Цилиндрическая система координат (цилиндрические координаты)
Для введения цилиндрической системы координат в пространстве выбирается плоскость (основная плоскость) и на ней задается полярная система координат с полюсом и полярной осью
. Через точку
перпендикулярно основной плоскости проведем ось
(ось аппликат) и выберем ее направление так, чтобы возрастание полярного угла, наблюдаемое со стороны положительного направления оси
, происходило против часовой стрелки (рис.2.34,а).
В цилиндрической системе координат положение точки , не принадлежащей оси аппликат, характеризуется полярными координатами
точки
— ортогональной проекции точки
на основную плоскость, и аппликатой
— координатой точки
— ортогональной проекции точки
на ось аппликат. Таким образом, цилиндрические координаты точки
— это упорядоченная тройка чисел
— полярный радиус
, полярный угол
и аппликата
. У точек, принадлежащих оси аппликат, не определен полярный угол, они задаются указанием нулевого полярного радиуса и аппликатой.
Переход от цилиндрических координат к декартовым (прямоугольным)
С цилиндрической системой координат можно связать прямоугольную систему координат
(рис.2.34,б), у которой начало и базисные векторы
совпадают с началом цилиндрической системы координат и единичными векторами на полярной оси и оси аппликат соответственно, а базисный вектор
выбирается так, чтобы тройка
была правой (при этом базис оказывается стандартным).
Наоборот, если в пространстве задана правая прямоугольная система координат, то, приняв положительную полуось абсцисс за полярную ось, получим цилиндрическую систему координат (связанную с данной прямоугольной).
Поскольку аппликата точки
в прямоугольной системе координат и аппликата
в цилиндрической системе координат совпадают, то формулы, связывающие между собой прямоугольные координаты
точки
и ее цилиндрические координаты
, имеют вид, следующий из
(2.19)
Эти формулы перехода позволяют найти прямоугольные координаты по известным цилиндрическим. Обратный переход выполняется по формулам
(2.20)
Главное значение полярного угла находится по формулам (см. рис.2.29).
Пример 2.12. В цилиндрической системе координат :
а) построить координатные поверхности ;
б) найти цилиндрические координаты точки , если известны ее прямоугольные координаты
;
в) найти прямоугольные координаты точки , если известны ее цилиндрические координаты:
.
Решение. а) Координатной поверхностью , т.е. геометрическим местом точек
при фиксированном значении полярного радиуса
, является прямой круговой цилиндр, ось которого параллельна оси аппликат (рис.2.35). Этим объясняется название цилиндрической системы координат. Координатной поверхностью
, т.е. геометрическим местом точек
при фиксированном значении полярного угла
, является полуплоскость, ограниченная осью аппликат (на рис.2.35 изображены полуплоскости
и
). Координатной поверхностью
, т.е. геометрическим местом точек
при фиксированном значении аппликаты
, является плоскость, перпендикулярная оси аппликат (на рис.2.35 изображены плоскости
и
).
б) Найдем цилиндрические координаты точки . Аппликата
, полярный радиус и полярный угол находим по формулам (2.20) (см. пример 2.11):
так как и ортогональная проекция точки
на координатную плоскость
(основную плоскость) лежит в IV четверти.
в) Найдем прямоугольные координаты точки . По формулам (2.19) вычисляем (см. пример 2.10):
Также см. преобразования систем координат.
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.
Рассмотрим
в пространстве координатную плоскость
Р, на которой задана полярная система
координат. ПустьOz –координатная
ось, перпендикулярная плоскостиРи пересекающая ее в полюсеО.
Координатная осьOz направлена так,
чтобы из конца положительного направления
осиOz направление отсчета положительных
значений полярного углаφот полярной
осиОхбыло видно против часовой
стрелки. Совокупность этих элементов
называетсяполярной системой
координат в пространстве(рис.3.2).
Координатная
плоскость Рназываетсяэкваториальной,
а координатная осьOz–зенитной.
Для удобства будем полагать, что
масштабные отрезки одинаковы (ОЕ1=ОЕ2) и точка отсчетаОкоординатной осиOzсовпадает с
полюсомО.
Цилиндрическими
координатами точкиМ, не лежащими
на зенитной оси, называется упорядоченная
тройка чиселρ, φ, z, гдеρиφ– полярные координаты ортогональной
проекцииМр точкиМна экваториальную плоскость, аz–
координата на зенитной осиOzпроекцииМz точкиМна зенитную
ось (рис. 3.3). Для точек зенитной оси
считаютρ = 0,φ– любое число, аzопределяется так, как указано выше.
Тот факт, чтоρ, φ иzесть
цилиндрические координаты точкиМ в
пространстве, записывают так:М(ρ,φ,z).
Заметим,
что при помощи цилиндрических координат
не устанавливается взаимно однозначного
соответствия между множеством всех
точек геометрического пространства и
множеством упорядоченных троек
действительных чисел.
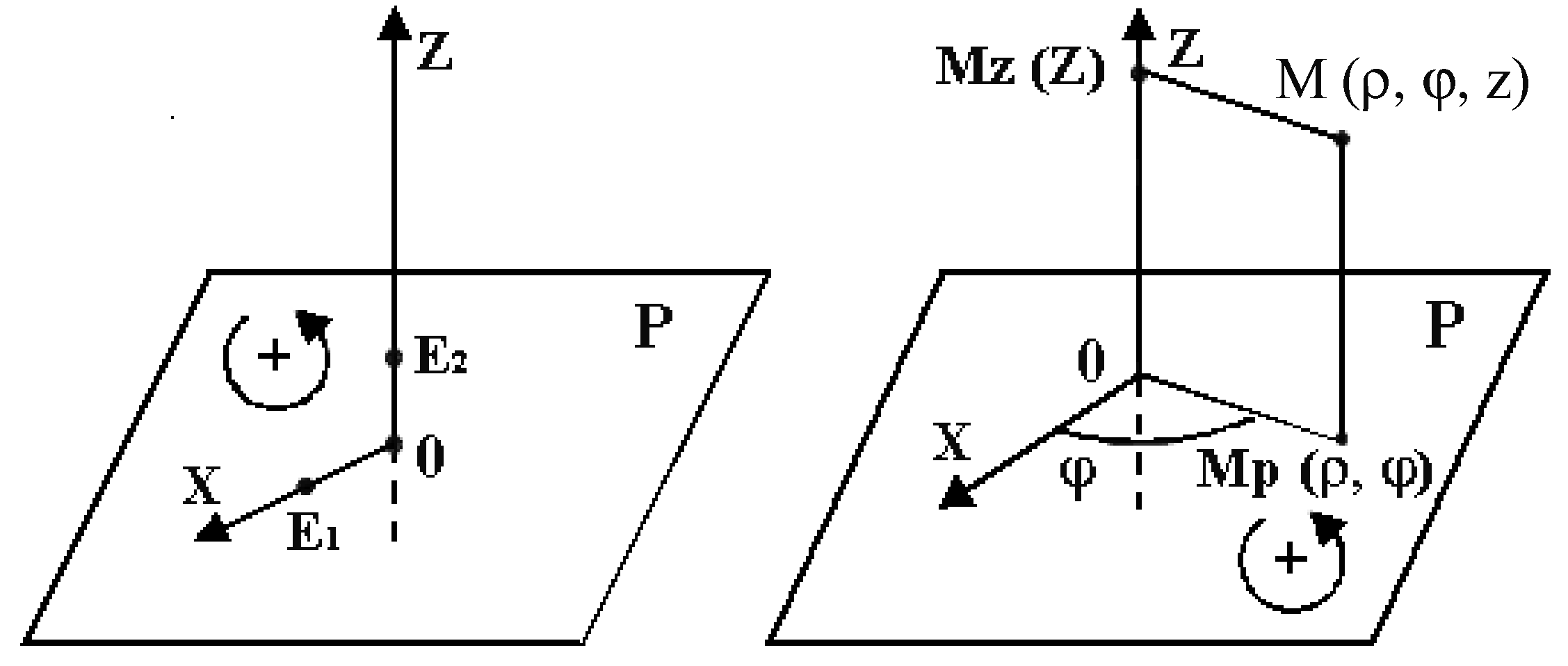
Рис. 3.2
Рис. 3.3
Сферическими
координатами точкиМ, не лежащей
на зенитной оси, называется упорядоченная
тройка чиселr, φ, Θ, гдеr– длина отрезкаОМ,φ– угол от
полярной осиОхдо лучаОМр(Мр– проекция точкиМна экваториальную плоскость), аΘ–
угол между лучамиОМриОМ, который принимает значения в
интервале![]() ,
,
причем считается, чтоΘ= 0, если точкаМлежит в экваториальной плоскости,Θ> 0, если лучОМобразует острый
угол с зенитной осью, иΘ< 0, если
лучОМобразует тупой угол с зенитной
осью (рис.3.4).

