1. Типовые задачи с решениями
Задача 1.1.
Найти координаты образа
![]()
и прообраза
![]()
точки
![]()
при повороте вокруг начала координат
на угол
![]()
.
Решение.
Найдем аналитическое выражение поворота,
данного в задаче:
![]()
![]()
Чтобы найти
координаты образа
точки
![]()
,
надо подставить в эти формулы вместо
![]()
и
![]()
данные координаты точки
,
т.е.
![]()
.
Тогда
![]()
;
![]()
,
т.е.
![]()
.
Чтобы найти
координаты прообраза
точки
,
т.е. координаты точки, для которой
теперь является образом, надо положить
![]()
и найти
и
:
![]()
Умножив второе
уравнение системы на
![]()
и сложив с первым, найдем
:
![]()
Подставляя найденное
значение
в одно из уравнений системы, найдем
:
![]()
Таким образом,
![]()
.
Ответ:
,
.
Задача 1.2.
Найти уравнение образа
![]()
и прообраза
![]()
прямой
![]()
при осевой симметрии с осью
![]()
.
Решение.
Аналитическое выражение осевой симметрии
![]()
имеет вид:
![]()
Чтобы найти
уравнение образа
прямой
![]()
,
нужно выразить из этой системы
и
и подставить их в уравнение прямой
:
![]()
.
Опуская штрихи, получаем:
![]()
.
Чтобы найти
уравнение прообраза
прямой
,
запишем уравнение прямой
(образа прямой
)
в виде
![]()
и подставим в него
![]()
и
![]()
из аналитического выражения
:
![]()
.
Получили для прямых
и
одно и то же уравнение. Это не случайно,
т.к. при осевой симметрии (так же как и
при центральной) образ и прообраз любой
фигуры всегда совпадают.
Ответ:
,
![]()
.
Задача 1.3.
Даны прямые
![]()
и
![]()
.
Найти такие точки
и
![]()
,
что
![]()
и
![]()
,
где
![]()
.
Решение.
![]()
,
т.е.
![]()
.
Тогда учитывая, что
![]()
,
получаем:
![]()
(рис. 18).
С
ледовательно,
чтобы найти координаты точки
,
надо сначала найти уравнение образа
![]()
прямой
при параллельном переносе на вектор
![]()
,
а затем решить систему уравнений прямых
и
![]()
.
Найдем аналитическое
выражение параллельного переноса на
вектор
:
![]()
Найдем уравнение
образа
![]()
:
![]()
,
т.е.
![]()
.
Решаем систему
![]()
Сложив почленно
уравнения системы, получим:
![]()
.
Итак,
![]()
.
Так как
,
то
![]()
,
т.е.
−
прообраз точки
.
Найдем координаты прообраза
точки
:
![]()
откуда
![]()
,
т.е.
![]()
.
Ответ:
,
.
2. Задачи для решения на практическом занятии
2.1.
Вывести аналитическое выражение
центральной симметрии с центром
![]()
.
2.2. Найти
координаты образа
и прообраза
![]()
точки
![]()
в центральной симметрии с центром
![]()
.
2.3.
Найти уравнение образа
![]()
и прообраза
![]()
прямой
![]()
при повороте на угол
![]()
вокруг начала координат.
2.4.
В ортонормированном репере дано
аналитическое выражение преобразований
![]()
и
![]()
:
![]()
Доказать, что
и
− движения. Определить их род. Найти их
инвариантные точки.
2.5.
Даны прямые
![]()
и
![]()
.
Найти координаты таких точек
и
,
что
,
![]()
и
![]()
.
2.6.
Найти уравнение оси симметрии точек
![]()
и
![]()
.
3. Задачи для самостоятельного решения
3.1.
Найти координаты образа
![]()
и прообраза
![]()
точки
![]()
при параллельном переносе на вектор
![]()
.
3.2.
Найти уравнение образа
и прообраза
прямой
![]()
при
центральной симметрии с центром
![]()
.
3.3.
Даны прямые
![]()
и
![]()
.
Найти координаты таких точек
и
,
что
![]()
,
![]()
и
![]()
.
3.4.
Найти инвариантные точки преобразования,
заданного формулами:
а)
![]()
б)
![]()
3.5.
Найти аналитическое выражение композиции
осевых симметрий![]()
и определить вид этого движения.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Содержание:
Геометрические преобразования:
В этой лекции вы узнаете, что такое преобразование фигуры. Ознакомитесь с такими видами преобразований, как параллельный перенос, центральная симметрия, осевая симметрия, поворот, гомотетия, подобие.
Вы научитесь применять свойства преобразований при решении задач и доказательстве теорем.
Движение (перемещение) фигуры. Параллельный перенос
Пример:
На рисунке 17.1 изображены отрезок 
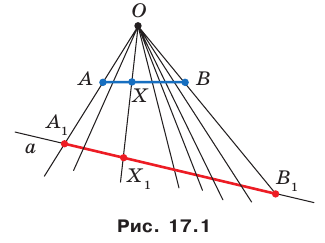
Мы указали правило, с помощью которого каждой точке  отрезка
отрезка  поставлена в соответствие единственная точка
поставлена в соответствие единственная точка  отрезка
отрезка  В этом случае говорят, что отрезок
В этом случае говорят, что отрезок  получен в результате преобразования отрезка
получен в результате преобразования отрезка 
Пример:
На рисунке 17.2 изображены полуокружность  и прямая
и прямая  параллельная диаметру
параллельная диаметру  Каждой точке
Каждой точке  полуокружности поставим в соответствие точку
полуокружности поставим в соответствие точку  прямой а так, чтобы прямая
прямой а так, чтобы прямая  была перпендикулярна прямой
была перпендикулярна прямой  Понятно, что все такие точки
Понятно, что все такие точки  образуют отрезок
образуют отрезок  В этом случае говорят, что отрезок
В этом случае говорят, что отрезок  получен в результате преобразования полуокружности
получен в результате преобразования полуокружности 
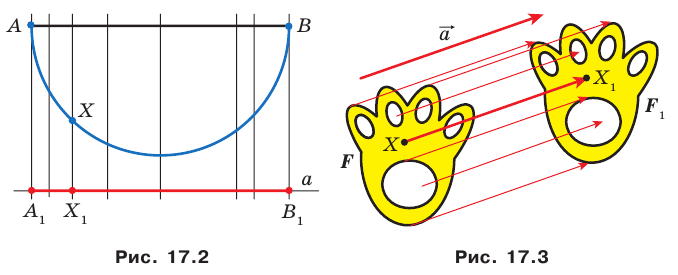
Пример:
Пусть даны некоторая фигура  и вектор
и вектор  (рис. 17.3). Каждой точке
(рис. 17.3). Каждой точке  фигуры
фигуры  поставим в соответствие точку
поставим в соответствие точку  такую, что
такую, что  В результате такого преобразования фигуры
В результате такого преобразования фигуры  получим фигуру
получим фигуру  (рис. 17.3). Такое преобразование фигуры
(рис. 17.3). Такое преобразование фигуры  называют параллельным переносом на вектор
называют параллельным переносом на вектор 
Обобщим приведенные примеры.
Пусть задана некоторая фигура  Каждой точке фигуры
Каждой точке фигуры  поставим в соответствие (сопоставим) по определенному правилу некоторую точку. Все полученные сопоставленные точки образуют фигуру
поставим в соответствие (сопоставим) по определенному правилу некоторую точку. Все полученные сопоставленные точки образуют фигуру  Говорят, что фигура
Говорят, что фигура  получена в результате преобразования фигуры
получена в результате преобразования фигуры  При этом фигуру
При этом фигуру  называют образом фигуры
называют образом фигуры  а фигуру
а фигуру  — прообразом фигуры
— прообразом фигуры 
Так, в примере 1 отрезок  является образом отрезка
является образом отрезка  Точка
Точка  является образом точки
является образом точки  Отрезок
Отрезок  — это прообраз отрезка
— это прообраз отрезка 
Обратим внимание на то, что в примере 3 фигура  равна своему образу
равна своему образу  Преобразования, описанные в примерах 1 и 2, таким свойством не обладают.
Преобразования, описанные в примерах 1 и 2, таким свойством не обладают.
Какими же свойствами должно обладать преобразование, чтобы образ и прообраз были равными фигурами? Оказывается, что достаточно лишь одного свойства: преобразование должно сохранять расстояние между точками, то есть если  — произвольные точки фигуры
— произвольные точки фигуры  а точки
а точки  — их образы, то должно выполняться равенство
— их образы, то должно выполняться равенство 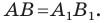
Что такое преобразование фигур
Определение. Преобразование фигуры  сохраняющее расстояние между точками, называют движением (перемещением) фигуры
сохраняющее расстояние между точками, называют движением (перемещением) фигуры 
Если каждой точке  фигуры
фигуры  поставлена в соответствие эта же точка
поставлена в соответствие эта же точка  то такое преобразование фигуры
то такое преобразование фигуры  называют тождественным. При тождественном преобразовании образом фигуры
называют тождественным. При тождественном преобразовании образом фигуры  является сама фигура
является сама фигура  . Очевидно, что тождественное преобразование является движением.
. Очевидно, что тождественное преобразование является движением.
Мы давно используем понятие «равенство фигур», хотя не давали ему строгого определения.
На то, что движение связано с равенством фигур, указывают следующие свойства движения.
Если преобразование является движением, то:
- образом прямой является прямая,
- образом отрезка является отрезок, равный данному;
- образом угла является угол, равный данному,
- образом треугольника является треугольник, равный данному.
Доказательство этих свойств выходит за рамки рассматриваемого курса геометрии.
Свойства движения подсказывают следующее определение.
Определение. Две фигуры называют равными, если существует движение, при котором одна из данных фигур является образом другой.
Запись  означает, что фигуры
означает, что фигуры  равны.
равны.
Если существует движение, при котором фигура  является образом фигуры
является образом фигуры  то обязательно существует движение, при котором фигура
то обязательно существует движение, при котором фигура  является образом фигуры
является образом фигуры  Такие движения называют взаимно обратными.
