Как найти координаты вектора в базисе
Решение:
Записываем матрицу перехода А:
и находим ее определитель
<>0
Видим, что ранг матрицы С равен трем. Из теоремы о базисном миноре векторы f1 , f2 , f3 линейно независимы, а поэтому могут быть приняты в качестве базиса пространства R 3 .
Находим обратную матрицу А -1 .
Транспонированная матрица:
Обратная матрица А -1
Находим координаты вектора х относительно нового базиса.
Пример №1 . Даны векторы a<1;2;1>, b<2;-2;1>, c <1;-2;0>и d <0;3;1>. Установить, что векторы a , b , c образуют базис, и найти координаты вектора d в этом базисе.
Решение:
Соотношение, записанное для векторов d = αa + βb + γc, справедливо для каждой из проекций:
α*1 + β*2 + γ*1 = 0
α*2 — β*2 — γ*2 = 3
α*1 + β*1 + γ0 = 1 т.е. получена алгебраическая система трёх уравнений с тремя неизвестными. Решение системы удобнее вычислять методом Крамера или методом обратной матрицы:
α = 1/2; β = 1/2; γ = -3/2
следовательно, и вектор d имеет разложение в базисе a, b, c :
d = 1/2a + 1/2b — 3/2c
Пример №2 . Даны векторы  . Показать, что векторы образуют базис трехмерного пространства и найти координаты вектора в этом базисе:
. Показать, что векторы образуют базис трехмерного пространства и найти координаты вектора в этом базисе:
Пример №3 . Даны два линейных преобразования:
х’1 = a11x1 + a12x2 + a13x3, х»1 = b11x’1 + b12x’2 + b13x’3,
х’2 = a21x1 + a22x2 + a23x3, х»2 = b21x’1 + b22x’2 + b23x’3,
х’3 = a31x1 + a32x2 + a33x3, х»3 = b31x’1 + b32x’2 + b33x’3,
Средствами матричного исчисления найти преобразование, выражающее х»1, x»2, x»3 через х1, х2, х3.
х’1 = 4x1 + 3x2 + 5x3, х»1 = — x’1 + 3x’2 — 2x’3,
х’2 = 6x1 + 7x2 + x3, х»2 = — 4x’1 + x’2 + 2x’3,
х’3 = 9x1 + x2 + 8x3, х»3 = 3x’1 — 4x’2 + 5x’3,
Решение. Используя калькулятор, получаем:
Обозначим:
Тогда матричное уравнение запишется в виде: A·X = B.
Вычислим определитель матрицы А:
∆ = 4*(7*8 — 1*1) — 6*(3*8 — 1*5) + 9*(3*1 — 7*5) = -182
Определитель матрицы А равен detA=-182
Так как A невырожденная матрица, то существует обратная матрица A -1 . Умножим слева обе части уравнения на A -1 : A -1 ·A·X = A -1 ·B, тогда получим E·X = A -1 ·B, или X = A -1 ·B.
Найдем обратную матрицу A -1 .
| A -1 = -1/182 |
|
Матрицу Х ищем по формуле:
| X = A -1 ·B = -1/182 |
|
* | = |
|
Пример №4 . В декартовой прямой системе координат даны вершины пирамиды A(3,0,-1), B(-1,-2,-4), C(-1,2,4), D(7,-3,1). Найдите:
а) длину ребра AB;
б) косинус угла между векторами AB и AC ;
в) уравнение ребра AB;
г) уравнение грани ABC;
д) уравнение высоты, опущенной из вершины D на грань ABC;
е) координаты векторов e 1= AB , e 2= AC , e 3= AD и докажите, что они образуют линейную независимую систему;
ж) координаты вектора MN , где M и N – середины ребер AD и DC соответственно;
з) разложение вектора MN по базису ( e 1, e 2, e 3)
Решение. Пункты (а-д) решаются через онлайн калькулятор.
Задание 1 . Разложить вектор d =(8;-5) по векторам a =(1;-2) и b =(2;3).
Решение. Векторы a и b образуют базис на плоскости, так как они не коллинеарны (, то есть соответствующие координаты этих векторов не пропорциональны).