Рис. 3.4
Если
точка М лежит на зенитной оси и не
совпадает с полюсомО, то считают,
чтоφ– любое число, а![]() или
или![]() в зависимости от того, совпадает ли
в зависимости от того, совпадает ли
направление лучаОМ с направлением
зенитной оси или противоположно ему.
Для полюса считаютr= 0,φиΘ– любые числа. При помощи сферических
координат не устанавливается взаимно
однозначного соответствия между
множеством всех точек пространства и
множеством упорядоченных троек
действительных чисел.
Найдем
зависимости между прямоугольными
декартовыми координатами точки М(х,
у, z) и ее цилиндрическими координатамиМ(ρ, φ, z) и сферическими
координатамиМ(r, φ, θ).
Введем декартову прямоугольную систему
координат, принимая за положительную
полуосьОхполярную ось, за осьОу– ось, полученную из осиОхповоротом
ее вокруг полюса в экваториальной
плоскости на угол![]() и зенитную ось за осьОz
и зенитную ось за осьОz
(рис.3.4.).
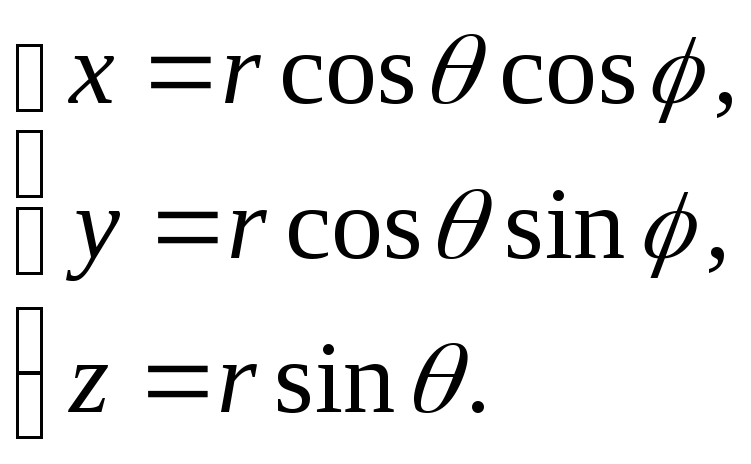
Из
рис.3.4, учитывая формулы (1.7) и рис.3.3.
находим
![]() ,
,![]() ,z= z(1.12)
,z= z(1.12)
Cдругой стороны,![]() ,
,
а![]() ,
,
значит,
 (1.13)
(1.13)
Формулы
(1.12) и (1.13) верны и для того случая, когда
точка Млежит на зенитной оси и когда
она совпадает с полюсом (при дополнительных
соглашениях о величинахρ иφв
этом случае).
По
формулам (1.12) вычисляются декартовы
прямоугольные координаты точки Мв случае, если известны ее цилиндрические
координаты, а по формулам (1.13) – если
известны ее сферические координаты.
Из
формул (1.13) следует, что
![]()
откуда
![]()
значит,
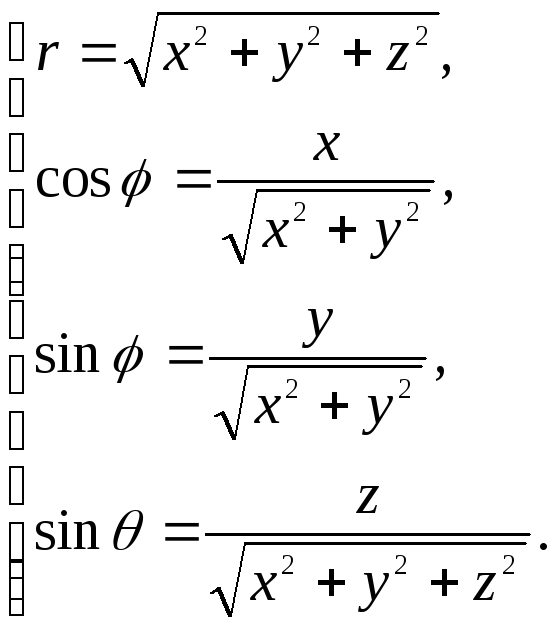 (1.14)
(1.14)
По этим
формулам вычисляются сферические
координаты r,φ, ΘточкиМ,
не лежащей на зенитной оси по ее декартовым
прямоугольным координатамx,y,z
(при указанном взаимном расположении
этих двух систем координат).
Цилиндрические
координаты ρ, φ, zточкиМ
вычисляются по ее декартовым
прямоугольным координатамx, y,
zиз формул (1.12) с учетом формул (1.8) и
(1.9) или (1.10).
Аналогично
декартовым координатам определяется
уравнение поверхности в сферических
координатах:
![]()
и в цилиндрических
координатах
![]() .
.
Замечание.Вторую сферическую координатуφчасто называютдолготой, третьюΘ – широтой. Иногда вместо
широтыΘрассматривают уголψ
между положительным направлением
зенитной оси и лучомОМ, идущим из
полюсаО в данную точкуМ; величинаψизменяется в пределах от 0 доπ.
Величинаψназываетсязенитным
расстоянием.
Так
как
![]() ,
,
то в формулах (1.13) и (1.14) (в случае, если
за третью сферическую координату
принимается зенитное расстояние)![]() и
и![]() следует заменить соответственно на
следует заменить соответственно на![]() и
и
![]() .
.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Конев В.В. Скалярные и векторные поля
![]()
![]()
Цилиндрическая система координат
![]()
![]()
Цилиндрическая система координат представляет собой трёхмерную систему координат, являющуюся обобщением полярной системы координат посредством добавления третьей координаты, которая задаёт смещение произвольной точки M вдоль оси 0z относительно координатной плоскости 0xy. Положение точки M в цилиндрической системе координат определяется тройкой чисел ρ, φ и z, где ρ – расстояние от точки M до оси 0z (
 ); φ – угол, образованный проекцией радиус-вектора точки M на плоскость 0ху с положительным направлением оси 0х (
); φ – угол, образованный проекцией радиус-вектора точки M на плоскость 0ху с положительным направлением оси 0х ( ); z – проекция точки M на ось 0z (
); z – проекция точки M на ось 0z ( ).
).
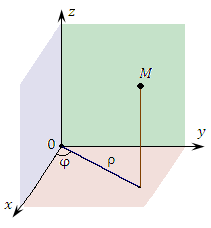
Рис. 1. Цилиндрические координаты точки M.
![]()
Связь между декартовыми и цилиндрическими координатами описывается формулами