Такие движения называют взаимно обратными.
Замечание. Ранее равными фигурами мы называли такие фигуры, которые совпадали при наложении. Термин «наложение» интуитивно понятен, и в нашем представлении он связывается с наложением реальных тел. Но геометрические фигуры нельзя наложить в буквальном смысле этого слова. Теперь наложение фигуры  на фигуру
на фигуру  можно рассматривать как движение фигуры
можно рассматривать как движение фигуры  при котором ее образом будет фигура
при котором ее образом будет фигура 
Термин «движение» также ассоциируется с определенным физическим действием: изменением положения тела без деформации.
Именно с этим связано появление этого термина в математике. Однако в геометрии предметом исследования является не процесс, происходящий во времени, а лишь свойства фигуры и ее образа.
То, что изображенные на рисунке 17.3 фигуры  равны, понятно из наглядных соображений. Строгое обоснование этого факта дает следующая теорема.
равны, понятно из наглядных соображений. Строгое обоснование этого факта дает следующая теорема.
Теорема 17.1 (свойство параллельного переноса). Параллельный перенос является движением.
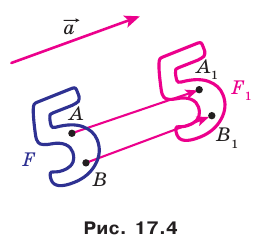
Доказательство: Пусть  — произвольные точки фигуры
— произвольные точки фигуры  (рис. 17.4), точки
(рис. 17.4), точки  — их соответствующие образы при параллельном переносе на вектор
— их соответствующие образы при параллельном переносе на вектор  Докажем, что
Докажем, что 
Имеем:  Векторы
Векторы  и
и  имеют координаты
имеют координаты  Следовательно, координатами точек
Следовательно, координатами точек  и
и  являются соответственно пары чисел
являются соответственно пары чисел 
Найдем расстояние между точками 

Найдем расстояние между точками 

Следовательно, мы показали, что  то есть параллельный перенос сохраняет расстояние между точками.
то есть параллельный перенос сохраняет расстояние между точками. 
Следствие. Если фигура  — образ фигуры
— образ фигуры  при параллельном переносе, то
при параллельном переносе, то 
Это свойство используется при создании рисунков на тканях, обоях, покрытиях для пола и т. п. (рис. 17.5). 
Если фигура  является образом фигуры
является образом фигуры  при параллельном переносе на вектор
при параллельном переносе на вектор  то фигура
то фигура  является образом фигуры
является образом фигуры  при параллельном переносе на вектор
при параллельном переносе на вектор  (рис. 17.6).
(рис. 17.6).
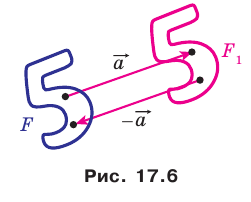
Параллельные переносы на векторы  являются взаимно обратными движениями.
являются взаимно обратными движениями.
Пример №1
Каждой точке  фигуры
фигуры  ставится в соответствие точка
ставится в соответствие точка  — заданные числа. Докажите, что такое преобразование фигуры
— заданные числа. Докажите, что такое преобразование фигуры  является параллельным переносом на вектор
является параллельным переносом на вектор 
Решение:
Рассмотрим вектор  Заметим, что координаты вектора
Заметим, что координаты вектора  равны
равны  то есть
то есть  Следовательно, описанное преобразование фигуры
Следовательно, описанное преобразование фигуры  — параллельный перенос на вектор
— параллельный перенос на вектор 
Пример №2
Точка  является образом точки
является образом точки  при параллельном переносе на вектор
при параллельном переносе на вектор  Найдите координаты вектора
Найдите координаты вектора  и координаты образа точки
и координаты образа точки 
Решение:
Из условия следует, что  Отсюда
Отсюда 
Пусть  — образ точки
— образ точки  Тогда
Тогда  то есть
то есть  Отсюда
Отсюда 
Ответ: 
Пример №3
Даны угол  и прямая
и прямая  не параллельная ни одной из сторон этого угла (рис. 17.7). Постройте прямую
не параллельная ни одной из сторон этого угла (рис. 17.7). Постройте прямую  параллельную прямой
параллельную прямой  так, чтобы стороны угла отсекали на ней отрезок заданной длины
так, чтобы стороны угла отсекали на ней отрезок заданной длины 
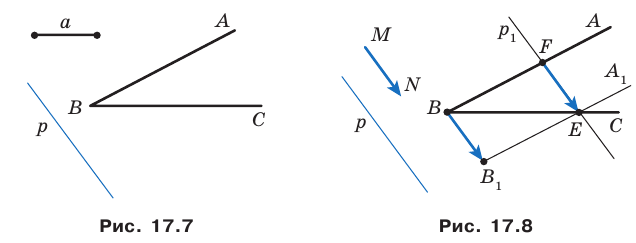
Решение:
Рассмотрим вектор  такой, что
такой, что  и
и  (рис. 17.8). Построим луч
(рис. 17.8). Построим луч  являющийся образом луча
являющийся образом луча  при параллельном переносе на вектор
при параллельном переносе на вектор  Обозначим точку пересечения лучей
Обозначим точку пересечения лучей 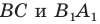 буквой
буквой  Пусть
Пусть  — прообраз точки
— прообраз точки  при рассматриваемом параллельном переносе. Тогда
при рассматриваемом параллельном переносе. Тогда 
Приведенные рассуждения подсказывают следующий алгоритм построения:
- найти образ луча
 при параллельном переносе на вектор
при параллельном переносе на вектор - отметить точку пересечения луча с построенным образом;
- через найденную точку провести прямую параллельную прямой Прямая будет искомой.
 при параллельном переносе на вектор
при параллельном переносе на вектор 
 с построенным образом;
с построенным образом; параллельную прямой
параллельную прямой  Прямая
Прямая  будет искомой.
будет искомой.Осевая симметрия
Определение. Точки  называют симметричными относительно прямой
называют симметричными относительно прямой  если прямая
если прямая  является серединным перпендикуляром отрезка
является серединным перпендикуляром отрезка  (рис. 18.1). Если точка
(рис. 18.1). Если точка  принадлежит прямой
принадлежит прямой  то ее считают симметричной самой себе относительно прямой
то ее считают симметричной самой себе относительно прямой 
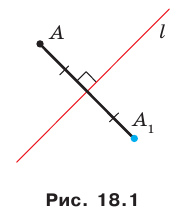
Например, точки  у которых ординаты равны, а абсциссы — противоположные числа, симметричны относительно оси ординат (рис. 18.2).
у которых ординаты равны, а абсциссы — противоположные числа, симметричны относительно оси ординат (рис. 18.2).
Рассмотрим фигуру  и прямую
и прямую  Каждой точке
Каждой точке  фигуры
фигуры  поставим в соответствие симметричную ей относительно прямой
поставим в соответствие симметричную ей относительно прямой  точку
точку 
В результате такого преобразования фигуры  получим фигуру
получим фигуру  (рис. 18.3). Такое преобразование фигуры
(рис. 18.3). Такое преобразование фигуры  называют осевой симметрией относительно прямой
называют осевой симметрией относительно прямой  Прямую
Прямую  называют осью симметрии. Говорят, что фигуры
называют осью симметрии. Говорят, что фигуры  симметричны относительно прямой
симметричны относительно прямой 
Теорема 18.1 (свойство осевой симметрии). Осевая симметрия является движением.
Доказательство: Выберем систему координат так, чтобы ось симметрии совпала с осью ординат. Пусть  и
и  — произвольные точки фигуры
— произвольные точки фигуры  Тогда точки
Тогда точки  и
и  — их соответствующие образы при осевой симметрии относительно оси ординат. Имеем:
— их соответствующие образы при осевой симметрии относительно оси ординат. Имеем:

Мы получили, что  то есть осевая симметрия сохраняет расстояние между точками. Следовательно, осевая симметрия является движением.
то есть осевая симметрия сохраняет расстояние между точками. Следовательно, осевая симметрия является движением. 
Следствие. Если фигуры  симметричны относительно прямой, то
симметричны относительно прямой, то 
Определение. Фигуру называют симметричной относительно прямой  если для каждой точки данной фигуры точка, симметричная ей относительно прямой
если для каждой точки данной фигуры точка, симметричная ей относительно прямой  также принадлежит этой фигуре.
также принадлежит этой фигуре.
Прямую  называют осью симметрии фигуры. Также говорят, что фигура имеет ось симметрии.
называют осью симметрии фигуры. Также говорят, что фигура имеет ось симметрии.
Приведем примеры фигур, имеющих ось симметрии. На рисунке 18.4 изображен равнобедренный треугольник. Прямая, содержащая его высоту, проведенную к основанию, является осью симметрии треугольника.
Любой угол имеет ось симметрии — это пря-Рис. 18.5 мая, содержащая его биссектрису (рис. 18.5). 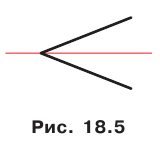
Равносторонний треугольник имеет три оси симметрии (рис. 18.6). Две оси симметрии имеет отрезок: это его серединный перпендикуляр и прямая, содержащая этот отрезок (рис. 18.7).
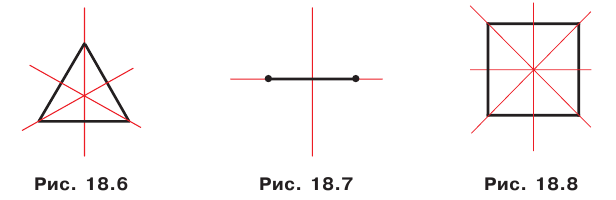
Квадрат имеет четыре оси симметрии (рис. 18.8).
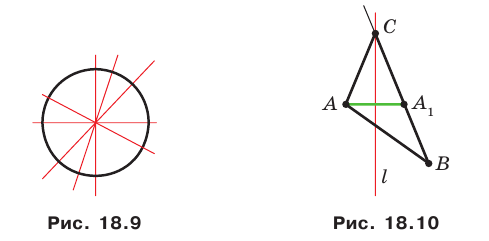
Существуют фигуры, имеющие бесконечно много осей симметрии, например окружность. Любая прямая, проходящая через центр окружности, является ее осью симметрии (рис. 18.9).