Следовательно, вектор d = α a +β b , где α и β – коэффициенты, которые надо найти.
Таким образом, имеем равенство
8i-5j=α(i-2j)+β(2i+3j)=(α+2β)i+ (-2α+3β)j.
В координатной форме это равенство примет вид
Решим полученную систему уравнений.
Алгоритм нахождения базиса системы векторов
Для того чтобы найти базис системы векторов Av А2. А , необходимо:
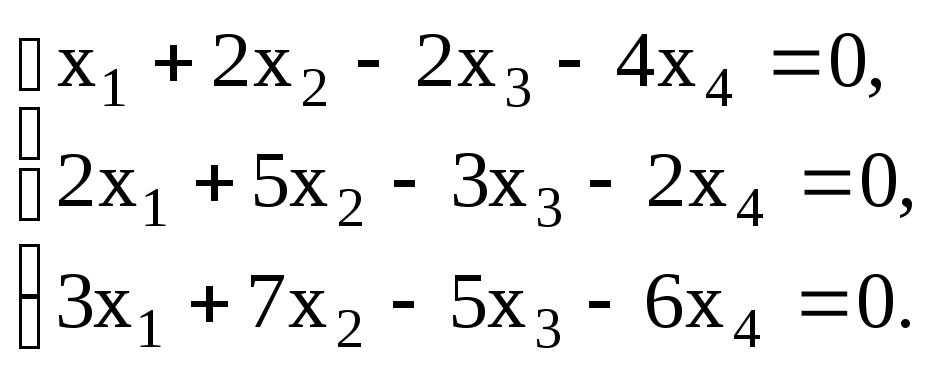
1) составить соответствующую системе векторов однородную систему уравнений
2) привести эту систему к равносильной разрешенной системе вида
- 3) записать базис системы векторов Б = (АрА2, . А ), включив в него векторы, соответствующие разрешенным неизвестным;
- 4) записать разложения векторов по базису; коэффициентами разложения вектора А. по этому базису являются координаты соответствующего вектора
в разрешенной системе уравнений, т.е.
Система векторов, состоящая из п векторов, ранг которой равен г, может иметь несколько базисов. Число возможных базисов системы векторов определяется как число меньшее или равное числу сочетаний из п по г.
Пример 3.3. Найти ранг и базис системы векторов
разложения векторов по базису, перейти к новому базису и найти число возможных базисов системы.
Решение. Составим систему уравнений A t ay + А2х2 + . + А„хп = 0, которая в координатной записи имеет вид
Приведение данной системы уравнений с помощью преобразований Жордана к равносильной разрешенной приведено в ниже следующей таблице.
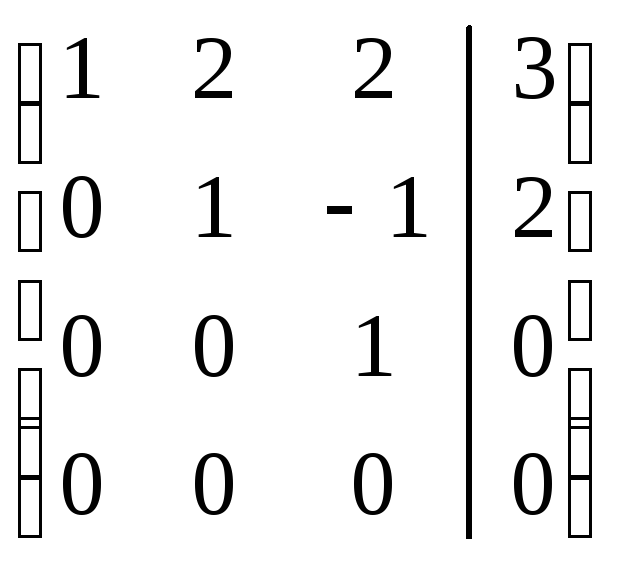
Разрешенная система имеет вид
В базис системы векторов включаем 1-й и 2-й векторы Б: = (AVA2), которые соответствуют разрешенным неизвестным х1 и х2. Ранг системы векторов равен числу векторов, вошедших в базис, т.е. г = 2.