Поверхность, на которой одна из координат сохраняет постоянное значение, называется координатной поверхностью.
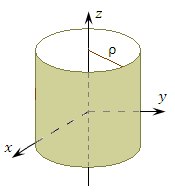
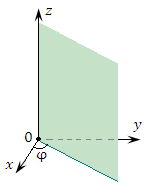
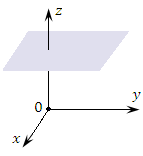
Рис. 2. Координатные поверхности цилиндрической системы координат:
круговой цилиндр (ρ = const);
полуплоскость (φ = const);
плоскость (z = const).
![]()
Линия, вдоль которой изменяется только одна координата, а остальные координаты остаются неизменными, называется координатной линией.
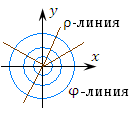
Рис. 3. Координатные ρ-линии (лучи) и φ-линии (окружности) цилиндрической системы координат.
Координатная z-линия (прямая) направлена перпендикулярно плоскости 0xy.
![]()
В цилиндрической системе координатные линии, проходящие через любую точку M пространства, пересекаются под прямым углом. Такие системы координат называются ортогональными.
![]()
Единичный касательный вектор к координатной линии в точке М, направленный в сторону возрастания координаты, называется ортом в точке М. Поскольку цилиндрическая система координат является ортогональной, то в любой точке пространства векторы  и
и  попарно ортогональны.
попарно ортогональны.
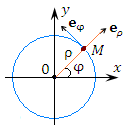
Рис. 4. Орты  и
и  цилиндрической системы координат.
цилиндрической системы координат.
Вектор направлен перпендикулярно плоскости 0xy.
![]()
Отметим, что каждая координатная линия перпендикулярна соответствующей координатной поверхности.
Некоторые полезные формулы:![]()
-
Элемент длины дуги:

-
Элемент площади поверхности:
-
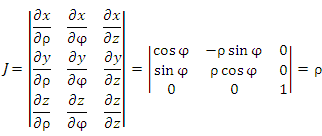
Якобиан перехода от декартовой системы координат к цилиндрической:
-
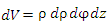
Элемент объема:


Цилиндрическая система координат вектора
Цилиндрическая система координат (цилиндрические координаты)
Для введения цилиндрической системы координат в пространстве выбирается плоскость ( основная плоскость ) и на ней задается полярная система координат с полюсом и полярной осью . Через точку перпендикулярно основной плоскости проведем ось ( ось аппликат ) и выберем ее направление так, чтобы возрастание полярного угла, наблюдаемое со стороны положительного направления оси , происходило против часовой стрелки (рис.2.34,а).
В цилиндрической системе координат положение точки , не принадлежащей оси аппликат, характеризуется полярными координатами точки — ортогональной проекции точки на основную плоскость, и аппликатой — координатой точки — ортогональной проекции точки на ось аппликат. Таким образом, цилиндрические координаты точки — это упорядоченная тройка чисел — полярный радиус , полярный угол и аппликата . У точек, принадлежащих оси аппликат, не определен полярный угол, они задаются указанием нулевого полярного радиуса и аппликатой.
Переход от цилиндрических координат к декартовым (прямоугольным)
С цилиндрической системой координат можно связать прямоугольную систему координат (рис.2.34,б), у которой начало и базисные векторы совпадают с началом цилиндрической системы координат и единичными векторами на полярной оси и оси аппликат соответственно, а базисный вектор выбирается так, чтобы тройка была правой (при этом базис оказывается стандартным).
Наоборот, если в пространстве задана правая прямоугольная система координат, то, приняв положительную полуось абсцисс за полярную ось, получим цилиндрическую систему координат ( связанную с данной прямоугольной ).
Поскольку аппликата точки в прямоугольной системе координат и аппликата в цилиндрической системе координат совпадают, то формулы, связывающие между собой прямоугольные координаты точки и ее цилиндрические координаты , имеют вид, следующий из
Эти формулы перехода позволяют найти прямоугольные координаты по известным цилиндрическим. Обратный переход выполняется по формулам
Главное значение полярного угла находится по формулам (см. рис.2.29).
Пример 2.12. В цилиндрической системе координат :
а) построить координатные поверхности ;
б) найти цилиндрические координаты точки , если известны ее прямоугольные координаты ;
в) найти прямоугольные координаты точки , если известны ее цилиндрические координаты: .
Решение. а) Координатной поверхностью , т.е. геометрическим местом точек при фиксированном значении полярного радиуса , является прямой круговой цилиндр, ось которого параллельна оси аппликат (рис.2.35). Этим объясняется название цилиндрической системы координат. Координатной поверхностью , т.е. геометрическим местом точек при фиксированном значении полярного угла , является полуплоскость, ограниченная осью аппликат (на рис.2.35 изображены полуплоскости и ). Координатной поверхностью , т.е. геометрическим местом точек при фиксированном значении аппликаты , является плоскость, перпендикулярная оси аппликат (на рис.2.35 изображены плоскости и ).
б) Найдем цилиндрические координаты точки . Аппликата , полярный радиус и полярный угол находим по формулам (2.20) (см. пример 2.11):
так как и ортогональная проекция точки на координатную плоскость (основную плоскость) лежит в IV четверти.
в) Найдем прямоугольные координаты точки . По формулам (2.19) вычисляем (см. пример 2.10):
Цилиндрические координаты: система, изменение и упражнения
Содержание:
В цилиндрические координаты Они используются для определения местоположения точек в трехмерном пространстве и состоят из радиальной координаты ρ, азимутальной координаты φ и координаты высоты. z.
Точка п расположенная в пространстве проецируется ортогонально на плоскость XY приводя к сути П ‘ в этом самолете. Расстояние от начала координат до точки П ‘ определяет координату ρ, а угол, образованный осью Икс с лучом OP ‘ определяет координату φ. Наконец, координата z ортогональная проекция точки п на оси Z. (см. рисунок 1).
Радиальная координата ρ всегда положительна, азимутальная координата φ изменяется от нуля радиан до двух пи радиан, а координата z может принимать любое действительное значение:
База вектора в цилиндрических координатах
База цилиндрических единичных векторов определяется Uρ, Uφ, Уз.
Вектор Uρ касается прямой φ = ctte и z = ctte (направленной радиально наружу), вектор Uφ касается прямой ρ = ctte, z = ctte и, наконец, Уз имеет то же направление оси Z.
В основании цилиндрического блока вектор положения р точки P записывается векторно так:
р = ρ Uρ + 0 Uφ + z Уз
С другой стороны, бесконечно малое смещение dр из точки P это выражается следующим образом:
dр = dρ Uρ + ρ dφ Uφ + дз Уз
Точно так же бесконечно малый элемент объема dV в цилиндрических координатах равен:
Примеры
Существует бесчисленное множество примеров использования и применения цилиндрических координат. В картографии, например, цилиндрическая проекция, исходя именно из этих координат. Еще примеры:
Пример 1
Цилиндрические координаты находят применение в технике. В качестве примера у нас есть система размещения данных на жестком диске CHS (Cylinder-Head-Sector), которая фактически состоит из нескольких дисков:
— Цилиндр или дорожка соответствует координате ρ.
— Сектор соответствует положению φ диска, вращающегося на высокой угловая скорость.
— Головка соответствует положению z считывающей головки на соответствующем диске.
Каждый байт информации имеет точный адрес в цилиндрических координатах (C, S, H).
Пример 2
Строительные краны фиксируют положение груза в цилиндрических координатах. Горизонтальное положение определяется расстоянием до оси или стрелкой крана ρ и его угловым положением φ относительно некоторой исходной оси. Вертикальное положение груза определяется координатой z высоты.
Решенные упражнения
Упражнение 1
Есть точки P1 с цилиндрическими координатами (3, 120º, -4) и точка P2 с цилиндрическими координатами (2, 90º, 5). Найди Евклидово расстояние между этими двумя точками.
Решение: Прежде всего, мы переходим к нахождению декартовых координат каждой точки по формуле, приведенной выше.
P1 = (3 * cos 120º, 3 * sin 120º, -4) = (-1,5, 2,60, -4)
P2 = (2 * cos 90º, 2 * sin 90º, 5) = (0, 2, 5)
Евклидово расстояние между точками P1 и P2 равно:
d (P1, P2) = √ ((0 — (-1,5)) 2 +(2 – 2.60) 2 +(5 -(-4)) 2 ) =…
Упражнение 2.
Точка P имеет декартовы координаты (-3, 4, 2). Найдите соответствующие цилиндрические координаты.
Решение: Переходим к нахождению цилиндрических координат, используя приведенные выше соотношения:
ρ = √ (x 2 + и 2 ) = √((-3) 2 + 4 2 ) = √(9 + 16) = √(25) = 5
φ = arctan (y / x) = arctan (4 / (- 3)) = -53,13º + 180º = 126,87º
Следует помнить, что функция арктангенса является многозначной с периодичностью 180º. Кроме того, угол φ должен принадлежать второму квадранту, поскольку координаты x и y точки P находятся в этом квадранте. Это причина, по которой к результату φ было добавлено 180 °.
Упражнение 3.
Выразите в цилиндрических координатах и декартовых координатах поверхность цилиндра радиуса 2, ось которого совпадает с осью Z.
Решение: Подразумевается, что цилиндр имеет бесконечную протяженность в направлении z, поэтому уравнение указанной поверхности в цилиндрических координатах имеет вид:
Чтобы получить декартово уравнение цилиндрической поверхности, берется квадрат обоих членов предыдущего уравнения:
Умножаем на 1 оба члена предыдущего равенства и применяем фундаментальное тригонометрическое тождество (сен 2 (φ) + cos 2 (φ) =1 ):
(сен 2 (φ) + cos 2 (φ) ) * ρ 2 = 1 * 4
Скобка предназначена для получения:
(ρ sin (φ)) 2 + (ρ cos (φ)) 2 = 4
Мы помним, что первые круглые скобки (ρ sin (φ)) — это координата y точки в полярных координатах, а круглые скобки (ρ cos (φ)) представляют координату x, поэтому мы имеем уравнение цилиндра в декартовых координатах:
Вышеупомянутое уравнение не следует путать с уравнением окружности в плоскости XY, так как в этом случае оно будет выглядеть так: .
Упражнение 4.
Цилиндр с радиусом R = 1 м и высотой H = 1 м имеет свою массу, распределенную радиально в соответствии со следующим уравнением: D (ρ) = C (1 — ρ / R), где C — постоянная величина C = 1 кг / м. 3 . Найдите общую массу цилиндра в килограммах.
Решение: Во-первых, необходимо понять, что функция D (ρ) представляет объемную массовую плотность и что массовая плотность распределена в цилиндрических оболочках с уменьшающейся плотностью от центра к периферии. Бесконечно малый элемент объема в соответствии с симметрией задачи:
Следовательно, бесконечно малая масса цилиндрической оболочки будет:
Следовательно, общая масса цилиндра будет выражаться следующим образом: определенный интеграл:
M = ∫или р D (ρ) dV = ∫или р C (1 — ρ / R) ρ dρ 2π H = 2π H C ∫или р (1 — ρ / R) ρ dρ
Решение указанного интеграла получить нетрудно, его результат:
∫или р (1 — ρ / R) ρ dρ = (⅙) R 2
Включая этот результат в выражение массы цилиндра, получаем:
M = 2π H C (⅙) R 2 = ⅓ π H C R 2 =
⅓ π 1м * 1кг / м 3 * 1 м 2 = π / 3 кг ≈ 1,05 кг
Цилиндрическая система координат
Для введения цилиндрической системы координат в пространстве выбирается плоскость (основная плоскость) и на ней задается полярная система координат с полюсом О и полярной осью Ох. Через точку О перпендикулярно основной плоскости проведем ось Oz (ось аппликат) и выберем ее направление так, чтобы возрастание полярного угла, наблюдаемое со стороны положительного направления оси Oz, происходило против часовой стрелки (рис.2.34,а).
В цилиндрической системе координат положение точки М, не принадлежащей оси аппликат, характеризуется полярными координатами г, (р точки — ортогональной проекции точки М на основную плоскость, и аппликатой z — координатой точки Mz — ортогональной проекции точки М на ось аппликат. Таким образом, цилиндрические координаты ки М — это упорядоченная тройка чисел г, (р, z — полярный радиус (г > 0), полярный угол (- п г а = >1 х а + Уа = 7 42 +(“ 3 ) 2 = 5 ’ Фл = arct g— = arctg—= -arctg j; zA = 2, x a 4 4
Цилиндрическая система координат (цилиндрические координаты)
Для введения цилиндрической системы координат в пространстве выбирается плоскость ( основная плоскость ) и на ней задается полярная система координат с полюсом и полярной осью . Через точку перпендикулярно основной плоскости проведем ось ( ось аппликат ) и выберем ее направление так, чтобы возрастание полярного угла, наблюдаемое со стороны положительного направления оси , происходило против часовой стрелки (рис.2.34,а).
В цилиндрической системе координат положение точки , не принадлежащей оси аппликат, характеризуется полярными координатами точки — ортогональной проекции точки на основную плоскость, и аппликатой — координатой точки — ортогональной проекции точки на ось аппликат. Таким образом, цилиндрические координаты точки — это упорядоченная тройка чисел — полярный радиус , полярный угол и аппликата . У точек, принадлежащих оси аппликат, не определен полярный угол, они задаются указанием нулевого полярного радиуса и аппликатой.
Переход от цилиндрических координат к декартовым (прямоугольным)
С цилиндрической системой координат можно связать прямоугольную систему координат (рис.2.34,б), у которой начало и базисные векторы совпадают с началом цилиндрической системы координат и единичными векторами на полярной оси и оси аппликат соответственно, а базисный вектор выбирается так, чтобы тройка была правой (при этом базис оказывается стандартным).
Наоборот, если в пространстве задана правая прямоугольная система координат, то, приняв положительную полуось абсцисс за полярную ось, получим цилиндрическую систему координат ( связанную с данной прямоугольной ).
Поскольку аппликата точки в прямоугольной системе координат и аппликата в цилиндрической системе координат совпадают, то формулы, связывающие между собой прямоугольные координаты точки и ее цилиндрические координаты , имеют вид, следующий из
Эти формулы перехода позволяют найти прямоугольные координаты по известным цилиндрическим. Обратный переход выполняется по формулам
Главное значение полярного угла находится по формулам (см. рис.2.29).
Пример 2.12. В цилиндрической системе координат :
а) построить координатные поверхности ;
б) найти цилиндрические координаты точки , если известны ее прямоугольные координаты ;
в) найти прямоугольные координаты точки , если известны ее цилиндрические координаты: .
Решение. а) Координатной поверхностью , т.е. геометрическим местом точек при фиксированном значении полярного радиуса , является прямой круговой цилиндр, ось которого параллельна оси аппликат (рис.2.35). Этим объясняется название цилиндрической системы координат. Координатной поверхностью , т.е. геометрическим местом точек при фиксированном значении полярного угла , является полуплоскость, ограниченная осью аппликат (на рис.2.35 изображены полуплоскости и ). Координатной поверхностью , т.е. геометрическим местом точек при фиксированном значении аппликаты , является плоскость, перпендикулярная оси аппликат (на рис.2.35 изображены плоскости и ).
б) Найдем цилиндрические координаты точки . Аппликата , полярный радиус и полярный угол находим по формулам (2.20) (см. пример 2.11):
так как и ортогональная проекция точки на координатную плоскость (основную плоскость) лежит в IV четверти.
в) Найдем прямоугольные координаты точки . По формулам (2.19) вычисляем (см. пример 2.10):
Скорость и ускорение точки в цилиндрических координатах