Бесконечно много осей симметрии имеет и прямая: сама прямая и любая прямая, ей перпендикулярная, являются ее осями симметрии.
Пример №4
Начертили неравнобедренный треугольник  Провели прямую
Провели прямую  содержащую биссектрису угла
содержащую биссектрису угла  Потом рисунок стерли, оставив только точки
Потом рисунок стерли, оставив только точки  и прямую
и прямую  Восстановите треугольник
Восстановите треугольник 
Решение:
Поскольку прямая  является осью симметрии угла
является осью симметрии угла  то точка
то точка  — образ точки
— образ точки  при симметрии относительно прямой
при симметрии относительно прямой  — принадлежит лучу
— принадлежит лучу  Тогда пересечением прямых
Тогда пересечением прямых  и
и  является вершина
является вершина  искомого треугольника
искомого треугольника  (рис. 18.10).
(рис. 18.10).
Эти соображения подсказывают, как построить искомый треугольник: строим точку  симметричную точке относительно прямой
симметричную точке относительно прямой  Находим вершину
Находим вершину  как точку пересечения прямых
как точку пересечения прямых  и
и 
Пример №5
Точка  принадлежит острому углу
принадлежит острому углу  (рис. 18.11). На сторонах
(рис. 18.11). На сторонах  угла найдите такие точки
угла найдите такие точки  чтобы периметр треугольника
чтобы периметр треугольника  был наименьшим.
был наименьшим.
Решение:
Пусть точки  — образы точки
— образы точки  при симметриях относительно прямых
при симметриях относительно прямых  соответственно (рис. 18.12), а прямая
соответственно (рис. 18.12), а прямая  пересекает стороны
пересекает стороны  в точках
в точках  соответственно. Докажем, что точки
соответственно. Докажем, что точки  — искомые.
— искомые.
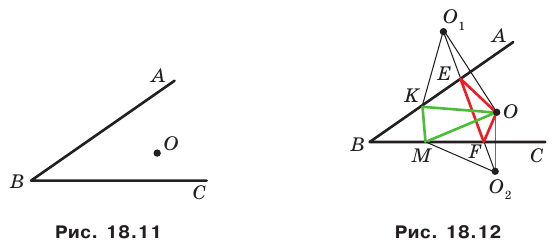
Заметим, что отрезки 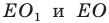 симметричны относительно прямой
симметричны относительно прямой  Следовательно,
Следовательно,  Аналогично
Аналогично  Тогда периметр треугольника
Тогда периметр треугольника  равен длине отрезка
равен длине отрезка 
Покажем, что построенный треугольник имеет наименьший периметр из возможных.
Рассмотрим треугольник  где
где  — произвольные точки соответственно лучей
— произвольные точки соответственно лучей  причем точка
причем точка  не совпадает с точкой
не совпадает с точкой  или точка
или точка  не совпадает с точкой
не совпадает с точкой 
Понятно, что 
Тогда периметр треугольника  равен сумме
равен сумме  Однако
Однако 
Центральная симметрия. Поворот
Определение. Точки  называют симметричными относительно точки
называют симметричными относительно точки  если точка
если точка  является серединой отрезка
является серединой отрезка  (рис. 19.1). Точку
(рис. 19.1). Точку  считают симметричной самой себе.
считают симметричной самой себе.
 Например, точки
Например, точки  у которых как абсциссы, так и ординаты — противоположные числа, симметричны относительно начала координат (рис. 19.2).
у которых как абсциссы, так и ординаты — противоположные числа, симметричны относительно начала координат (рис. 19.2).
Рассмотрим фигуру  и точку
и точку  Каждой точке
Каждой точке  фигуры
фигуры  поставим в соответствие симметричную ей относительно точки
поставим в соответствие симметричную ей относительно точки  точку
точку  В результате такого преобразования фигуры
В результате такого преобразования фигуры  получим фигуру
получим фигуру  (рис. 19.3). Такое преобразование фигуры
(рис. 19.3). Такое преобразование фигуры  называют центральной симметрией относительно точки
называют центральной симметрией относительно точки  Точку
Точку  называют центром симметрии. Также говорят, что фигуры
называют центром симметрии. Также говорят, что фигуры  симметричны относительно точки
симметричны относительно точки 
Теорема 19.1 (свойство центральной симметрии). Центральная симметрия является движением.
Доказательство: Выберем систему координат так, чтобы центр симметрии совпал с началом координат. Пусть  и
и  — произвольные точки фигуры
— произвольные точки фигуры  Точки
Точки  и
и  — соответственно их образы при центральной симметрии относительно начала координат. Имеем:
— соответственно их образы при центральной симметрии относительно начала координат. Имеем: 
Мы получили, что  то есть центральная симметрия сохраняет расстояние между точками. Следовательно, центральная симметрия является движением.
то есть центральная симметрия сохраняет расстояние между точками. Следовательно, центральная симметрия является движением. 
Следствие. Если фигуры  симметричны относительно точки, то
симметричны относительно точки, то 
Определение. Фигуру называют симметричной относительно точки  если для каждой точки данной фигуры точка, симметричная ей относительно точки
если для каждой точки данной фигуры точка, симметричная ей относительно точки  также принадлежит этой фигуре.
также принадлежит этой фигуре.
Точку  называют центром симметрии фигуры. Также говорят, что фигура имеет центр симметрии.
называют центром симметрии фигуры. Также говорят, что фигура имеет центр симметрии.
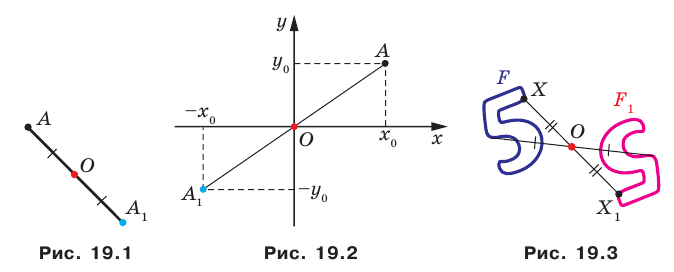
Приведем примеры фигур, имеющих центр симметрии.
Центром симметрии отрезка является его середина (рис. 19.4).
Точка пересечения диагоналей параллелограмма является его центром симметрии (рис. 19.5).
Существуют фигуры, имеющие бесконечно много центров симметрии. Например, каждая точка прямой является ее центром симметрии.
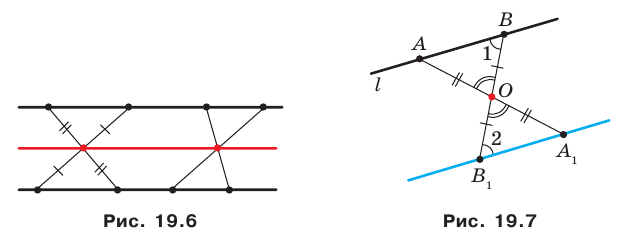
Также бесконечно много центров симметрии имеет фигура, состоящая из двух параллельных прямых. Любая точка прямой, равноудаленной от двух данных, является центром симметрии рассматриваемой фигуры (рис. 19.6).
Пример №6
Докажите, что образом данной прямой  при симметрии относительно точки
при симметрии относительно точки  не принадлежащей прямой
не принадлежащей прямой  является прямая, параллельная данной.
является прямая, параллельная данной.
Решение:
Поскольку центральная симметрия — это движение, то образом прямой  будет прямая. Для построения прямой достаточно найти две любые ее точки.
будет прямая. Для построения прямой достаточно найти две любые ее точки.
Выберем на прямой  произвольные точки
произвольные точки  (рис. 19.7). Пусть точки
(рис. 19.7). Пусть точки  — их образы при центральной симметрии относительно точки
— их образы при центральной симметрии относительно точки  Тогда прямая
Тогда прямая  — образ прямой
— образ прямой 
Поскольку  углы
углы  равны как вертикальные, то треугольники
равны как вертикальные, то треугольники  равны по первому признаку равенства треугольников. Отсюда
равны по первому признаку равенства треугольников. Отсюда  (рис. 19.7). Следовательно, по признаку параллельных прямых
(рис. 19.7). Следовательно, по признаку параллельных прямых 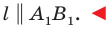
Пример №7
Точка  принадлежит углу
принадлежит углу  (рис. 19.8). На сторонах
(рис. 19.8). На сторонах  угла постройте такие точки
угла постройте такие точки  чтобы точка
чтобы точка  была серединой отрезка
была серединой отрезка 
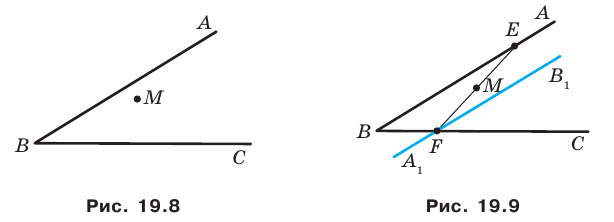
Решение:
Пусть прямая  — образ прямой
— образ прямой  при центральной симметрии относительно точки
при центральной симметрии относительно точки  (рис. 19.9). Обозначим буквой
(рис. 19.9). Обозначим буквой  точку пересечения прямых
точку пересечения прямых 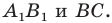
Найдем прообраз точки  Очевидно, что он лежит на прямой
Очевидно, что он лежит на прямой  Поэтому достаточно найти точку пересечения прямых
Поэтому достаточно найти точку пересечения прямых 
Обозначим эту точку буквой  Тогда
Тогда  — искомые точки.
— искомые точки.
Изучая окружающий мир, мы часто видим примеры проявления симметрии в природе (рис. 19.10). Объекты, имеющие ось или центр симметрии, легко воспринимаются и радуют взгляд. Недаром в Древней Греции слово «симметрия» служило синонимом слов «гармония», «красота». 