Запишем разложения векторов по базису. Коэффициентами разложения вектора А3 являются координаты вектора А’3 = (3, -2), т.е. коэффициенты при х3 в разрешенной системе уравнений (в последних трех строках таблицы), они образуют столбец, расположенный под х3 А3 = ЗЛ1 — 2Аг Аналогично, коэффициентами разложения вектора А4 являются координаты вектора А’4 = (4, 1) А4 = 4Ау + 1 Ат
Для нахождения нового базиса необходимо выбрать новый разрешающий элемент. Пусть этим элементом будет элемент я94 = 1.
Векторное пространство: размерность и базис, разложение вектора по базису
В статье о n -мерных векторах мы пришли к понятию линейного пространства, порождаемого множеством n -мерных векторов. Теперь нам предстоит рассмотреть не менее важные понятия, такие как размерность и базис векторного пространства. Они напрямую связаны с понятием линейно независимой системы векторов, так что дополнительно рекомендуется напомнить себе основы и этой темы.
Введем некоторые определения.
Размерность векторного пространства – число, соответствующее максимальному количеству линейно независимых векторов в этом пространстве.
Базис векторного пространства – совокупность линейно независимых векторов, упорядоченная и в своей численности равная размерности пространства.
Рассмотрим некое пространство n -векторов. Размерность его соответственно равна n . Возьмем систему из n -единичных векторов:
e ( 1 ) = ( 1 , 0 , . . . , 0 ) e ( 2 ) = ( 0 , 1 , . . . , 0 ) e ( n ) = ( 0 , 0 , . . . , 1 )
Используем эти векторы в качестве составляющих матрицы A : она будет являться единичной с размерностью n на n . Ранг этой матрицы равен n . Следовательно, векторная система e ( 1 ) , e ( 2 ) , . . . , e ( n ) является линейно независимой. При этом к системе невозможно добавить ни одного вектора, не нарушив ее линейной независимости.
Так как число векторов в системе равно n , то размерность пространства n -мерных векторов равна n , а единичные векторы e ( 1 ) , e ( 2 ) , . . . , e ( n ) являются базисом указанного пространства.
Из полученного определения сделаем вывод: любая система n -мерных векторов, в которой число векторов меньше n , не является базисом пространства.
Если мы поменяем местами первый и второй вектор, получим систему векторов e ( 2 ) , e ( 1 ) , . . . , e ( n ) . Она также будет являться базисом n -мерного векторного пространства. Составим матрицу, взяв за ее строки векторы полученной системы. Матрица может быть получена из единичной матрицы перестановкой местами первых двух строк, ранг ее будет равен n . Система e ( 2 ) , e ( 1 ) , . . . , e ( n ) линейно независима и является базисом n -мерного векторного пространства.
Переставив местами в исходной системе другие векторы, получим еще один базис.
Мы можем взять линейно независимую систему неединичных векторов, и она также будет представлять собой базис n -мерного векторного пространства.
Векторное пространство с размерностью n имеет столько базисов, сколько существует линейно независимых систем из n -мерных векторов числом n.
Плоскость является двумерным пространством – ее базисом будут два любых неколлинеарных вектора. Базисом трехмерного пространства послужат три любых некомпланарных вектора.
Рассмотрим применение данной теории на конкретных примерах.
Исходные данные: векторы
a = ( 3 , — 2 , 1 ) b = ( 2 , 1 , 2 ) c = ( 3 , — 1 , — 2 )
Необходимо определить, являются ли указанные векторы базисом трехмерного векторного пространства.
Решение
Для решения поставленной задачи исследуем заданную систему векторов на линейную зависимость. Составим матрицу, где строки – координаты векторов. Определим ранг матрицы.
A = 3 2 3 — 2 1 — 1 1 2 — 2 A = 3 — 2 1 2 1 2 3 — 1 — 2 = 3 · 1 · ( — 2 ) + ( — 2 ) · 2 · 3 + 1 · 2 · ( — 1 ) — 1 · 1 · 3 — ( — 2 ) · 2 · ( — 2 ) — 3 · 2 · ( — 1 ) = = — 25 ≠ 0 ⇒ R a n k ( A ) = 3
Следовательно, заданные условием задачи векторы линейно независимы, и их численность равна размерности векторного пространства – они являются базисом векторного пространства.
