функцию

Решение.
Используя необходимые условия экстремума, найдем критические точки. Для этого найдем частные производные первого порядка
и решим систему уравнении
Таким образом, получены две критические точки  и
и 
Для исследования характера критических точек найдем частные производные второго порядка 
Тогда 
Для точки  т. е. в этой точке функция не имеет экстремума.
т. е. в этой точке функция не имеет экстремума.
Для точки  т. е. в этой точке функция имеет экстремум, причем
т. е. в этой точке функция имеет экстремум, причем  следовательно, это минимум.
следовательно, это минимум.
Если для определения характера экстремума использовать дифференциал второго порядка, то рассуждения будут следующие. Для данной функции

Тогда

т. е. еще раз показано, что в точке  функция имеет минимум.
функция имеет минимум.
Ответ: 
Наибольшее и наименьшее значения функции двух переменных в замкнутой области
Рассмотрим некоторое множество  точек на плоскости.
точек на плоскости.
Напомним ряд следующих определений.
Точка  называется внутренней точкой множества
называется внутренней точкой множества  если она принадлежит этому множеству вместе с некоторой своей окрестностью.
если она принадлежит этому множеству вместе с некоторой своей окрестностью.
Точка  называется граничной точкой множества
называется граничной точкой множества  если в любой ее окрестности имеются точки как принадлежащие
если в любой ее окрестности имеются точки как принадлежащие  так и не принадлежащие этому множеству.
так и не принадлежащие этому множеству.
Совокупность всех граничных точек множества  называется его границей
называется его границей 
Множество  называется областью (открытым множеством), если все его точки внутренние.
называется областью (открытым множеством), если все его точки внутренние.
Множество с присоединенной границей  т. е.
т. е.  называется замкнутой областью.
называется замкнутой областью.
Область называется ограниченной, если она целиком содержится внутри круга достаточно большого радиуса.
Определение 22.1. Наибольшее или наименьшее значение функции в данной области называется абсолютным экстремумом (абсолютным максимумом или абсолютным минимумом) функции в этой области.
Теорема 22.1*. Абсолютный экстремум непрерывной функции  в области
в области  достигается либо в критической точке функции, принадлежащей этой области, либо в граничной точке области.
достигается либо в критической точке функции, принадлежащей этой области, либо в граничной точке области.
Пример №41
Найти наибольшее и наименьшее значения функции  в треугольной области
в треугольной области  с вершинами
с вершинами  и
и 
Решение.
Изобразим область графически, рис. 22.1. Найдем частные производные функции: 
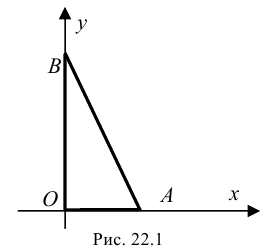
Определим ее критические точки из решения системы уравнений:
Таким образом, критической точкой функции является точка  принадлежащая области
принадлежащая области  Вычислим
Вычислим 
Исследуем поведение функции на границе области.
На отрезке  следовательно,
следовательно,  для всех точек отрезка. Имеем функцию одной переменной
для всех точек отрезка. Имеем функцию одной переменной 
Найдем производную для  и определим критические точки на данном отрезке из решения уравнения
и определим критические точки на данном отрезке из решения уравнения  Получаем,
Получаем,  Вычислим значение функции в точке
Вычислим значение функции в точке  Вычислим также значения функции на концах отрезка:
Вычислим также значения функции на концах отрезка: 
На отрезке  следовательно
следовательно  для всех точек отрезка. Имеем функцию одной переменной
для всех точек отрезка. Имеем функцию одной переменной 
Найдем производную для  и определим критические точки на данном отрезке из решения уравнения
и определим критические точки на данном отрезке из решения уравнения  Получаем
Получаем  Вычислим значение функции в точке
Вычислим значение функции в точке  Вычислим также значения функции на концах отрезка:
Вычислим также значения функции на концах отрезка:  (получено ранее),
(получено ранее), 
Рассмотрим отрезок  Он представляет собой часть прямой, проходящей через точки
Он представляет собой часть прямой, проходящей через точки  и
и  Получим уравнение данной прямой по формуле
Получим уравнение данной прямой по формуле  Имеем
Имеем

Таким образом, на отрезке  следовательно
следовательно 
Имеем функцию одной переменной  Найдем производную для
Найдем производную для 
 и определим критические точки на данном отрезке из решения уравнения
и определим критические точки на данном отрезке из решения уравнения  Получаем
Получаем  Вычислим значение функции в точке
Вычислим значение функции в точке  Значения функции на концах отрезка вычислены ранее.
Значения функции на концах отрезка вычислены ранее.
Сравнив все вычисленные значения функции, имеем  и
и 
Ответ:  и
и 
Условный экстремум ФНП
В ряде задач на поиск наибольших и наименьших значений ФНП переменные бывают связаны друг с другом некоторыми добавочными условиями. В этом случае говорят об условном экстремуме. Заметим, что необходимым условием разрешимости является то, что число уравнений обязательно меньше числа переменных.
Рассмотрим вопрос об условном экстремуме функции двух переменных, если переменные связаны одним условием.
Пусть требуется найти экстремумы функции
 (23.1)
(23.1)
при условии, что  и
и  связаны уравнением
связаны уравнением
 (23.2)
(23.2)
В определенных случаях данная задача может быть решена методом подстановки. Если удастся, например, разрешить уравнение (23.2) относительно  то, подставляя в (23.1) вместо
то, подставляя в (23.1) вместо  найденное выражение, получим функцию одной переменной
найденное выражение, получим функцию одной переменной  и тогда исходная задача будет сведена к задаче исследования на экстремум функции одной независимой переменной
и тогда исходная задача будет сведена к задаче исследования на экстремум функции одной независимой переменной  .
.
В случае, когда разрешить уравнение (23.2) не представляется возможным, используют другие методы. В частности, используется метод множителей Лагранжа.
Суть метода сводится к следующему: на основании исходной функции (23.1) и условия связи (23.2) строится вспомогательная функция Лагранжа

Функция  — функция трех переменных. Необходимым условием существования экстремума данной функции (в предположении, что исходные функции непрерывно дифференцируемы) является равенство нулю частных производных. Система для определения критических точек функции Лагранжа имеет вид:
— функция трех переменных. Необходимым условием существования экстремума данной функции (в предположении, что исходные функции непрерывно дифференцируемы) является равенство нулю частных производных. Система для определения критических точек функции Лагранжа имеет вид:
 или
или  (23.3)
(23.3)
Решения системы (23.3) определяют критические точки функции Лагранжа, а также — критические точки функции (23.1) при условии (23.2).
Достаточные условия условного экстремума связаны с изучением знака дифференциала второго порядка функции Лагранжа.
Теорема 23.1*. Пусть функции  и
и  определены и имеют непрерывные частные производные второго порядка в некоторой области
определены и имеют непрерывные частные производные второго порядка в некоторой области  Пусть точка
Пусть точка  — критическая точка функции
— критическая точка функции  причем
причем  Тогда, если при выполнении условий
Тогда, если при выполнении условий

 то в точке
то в точке  функция
функция  имеет условный максимум;
имеет условный максимум;  то в точке
то в точке  функция
функция  имеет условный минимум.
имеет условный минимум.
Теорема 23.2*. Пусть функции  и
и  определены и имеют непрерывные частные производные второго порядка в некоторой области
определены и имеют непрерывные частные производные второго порядка в некоторой области  Пусть точка
Пусть точка  — критическая точка функции
— критическая точка функции  причем
причем  Тогда если
Тогда если
то в точке  функция
функция  имеет условный максимум; если
имеет условный максимум; если  то в точке
то в точке  функция
функция  имеет условный минимум.
имеет условный минимум.
Заметим, что параметр  носит вспомогательный характер и в вычислении значений условных экстремумов не используется.
носит вспомогательный характер и в вычислении значений условных экстремумов не используется.
Пример №42
Найти экстремумы функции  при условии
при условии
Решение.
Преобразуем условие связи к виду (23.2): 
Составим функцию Лагранжа

Найдем частные производные функции Лагранжа:

Система для определения критических точек имеет вид:
Решив систему, получим:  и
и  . Для определения характера экстремума найдем частные производные второго порядка функции Лагранжа:
. Для определения характера экстремума найдем частные производные второго порядка функции Лагранжа:

Выполнение условия  означает:
означает:  тогда
тогда
Так как  то в точке
то в точке  исходная функция имеет условный минимум, причем
исходная функция имеет условный минимум, причем 
так как  то в точке
то в точке  исходная функция имеет условный максимум, причем
исходная функция имеет условный максимум, причем 
Для определения характера экстремума с использованием определителя, составим его в общем виде:
Так как  то в точке
то в точке  исходная функция имеет условный минимум, причем
исходная функция имеет условный минимум, причем  так как
так как  то в точке
то в точке  исходная функция имеет условный максимум, причем
исходная функция имеет условный максимум, причем 
Ответ: 
В случае если требуется найти экстремумы функции  переменных
переменных  при условии, что переменные
при условии, что переменные 
 связаны
связаны  уравнениями связи
уравнениями связи
составляется функция Лагранжа с  множителями
множителями 

Для определения критических точек необходимо решить систему из  уравнений:
уравнений:

Наличие и характер экстремума можно установить, используя дифференциал второго порядка функции Лагранжа.
Метод наименьших квадратов нахождения приближенной функциональной зависимости двух переменных
Пусть на основании наблюдений требуется установить функциональную зависимость показателя  от фактора
от фактора 
 (24.1)
(24.1)
Пусть в результате наблюдений получено  значений
значений  при соответствующих значениях фактора
при соответствующих значениях фактора  табл. 24.1.
табл. 24.1.
Таблица 24.1

Вид функции (24.1), называемой функцией регрессии, устанавливается или из теоретических соображений, или на основании характера расположения на координатной плоскости точек, соответствующих результатам наблюдений (поле корреляции).
При выбранном виде функции  где
где  -неизвестные параметры, остается подобрать их так, чтобы в каком-то смысле функция наилучшим образом описывала рассматриваемый процесс.
-неизвестные параметры, остается подобрать их так, чтобы в каком-то смысле функция наилучшим образом описывала рассматриваемый процесс.
Широко распространенным методом решения данной задачи является метод наименьших квадратов (МНК). Рассмотрим сумму квадратов разностей значений yt, полученных в результате наблюдений, и функции  в соответствующих точках:
в соответствующих точках:
 (24.2)
(24.2)
Подберем параметры  так, чтобы эта сумма имела наименьшее значение. Таким образом, задача сводится к нахождению таких значений параметров
так, чтобы эта сумма имела наименьшее значение. Таким образом, задача сводится к нахождению таких значений параметров  при которых функция
при которых функция  имеет минимум.
имеет минимум.
На основании необходимых условий экстремума ФНП получаем, что значения параметров  должны удовлетворять системе уравнений
должны удовлетворять системе уравнений
или 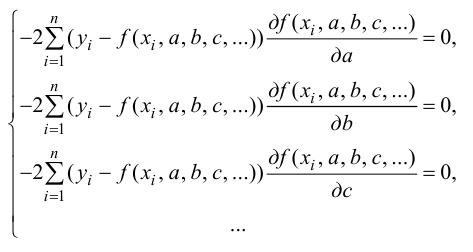 (24.3)
(24.3)
В системе (24.3) уравнений столько, сколько неизвестных параметров имеет функция (24.2).
Заметим, что вопрос о существовании решения системы уравнений (24.3) и существовании минимума функции (24.2) исследуется в каждом конкретном случае в зависимости от вида выбранной функции 
Случай линейной зависимости
Предположим, что между значениями фактора  и признака
и признака  существует линейная зависимость вида
существует линейная зависимость вида  Функция (24.2) в этом случае принимает вид:
Функция (24.2) в этом случае принимает вид:
 (24.4)
(24.4)
Это функция с двумя переменными  и
и  так как
так как  и
и  — заданные числа. Следовательно, система для определения критических точек функции (24.4) будет следующей:
— заданные числа. Следовательно, система для определения критических точек функции (24.4) будет следующей:
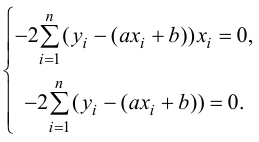
Откуда
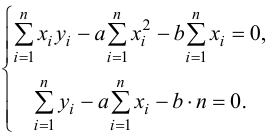
Так как неизвестными в данной системе являются  и
и  то удобнее привести ее к виду:
то удобнее привести ее к виду:
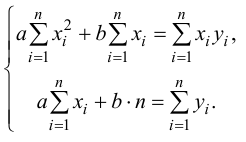 (24.5)
(24.5)
Заметим, что методом математической индукции можно доказать, что определитель матрицы коэффициентов системы (24.5),
при  положителен, т. е.
положителен, т. е. 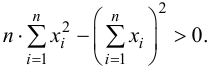 Это позволяет сделать вывод, что (24.5) имеет единственное решение. Получаем
Это позволяет сделать вывод, что (24.5) имеет единственное решение. Получаем
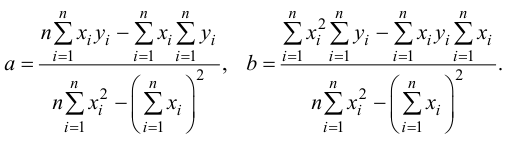 (24.6)
(24.6)
Покажем, что найденные значения параметров  и
и  определяют минимум функции (24.4). Для этого найдем частные производные второго порядка:
определяют минимум функции (24.4). Для этого найдем частные производные второго порядка:

Тогда  а это означает, что при найденных значениях параметров
а это означает, что при найденных значениях параметров  и
и  функция (24.4) имеет экстремум. Очевидно, что
функция (24.4) имеет экстремум. Очевидно, что  Значит, функция (24.4), при данных значениях
Значит, функция (24.4), при данных значениях  и
и  имеет единственную точку минимума.
имеет единственную точку минимума.
Случай квадратичной зависимости
Предположим, что между значениями фактора  и признака
и признака 
существует квадратичная зависимость вида:  Функция (24.2) в этом случае принимает вид:
Функция (24.2) в этом случае принимает вид:
Это функция трех переменных:  Система уравнений (24.3) принимает вид:
Система уравнений (24.3) принимает вид:
После преобразований, получаем
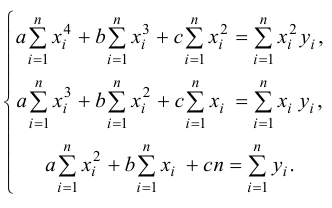
Получена система линейных уравнений для определения неизвестных  Можно доказать, что определитель этой системы отличен от нуля, следовательно, она будет иметь единственное решение. При полученных значениях параметров функция
Можно доказать, что определитель этой системы отличен от нуля, следовательно, она будет иметь единственное решение. При полученных значениях параметров функция  будет иметь минимум.
будет иметь минимум.
Случаи сведения функций к линейной. Выбор «лучшей» функции
Рассмотрим другие виды функций, используемых в экономических исследованиях и способы их сведения к линейной зависимости, табл. 24.2.
Таблица 24.2
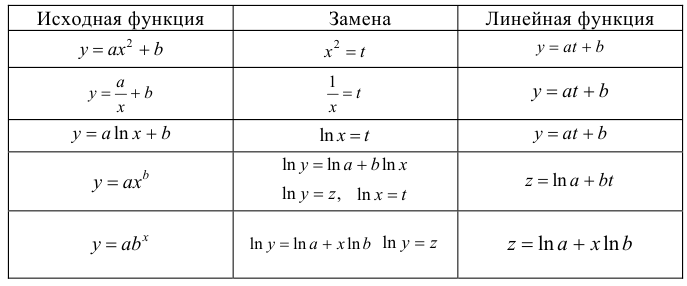
Для проверки адекватности построенной зависимости реальному поведению значений  и
и  можно использовать коэффициент аппроксимации МАРЕ:
можно использовать коэффициент аппроксимации МАРЕ:
 (24.7)
(24.7)
где  — значения функции регрессии, вычисленные по соответствующим значениям
— значения функции регрессии, вычисленные по соответствующим значениям 
В случае, если  полученная функция регрессии имеет высокую точность. Если
полученная функция регрессии имеет высокую точность. Если  точность функции регрессии хорошая (допустимая). При
точность функции регрессии хорошая (допустимая). При  точность полученной функции удовлетворительная, однако использование данной зависимости на практике спорно. При
точность полученной функции удовлетворительная, однако использование данной зависимости на практике спорно. При  точность неудовлетворительная и использование данной функции в анализе недопустимо.
точность неудовлетворительная и использование данной функции в анализе недопустимо.
В случае если при исследованиях зависимость  и
и  определили с помощью нескольких функций, то для выбора «лучшей» рассчитывают среднюю квадратичную ошибку
определили с помощью нескольких функций, то для выбора «лучшей» рассчитывают среднюю квадратичную ошибку
 (24.8)
(24.8)
где  — количество параметров полученной функции.
— количество параметров полученной функции.
Для дальнейших исследований обычно используют функцию с наименьшей квадратичной ошибкой.
Пример: В табл. 24.3 приведены данные о зависимости значений признака  от значений фактора
от значений фактора 
Таблица 24.3