Идея симметрии широко используется в изобразительном искусстве, архитектуре и технике (рис. 19.11).
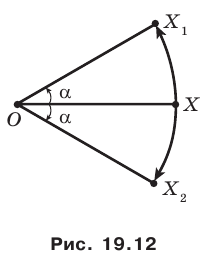
На рисунке 19.12 изображены точки  такие, что
такие, что 
Говорят, что точка  является образом точки
является образом точки  при повороте вокруг центра
при повороте вокруг центра  против часовой стрелки на угол
против часовой стрелки на угол 
Так же говорят, что точка  — это образ точки
— это образ точки  при повороте вокруг центра
при повороте вокруг центра  по часовой стрелке на угол
по часовой стрелке на угол 
Точку  называют центром поворота, угол
называют центром поворота, угол  — углом поворота.
— углом поворота.
Рассмотрим фигуру  точку
точку  и угол
и угол  Каждой точке
Каждой точке  фигуры
фигуры  поставим в соответствие точку
поставим в соответствие точку  являющуюся образом точки
являющуюся образом точки  при повороте вокруг центра
при повороте вокруг центра  против часовой стрелки на угол
против часовой стрелки на угол  (если точка
(если точка  принадлежит фигуре
принадлежит фигуре  то ей сопоставляется она сама). В результате такого преобразования фигуры
то ей сопоставляется она сама). В результате такого преобразования фигуры  получим фигуру
получим фигуру  (рис. 19.13). Такое преобразование фигуры
(рис. 19.13). Такое преобразование фигуры  называют поворотом вокруг центра
называют поворотом вокруг центра  против часовой стрелки на угол
против часовой стрелки на угол  Точку
Точку  называют центром поворота.
называют центром поворота. 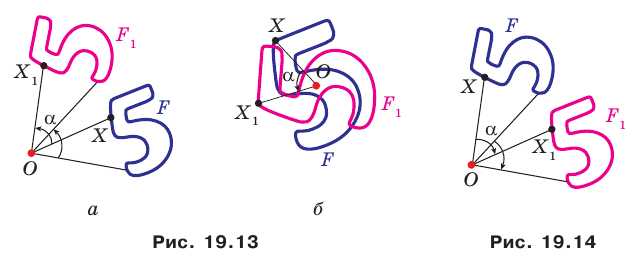
Аналогично определяют преобразование поворота фигуры  по часовой стрелке на угол
по часовой стрелке на угол  (рис. 19.14).
(рис. 19.14).
Заметим, что центральная симметрия является поворотом вокруг центра симметрии на угол 
Теорема 19.2 (свойство поворота). Поворот является движением.
Докажите эту теорему самостоятельно.
Следствие. Если фигура  — образ фигуры
— образ фигуры  при повороте, то
при повороте, то 
Пример №8
Даны прямая  и точка
и точка  вне ее. Постройте образ прямой
вне ее. Постройте образ прямой  при повороте вокруг точки
при повороте вокруг точки  против часовой стрелки на угол
против часовой стрелки на угол 
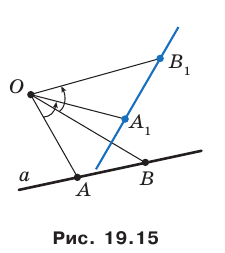
Решение:
Поскольку поворот — это движение, то образом прямой  будет прямая. Для построения прямой достаточно найти две любые ее точки. Выберем на прямой
будет прямая. Для построения прямой достаточно найти две любые ее точки. Выберем на прямой  произвольные точки
произвольные точки  (рис. 19.15). Построим точки
(рис. 19.15). Построим точки  — их образы при повороте вокруг точки
— их образы при повороте вокруг точки  против часовой стрелки на угол
против часовой стрелки на угол  Тогда прямая
Тогда прямая  — образ прямой
— образ прямой 
Пример №9
Точка  принадлежит углу
принадлежит углу  но не принадлежит его сторонам. Постройте равносторонний треугольник, одна вершина которого является точкой
но не принадлежит его сторонам. Постройте равносторонний треугольник, одна вершина которого является точкой  а две другие принадлежат сторонам
а две другие принадлежат сторонам 
Решение:
Пусть прямая  — образ прямой
— образ прямой  при повороте вокруг центра
при повороте вокруг центра  против часовой стрелки на угол
против часовой стрелки на угол  (рис. 19.16). Обозначим буквой
(рис. 19.16). Обозначим буквой  точку пересечения прямых
точку пересечения прямых  и
и 
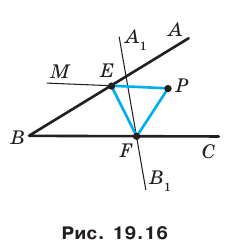
Пусть точка  — прообраз точки
— прообраз точки  при рассматриваемом повороте. Точка
при рассматриваемом повороте. Точка  принадлежит стороне
принадлежит стороне  угла
угла 
Эти соображения подсказывают, как построить искомый треугольник.
Строим прямую  как образ прямой
как образ прямой  при повороте вокруг центра
при повороте вокруг центра  против часовой стрелки на угол
против часовой стрелки на угол  Пусть
Пусть  — точка пересечения прямых
— точка пересечения прямых 
Строим угол  равный
равный  Пусть прямые
Пусть прямые  пересекаются в точке
пересекаются в точке  Эта точка и является прообразом точки
Эта точка и является прообразом точки 
Имеем:  Следовательно, треугольник
Следовательно, треугольник  равносторонний.
равносторонний. 
Подобие фигур
На рисунке 20.1 изображены точки  такие, что
такие, что  Говорят, что точка
Говорят, что точка  — это образ точки
— это образ точки  при гомотетии с центром
при гомотетии с центром  и коэффициентом 2.
и коэффициентом 2. 
На рисунке 20.2 изображены точки  такие, что
такие, что  Говорят, что точка
Говорят, что точка  — это образ точки
— это образ точки  при гомотетии с центром
при гомотетии с центром  и коэффициентом
и коэффициентом 
Вообще, если точки  таковы, что
таковы, что  то говорят, что точка
то говорят, что точка  — это образ точки
— это образ точки  при гомотетии с центром
при гомотетии с центром  и коэффициентом
и коэффициентом 
Точку  называют центром гомотетии, число
называют центром гомотетии, число  — коэффициентом гомотетии,
— коэффициентом гомотетии, 
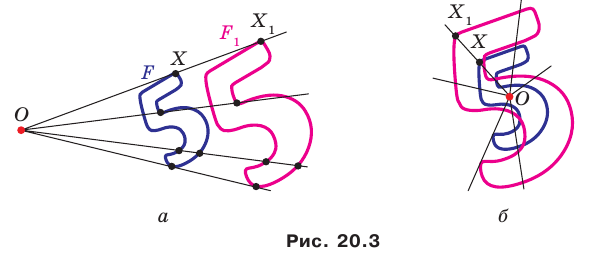
Рассмотрим фигуру  и точку
и точку  Каждой точке
Каждой точке  фигуры
фигуры  поставим в соответствие точку
поставим в соответствие точку  являющуюся образом точки
являющуюся образом точки  при гомотетии с центром
при гомотетии с центром  и коэффициентом
и коэффициентом  (если точка
(если точка  принадлежит фигуре
принадлежит фигуре  то ей сопоставляется она сама). В результате такого преобразования фигуры
то ей сопоставляется она сама). В результате такого преобразования фигуры  получим фигуру
получим фигуру  (рис. 20.3). Такое преобразование фигуры
(рис. 20.3). Такое преобразование фигуры  называют гомотетией с центром
называют гомотетией с центром  и коэффициентом
и коэффициентом  Также говорят, что фигура
Также говорят, что фигура  гомотетична фигуре
гомотетична фигуре  с центром
с центром  и коэффициентом
и коэффициентом 
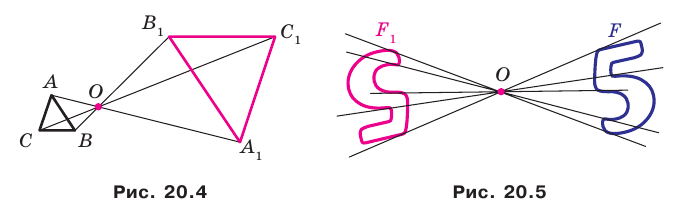
Например, на рисунке 20.4 треугольник  гомотетичен треугольнику
гомотетичен треугольнику  с центром
с центром  и коэффициентом, равным -3.
и коэффициентом, равным -3.
можно сказать, что треугольник  гомотетичен треугольнику
гомотетичен треугольнику  с тем же центром, но коэффициентом гомотетии, равным
с тем же центром, но коэффициентом гомотетии, равным 
Отметим, что при  гомотетия с центром
гомотетия с центром  является центральной симметрией с центром
является центральной симметрией с центром  (рис. 20.5). Если
(рис. 20.5). Если  то гомотетия является тождественным преобразованием.
то гомотетия является тождественным преобразованием.
Очевидно, что при  гомотетия не является движением.
гомотетия не является движением.
Теорема 20.1. При гомотетии фигуры  с коэффициентом
с коэффициентом  все расстояния между ее точками изменяются в
все расстояния между ее точками изменяются в  раз, то есть если
раз, то есть если  — произвольные точки фигуры
— произвольные точки фигуры  а точки
а точки  и
и  — их соответствующие образы при гомотетии с коэффициентом
— их соответствующие образы при гомотетии с коэффициентом  то
то 
Доказательство: Пусть точка  — центр гомотетии. Тогда
— центр гомотетии. Тогда  Имеем:
Имеем: 

Следствие. Если треугольник  гомотетичен треугольнику
гомотетичен треугольнику  с коэффициентом гомотетии
с коэффициентом гомотетии 
Для доказательства этого утверждения достаточно воспользоваться теоремой 20.1 и третьим признаком подобия треугольников.
Гомотетия обладает целым рядом других свойств.
При гомотетии:
Эти свойства вы можете доказать на занятиях математического кружка.