Ответ: указанные векторы являются базисом векторного пространства.
Исходные данные: векторы
a = ( 3 , — 2 , 1 ) b = ( 2 , 1 , 2 ) c = ( 3 , — 1 , — 2 ) d = ( 0 , 1 , 2 )
Необходимо определить, может ли указанная система векторов являться базисом трехмерного пространства.
Решение
Указанная в условии задачи система векторов является линейно зависимой, т.к. максимальное число линейно независимых векторов равно 3. Таким образом, указанная система векторов не может служить базисом трехмерного векторного пространства. Но стоит отметить, что подсистема исходной системы a = ( 3 , — 2 , 1 ) , b = ( 2 , 1 , 2 ) , c = ( 3 , — 1 , — 2 ) является базисом.
Ответ: указанная система векторов не является базисом.
Исходные данные: векторы
a = ( 1 , 2 , 3 , 3 ) b = ( 2 , 5 , 6 , 8 ) c = ( 1 , 3 , 2 , 4 ) d = ( 2 , 5 , 4 , 7 )
Могут ли они являться базисом четырехмерного пространства?
Решение
Cоставим матрицу, используя в качестве строк координаты заданных векторов
A = 1 2 3 3 2 5 6 8 1 3 2 4 2 5 4 7
По методу Гаусса определим ранг матрицы:
A = 1 2 3 3 2 5 6 8 1 3 2 4 2 5 4 7
1 2 3 3 0 1 0 2 0 1 — 1 1 0 1 — 2 1
1 2 3 3 0 1 0 2 0 0 — 1 — 1 0 0 — 2 — 1
1 2 3 3 0 1 0 2 0 0 — 1 — 1 0 0 0 1 ⇒ ⇒ R a n k ( A ) = 4
Следовательно, система заданных векторов линейно независима и их численность равна размерности векторного пространства – они являются базисом четырехмерного векторного пространства.
Ответ: заданные векторы являются базисом четырехмерного пространства.
Исходные данные: векторы
a ( 1 ) = ( 1 , 2 , — 1 , — 2 ) a ( 2 ) = ( 0 , 2 , 1 , — 3 ) a ( 3 ) = ( 1 , 0 , 0 , 5 )
Составляют ли они базис пространства размерностью 4?
Решение
Исходная система векторов линейно независима, но численность векторов в ней недостаточна, чтобы стать базисом четырехмерного пространства.
Ответ: нет, не составляют.
Разложение вектора по базису
Примем, что произвольные векторы e ( 1 ) , e ( 2 ) , . . . , e ( n ) являются базисом векторного n-мерного пространства. Добавим к ним некий n -мерный вектор x → : полученная система векторов станет линейно зависимой. Свойства линейной зависимости гласят, что хотя бы один из векторов такой системы может линейно выражаться через остальные. Переформулируя это утверждение, можно говорить о том, что хотя бы один из векторов линейно зависимой системы может раскладываться по остальным векторам.
Таким образом, мы пришли к формулировке важнейшей теоремы:
Любой вектор n -мерного векторного пространства единственным образом раскладывается по базису.
Докажем эту теорему:
зададим базис n -мерного векторного пространства — e ( 1 ) , e ( 2 ) , . . . , e ( n ) . Сделаем систему линейно зависимой, добавив к ней n -мерный вектор x → . Этот вектор может быть линейно выражен через исходные векторы e :
x = x 1 · e ( 1 ) + x 2 · e ( 2 ) + . . . + x n · e ( n ) , где x 1 , x 2 , . . . , x n — некоторые числа.
Теперь докажем, что такое разложение является единственным. Предположим, что это не так и существует еще одно подобное разложение:
Отнимем от левой и правой частей этого равенства соответственно левую и правую части равенства x = x 1 · e ( 1 ) + x 2 · e ( 2 ) + . . . + x n · e ( n ) . Получим:
1 — x 1 ) · e ( 1 ) + ( x
2 — x 2 ) · e ( 2 ) + . . . ( x
Система базисных векторов e ( 1 ) , e ( 2 ) , . . . , e ( n ) линейно независима; по определению линейной независимости системы векторов равенство выше возможно только тогда, когда все коэффициенты ( x
2 — x 2 ) , . . . , ( x
n — x n ) будут равны нулю. Из чего справедливым будет: x 1 = x
n . И это доказывает единственный вариант разложения вектора по базису.