Требуется:
1) построить функцию регрессии вида  оценить ее качество, найти среднюю квадратичную ошибку уравнения регрессии;
оценить ее качество, найти среднюю квадратичную ошибку уравнения регрессии;
2) построить функцию регрессии вида  оценить ее качество, найти среднюю квадратичную ошибку уравнения регрессии;
оценить ее качество, найти среднюю квадратичную ошибку уравнения регрессии;
3) сравнить полученные результаты и сделать вывод о возможности их использования в прогнозировании.
Решение.
Для построения функций регрессии будем использовать метод наименьших квадратов. Все расчеты будем выполнять с точностью до трех знаков после запятой.
1. В случае линейной регрессии  система для определения параметров
система для определения параметров  и
и  будет иметь вид (24.5).
будет иметь вид (24.5).
Все вспомогательные вычисления по определению постоянных коэффициентов данной системы представим в табл. 24.4.
Таблица 24.4
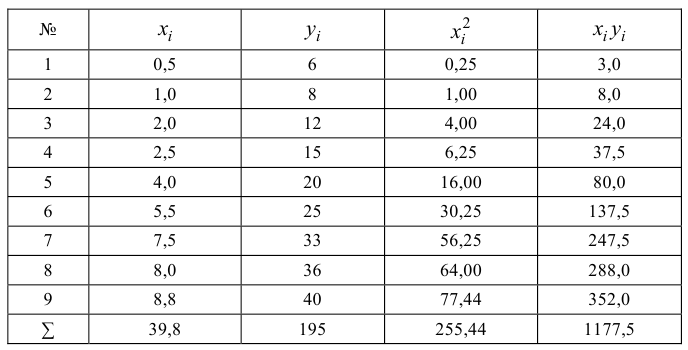
Система для определения параметров принимает вид:
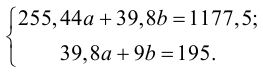
Воспользуемся формулами (24.6) и получим