Перечисленные свойства гомотетии указывают на то, что это преобразование может изменить размеры фигуры, но не меняет ее форму, то есть при гомотетии образ и прообраз являются подобными фигурами. Заметим, что в курсе геометрии 8 класса, говоря о подобии фигур, мы давали определение только подобных треугольников. Сейчас определим понятие подобия для произвольных фигур.
На рисунке 20.6 фигура  гомотетична фигуре
гомотетична фигуре  а фигура
а фигура  симметрична фигуре
симметрична фигуре  относительно прямой
относительно прямой 
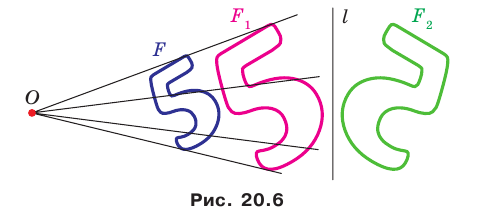
Говорят, что фигура  получена из фигуры
получена из фигуры  в результате композиции двух преобразований: гомотетии и осевой симметрии.
в результате композиции двух преобразований: гомотетии и осевой симметрии.
Поскольку  то фигуры
то фигуры  имеют одинаковые формы, но разные размеры, то есть они подобны. Говорят, что фигура
имеют одинаковые формы, но разные размеры, то есть они подобны. Говорят, что фигура  получена из фигуры
получена из фигуры  в результате преобразования подобия.
в результате преобразования подобия.
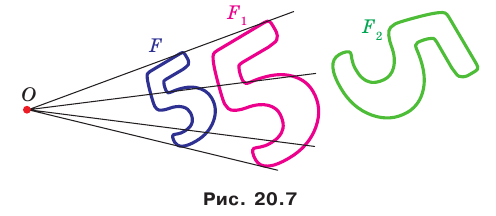
На рисунке 20.7 фигура  гомотетична фигуре
гомотетична фигуре  а фигура
а фигура  — образ фигуры
— образ фигуры  при некотором движении. Здесь также можно утверждать, что фигуры
при некотором движении. Здесь также можно утверждать, что фигуры  подобны.
подобны.
Из сказанного следует, что целесообразно принять такое определение.
Определение. Две фигуры называют подобными, если одну из них можно получить из другой в результате композиции двух преобразований: гомотетии и движения.
Это определение иллюстрирует схема, изображенная на рисунке 20.8. 
Запись  означает, что фигуры
означает, что фигуры  подобны. Также говорят, что фигура
подобны. Также говорят, что фигура  — образ фигуры
— образ фигуры  при преобразовании подобия.
при преобразовании подобия.
Из приведенного определения следует, что при преобразовании подобия фигуры  расстояния между ее точками изменяются в одно и то же количество раз.
расстояния между ее точками изменяются в одно и то же количество раз.
Так как тождественное преобразование является движением, то из схемы, изображенной на рисунке 20.8, следует, что гомотетия — частный случай преобразования подобия.
Пусть  — произвольные точки фигуры
— произвольные точки фигуры  а точки
а точки  — их образы при преобразовании подобия. Точки
— их образы при преобразовании подобия. Точки  принадлежат фигуре
принадлежат фигуре  которая подобна фигуре
которая подобна фигуре  Число
Число  называют коэффициентом подобия. Говорят, что фигура
называют коэффициентом подобия. Говорят, что фигура  подобна фигуре
подобна фигуре  с коэффициентом подобия
с коэффициентом подобия  а фигура
а фигура  подобна фигуре
подобна фигуре  с коэффициентом подобия
с коэффициентом подобия 
Заметим, что преобразование подобия с коэффициентом  является движением. Отсюда следует, что движение — частный случай преобразования подобия.
является движением. Отсюда следует, что движение — частный случай преобразования подобия.
С преобразованием подобия мы часто встречаемся в повседневной жизни (рис. 20.9). Например, в результате изменения масштаба карты получаем карту, подобную данной. Фотография — это преобразование негатива в подобное изображение на фотобумаге. Перенося в свою тетрадь рисунок, сделанный учителем на доске, вы также выполняете преобразование подобия. 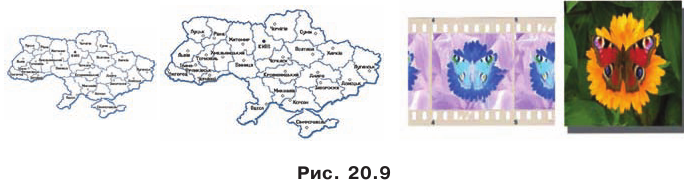 Теорема 20.2. Отношение площадей подобных многоугольников равно квадрату коэффициента подобия.
Теорема 20.2. Отношение площадей подобных многоугольников равно квадрату коэффициента подобия.
Доказательство этой теоремы выходит за рамки рассматриваемого курса геометрии. Мы докажем ее для частного случая, рассмотрев подобные треугольники.
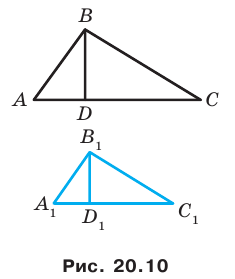
Доказательство: Пусть треугольник  — образ треугольника
— образ треугольника  при преобразовании подобия с коэффициентом
при преобразовании подобия с коэффициентом  (рис. 20.10). Сторона
(рис. 20.10). Сторона  — образ стороны
— образ стороны  Тогда
Тогда  Проведем высоту
Проведем высоту  Пусть точка
Пусть точка  — образ точки
— образ точки 
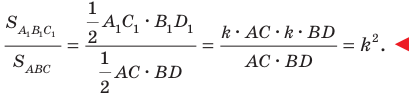
Поскольку при преобразовании подобия сохраняются углы, то отрезок  — высота треугольника
— высота треугольника 
Тогда  Имеем:
Имеем:
Пример №10
Докажите, что образом прямой  при гомотетии с центром
при гомотетии с центром  не принадлежащим прямой
не принадлежащим прямой  является прямая, параллельная данной.
является прямая, параллельная данной.
Решение:
Из свойств гомотетии следует, что образом прямой  будет прямая. Для построения прямой достаточно найти две любые ее точки. Выберем на прямой
будет прямая. Для построения прямой достаточно найти две любые ее точки. Выберем на прямой  произвольные точки
произвольные точки  (рис. 20.11). Пусть точки
(рис. 20.11). Пусть точки  — их образы при гомотетии с центром
— их образы при гомотетии с центром  и коэффициентом
и коэффициентом  (рисунок 20.11 соответствует случаю, когда
(рисунок 20.11 соответствует случаю, когда  Тогда прямая
Тогда прямая  — образ прямой
— образ прямой 
При доказательстве теоремы 20.1 мы показали, что  Следовательно,
Следовательно, 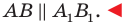
Пример №11
В остроугольный треугольник  впишите квадрат так, чтобы две его вершины лежали соответственно на сторонах
впишите квадрат так, чтобы две его вершины лежали соответственно на сторонах  и
и  а две другие — на стороне
а две другие — на стороне 
Решение:
Из произвольной точки  стороны
стороны  опустим перпендикуляр
опустим перпендикуляр  на сторону
на сторону  (рис. 20.12). Построим квадрат
(рис. 20.12). Построим квадрат  так, чтобы точка
так, чтобы точка  лежала на луче
лежала на луче  Пусть луч
Пусть луч  пересекает сторону
пересекает сторону  в точке
в точке 
Рассмотрим гомотетию с центром  и коэффициентом
и коэффициентом  Тогда точка
Тогда точка  образ точки
образ точки  при этой гомотетии. Образом отрезка
при этой гомотетии. Образом отрезка  является отрезок
является отрезок  где точка
где точка  принадлежит лучу
принадлежит лучу  причем
причем 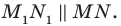 Аналогично отрезок
Аналогично отрезок  такой, что точка
такой, что точка  принадлежит лучу
принадлежит лучу  является образом отрезка
является образом отрезка  Следовательно, отрезки
Следовательно, отрезки  — соседние стороны искомого квадрата. Для завершения построения осталось опустить перпендикуляр
— соседние стороны искомого квадрата. Для завершения построения осталось опустить перпендикуляр  на сторону
на сторону 
Пример №12
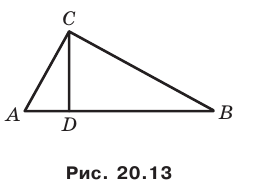
Отрезок  — высота прямоугольного треугольника
— высота прямоугольного треугольника  Найдите радиус
Найдите радиус  вписанной окружности треугольника
вписанной окружности треугольника  если радиусы окружностей, вписанных в треугольники
если радиусы окружностей, вписанных в треугольники  соответственно равны
соответственно равны 
Решение:
Поскольку угол  — общий для прямоугольных треугольников
— общий для прямоугольных треугольников  то эти треугольники подобны (рис. 20.13). Пусть коэффициент подобия равен
то эти треугольники подобны (рис. 20.13). Пусть коэффициент подобия равен  Очевидно, что
Очевидно, что  Аналогично
Аналогично  с коэффициентом подобия
с коэффициентом подобия 
Обозначим площади треугольников  соответственно
соответственно  и
и  Имеем:
Имеем:
Отсюда  Получаем, что
Получаем, что 
Ответ: 
Применение преобразований фигур при решении задач
Преобразование фигур — эффективный метод решения целого ряда геометрических задач. Проиллюстрируем это на примерах.
Пример №13
На сторонах  остроугольного треугольника
остроугольного треугольника  постройте такие точки
постройте такие точки  соответственно, чтобы периметр треугольника
соответственно, чтобы периметр треугольника  был наименьшим.
был наименьшим.