При этом коэффициенты x 1 , x 2 , . . . , x n называются координатами вектора x → в базисе e ( 1 ) , e ( 2 ) , . . . , e ( n ) .
Доказанная теория делает понятным выражение «задан n -мерный вектор x = ( x 1 , x 2 , . . . , x n ) »: рассматривается вектор x → n -мерного векторного пространства, и его координаты заданы в некотором базисе. При этом также понятно, что этот же вектор в другом базисе n -мерного пространства будет иметь другие координаты.
Рассмотрим следующий пример: допустим, что в некотором базисе n -мерного векторного пространства задана система из n линейно независимых векторов
e ( 1 ) = ( e 1 ( 1 ) , e 2 ( 1 ) , . . . , e n ( 1 ) ) e ( 2 ) = ( e 1 ( 2 ) , e 2 ( 2 ) , . . . , e n ( 2 ) ) ⋮ e ( n ) = ( e 1 ( n ) , e 2 ( n ) , . . . , e n ( n ) )
а также задан вектор x = ( x 1 , x 2 , . . . , x n ) .
Векторы e 1 ( 1 ) , e 2 ( 2 ) , . . . , e n ( n ) в этом случае также являются базисом этого векторного пространства.
Предположим, что необходимо определить координаты вектора x → в базисе e 1 ( 1 ) , e 2 ( 2 ) , . . . , e n ( n ) , обозначаемые как x
Вектор x → будет представлен следующим образом:
2 · e ( 2 ) + . . . + x
Запишем это выражение в координатной форме:
( x 1 , x 2 , . . . , x n ) = x
1 · ( e ( 1 ) 1 , e ( 1 ) 2 , . . . , e ( 1 ) n ) + x
2 · ( e ( 2 ) 1 , e ( 2 ) 2 , . . . , e ( 2 ) n ) + . . . + + x
n · ( e ( n ) 1 , e ( n ) 2 , . . . , e ( n ) n ) = = ( x
2 e 1 ( 2 ) + . . . + x
2 e 2 ( 2 ) + + . . . + x
n e 2 ( n ) , . . . , x
2 e n ( 2 ) + . . . + x
Полученное равенство равносильно системе из n линейных алгебраических выражений с n неизвестными линейными переменными x
n e 2 n ⋮ x n = x
Матрица этой системы будет иметь следующий вид:
e 1 ( 1 ) e 1 ( 2 ) ⋯ e 1 ( n ) e 2 ( 1 ) e 2 ( 2 ) ⋯ e 2 ( n ) ⋮ ⋮ ⋮ ⋮ e n ( 1 ) e n ( 2 ) ⋯ e n ( n )
Пусть это будет матрица A , и ее столбцы – векторы линейно независимой системы векторов e 1 ( 1 ) , e 2 ( 2 ) , . . . , e n ( n ) . Ранг матрицы – n , и ее определитель отличен от нуля. Это свидетельствует о том, что система уравнений имеет единственное решение, определяемое любым удобным способом: к примеру, методом Крамера или матричным методом. Таким образом мы сможем определить координаты x
n вектора x → в базисе e 1 ( 1 ) , e 2 ( 2 ) , . . . , e n ( n ) .
Применим рассмотренную теорию на конкретном примере.
Исходные данные: в базисе трехмерного пространства заданы векторы
e ( 1 ) = ( 1 , — 1 , 1 ) e ( 2 ) = ( 3 , 2 , — 5 ) e ( 3 ) = ( 2 , 1 , — 3 ) x = ( 6 , 2 , — 7 )
Необходимо подтвердить факт, что система векторов e ( 1 ) , e ( 2 ) , e ( 3 ) также служит базисом заданного пространства, а также определить координаты вектора х в заданном базисе.