Скорость и ускорение точки в цилиндрических координатах
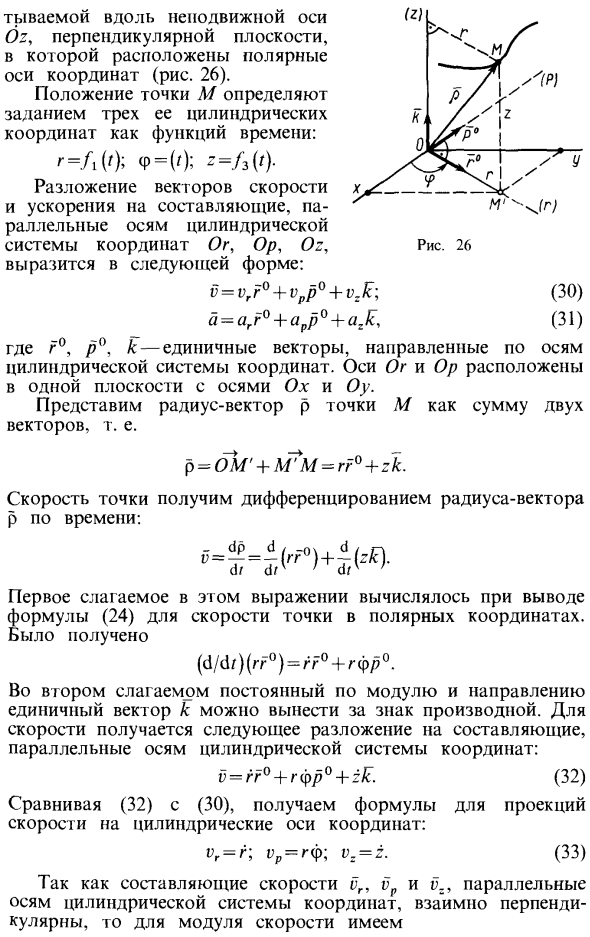
- Цилиндрические оси иногда используются, когда точки перемещаются в пространстве. Они получены путем сложения координат r с полярными координатами на плоскости. Он проходит вдоль неподвижной оси Oz, перпендикулярной плоскости с полярной осью координат (рис. 26). Положение точки М определяется путем установки трех ее цилиндрических координат как функции времени. r = /, (z); f(‘): = A 4.
Вводя понятие времени, мы получаем более сложную науку под названием кинематика, которая связана не с физическими причинами движения, а с геометрической природой движения во взаимосвязи времени. Людмила Фирмаль
Разложение векторов скорости и ускорения на составляющие, параллельные осям цилиндрической системы координат Or, Op, Oz, выражается в виде v = vrr ° + vJ, p0 + vI £; (30) a = arr ° + app ° + ajc, (31) Где r °, p ° и k единичные векторы в направлении вдоль оси цилиндрической системы координат. Оси Ор и Ор находятся в одной плоскости с осями Ох и Оу. Выразите радиус-вектор p точки M как сумму двух векторов. p = OM ‘+ M’ M = rr ° + zk. Скорость точки получается путем дифференцирования вектора радиуса p по времени. Первый член этой формулы был рассчитан при выводе формулы для скорости полярной точки (24). прибывший (D / dz) (rr °) = rr ° +/ r = r; 1> p = rf; t>. = z. (33).
- Компоненты скорости t> r, vp и v. Параллельно оси цилиндрической системы координат и перпендикулярно друг другу, Ускорение точки получается путем дифференцирования вектора скорости по времени. Первый член в этом уравнении был рассчитан, когда ускорение было получено в полярных координатах. ^ (R0 + rfr0) = (r-rf2) r ° + (rf + 2rf) p0 Второе слагаемое в дифференцировании проходит вектор k по знаку производной.
Доказано, что две пары сил в плоскости, пересекающиеся с силой, действующей на один и тот же объект, могут быть заменены одной эквивалентной парой сил векторного момента, равной сумме векторных моментов пары заданных сил. Людмила Фирмаль
Объедините производные результаты, чтобы получить следующее разложение ускорения на компоненты, параллельные осям цилиндрической системы координат. a = (r-rf2) r0 + (rf + 2rf) p ° 4-2. (34) По сравнению с (31) получена проекционная формула ускорения по цилиндрической координатной оси. ar = r gp2; ar = gf + 2gf; az = z. (35) Компоненты ускорения a, ar и ar перпендикулярны друг другу, поэтому a = y / ai + aj + al = h / (r-rf2) 24(rf + 2rf) 2 + r2.
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
http://mathhelpplanet.com/static.php?p=tsilindricheskie-koordinaty
http://lfirmal.com/skorost-i-uskorenie-tochki-v-cilindricheskih-koordinatah/
From Wikipedia, the free encyclopedia