Решение:
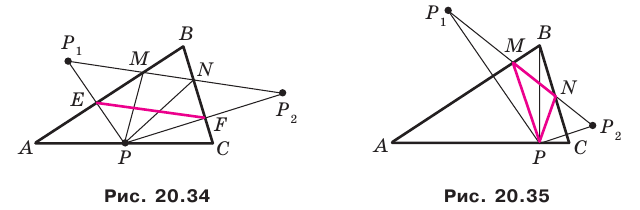
Пусть  — произвольная точка стороны
— произвольная точка стороны  треугольника
треугольника  точки
точки  — ее образы при симметрии относительно прямых
— ее образы при симметрии относительно прямых  соответственно (рис. 20.34). Прямая
соответственно (рис. 20.34). Прямая  пересекает стороны
пересекает стороны  соответственно в точках
соответственно в точках  Из решения задачи 2 п. 18 следует, что из периметров всех треугольников, для которых точка
Из решения задачи 2 п. 18 следует, что из периметров всех треугольников, для которых точка  фиксирована, а точки
фиксирована, а точки  принадлежат сторонам
принадлежат сторонам  периметр треугольника
периметр треугольника  является наименьшим. Этот периметр равен длине отрезка
является наименьшим. Этот периметр равен длине отрезка 
Заметим, что отрезок  — средняя линия треугольника
— средняя линия треугольника 
Тогда 
Поскольку  то точки
то точки  лежат на одной окружности с диаметром
лежат на одной окружности с диаметром  Отсюда
Отсюда  Следовательно, длина отрезка
Следовательно, длина отрезка  будет наименьшей при наименьшей длине отрезка
будет наименьшей при наименьшей длине отрезка  то есть тогда, когда
то есть тогда, когда  — высота треугольника
— высота треугольника 
На рисунке 20.35 отрезок  — высота треугольника Алгоритм построения точек
— высота треугольника Алгоритм построения точек  понятен из рисунка.
понятен из рисунка.
Из построения следует, что периметр любого другого треугольника, вершины которого лежат на сторонах треугольника  больше периметра треугольника
больше периметра треугольника  Поэтому искомый треугольник является единственным — это построенный треугольник
Поэтому искомый треугольник является единственным — это построенный треугольник 
Можно показать (сделайте это самостоятельно), что точки  и
и  являются основаниями высот, проведенных соответственно из вершин
являются основаниями высот, проведенных соответственно из вершин  треугольника
треугольника 
Следовательно, вершины искомого треугольника — это основания высот данного треугольника  Такой треугольник называют ортоцентрическим.
Такой треугольник называют ортоцентрическим.
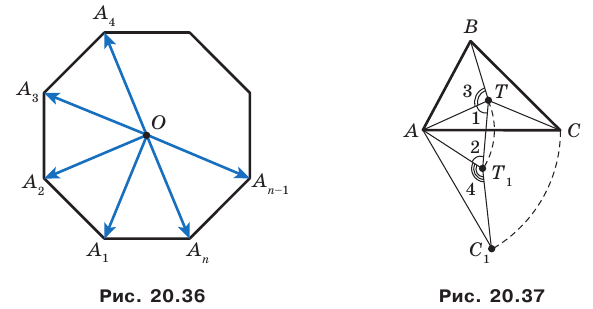
Пример №14
Точка  — центр правильного
— центр правильного  угольника
угольника  (рис. 20.36). Докажите, что
(рис. 20.36). Докажите, что 
Решение:
Пусть  Рассмотрим поворот с центром
Рассмотрим поворот с центром  на угол
на угол  например, против часовой стрелки. При таком преобразовании образом данного
например, против часовой стрелки. При таком преобразовании образом данного  -угольника будет этот же
-угольника будет этот же  угольник. Следовательно, искомая сумма не изменится. А это возможно лишь тогда, когда
угольник. Следовательно, искомая сумма не изменится. А это возможно лишь тогда, когда 
Пример №15
Внутри треугольника  все углы которого меньше
все углы которого меньше  найдите такую точку
найдите такую точку  чтобы сумма
чтобы сумма  была наименьшей.
была наименьшей.
Решение:
Пусть  — произвольная точка данного треугольника
— произвольная точка данного треугольника  (рис. 20.37). Рассмотрим поворот с центром
(рис. 20.37). Рассмотрим поворот с центром  на угол
на угол  по часовой стрелке. Пусть точки
по часовой стрелке. Пусть точки  — образы точек
— образы точек  соответственно (рис. 20.37). Поскольку поворот является движением, то
соответственно (рис. 20.37). Поскольку поворот является движением, то 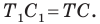 Очевидно, что треугольник
Очевидно, что треугольник  равносторонний. Тогда
равносторонний. Тогда 
Имеем: 
Понятно, что сумма  будет наименьшей, если точки
будет наименьшей, если точки  лежат на одной прямой. Поскольку
лежат на одной прямой. Поскольку  то это условие будет выполнено тогда, когда
то это условие будет выполнено тогда, когда 
Так как угол  — образ угла
— образ угла  при указанном повороте, то должно выполняться равенство
при указанном повороте, то должно выполняться равенство 
Итак, точки  будут принадлежать одной прямой тогда и только тогда, когда
будут принадлежать одной прямой тогда и только тогда, когда  Отсюда
Отсюда 
Таким образом, сумма  будет наименьшей, если
будет наименьшей, если 
Найти точку  можно, например, построив ГМТ, из которых отрезки
можно, например, построив ГМТ, из которых отрезки  видны под углами
видны под углами  (рис. 20.38).
(рис. 20.38).
Понятно, что если один из углов треугольника  не меньше
не меньше  то точка пересечения построенных дуг не будет расположена внутри треугольника. Можно показать, что в треугольнике с углом, не меньшим
то точка пересечения построенных дуг не будет расположена внутри треугольника. Можно показать, что в треугольнике с углом, не меньшим  точка
точка  сумма расстояний от которой до вершин треугольника является наименьшей, совпадает с вершиной тупого угла.
сумма расстояний от которой до вершин треугольника является наименьшей, совпадает с вершиной тупого угла. 
Пример №16
Отрезки  — высоты остроугольного треугольника
— высоты остроугольного треугольника  Докажите, что радиус описанной окружности треугольника
Докажите, что радиус описанной окружности треугольника  в два раза больше радиуса описанной окружности треугольника
в два раза больше радиуса описанной окружности треугольника 
Решение:
Пусть прямые  пересекают описанную окружность треугольника
пересекают описанную окружность треугольника  соответственно в точках
соответственно в точках  (рис. 20.39). Докажем, что
(рис. 20.39). Докажем, что 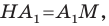 где точка
где точка  — ортоцентр треугольника
— ортоцентр треугольника 
Имеем: 
Углы 2 и 3 равны как вписанные, опирающиеся на дугу  Следовательно,
Следовательно, 
Тогда в треугольнике  отрезок
отрезок  является биссектрисой и высотой, а следовательно, и медианой. Отсюда
является биссектрисой и высотой, а следовательно, и медианой. Отсюда 
Аналогично можно доказать, что 
Теперь понятно, что треугольник  гомотетичен треугольнику
гомотетичен треугольнику  с центром
с центром  и коэффициентом 2. Тогда радиус описанной окружности треугольника
и коэффициентом 2. Тогда радиус описанной окружности треугольника  в два раза больше радиуса описанной окружности треугольника
в два раза больше радиуса описанной окружности треугольника  Осталось заметить, что треугольники
Осталось заметить, что треугольники  вписаны в одну и ту же окружность.
вписаны в одну и ту же окружность.
- Планиметрия — формулы, определение и вычисление
- Стереометрия — формулы, определение и вычисление
- Возникновение геометрии
- Призма в геометрии
- Перпендикулярность прямых и плоскостей в пространстве
- Ортогональное проецирование
- Декартовы координаты на плоскости
- Декартовы координаты в пространстве
Геометрия, 11 класс
Урок №4. Движения в пространстве
Перечень вопросов, рассматриваемых в теме:
- понятие «движение» в пространстве;
- свойства движений в пространстве;
- виды движений в пространстве;
- отличия движений в пространстве от движений на плоскости.
Глоссарий по теме
- Пусть каждой точке А пространства поставлена в соответствие точка А1 пространства. При этом каждая точка А1 поставлена в соответствие какой-то точке А. Тогда говорят, что задано отображение пространства на себя. При этом точка А перешла в точку А1.
- Преобразованием пространства называется взаимно-однозначное отображение пространства на себя.
- Под движением пространства понимается отображение пространства на себя, при котором любые две точки A и B переходят (отображаются) в некие точки A1 и B1 так, что |AB|=|A1B1|.
- Центральная симметрия пространства относительно точки O – преобразование пространства, при котором каждая точка пространства отображается на точку, симметричную ей относительно точки O. Точка O – центр симметрии.
- Осевая симметрия пространства относительно прямой m – преобразование пространства, при котором каждая точка пространства отображается на точку, симметричную ей относительно прямой . Прямая m – ось симметрии.
- Зеркальная симметрия пространства относительно плоскости α – преобразование пространства, при котором каждая точка пространства отображается на точку, симметричную ей относительно плоскости α. Плоскость α – плоскость симметрии.
- Параллельный перенос на вектор – преобразование пространства, при котором каждая точка пространства M, отображается на такую точку M’, что выполняется равенство .
- Поворот пространства на угол φ вокруг прямой n – преобразование пространства, при котором любая точка прямой остается неподвижной и в любой плоскости, перпендикулярной прямой n, осуществляется поворот этой плоскости на угол φ вокруг точки ее пересечения с прямой n.
 – преобразование пространства, при котором каждая точка пространства M, отображается на такую точку M’, что выполняется равенство
– преобразование пространства, при котором каждая точка пространства M, отображается на такую точку M’, что выполняется равенство  .
.Основная литература:
Атанасян Л. С., Бутузов В. Ф., Кадомцев С. Б. и др. Геометрия. 10–11 классы : учеб. для общеобразоват. организаций : базовый и углубл. уровни – М. : Просвещение, 2014. – 255, сс. 121-126.
Дополнительная литература:
Шарыгин И.Ф. Геометрия. 10–11 кл. : учеб. для общеобразоват. учреждений – М.: Дрофа, 2009. – 235, : ил., ISBN 978–5–358–05346–5, сс. 178-196.