Таким образом, в случае линейной зависимости, функция регрессии принимает вид 
Для оценки качества полученной функции регрессии будем использовать коэффициент аппроксимации МАРЕ (24.7), среднюю квадратичную ошибку рассчитаем по формуле (24.8). Все вспомогательные вычисления представим в табл. 24.5. Согласно расчетам, коэффициент аппроксимации  что соответствует высокой точности функции.
что соответствует высокой точности функции.
Средняя квадратичная ошибка составит 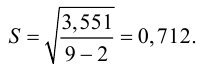
Таблица 24.5
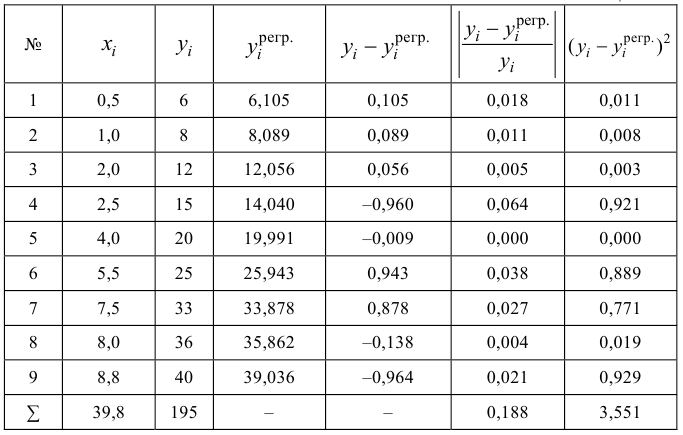
2. В случае зависимости вида  предварительно требуется выполнить замену
предварительно требуется выполнить замену  Выполнив все вспомогательные вычисления по определению постоянных коэффициентов получим систему:
Выполнив все вспомогательные вычисления по определению постоянных коэффициентов получим систему:
откуда  Таким образом, в случае квадратичной зависимости, функция регрессии принимает вид
Таким образом, в случае квадратичной зависимости, функция регрессии принимает вид 
Кроме того, в данном случае вычисления позволяют получить следующие результаты:
что соответствует допустимой точности функции регрессии; средняя квадратичная ошибка составит
3. Таким образом, функция регрессии  обладает высокой точностью, функция регрессии
обладает высокой точностью, функция регрессии  -допустимой точностью, а это означает, что использование первой функции обеспечит более достоверные результаты при прогнозировании. Средняя квадратичная ошибка для функции
-допустимой точностью, а это означает, что использование первой функции обеспечит более достоверные результаты при прогнозировании. Средняя квадратичная ошибка для функции  также меньше, чем для функции
также меньше, чем для функции 
Вывод. На основе данных о зависимости значений признака  от значений фактора
от значений фактора  были построены две функции регрессии:
были построены две функции регрессии:  и
и  В целях прогнозирования рекомендуется использовать зависимость вида
В целях прогнозирования рекомендуется использовать зависимость вида  так как она обладает высокой точностью соответствия исходным данным и меньшей средней квадратичной ошибкой функции регрессии.
так как она обладает высокой точностью соответствия исходным данным и меньшей средней квадратичной ошибкой функции регрессии.
- Комплексные числ
- Координаты на прямой
- Координаты на плоскости
- Линейная функция
- Знакопеременные ряды
- Степенные ряды
- Элементы матричного анализа
- Уравнение линии
6. Skjetne, Roger. Nonlinear Ship Manoeuvering Model: Identification and adaptive control with experiments for a model ship [Text] / Roger Skjetne, 0yvind N. Smogeli, Thor I. Fossen // Modelling, Identification and Control. — 2004. — Vol. 25, № 1. — pp. 3-27.
7. Casados, Manuel Haro. Identification of the nonlinear ship model parameters based on the turning test trial and the backstepping procedure [Text] / Manuel Haro Casados, Ramon Ferreiro // Ocean Engineering. — 2005. — vol. 32. — pp. 1350-1369.
8. Phillips, Alexander B. Evaluation of manoeuvring coefficients of a self-propelled ship using a blade element momentum propeller model coupled to a Reynolds averaged Navier Stokes flow solver [Text] / Alexander B. Phillips, Stephen R. Turnock, Maaten Furlong // Ocean Engineering. — 2009. — vol. 36. — pp. 1217-1225.
9. Олійник, П.Б. Побудова математичної моделі системи керування судном на основі ідентифікації параметрів судна з метою визначення законів керування [Текст] / П.Б. Олійник, В.М. Тєут // Системи управління, навігації та зв’язку, № 1(13), 2010. -с. 28-36.
10. Іванов, C.B. Автоматична ідентифікація параметрів судна / C.B. Іванов, П.Б. Олійник, В.М. Тєут [Текст] // Системи управління, навігації та зв’язку. — 2010. — № 4(16). — с. 6-11
11. Шейхот, А.К. Совершенствование систем управления морскими подвижными объектами на основе идентификации и адаптации: автореферат дисс… канд. техн. наук.: 05.22.19 / Шейхот Андрей Константинович; ФГОУ ВО «Морской государственный университет им. адм. Г. И. Невельского». — Владивосток, 2008. — 24 с.
12. Nomoto, K. On the steering qualities of ship [Text] / K. Nomoto, T. Taguchi, S. Hirano // International Shipbuilding Progress. — 1957. — vol.4, № 35. — p. 56-64.
13. Гроп, Д. Методы идентификации систем [Текст] / Д. Гроп — М., «Мир», 1979 — 302 с.
————————□ □—————————
Актуальність даної роботи полягає в тому, що результати роботи можуть бути покладені в основу написання інших робіт і застосовані в різних сферах діяльності. Подальше використання навичок, набутих в процесі написання даної роботи, можуть бути реалізовані в подальшому, при виконанні робіт, що стосуються побудови поверхонь
Ключові слова: Шерк, мінімальні поверхні, рівняння Лагранжа, циліндричні поверхні, теорема, катеноїд
□————————————□
Актуальность данной работы заключается в том, что результаты работы могут быть положены в основу написания других работ и применены в различных сферах деятельности. Последующее использование навыков, приобретенных в процессе написания данной работы, могут быть реализованы в дальнейшем, при выполнении работ, касающихся построения поверхностей
Ключевые слова: Шерк, минимальные поверхности, уравнение Лагранжа, цилиндрические поверхности, теорема, катеноид ————————□ □—————————
УДК 517.2+517.3+517.5(071)
МИНИМАЛЬНЫЕ ПОВЕРХНОСТИ
И. А. К и р н о з *
E-mail: inst@adidonntu.org.ua
Е. А. Королёв
Кандидат физико-математических наук, доцент Кафедра высшей математики* E-mail: inst@adidonntu.org.ua М. Е. Королёв
Кандидат физико-математических наук, доцент Кафедра прикладной математики и информатики* E-mail: inst@adidonntu.org.ua *Автомобильно-дорожный институт «Донецкий национальный технический университет» ул. Кирова, 51, г. Горловка, Украина, 84624
1. Введение
Исследования, о которых идёт речь в статье, относятся к области фундаментальных и прикладных аспектов математики и кибернетики. Актуальность рассматриваемой темы нашей статьи является обоснованной и нами доказанной, так как данная работа является составляющей процесса обучения в сфере минимальных поверхностей. В процессе написания статьи будут получены навыки работы с построением минимальных, цилиндрических поверхностей, а так же поверхностей переноса. Рациональное использование полученных знаний даст возможность
для дальнейшего исследования и написания других работ, касающихся построения поверхностей. Наша работа является наглядным пособием того, как знания
о минимальных поверхностях из одной области могут стать надёжным помощником во многих других отраслях нашей деятельности, в случае умелого использования приобретённых навыков.
2. Определение минимальной поверхности
Пусть М2 с Я3 — двумерная гладкая поверхность, где Я3 отнесено к декартовым координатам х, у, z.
© И. А. Кирноз, Е. А. Королёв, М. Е. Королёв, 2013
Пусть поверхность задается радиус-вектором г = г(и^) = {х(и^),у(и^)^(и^)} , (1)
где параметры и и V изменяются в некоторой области D на евклидовой плоскости, причем они определяют регулярные координаты в окрестности точки Р е М2. (рис. 1).
вид
I = Edu2 + 2Fdu + Gdv2;
4. Вторая квадратичная форма поверхности и средняя кривизна
Граница раздела двух сред, находящихся в равновесии, является поверхностью постоянной средней кривизны.
Для поверхности (1) вторая квадратичная форма записывается обычно в виде:
II = Ldu2 + 2Mdudv + Vdv2,
(4)
где
L = -(ruu,n), M = -(r„v,n), N = -(rw,n),
п = п(и^) — единичный вектор нормали к поверхности (рис. 1).
Обозначим матрицы I и II квадратичных форм соответственно
A=
EF
FG
и B =
LM
MN
Рис. 1. Двумерная гладкая поверхность
В этом случае первая квадратичная форма имеет
Тогда следующие две скалярные функции являются инвариантами относительно преобразования координат и являются важными геометрическими характеристиками и называются гауссовой и средней кривизнами соответственно.
(2)
K = detA-1B H = SpurA-1B
(5)
где
В данный момент особый интерес представляет для нас средняя кривизна
E = (ЛЛХ F = (ЛЛХ G = CWvX
а площадь поверхности М2 выражается двойным интегралом по области D задания параметров и и V по формуле:
S = JJVEG — F2dudv .
H = SpurA-1B = Spur
Spur
1
EG — F2
1 fG -F]
F E 1-F E ,
F G
-FM GM -FM
+EM — FM +EN
EG — F2
(3)
H=
Минимальная поверхность определяется следующим свойством:если на поверхности М2 взять любую достаточно малую область с границей Г, то площадь этой области будет наименьшей среди всех гладких поверхностей с этой границей.
3. Эксперименты Плато с мыльными пленками
Когда бельгийский физик Плато (1801-1883 г.г.) начал опыты по изучению конфигурации мыльных пленок, он вряд ли предполагал, что они послужат толчком к возникновению значительного научного направления, бурно развивающегося до настоящего времени и известного сегодня под общим названием проблема Плато. В 1866 году Плато установил, что если погрузить в мыльный раствор замкнутый контур Г (например, из проволоки), то после его извлечения оттуда образуется поверхность М2 минимальной площади по сравнению с любой другой поверхностью, которую можно натянуть на этот контур, т.е. минимальная поверхность.
GL — 2FM + EN EG — F2
(6)
Важный шаг в понимании внутренней геометрии поверхностей раздела сред был сделан Пуассоном, который в 1828 году показал, что поверхность раздела двух сред, находящаяся в равновесии (при условии, что мы пренебрегаем силой тяжести), является поверхностью постоянной средней кривизны.
Пуассон доказал, что если двумерная гладкая поверхность М2 с Я3 является границей раздела двух сред, находящихся в равновесии, то средняя кривизна Н поверхности постоянна и равна
H = h(p — P2)
(7)
1
где постоянная Х = — называется коэффициентом по-Ь
верхностного натяжения, Р1 и Р2 — давления в средах, а Р1 — Р2 — разность давления в средах.
Особый интерес представляет случай мыльной пленки, натянутой на проволочный контур L. Здесь разности давлений с обеих сторон пленки нет. Сле-
Е
довательно, давление на одну сторону пленки совпадает с давлением на противоположную её сторону в окрестности каждой точки на поверхности. Здесь H = h(P4 — P2) = const = 0. Итак, равнодействующая сил равна нулю, а поэтому средняя кривизна пленки, как минимальной поверхности, равна нулю.
Равенство нулю средней кривизны H для минимальных поверхностей доказал Менье еще в 1776 году в мемуаре ”О кривизне поверхности”. В большинстве работ XIX века и в настоящее время минимальные поверхности определялись и изучались именно исходя из равенства Н = 0 . Мы также будем иметь в виду именно это определение.
GL — 2FM + EN = О.
(ІО)
Подставим в (10) выражения для E, F, G, L, M, N получим
ZZ (1 + Z2)(—, uu )-2Z Z (——
V v/v fZToZTo u vV
+(1+Zu)(-
Откуда
Vzu+Z2+1 ‘
Z
)+
Vzu+z2+і
)=О.
(l+z2)zuu — 2zuZvZ„v+(l+zu)zw=О.
5. Уравнение Лагранжа
Рассмотрим минимальные поверхности вида
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
Z = Z(x,y),
(8)
т.е. поверхности, для которых Н = 0.
Перейдем к параметрическому заданию поверхности (8). Для этого положим X = Х(и) = и, Y = Y(v) = V тогда Z = Z(x(u),y(v)) = Z(u,v) и поверхность (8) можно задать в следующем параметрическом виде вектор — функцией
Учитывая, что u = x, v = ф , последнее уравнение примет вид
(1 + Zф)Zxx — 2ZxZlfZ^ + (1+ Z^ = О.
‘х’ фф
(ІІ)
Уравнение (11) называется уравнением Лагранжа. Это нелинейное уравнение второго порядка в частных производных было получено Лагранжем в 1760 году при минимизации площади поверхности z = z(x,у) .
Используем уравнение Лагранжа для нахождения отдельных минимальных поверхностей.
‘ = r(u,v) = {u, v, z, (u,v)}.
(9)
6. Минимальные поверхности вращения
Вычислим коэффициенты первой и второй квадратичных форм поверхности (9)
Т.к.
ги = {1 0 ^ }, г; = {0 1 ^ } ,
Гии={0 0 Z1Ш }, Е={0 0 Zw } , ZЦ; = {0 0 ZЦ;} ,
Пусть кривая X = х(и)Д = z(u) , принадлежащая плоскости XOZ вращается вокруг оси OZ. Тогда уравнение полученной поверхности вращения будет иметь вид
x = x(u) cos v y = x(u)sinv . z = z(u)
Исключая параметры u и v из (12), получим
(І2)
E = (ru,ru) = 1 + Z2u , F = (ru,0 = ZuZv, G = (Г2,Г2) = 1 + Z2v ,
Z = Z(x2 + y2).
Воспользуемся полярными координатами
(13)
r +r n = 7^^ =
i j k І О Zu О 1 Z„
-Zui — Zvj + k
Zu + Zv V(-Zu)2 — (-Zv)2 + 1
. -Zui — Zvj + k
‘ n/zu+zv+1 ’
L = -(ruu,n) = —
N = -(rw,n) = —
Vzu+zv+1
zvv
Vzu+zv+1.
Vzu+zv+1 ’
x = rcosф, y = rsinф, r = Jx2 + y2, y = arctgy. (14)
x
Легко найти следующие соотношения:
x rcos ф y . ,
rx = ) „ „ =——= cosф, ry = . = sinф,
•y/x2 + y2
-y/x2 + y2
Фx = — *(4) = -^ = -^ = -“*, (15)
І + (-У
x
y)2 x2 x2 + y2 r2
ф, =
1 g 1 x rcos ф cos ф
y y)2 x x2 + y2
1+(-)2 x
Так как функция Z = Z(r2) не зависит от ф , то
и так как H = О , то из (6) следует, что
Zф= О.
(16)
ru + rv
r
Z
Z
uu
uv
r
r
С учетом (15) и (16) имеем:
Zx = Zrrx + Ефх = ZrC0S ф,
Zy = Zrry + ^ф = ZrSin i
Zxx = (Zx )x = (Zr C0sф)х = (Zr C0sФ)гГх + (Zr C0sф)ффх =
: Zrr cos ф + Z
2 sin2 ф
(І7)
1+P:
2 = c2r2; —г +1 = c2r2; —r = c2r2 -1;
P2 P2 P2
P2 =
c2r2 -І
’ P=±.
c2r2 -І
Поверхность симметрична относительно плоскости Z = 0 , поэтому возьмем верхнюю часть, для которой 1
P=
І
c2r2 -1 Vc2r2 — і
Zxy = (Zx )ф = (Zr cos ф)2ф + (Zr cos ф)ффф =
= Zrrcos ф sin ф- Zr
sin ф cos ф
Zyy = (Zф )ф = (Zr cos ф)ф = (Zr cos ф)ггф + (Zr cos ф)ффф =
2 cos2 ф
= Zrrsin ф + Zr————-,
Так как P = —, то dr
dz
І dr І d(rc)
г; dz = — —
dr Vc2r2 — i’ Vc2r2 -1 ^(cr)2 -1 ’
f dz = — f ,d(cr) ’ Z = -ln+ Icr Wc2r2 — — + c,.
J ^.^cry1- cl Iі
(І9)
Используя соотношение (17), уравнение Лагранжа (11) примет вид
2 sin2 ф 2 2
(Zrrcos ф + Zr-)(1+ Zr sin ф) —
r
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
-2(ZrrCos ф sin ф-)*
где с1 — постоянная, которую можно положить равную нулю, т.к. этого всегда можно добиться сдвигом на постоянную величину всей поверхности вдоль оси OZ.
Из уравнения (19)следует
І
ecz = cz + Vc2r2 — і,
cr Wc2r2 -1
*(1 + Zr cos ф)(1 + Zrsin ф) +
+(Zrr sin2 ф + Zr ) *(1 + Z2 cos2 ф) = 0 r
После несложных преобразований, получим 3 1
Zrr + (Zr + Z3)*- = 0.
r
Найдем решение этого уравнения. Имеем
Z
І
Zr + Z3 r
(І8)
dP
Положим Zг = Р, тогда Zгг = Рг = — и уравнение
dг
(18) примет вид
dP =-йг; г dP г ^
Р(1+р2)=-Т’ г Р(1+р2)=-г т 1 1 Р
Так как ——^ =—=-, то
Р(1 + Р2) Р 1+Р2
Складывая полученные уравнения, имеем
Vcv^
c2r2 + 2crVc2r2 — і + c2r2 — і + і
cr + уіc2r2 — і
= 2cr.
Таким образом
———= cr,
2
откуда
chcz = cr или chcz = c^x2 + y2.
(2О)
Уравнение (20) является уравнением катеноида, т.е. поверхности, полученной вращением цепной линии вокруг оси 0Z, (рис. 2).
f (———-~2)dP = -f
P І + P2
dr
x = -chcz. c
(2І)
lnP-^ln(1 + P2) = -lnr — lnc, где С — постоянная.
Разрешим это уравнение относительно Р.
P , 1 P 1 V-+P2″
ln і—-= = In—; , =—; ——-= cr;
Vi+P2 cr Vi + P2 cr P
Действительно, уравнение (21) можно записать в следующем виде
сЬ = chcz,
откуда
z = — archcz .
c
-уз
І
І
r
r
r
r
r
Или в параметрическом виде
(22)
где С — параметр.
Вращая кривую (22) вокруг OZ, получим уравнение катеноида в параметрическом виде
х = rcos ф у = г sin ф .
z = ^агсЬсг с
(23)
х = rcosф у = тп ф , z = 2(ф)
где криволинейными координатами фи г служат полярные координаты.
Выделим из этого класса минимальные поверхности, т.е. те поверхности, которые удовлетворяют уравнению Лагранжа (11).
Используя (14), для поверхностей вида (24) запишем
sin ф _ cos ф
х = 7ф ’ 7у = 2ф ,
Исключая параметры z и у, получим уравнение катеноида
7 = иПФ 27 cosфsinф
7хх = 2фф 2 27ф 2
г г
z = ^агсЬсг^х2 + у2
sin ф cos ф cos2ф 7 sin2ф
7ху = -7фф———г————2 ф—2———7ф—
у г г г
в явном виде, или
сЬс2 = с^/х2 + у2 —
= сс^-2 sin ф cos ф
2уу 2фф 2 2ф 2
х = 2
г
г
в неявном виде.
Используя эти соотношения, находим, что уравнение Лагранжа (11) приобретает для таких поверхностей особенно простой вид ^ф=0.
Дважды интегрируя это уравнение, получим
Z = кф + с, (25)
где к и с — постоянные.
Константу С можно положить равную нулю, т.к. этого всегда можно добиться сдвигом на эту постоянную величину всей поверхности вдоль оси ОZ.
Учитывая (25), поверхность (24) примет вид
Рис. 2. Поверхность, полученная вращением цепной линии
11
Так как при z = 0 функция х = — сЬ^ равна —, то
сс радиус окружности пересечения катеноида с плоскос-
1
тью z = 0 равен —.
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
с
Таким образом, единственной поверхностью вращения, удовлетворяющей уравнению Лагранжа, т.е. являющейся минимальной поверхностью вращения, есть катеноид (20).
х = rcosф у = ф .
2 = гф
(26)
Исключая параметры фи г, получим уравнение поверхности в явном виде
2 = к■ агС^у , х
(27)
7. Минимальные поверхности в классе поверхностей вида
Z= Z(ф).
Рассмотрим класс поверхностей вида
которая называется геликоидом — поверхность, образованная прямой линией, которая вращается вокруг оси OZ и одновременно движется параллельно ей (винтовая поверхность).
Таким образом, единственной минимальной поверхностью класса (24) является геликоид (27) (винтовая поверхность).
8. Минимальные поверхности переноса
——^Т~ (!+*82ау) — 2 *0(-tgax) tgay + —а— (1+tg2ax) =
со82ахч ‘ со82ауч ‘
Поверхностью переноса называют поверхность, полученную в результате движения кривой г1 = г1(и) без деформации вдоль другой кривой г2 = г2(и) .
Поверхности переноса можно задать в следующем векторном виде
2 2 2 2 со^ ах со^ ау со^ ах со^ ах
г = г(и^) = г1(и)+r2(v) .
(28)
9. Минимальные цилиндрические поверхности
Известна следующая теорема
Теорема. Единственной минимальной поверхностью переноса является поверхность Шерке
г = г(и^)1 •jarccosu,arccosv,lnU- , а [ V |
г1(и)= — {агсоми, 0, 1пи} ,
_ І
2^) = — {0, О 1
г,^)= —-І0, arccosv, -lnv} . а
Поверхность, образованная прямыми, параллельными заданной прямой 1 и пересекающими заданную кривую Ь, называется цилиндрической поверхностью (или цилиндром) (рис. 3).
(29
То, что поверхность (29) является поверхностью переноса, следует из того, что ее можно представить в виде (28), где
1
или в параметрическом виде
Рис. 3. Цилиндрическая поверхность
х = — ага^и а
у = — arccosv. а
-1 и
2 = — ІП —
(30)
Исключая параметры и и ; в уравнении (30), приходим к явному заданию поверхности Шерке
Кривую L называют направляющей цилиндра. Прямые, которые образуют цилиндр, называют образующими цилиндра.
Теорема. Единственной минимальной цилиндрической поверхностью является плоскость.
Доказательство. То, что плоскость является минимальной поверхностью следует из того, что функция (32) удовлетворяет уравнению Лагранжа (11).
2 = ах + Ьу + с .
(32)
1, cosax
ъ = — 1п———
а cos ау
(31)
Покажем, что поверхность (31) удовлетворяет уравнению Лагранжа (11), т.е. является минимальной поверхностью.
Действительно, из уравнения (31) следует
7 = 1 cosax 7=
а cosay
7 = 1 cosax 7у =
asin ах
cosay
= ^ах,
а cos ау
cosax
cos ау
(-asinay)
= tgay,
7_ = —
а
cos ау
, 7 = 0.
ху
Подставим полученные значения в уравнение Лагранжа (11), получим
Так как любую цилиндрическую поверхность можно получить перемещением направляющей L вдоль любой ее образующей, то цилиндрические поверхности являются поверхностями переноса. А так как единственной минимальной поверхностью переноса является поверхность Шерке (рис. 4), которая не есть цилиндрическая поверхность, то из этого следует справедливость теоремы.
Рис. 4. Поверхность Шерка
1
1
а
а
*
1
1
а V
а
l0. Выводы
Данная работа является составляющей процесса обучения. В процессе выполнения работы были получены навыки работы с построением минимальных, цилиндрических поверхностей, а так же поверхностей переноса. Рациональное использование полученных
знаний дает возможность для дальнейшего исследования и написания других работ, касающихся построения поверхностей. Наша работа является наглядным пособием того, как знания о минимальных поверхностях из одной области могут стать надёжным помощником во многих других отраслях нашей деятельности, в случае умелого использования приобретённых навыков.
Литература
1. Минимальные поверхности [Текст] : довідник / Г. Кархер, Л. Саймон, Х. Фудзимото, С. Хильдебрандт, Д. Хоффман, 2ООЗ. -З52 с.
2. Павленко Ю.Г. Лекции по теоретической механике [Текст] / Ю.Г. Павленко, 2ОО2.
3. Перельман, Я. И. Занимательная физика [Текст] / Я. И. Перельман. — Книга 1: ЛитРес, 2ОО9.
4. Элементы большой науки [Электронный ресурс]. — Режим доступа: www/ URL: http://elementy.ш/news/430564/ -1О.ОЗ.2О1З г. —
Загл. с экрана.
5. Большая Советская Энциклопедия, БСЭ [Электронный ресурс]. — Режим доступа: www/ URL: http://bse.sd-Hb.com/aгtide076-681.html/ — 1О.ОЗ.2О1З г. — Загл. с экрана.
6. Литературный интернет-журнал «Русский переплёт» [Электронный ресурс]. — Режим доступа: http://www.pereplet.ru/obrazovan-ie/stsoros /9W.html/ — 1О.ОЗ.2О1З г. — Загл. с экрана.
7. Академик [Электронный ресурс]. — Режим доступа: www/ URL: http://dic.academic.ru/dic.nsf/ruwiki/115741З/ -1О.ОЗ.2О1З г. -Загл. с экрана.
8. Большая Советская Энциклопедия, БСЭ [Электронный ресурс]. — Режим доступа: www/ URL: http://bse.sci-lib.com/aгticle068-272.html/ — 1О.ОЗ.2О1З г. — Загл. с экрана.
9. NAUKOVED.RU [Электронный ресурс]. — Режим доступа: www/ URL: http://naukoved.ru/content/view/890/44/—1О.ОЗ.2О1З г. -Загл. с экрана.
10. Астронет [Электронный ресурс]. — Режим доступа: www/ URL: wwwmath.msu.ru/content_root/programs/kaf/special/…/minpov-fom.doc/ — 1О.ОЗ.2О1З г. — Загл. с экрана.
11. Прикладная математика. Справочник математических формул. Примеры и задачи с решениями [Электронный ресурс]. — Режим доступа: www/ URL: http://www.pm298.ru/spec29.php/ — 1О.ОЗ.2О1З г. — Загл. с экрана.
——————-□ □———————-
У роботі розглянута модель автоматичного проектування раціональних схем розкрою листових матеріалів на деталі взуття. На основі теоретичних висновків, які висвітлюються в даній роботі, розроблена програма в середовищі програмування БеІрШі
Ключові слова: модель, проектування, задача, методи, алгоритми, годограф, вектор, розкрій, програма, САПР
□———————————□
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
В работе рассмотрена модель автоматического проектирования рациональных схем раскроя листовых материалов на детали обуви. На основе теоретических выводов, освещаемых в данной работе, разработана программа в среде программирования БеІрШі Ключевые слова: модель, методы, алгоритмы, годограф, вектор, раскрой, программа, САПР
——————-□ □———————-
УДК 685.З
АВТОМАТИЧНЕ ПРОЕКТУВАННЯ РАЦІОНАЛЬНИХ СХЕМ РОЗКРОЮ ЛИСТОВИХ МАТЕРІАЛІВ НА ДЕТАЛІ
ВЗУТТЯ
Т. М. Гаврилов
Аспірант
Відкритий міжнародний університет розвитку людини
«Україна»
вул. Львівська, 23, м. Київ, Україна, 03115 E-mail: tarasgavrilov@gmail.com
l. Вступ
Сучасні виробництва не зможуть вижити в конкурентній боротьбі, якщо не будуть випускати нову у виробництво.
продукцію кращої якості, більш низької вартості за менший час.
А це можна досягти завдяки впровадження САПР
©
Минимальная поверхность
Материал из online Интернет-энциклопедии для сайта Infoteach.ru
Минимальная поверхность — поверхность, у которой средняя кривизна  равна нулю во всех точках; представитель класса изотермических поверхностей. Примеры таких поверхностей — геликоид, катеноид.
равна нулю во всех точках; представитель класса изотермических поверхностей. Примеры таких поверхностей — геликоид, катеноид.
История
Первые исследования минимальных поверхностей восходят к Лагранжу (1768), который рассмотрел следующую вариационную задачу: найти поверхность наименьшей площади, натянутую на данный контур. Предполагая искомую поверхность задаваемой в виде  , Лагранж получил, что эта функция должна удовлетворять уравнению Эйлера — Лагранжа.
, Лагранж получил, что эта функция должна удовлетворять уравнению Эйлера — Лагранжа.
Позже Монж (1776) обнаружил, что условие минимальности площади приводит к условию  , и поэтому за поверхностями с закрепилось название «минимальные». В действительности, однако, нужно различать понятия минимальной поверхности и поверхности наименьшей площади, так как условие представляет собой лишь необходимое условие минимальности площади, вытекающее из равенства нулю 1-й вариации площади поверхности среди всех поверхностей с заданной границей. Для проверки достижения в указанном классе хотя бы относительного (локального) минимума приходится исследовать вторую вариацию площади поверхности.
, и поэтому за поверхностями с закрепилось название «минимальные». В действительности, однако, нужно различать понятия минимальной поверхности и поверхности наименьшей площади, так как условие представляет собой лишь необходимое условие минимальности площади, вытекающее из равенства нулю 1-й вариации площади поверхности среди всех поверхностей с заданной границей. Для проверки достижения в указанном классе хотя бы относительного (локального) минимума приходится исследовать вторую вариацию площади поверхности.
Смотри также
- Формула монотонности
Ссылки
- Евгений Степанов Видео-лекции: минимальные поверхности (рус.)
From Wikipedia, the free encyclopedia