A cylindrical coordinate system with origin O, polar axis A, and longitudinal axis L. The dot is the point with radial distance ρ = 4, angular coordinate φ = 130°, and height z = 4.
A cylindrical coordinate system is a three-dimensional coordinate system that specifies point positions by the distance from a chosen reference axis (axis L in the image opposite), the direction from the axis relative to a chosen reference direction (axis A), and the distance from a chosen reference plane perpendicular to the axis (plane containing the purple section). The latter distance is given as a positive or negative number depending on which side of the reference plane faces the point.
The origin of the system is the point where all three coordinates can be given as zero. This is the intersection between the reference plane and the axis.
The axis is variously called the cylindrical or longitudinal axis, to differentiate it from the polar axis, which is the ray that lies in the reference plane, starting at the origin and pointing in the reference direction.
Other directions perpendicular to the longitudinal axis are called radial lines.
The distance from the axis may be called the radial distance or radius, while the angular coordinate is sometimes referred to as the angular position or as the azimuth. The radius and the azimuth are together called the polar coordinates, as they correspond to a two-dimensional polar coordinate system in the plane through the point, parallel to the reference plane. The third coordinate may be called the height or altitude (if the reference plane is considered horizontal), longitudinal position,[1] or axial position.[2]
Cylindrical coordinates are useful in connection with objects and phenomena that have some rotational symmetry about the longitudinal axis, such as water flow in a straight pipe with round cross-section, heat distribution in a metal cylinder, electromagnetic fields produced by an electric current in a long, straight wire, accretion disks in astronomy, and so on.
They are sometimes called «cylindrical polar coordinates»[3] and «polar cylindrical coordinates»,[4] and are sometimes used to specify the position of stars in a galaxy («galactocentric cylindrical polar coordinates»).[5]
Definition[edit]
The three coordinates (ρ, φ, z) of a point P are defined as:
- The axial distance or radial distance ρ is the Euclidean distance from the z-axis to the point P.
- The azimuth φ is the angle between the reference direction on the chosen plane and the line from the origin to the projection of P on the plane.
- The axial coordinate or height z is the signed distance from the chosen plane to the point P.
Unique cylindrical coordinates[edit]
As in polar coordinates, the same point with cylindrical coordinates (ρ, φ, z) has infinitely many equivalent coordinates, namely (ρ, φ ± n×360°, z) and (−ρ, φ ± (2n + 1)×180°, z), where n is any integer. Moreover, if the radius ρ is zero, the azimuth is arbitrary.
In situations where someone wants a unique set of coordinates for each point, one may restrict the radius to be non-negative (ρ ≥ 0) and the azimuth φ to lie in a specific interval spanning 360°, such as [−180°,+180°] or [0,360°].
Conventions[edit]
The notation for cylindrical coordinates is not uniform. The ISO standard 31-11 recommends (ρ, φ, z), where ρ is the radial coordinate, φ the azimuth, and z the height. However, the radius is also often denoted r or s, the azimuth by θ or t, and the third coordinate by h or (if the cylindrical axis is considered horizontal) x, or any context-specific letter.
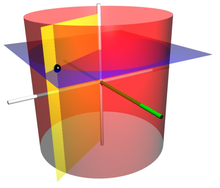
The coordinate surfaces of the cylindrical coordinates (ρ, φ, z). The red cylinder shows the points with ρ = 2, the blue plane shows the points with z = 1, and the yellow half-plane shows the points with φ = −60°. The z-axis is vertical and the x-axis is highlighted in green. The three surfaces intersect at the point P with those coordinates (shown as a black sphere); the Cartesian coordinates of P are roughly (1.0, −1.732, 1.0).