Потоскуев Е.В., Звавич Л. И., Геометрия. 11кл.: учеб. Для классов с углубл. И профильным изучением математики общеобразоват. Учреждений – М.: Дрофа, 2004. – 368 с.: ил., ISBN 5–7107–8310–2, сс. 5-63.
Открытые электронные ресурсы:
Образовательный портал “Решу ЕГЭ”. https://mathb-ege.sdamgia.ru/test?theme=177
Теоретический материал для самостоятельного изучения
1. Определение движения в пространстве
Допустим, что каждой точке А пространства поставлена в соответствие точка А1 пространства. При этом каждая точка А1 поставлена в соответствие какой-то точке А. Тогда говорят, что задано отображение пространства на себя. При этом точка А перешла в точку А1. А1 — образ точки А.
Преобразованием пространства называется взаимно-однозначное отображение пространства на себя.
Два преобразования называются равными, если образы любой точки при этих преобразованиях совпадают.
Точка А называется неподвижной точкой при некотором преобразовании f, если при этом преобразовании она отображается на себя.
Фигура F называется неподвижной фигурой при некотором преобразовании f, если при этом преобразовании она отображается на себя.
Преобразование пространства, которое каждую точку отображает на себя, называется тождественным преобразованием. Оно обычно обозначается Е. При тождественном преобразовании все точки и все фигуры пространства являются неподвижными.
Для любых двух преобразований можно рассмотреть третье, которое получается последовательным применением этих преобразований. Например, если преобразование f отображает точку М на точку М’, а преобразование g отображает точку М’ на точку M», то преобразование f°g отображает точку М на точку M»: f°g(М)=g(f(M))=M».
f°g — композиция преобразований f и g.
Под движением пространства понимается отображение пространства на себя, при котором любые две точки A и B переходят (отображаются) в некие точки A1 и B1 так, что |AB|=|A1B1|.
Иными словами, движение пространства — это отображение пространства на себя, сохраняющее расстояния между точками. Так же, как и для движения на плоскости, можно доказать, что при движении в пространстве
— прямые переходят в прямые,
— полупрямые — в полупрямые,
— отрезки — в отрезки,
— сохраняются углы между прямыми.
Новое свойство движения в пространстве: движение переводит плоскости в плоскости.
В пространстве, так же как и на плоскости, две фигуры называются равными, если они совмещаются движением.
Можно доказать, что композиция двух движений пространства есть движение.
2. Виды движений.
Центральная симметрия.
Центральная симметрия в пространстве задается и определяется так же, как и на плоскости
Определение:
Преобразование пространства, при котором каждая точка пространства отображается на точку, симметричную ей относительно точки O, называется центральной симметрией пространства относительно точки O. При этом точка O отображается на себя и называется центром симметрии.

Рисунок 1 – Центральная симметрия
На рисунке точка О – центр симметрии, АО=А1О, ВО=В1О, СО=С1О, DО=D1О (по определению точки, симметричной данной).
Центральная симметрия имеет только одну неподвижную точку – центр симметрии.
Сформулируем некоторые свойства центральной симметрии:
1) Прямая, проходящая через центр симметрии, отображается на себя.
2) Прямая, не проходящая через центр симметрии, отображается на параллельную ей прямую.
3) Плоскость, проходящая через центр симметрии, отображается на себя (то есть является неподвижной плоскостью этой центральной симметрии).
4) Плоскость, не проходящая через центр симметрии, отображается на параллельную ей плоскость.
3. Осевая симметрия (симметрия относительно прямой):
Определение:
Точка M’ пространства, не лежащая на прямой m, называется симметричной точке М относительно прямой m, если отрезок ММ’ перпендикулярен этой прямой и делится ею пополам.
Определение:
Преобразование пространства, при котором каждая точка пространства отображается на точку, симметричную ей относительно прямой m, называется осевой симметрией пространства относительно прямой m. Прямая m отображается на себя и называется осью симметрии.

Рисунок 2 – Осевая симметрия
Неподвижные точки осевой симметрии — любая точка прямой m.
Неподвижные прямые осевой симметрии:
1) сама прямая m
2) любая прямая, перпендикулярная прямой m
Неподвижные плоскости осевой симметрии:
1) любая плоскость, проходящая через прямую m
2) любая плоскость, перпендикулярная прямой m.
Зеркальная симметрия (симметрия относительно плоскости):
Определение:
Точка M’ пространства, не лежащая на плоскости α, называется симметричной точке М относительно плоскости α, если отрезок ММ’ перпендикулярен этой плоскости и делится ею пополам.
Определение:
Преобразование пространства, при котором каждая точка пространства отображается на точку, симметричную ей относительно плоскости α, называется зеркальной симметрией пространства относительно плоскости α. Плоскость α отображается на себя и называется плоскостью симметрии.

Рисунок 3 – Зеркальная симметрия
Неподвижные точки зеркальной симметрии — любая точка плоскости α.
Неподвижные прямые зеркальной симметрии:
1) любая прямая плоскости α
2) любая прямая, перпендикулярная плоскости α
Неподвижные плоскости зеркальной симметрии:
1) сама плоскость α
2) любая плоскость, перпендикулярная плоскости α.
Параллельный перенос (точки переносятся на данный вектор):

Рисунок 4 – параллельный перенос
Определение
Пусть дан вектор  .
.
Преобразование пространства, при котором каждая точка пространства M, отображается на такую точку M’, что выполняется равенство  , называется параллельным переносом на вектор
, называется параллельным переносом на вектор  .
.
Перенос на нулевой вектор  является тождественным преобразованием.
является тождественным преобразованием.
Параллельный перенос отображает прямую на параллельную ей прямую либо на себя; плоскость на параллельную ей плоскость либо на себя.
Неподвижных точек параллельный перенос на ненулевой вектор не имеет.
Неподвижными прямыми при параллельном переносе на вектор  являются прямые, параллельные этому вектору.
являются прямые, параллельные этому вектору.
Неподвижными плоскостями при параллельном переносе на вектор  являются плоскости, параллельные этому вектору.
являются плоскости, параллельные этому вектору.
Поворот на данный угол вокруг данной оси:
Определение:
Поворотом пространства на угол φ вокруг прямой n называется такое преобразование пространства, при котором любая точка прямой остается неподвижной и в любой плоскости, перпендикулярной прямой n, осуществляется поворот этой плоскости на угол φ вокруг точки ее пересечения с прямой n.

Рисунок 5 – Поворот вокруг прямой
Неподвижными точками являются любая точка оси вращения.
Неподвижной прямой является ось поворота.
Неподвижной плоскостью является любая плоскость, перпендикулярная оси поворота.
Поворот вокруг оси на угол 1800 является осевой симметрией.
Примеры и разбор решения заданий тренировочного модуля
Дан треугольника АВС: А(3,- 2, 4), В (4, 6, 0), С (2, 2, 2)
В какую точку перейдет центр О пересечения медиан данного треугольника при:
|
Преобразование |
Координата образа |
|
Параллельный перенос на вектор (2; -2; 3) |
(5; 0; 5) |
|
Симметрия относительно начала координат |
(-3; -2; -2) |
|
Симметрия относительно координатной плоскости ZOY |
(-3; 2; 2) |
|
Поворот на угол 1800 относительно координатной оси OZ |
(-3; -2; 2) |
|
Симметрия относительно плоскости х=2 |
(1; 2; 2) |
Решение:
Найдем точку пересечения медиант данного треугольника.
Найдем координаты точки М — середины отрезка ВС:
М ( ); М(3; 4; 1)
); М(3; 4; 1)
Так как медианы треугольника пересекаются в одной точке и делятся в отношении 2:1, считая от вершины, то можем найти координаты точки О, зная координаты А и М:
О (3; 2; 2).
Теперь найдем координаты образа точки О при каждом из преобразований:.
- Параллельный перенос на вектор (2; -2; 3) означает, что координаты образа получаются так:
 (2; -2; 3) означает, что координаты образа получаются так:
(2; -2; 3) означает, что координаты образа получаются так: . То есть координаты образа: (5; 0; 5)
. То есть координаты образа: (5; 0; 5)
- Симметрия относительно начала координат задается уравнениями:
 . То есть координаты образа: (-3; -2; -2)
. То есть координаты образа: (-3; -2; -2)
- Симметрия относительно координатной плоскости ZOY задается уравнениями:
 (ордината и аппликата точки остаются такими же, а абсцисса меняет знак). То есть координаты образа: (-3; 2; 2).
(ордината и аппликата точки остаются такими же, а абсцисса меняет знак). То есть координаты образа: (-3; 2; 2).
- Поворот на угол 1800 относительно координатной оси OZ означает симметрию относительно координатной оси OZ и задается уравнениями:
 (аппликата точки остается такой же, а ордината и абсцисса меняют знак). То есть координаты образа: (-3; -2; 2).
(аппликата точки остается такой же, а ордината и абсцисса меняют знак). То есть координаты образа: (-3; -2; 2).
- Симметрия относительно плоскости α: х=2.
Эта плоскость параллельная плоскости ZOY, поэтому ордината и аппликата точки остаются такими же. Так как абсцисса токи О хо =3, то расстояние от точки до плоскости α равно 1. Точка, симметричная точке О относительно плоскости α, будет иметь абсциссу, равную хо’ =1.
Поэтому координаты образа (1; 2; 2).
Аффинные преобразования плоскости
Преобразование плоскости задается двумя скалярными функциями двух переменных:
или, что то же самое, вектор-функцией
Формула аффинного преобразования плоскости
Пусть на плоскости фиксирована аффинная система координат . Преобразование
плоскости называется аффинным, если координаты
образа
выражаются через координаты
прообраза
по формулам
(2.11)
где — невырожденная матрица (матрица аффинного преобразования),
координатные столбцы образа
и прообраза
(координатные столбцы радиус-векторов
и
) соответственно,
— координатный столбец образа начала координат, или вектора переноса начала координат. В формулах аффинного преобразования (2.11) подчеркивается зависимость матрицы преобразования и координат векторов от выбранной системы координат. Обозначение системы координат в (2.11) будем опускать, если понятно, в какой системе координат задано преобразование.