A helicoid minimal surface formed by a soap film on a helical frame
In mathematics, a minimal surface is a surface that locally minimizes its area. This is equivalent to having zero mean curvature (see definitions below).
The term «minimal surface» is used because these surfaces originally arose as surfaces that minimized total surface area subject to some constraint. Physical models of area-minimizing minimal surfaces can be made by dipping a wire frame into a soap solution, forming a soap film, which is a minimal surface whose boundary is the wire frame. However, the term is used for more general surfaces that may self-intersect or do not have constraints. For a given constraint there may also exist several minimal surfaces with different areas (for example, see minimal surface of revolution): the standard definitions only relate to a local optimum, not a global optimum.
Definitions[edit]

Saddle tower minimal surface. While any small change of the surface increases its area, there exist other surfaces with the same boundary with a smaller total area.
Minimal surfaces can be defined in several equivalent ways in R3. The fact that they are equivalent serves to demonstrate how minimal surface theory lies at the crossroads of several mathematical disciplines, especially differential geometry, calculus of variations, potential theory, complex analysis and mathematical physics.[1]
- Local least area definition: A surface M ⊂ R3 is minimal if and only if every point p ∈ M has a neighbourhood, bounded by a simple closed curve, which has the least area among all surfaces having the same boundary.
This property is local: there might exist regions in a minimal surface, together with other surfaces of smaller area which have the same boundary. This property establishes a connection with soap films; a soap film deformed to have a wire frame as boundary will minimize area.
- Variational definition: A surface M ⊂ R3 is minimal if and only if it is a critical point of the area functional for all compactly supported variations.
This definition makes minimal surfaces a 2-dimensional analogue to geodesics, which are analogously defined as critical points of the length functional.