Cylindrical coordinate surfaces. The three orthogonal components, ρ (green), φ (red), and z (blue), each increasing at a constant rate. The point is at the intersection between the three colored surfaces.
In concrete situations, and in many mathematical illustrations, a positive angular coordinate is measured counterclockwise as seen from any point with positive height.
Coordinate system conversions[edit]
The cylindrical coordinate system is one of many three-dimensional coordinate systems. The following formulae may be used to convert between them.
Cartesian coordinates[edit]
For the conversion between cylindrical and Cartesian coordinates, it is convenient to assume that the reference plane of the former is the Cartesian xy-plane (with equation z = 0), and the cylindrical axis is the Cartesian z-axis. Then the z-coordinate is the same in both systems, and the correspondence between cylindrical (ρ, φ, z) and Cartesian (x, y, z) are the same as for polar coordinates, namely

in one direction, and

in the other. The arcsine function is the inverse of the sine function, and is assumed to return an angle in the range [−π/2, +π/2] = [−90°, +90°]. These formulas yield an azimuth φ in the range [−90°, +270°].
By using the arctangent function that returns also an angle in the range [−π/2, +π/2] = [−90°, +90°], one may also compute  without computing
without computing  first
first

For other formulas, see the article Polar coordinate system.
Many modern programming languages provide a function that will compute the correct azimuth φ, in the range (−π, π), given x and y, without the need to perform a case analysis as above. For example, this function is called by atan2(y, x) in the C programming language, and (atan y x) in Common Lisp.
Spherical coordinates[edit]
Spherical coordinates (radius r, elevation or inclination θ, azimuth φ), may be converted into cylindrical coordinates by:
Cylindrical coordinates may be converted into spherical coordinates by:
Line and volume elements[edit]
- See multiple integral for details of volume integration in cylindrical coordinates, and Del in cylindrical and spherical coordinates for vector calculus formulae.
In many problems involving cylindrical polar coordinates, it is useful to know the line and volume elements; these are used in integration to solve problems involving paths and volumes.
The line element is