Замечания 2.4
1. Столбец в (2.11) определяет координаты образа
начала координат. Действительно, подставляя координаты
точки
в (2.11), получаем координаты
точки
. Можно сказать, что при аффинном преобразовании начало координат переносится на вектор а=00 , координатный столбец которого равен
.
2. Аффинное преобразование (2.11) в любой другой аффинной системе координат задается формулами того же вида.
Действительно, пусть известны: матрица перехода от старого базиса
к новому базису
и координатный столбец
вектора переноса начала координат
(рис.2.17). Тогда по формуле (2.8) имеем
где
и
— координатные столбцы точек
(радиус-векторов
,
и
,
) в старой
и новой
системах координат.
Подставляя в (2.11), получаем
Учитывая, что матрица обратимая (см. свойство 2 матриц перехода в разд.2.2.1), выражаем координатный столбец
образа
через координатный столбец
прообраза
в системе координат
:
В результате получили аффинное преобразование вида (2.11):
с матрицей и координатным столбцом
вектора переноса.
Таким образом, связь матриц одного и того же аффинного преобразования в разных базисах, а также координатных столбцов вектора переноса, имеет вид
(2.12)
где — матрицы (
— координатные столбцы вектора переноса) аффинного преобразования в старом и новом базисах, a
— матрица перехода от старого базиса к новому.
3. Запишем (2.11), обозначив образ точки через
:
(2.13)
Сравнивая формулы (2.13) аффинного преобразования плоскости с формулами (2.8) аффинного преобразования координат, заключаем, что эти соотношения: и
будут равносильными, если положить
и
. Действительно, умножая обе части равенства
, следующего из первого соотношения, на матрицу
слева, с учетом равенства
получаем
, т.е.
, что равносильно
. Таким образом, изменение координат точки будет одно и то же, подвергаем ли мы плоскость аффинному преобразованию, оставляя систему координат неизменной, или же оставляем плоскость неизменной, подвергая систему координат обратному преобразованию.
4. Аффинное преобразование плоскости порождает преобразование векторов на плоскости, если рассматривать векторы как упорядоченные пары точек, а именно: при аффинном преобразовании каждому вектору
(рассматриваемому как упорядоченная пара точек
) ставится в соответствие вектор
(
, причем
), координаты которого выражаются через координаты прообраза
no формулам:
(2.14)
где — координатные столбцы векторов
(относительно одного и того же базиса),
— матрица аффинного преобразования (в том же базисе).
Это свойство следует из правила нахождения координат вектора, согласно которому из координат конца вектора надо вычесть координаты его начала. Если — координатные столбцы точек
соответственно, то учитывая (2.13):
,
и, получаем
что и требовалось доказать.
Способы задания аффинного преобразования плоскости
Первый способ. Чтобы задать аффинное преобразование плоскости по определению, достаточно указать систему координат и формулы (2.11), т.е. задать невырожденную матрицу
преобразования и координатный столбец
в (2.11).
Второй способ. Пусть на плоскости заданы две аффинные системы координат: старая и новая
(рис.2.18). Тогда существует единственное аффинное преобразование
плоскости, которое каждой точке
ставит в соответствие точку
, координаты которой в новой системе координат
совпадают с координатами точки
в старой системе координат.
Действительно, пусть — вектор переноса начала координат,
— матрица перехода от старого базиса
к новому базису
. Тогда, учитывая (2.8), имеем
. Подставляя
(координаты образа
в новой системе координат совпадают с координатами прообраза
в старой системе координат), получаем аффинное преобразование
вида (2.11) с невырожденной матрицей и столбцом
. Существование аффинного преобразования доказано. Докажем единственность от противного. Пусть преобразование
удовлетворяет тем же условиям, что и
, но для некоторой (хотя бы одной) точки
образы
и
не совпадают. Тогда в новой системе координат
разные точки
и
будут иметь равные координаты (такие же, как координаты точки
в старой системе координат
), чего быть не может (см. пункт 1 замечаний 2.1). Полученное противоречие доказывает единственность аффинного преобразования.
Таким образом, аффинное преобразование (2.15) может быть задано указанием двух аффинных систем координат. Говорят, что аффинное преобразование задано переходом от одной аффинной системы координат к другой.
Третий способ. Аффинное преобразование плоскости вполне определяется образами трех данных точек, не лежащих на одной прямой, т.е. существует единственное аффинное преобразование, переводящее три точки , не лежащие на одной прямой, в три точки
, также не лежащие на одной прямой.
В самом деле, заданные точки и
порождают две аффинные системы координат
и
, где
и
— пары базисных (неколлинеарных) векторов, и тем самым однозначно определяют аффинное преобразование.
Пример 2.7. В прямоугольной системе координат заданы точки (рис.2.19):
Требуется вывести формулы (2.11) аффинного преобразования , отображающего точки
в точки
, и найти координаты образа
точки
:
а) в системе координат ;
б) в заданной прямоугольной системе координат.
Решение. а) Искомое преобразование отображает систему координат
в систему координат
, где
,
. Формулы, задающие такое преобразование
, имеют вид (2.15), где
— координатный столбец вектора
в базисе
, а
— матрица перехода от базиса
к базису
. По рис.2.19, учитывая, что
и
определяем разложения векторов
по базису
:
Следовательно, в системе координат преобразование (2.15) имеет вид
поскольку согласно (2.2) матрица перехода формируется путем записи по столбцам координат векторов в базисе
.
Найдем координаты образа точки . В системе координат
точка
имеет координаты
,так как
. Подставляя в найденные формулы координаты прообраза, получаем искомые координаты образа:
то есть
Заметим, что в новой системе координат точка
имеет координаты
, которые совпадают с координатами точки
в старой системе координат
.
б) Подставляя в (2.11) координаты образов и прообразов, получаем:
Вычитая первое уравнение из второго и третьего, получаем
и
т.е.
Решая эту систему, находим элементы матрицы , после чего определяем столбец
. Таким образом, искомое преобразование
в заданной прямоугольной системе координат имеет вид
Найдем координаты образа точки :
то есть
.
Получим теперь формулы аффинного преобразования в системе координат
, используя связи (2.12). Учитывая, что переход от прямоугольной системы координат
системе координат
определяется матрицей
столбцом
поскольку
,
,
находим
что совпадает с результатами пункта «а».
Свойства аффинных преобразований плоскости
1. Аффинное преобразование взаимно однозначное, кроме того:
а) преобразование, обратное к аффинному, является также аффинным;
б) композиция аффинных преобразований является также аффинным преобразованием.
2. При аффинном преобразовании векторы преобразуются следующим образом:
г) равные векторы — в равные;
б) коллинеарные — в коллинеарные, причем отношение коллинеарных векторов сохраняется;
в) неколлинеарные — в неколлинеарные.
3. При аффинном преобразовании сохраняется отношение, в котором точка делит отрезок.
4. При аффинном преобразовании (2.11) площадь любого параллелограмма изменяется в одном и том же отношении, т.е. умножается на одно и то же число (называемое коэффициентом искажения площади): , где
— площадь параллелограмма, a
— площадь образа этого параллелограмма. Другими словами, коэффициент искажения площади при аффинном преобразовании равен модулю определителя матрицы этого преобразования.
Первое свойство следует из обратимости матрицы аффинного преобразования, поскольку из (2.11) можно выразить координаты прообраза через координаты образа:
Заметим, что эти формулы имеют тот же вид, что и (2.11), т.е. преобразование, обратное к аффинному, является аффинным преобразованием с матрицей и вектором переноса
. Композиция аффинных преобразований
и
:
также является аффинным преобразованием с матрицей (невырожденной в силу невырожденности
и
) и вектором переноса
.
Докажем второе свойство. Пусть ненулевые векторы и
коллинеарны, причем
. Надо доказать, что их образы
и
также коллинеарны и
. Действительно, если
и
— координатные столбцы векторов
и
, то
. Тогда для координатных столбцов
и
(векторов
и
) по формуле (2.14) получаем (см. пункт 4 замечаний 2.4):
то есть
Следовательно, , т.е. векторы
и
коллинеарны и
. Если же хотя бы один из векторов нулевой, например,
, то его образ (по свойству 2) также нулевой вектор
, который коллинеарен любому вектору
. При
получаем, что равные векторы преобразуются в равные. Наконец, неколлинеарные векторы не могут преобразоваться в коллинеарные, поскольку в этом случае при обратном преобразовании коллинеарные векторы преобразуются в неколлинеарные, что противоречит пункту 2,»б».
Третье свойство следует из второго (см. пункт 2,»б»). Действительно, пусть точки отображаются в точки
соответственно. Если точка
делит отрезок
в отношении
, то векторы
и
коллинеарные и
. По свойству 2 пункта «б» векторы
и
также коллинеарны и
, т.е. точка
делит отрезок
в отношении
Обсудим четвертое свойство. На рис.2.20 заштрихованы параллелограмм, построенный на базисных векторах , и его образ (параллелограмм, построенный на базисных векторах
). Справедливость утверждения для параллелограммов следует из свойства 3 матрицы перехода от одного базиса к другому. Любой параллелограмм разбивается диагональю на два равных треугольника. Следовательно, утверждение справедливо для треугольников, а значит и для многоугольников, поскольку любой многоугольник разбивается на конечное число треугольников. Средствами математического анализа это свойство может быть распространено на произвольную измеримую плоскую фигуру.
Замечания 2.5
1. Третье свойство является характеристическим для аффинного преобразования и может быть взято в качестве эквивалентного определения.
2. Преобразование (2.11) для произвольной квадратной матрицы (быть может, вырожденной) называется линейным, при этом матрица
называется матрицей линейного преобразования. Любое аффинное преобразование является линейным, но не всякое линейное преобразование является аффинным.
3. Квадратные матрицы и
, связанные соотношением
, называются подобными, а матрица
— преобразующей. В силу (2.12) матрицы аффинного преобразования в разных базисах оказываются подобными, причем преобразующей матрицей служит матрица перехода от одного базиса к другому.
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.