Minimal surface curvature planes. On a minimal surface, the curvature along the principal curvature planes are equal and opposite at every point. This makes the mean curvature zero.
- Mean curvature definition: A surface M ⊂ R3 is minimal if and only if its mean curvature is equal to zero at all points.
A direct implication of this definition is that every point on the surface is a saddle point with equal and opposite principal curvatures. Additionally, this makes minimal surfaces into the static solutions of mean curvature flow. By the Young–Laplace equation, the mean curvature of a soap film is proportional to the difference in pressure between the sides. If the soap film does not enclose a region, then this will make its mean curvature zero. By contrast, a spherical soap bubble encloses a region which has a different pressure from the exterior region, and as such does not have zero mean curvature.
- Differential equation definition: A surface M ⊂ R3 is minimal if and only if it can be locally expressed as the graph of a solution of

The partial differential equation in this definition was originally found in 1762 by Lagrange,[2] and Jean Baptiste Meusnier discovered in 1776 that it implied a vanishing mean curvature.[3]
- Energy definition: A conformal immersion X: M → R3 is minimal if and only if it is a critical point of the Dirichlet energy for all compactly supported variations, or equivalently if any point p ∈ M has a neighbourhood with least energy relative to its boundary.
This definition ties minimal surfaces to harmonic functions and potential theory.
- Harmonic definition: If X = (x1, x2, x3): M → R3 is an isometric immersion of a Riemann surface into 3-space, then X is said to be minimal whenever xi is a harmonic function on M for each i.
A direct implication of this definition and the maximum principle for harmonic functions is that there are no compact complete minimal surfaces in R3.
- Gauss map definition: A surface M ⊂ R3 is minimal if and only if its stereographically projected Gauss map g: M → C ∪ {∞} is meromorphic with respect to the underlying Riemann surface structure, and M is not a piece of a sphere.
This definition uses that the mean curvature is half of the trace of the shape operator, which is linked to the derivatives of the Gauss map. If the projected Gauss map obeys the Cauchy–Riemann equations then either the trace vanishes or every point of M is umbilic, in which case it is a piece of a sphere.
The local least area and variational definitions allow extending minimal surfaces to other Riemannian manifolds than R3.
History[edit]
Minimal surface theory originates with Lagrange who in 1762 considered the variational problem of finding the surface z = z(x, y) of least area stretched across a given closed contour. He derived the Euler–Lagrange equation for the solution

He did not succeed in finding any solution beyond the plane. In 1776 Jean Baptiste Marie Meusnier discovered that the helicoid and catenoid satisfy the equation and that the differential expression corresponds to twice the mean curvature of the surface, concluding that surfaces with zero mean curvature are area-minimizing.
By expanding Lagrange’s equation to

Gaspard Monge and Legendre in 1795 derived representation formulas for the solution surfaces. While these were successfully used by Heinrich Scherk in 1830 to derive his surfaces, they were generally regarded as practically unusable. Catalan proved in 1842/43 that the helicoid is the only ruled minimal surface.
Progress had been fairly slow until the middle of the century when the Björling problem was solved using complex methods. The «first golden age» of minimal surfaces began. Schwarz found the solution of the Plateau problem for a regular quadrilateral in 1865 and for a general quadrilateral in 1867 (allowing the construction of his periodic surface families) using complex methods. Weierstrass and Enneper developed more useful representation formulas, firmly linking minimal surfaces to complex analysis and harmonic functions. Other important contributions came from Beltrami, Bonnet, Darboux, Lie, Riemann, Serret and Weingarten.
Between 1925 and 1950 minimal surface theory revived, now mainly aimed at nonparametric minimal surfaces. The complete solution of the Plateau problem by Jesse Douglas and Tibor Radó was a major milestone. Bernstein’s problem and Robert Osserman’s work on complete minimal surfaces of finite total curvature were also important.
Another revival began in the 1980s. One cause was the discovery in 1982 by Celso Costa of a surface that disproved the conjecture that the plane, the catenoid, and the helicoid are the only complete embedded minimal surfaces in R3 of finite topological type. This not only stimulated new work on using the old parametric methods, but also demonstrated the importance of computer graphics to visualise the studied surfaces and numerical methods to solve the «period problem» (when using the conjugate surface method to determine surface patches that can be assembled into a larger symmetric surface, certain parameters need to be numerically matched to produce an embedded surface). Another cause was the verification by H. Karcher that the triply periodic minimal surfaces originally described empirically by Alan Schoen in 1970 actually exist. This has led to a rich menagerie of surface families and methods of deriving new surfaces from old, for example by adding handles or distorting them.
Currently the theory of minimal surfaces has diversified to minimal submanifolds in other ambient geometries, becoming relevant to mathematical physics (e.g. the positive mass conjecture, the Penrose conjecture) and three-manifold geometry (e.g. the Smith conjecture, the Poincaré conjecture, the Thurston Geometrization Conjecture).
Examples[edit]
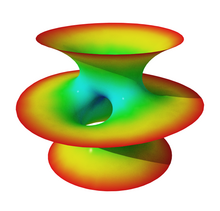
Classical examples of minimal surfaces include:
- the plane, which is a trivial case
- catenoids: minimal surfaces made by rotating a catenary once around its directrix
- helicoids: A surface swept out by a line rotating with uniform velocity around an axis perpendicular to the line and simultaneously moving along the axis with uniform velocity
Surfaces from the 19th century golden age include:
- Schwarz minimal surfaces: triply periodic surfaces that fill R3
- Riemann’s minimal surface: A posthumously described periodic surface
- the Enneper surface
- the Henneberg surface: the first non-orientable minimal surface
- Bour’s minimal surface
- the Neovius surface: a triply periodic surface
Modern surfaces include:
- the Gyroid: One of Schoen’s surfaces from 1970, a triply periodic surface of particular interest for liquid crystal structure
- the Saddle tower family: generalisations of Scherk’s second surface
- Costa’s minimal surface: Famous conjecture disproof. Described in 1982 by Celso Costa and later visualized by Jim Hoffman. Jim Hoffman, David Hoffman and William Meeks III then extended the definition to produce a family of surfaces with different rotational symmetries.
- the Chen–Gackstatter surface family, adding handles to the Enneper surface.
Generalisations and links to other fields[edit]
Minimal surfaces can be defined in other manifolds than R3, such as hyperbolic space, higher-dimensional spaces or Riemannian manifolds.
The definition of minimal surfaces can be generalized/extended to cover constant-mean-curvature surfaces: surfaces with a constant mean curvature, which need not equal zero.
The curvature lines of an isothermal surface form an isothermal net.[4]
In discrete differential geometry discrete minimal surfaces are studied: simplicial complexes of triangles that minimize their area under small perturbations of their vertex positions.[5] Such discretizations are often used to approximate minimal surfaces numerically, even if no closed form expressions are known.
Brownian motion on a minimal surface leads to probabilistic proofs of several theorems on minimal surfaces.[6]
Minimal surfaces have become an area of intense scientific study, especially in the areas of molecular engineering and materials science, due to their anticipated applications in self-assembly of complex materials.[7] The endoplasmic reticulum, an important structure in cell biology, is proposed to be under evolutionary pressure to conform to a nontrivial minimal surface.[8]
In the fields of general relativity and Lorentzian geometry, certain extensions and modifications of the notion of minimal surface, known as apparent horizons, are significant.[9] In contrast to the event horizon, they represent a curvature-based approach to understanding black hole boundaries.