The volume element is

The surface element in a surface of constant radius ρ (a vertical cylinder) is

The surface element in a surface of constant azimuth φ (a vertical half-plane) is

The surface element in a surface of constant height z (a horizontal plane) is

The del operator in this system leads to the following expressions for gradient, divergence, curl and Laplacian:
![{displaystyle {begin{aligned}nabla f&={frac {partial f}{partial rho }}{boldsymbol {hat {rho }}}+{frac {1}{rho }}{frac {partial f}{partial varphi }}{boldsymbol {hat {varphi }}}+{frac {partial f}{partial z}}{boldsymbol {hat {z}}}\[8px]nabla cdot {boldsymbol {A}}&={frac {1}{rho }}{frac {partial }{partial rho }}left(rho A_{rho }right)+{frac {1}{rho }}{frac {partial A_{varphi }}{partial varphi }}+{frac {partial A_{z}}{partial z}}\[8px]nabla times {boldsymbol {A}}&=left({frac {1}{rho }}{frac {partial A_{z}}{partial varphi }}-{frac {partial A_{varphi }}{partial z}}right){boldsymbol {hat {rho }}}+left({frac {partial A_{rho }}{partial z}}-{frac {partial A_{z}}{partial rho }}right){boldsymbol {hat {varphi }}}+{frac {1}{rho }}left({frac {partial }{partial rho }}left(rho A_{varphi }right)-{frac {partial A_{rho }}{partial varphi }}right){boldsymbol {hat {z}}}\[8px]nabla ^{2}f&={frac {1}{rho }}{frac {partial }{partial rho }}left(rho {frac {partial f}{partial rho }}right)+{frac {1}{rho ^{2}}}{frac {partial ^{2}f}{partial varphi ^{2}}}+{frac {partial ^{2}f}{partial z^{2}}}end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f83defb6183acc79213d062ed3734d4c6f691bbf)
Cylindrical harmonics[edit]
The solutions to the Laplace equation in a system with cylindrical symmetry are called cylindrical harmonics.
Kinematics[edit]
In a cylindrical coordinate system, the position of a particle can be written as[6]

The velocity of the particle is the time derivative of its position,

where the term  comes from the Poisson formula
comes from the Poisson formula  . Its acceleration is[6]
. Its acceleration is[6]

See also[edit]
- List of canonical coordinate transformations
- Vector fields in cylindrical and spherical coordinates
- Del in cylindrical and spherical coordinates
References[edit]
- ^ Krafft, C.; Volokitin, A. S. (1 January 2002). «Resonant electron beam interaction with several lower hybrid waves». Physics of Plasmas. 9 (6): 2786–2797. Bibcode:2002PhPl….9.2786K. doi:10.1063/1.1465420. ISSN 1089-7674. Archived from the original on 14 April 2013. Retrieved 9 February 2013.
…in cylindrical coordinates (r,θ,z) … and Z = vbzt is the longitudinal position…
- ^ Groisman, Alexander; Steinberg, Victor (1997). «Solitary Vortex Pairs in Viscoelastic Couette Flow». Physical Review Letters. 78 (8): 1460–1463. arXiv:patt-sol/9610008. Bibcode:1997PhRvL..78.1460G. doi:10.1103/PhysRevLett.78.1460. S2CID 54814721.
…where r, θ, and z are cylindrical coordinates … as a function of axial position…
- ^ Szymanski, J. E. (1989). Basic Mathematics for Electronic Engineers: models and applications. Tutorial Guides in Electronic Engineering (no. 16). Taylor & Francis. p. 170. ISBN 978-0-278-00068-1.
- ^ Nunn, Robert H. (1989). Intermediate Fluid Mechanics. Taylor & Francis. p. 3. ISBN 978-0-89116-647-4.
- ^ Sparke, Linda Siobhan; Gallagher, John Sill (2007). Galaxies in the Universe: An Introduction (2nd ed.). Cambridge University Press. p. 37. ISBN 978-0-521-85593-8.
- ^ a b Taylor, John R. (2005). Classical Mechanics. Sausalito, California: University Science Books. p. 29.
Further reading[edit]
- Morse, Philip M.; Feshbach, Herman (1953). Methods of Theoretical Physics, Part I. New York City: McGraw-Hill. pp. 656–657. ISBN 0-07-043316-X. LCCN 52011515.
- Margenau, Henry; Murphy, George M. (1956). The Mathematics of Physics and Chemistry. New York City: D. van Nostrand. p. 178. ISBN 9780882754239. LCCN 55010911. OCLC 3017486.
- Korn, Granino A.; Korn, Theresa M. (1961). Mathematical Handbook for Scientists and Engineers. New York City: McGraw-Hill. pp. 174–175. LCCN 59014456. ASIN B0000CKZX7.
- Sauer, Robert; Szabó, István (1967). Mathematische Hilfsmittel des Ingenieurs. New York City: Springer-Verlag. p. 95. LCCN 67025285.
- Zwillinger, Daniel (1992). Handbook of Integration. Boston: Jones and Bartlett Publishers. p. 113. ISBN 0-86720-293-9. OCLC 25710023.
- Moon, P.; Spencer, D. E. (1988). «Circular-Cylinder Coordinates (r, ψ, z)». Field Theory Handbook, Including Coordinate Systems, Differential Equations, and Their Solutions (corrected 2nd ed.). New York City: Springer-Verlag. pp. 12–17, Table 1.02. ISBN 978-0-387-18430-2.
External links[edit]
- «Cylinder coordinates», Encyclopedia of Mathematics, EMS Press, 2001 [1994]
- MathWorld description of cylindrical coordinates
- Cylindrical Coordinates Animations illustrating cylindrical coordinates by Frank Wattenberg