Circus tent approximates a minimal surface.
Structures with minimal surfaces can be used as tents.
Minimal surfaces are part of the generative design toolbox used by modern designers. In architecture there has been much interest in tensile structures, which are closely related to minimal surfaces. Notable examples can be seen in the work of Frei Otto, Shigeru Ban, and Zaha Hadid. The design of the Munich Olympic Stadium by Frei Otto was inspired by soap surfaces.[10] Another notable example, also by Frei Otto, is the German Pavilion at Expo 67 in Montreal, Canada.[11]
In the art world, minimal surfaces have been extensively explored in the sculpture of Robert Engman (1927–2018), Robert Longhurst (1949– ), and Charles O. Perry (1929–2011), among others.
See also[edit]
- Bernstein’s problem
- Bilinear interpolation
- Bryant surface
- Curvature
- Enneper–Weierstrass parameterization
- Harmonic map
- Harmonic morphism
- Plateau’s problem
- Schwarz minimal surface
- Soap bubble
- Surface Evolver
- Stretched grid method
- Tensile structure
- Triply periodic minimal surface
- Weaire–Phelan structure
References[edit]
- ^ Meeks, William H., III; Pérez, Joaquín (2011). «The classical theory of minimal surfaces». Bull. Amer. Math. Soc. 48 (3): 325–407. doi:10.1090/s0273-0979-2011-01334-9. MR 2801776.
- ^ J. L. Lagrange. Essai d’une nouvelle methode pour determiner les maxima et les minima des formules integrales indefinies. Miscellanea Taurinensia 2, 325(1):173{199, 1760.
- ^ J. B. Meusnier. Mémoire sur la courbure des surfaces. Mém. Mathém. Phys. Acad. Sci. Paris, prés. par div. Savans, 10:477–510, 1785. Presented in 1776.
- ^ «Isothermal surface — Encyclopedia of Mathematics». encyclopediaofmath.org. Retrieved 2022-09-04.
- ^ Pinkall, Ulrich; Polthier, Konrad (1993). «Computing Discrete Minimal Surfaces and Their Conjugates». Experimental Mathematics. 2 (1): 15–36. doi:10.1080/10586458.1993.10504266. MR 1246481.
- ^ Neel, Robert (2009). «A martingale approach to minimal surfaces». Journal of Functional Analysis. 256 (8): 2440–2472. arXiv:0805.0556. doi:10.1016/j.jfa.2008.06.033. MR 2502522. S2CID 15228691.
- ^ Han, Lu; Che, Shunai (April 2018). «An Overview of Materials with Triply Periodic Minimal Surfaces and Related Geometry: From Biological Structures to Self-Assembled Systems». Advanced Materials. 30 (17): 1705708. doi:10.1002/adma.201705708. PMID 29543352. S2CID 3928702.
- ^ Terasaki, Mark; Shemesh, Tom; Kasthuri, Narayanan; Klemm, Robin W.; Schalek, Richard; Hayworth, Kenneth J.; Hand, Arthur R.; Yankova, Maya; Huber, Greg (2013-07-18). «Stacked endoplasmic reticulum sheets are connected by helicoidal membrane motifs». Cell. 154 (2): 285–296. doi:10.1016/j.cell.2013.06.031. ISSN 0092-8674. PMC 3767119. PMID 23870120.
- ^ Yvonne Choquet-Bruhat. General relativity and the Einstein equations. Oxford Mathematical Monographs. Oxford University Press, Oxford, 2009. xxvi+785 pp. ISBN 978-0-19-923072-3 (page 417)
- ^ «AD Classics: Olympiastadion (Munich Olympic Stadium) / Behnisch and Partners & Frei Otto». ArchDaily. 2011-02-11. Retrieved 2022-09-04.
- ^ «Expo 67 German Pavilion». Architectuul. Retrieved 2022-09-04.
Further reading[edit]
Textbooks
- Tobias Holck Colding and William P. Minicozzi, II. A course in minimal surfaces. Graduate Studies in Mathematics, 121. American Mathematical Society, Providence, RI, 2011. xii+313 pp. ISBN 978-0-8218-5323-8
- R. Courant. Dirichlet’s Principle, Conformal Mapping, and Minimal Surfaces. Appendix by M. Schiffer. Interscience Publishers, Inc., New York, N.Y., 1950. xiii+330 pp.
- Ulrich Dierkes, Stefan Hildebrandt, and Friedrich Sauvigny. Minimal surfaces. Revised and enlarged second edition. With assistance and contributions by A. Küster and R. Jakob. Grundlehren der Mathematischen Wissenschaften, 339. Springer, Heidelberg, 2010. xvi+688 pp. ISBN 978-3-642-11697-1, doi:10.1007/978-3-642-11698-8
 , MR2566897
, MR2566897 - H. Blaine Lawson, Jr. Lectures on minimal submanifolds. Vol. I. Second edition. Mathematics Lecture Series, 9. Publish or Perish, Inc., Wilmington, Del., 1980. iv+178 pp. ISBN 0-914098-18-7
- Johannes C.C. Nitsche. Lectures on minimal surfaces. Vol. 1. Introduction, fundamentals, geometry and basic boundary value problems. Translated from the German by Jerry M. Feinberg. With a German foreword. Cambridge University Press, Cambridge, 1989. xxvi+563 pp. ISBN 0-521-24427-7
- Robert Osserman. A survey of minimal surfaces. Second edition. Dover Publications, Inc., New York, 1986. vi+207 pp. ISBN 0-486-64998-9, MR0852409
Online resources
- Karcher, Hermann; Polthier, Konrad (1995). «Touching Soap Films — An introduction to minimal surfaces». Retrieved December 27, 2006. (graphical introduction to minimal surfaces and soap films.)
- Jacek Klinowski. «Periodic Minimal Surfaces Gallery». Retrieved February 2, 2009. (A collection of minimal surfaces with classical and modern examples)
- Martin Steffens and Christian Teitzel. «Grape Minimal Surface Library». Retrieved October 27, 2008. (A collection of minimal surfaces)
- Various (2000). «EG-Models». Retrieved September 28, 2004. (Online journal with several published models of minimal surfaces)
External links[edit]
- «Minimal surface», Encyclopedia of Mathematics, EMS Press, 2001 [1994]
- 3D-XplorMath-J Homepage — Java program and applets for interactive mathematical visualisation
- Gallery of rotatable minimal surfaces
- WebGL-based Gallery of rotatable/zoomable minimal surfaces