Решение
Система векторов e ( 1 ) , e ( 2 ) , e ( 3 ) будет являться базисом трехмерного пространства, если она линейно независима. Выясним эту возможность, определив ранг матрицы A , строки которой – заданные векторы e ( 1 ) , e ( 2 ) , e ( 3 ) .
Используем метод Гаусса:
A = 1 — 1 1 3 2 — 5 2 1 — 3
1 — 1 1 0 5 — 8 0 3 — 5
1 — 1 1 0 5 — 8 0 0 — 1 5
R a n k ( A ) = 3 . Таким образом, система векторов e ( 1 ) , e ( 2 ) , e ( 3 ) линейно независима и является базисом.
Пусть в базисе вектор x → имеет координаты x
3 . Связь этих координат определяется уравнением:
3 e 1 ( 3 ) x 2 = x
3 e 2 ( 3 ) x 3 = x
Применим значения согласно условиям задачи:
Решим систему уравнений методом Крамера:
∆ = 1 3 2 — 1 2 1 1 — 5 — 3 = — 1 ∆ x
1 = 6 3 2 2 2 1 — 7 — 5 — 3 = — 1 , x
1 ∆ = — 1 — 1 = 1 ∆ x
2 = 1 6 2 — 1 2 1 1 — 7 — 3 = — 1 , x
2 ∆ = — 1 — 1 = 1 ∆ x
3 = 1 3 6 — 1 2 2 1 — 5 — 7 = — 1 , x
Так, вектор x → в базисе e ( 1 ) , e ( 2 ) , e ( 3 ) имеет координаты x
Ответ: x = ( 1 , 1 , 1 )
Связь между базисами
Предположим, что в некотором базисе n-мерного векторного пространства даны две линейно независимые системы векторов:
c ( 1 ) = ( c 1 ( 1 ) , c 2 ( 1 ) , . . . , c n ( 1 ) ) c ( 2 ) = ( c 1 ( 2 ) , c 2 ( 2 ) , . . . , c n ( 2 ) ) ⋮ c ( n ) = ( c 1 ( n ) , e 2 ( n ) , . . . , c n ( n ) )
e ( 1 ) = ( e 1 ( 1 ) , e 2 ( 1 ) , . . . , e n ( 1 ) ) e ( 2 ) = ( e 1 ( 2 ) , e 2 ( 2 ) , . . . , e n ( 2 ) ) ⋮ e ( n ) = ( e 1 ( n ) , e 2 ( n ) , . . . , e n ( n ) )
Указанные системы являются также базисами заданного пространства.
n ( 1 ) — координаты вектора c ( 1 ) в базисе e ( 1 ) , e ( 2 ) , . . . , e ( 3 ) , тогда связь координат будет задаваться системой линейных уравнений:
1 ( 1 ) e 1 ( 1 ) + c
2 ( 1 ) e 1 ( 2 ) + . . . + c
n ( 1 ) e 1 ( n ) с 2 ( 1 ) = c
1 ( 1 ) e 2 ( 1 ) + c
2 ( 1 ) e 2 ( 2 ) + . . . + c
n ( 1 ) e 2 ( n ) ⋮ с n ( 1 ) = c
1 ( 1 ) e n ( 1 ) + c
2 ( 1 ) e n ( 2 ) + . . . + c
В виде матрицы систему можно отобразить так:
( c 1 ( 1 ) , c 2 ( 1 ) , . . . , c n ( 1 ) ) = ( c
n ( 1 ) ) · e 1 ( 1 ) e 2 ( 1 ) … e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) … e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) … e n ( n )
Сделаем по аналогии такую же запись для вектора c ( 2 ) :
( c 1 ( 2 ) , c 2 ( 2 ) , . . . , c n ( 2 ) ) = ( c
n ( 2 ) ) · e 1 ( 1 ) e 2 ( 1 ) … e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) … e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) … e n ( n )
И, далее действуя по тому же принципу, получаем:
( c 1 ( n ) , c 2 ( n ) , . . . , c n ( n ) ) = ( c
n ( n ) ) · e 1 ( 1 ) e 2 ( 1 ) … e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) … e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) … e n ( n )
Матричные равенства объединим в одно выражение:
c 1 ( 1 ) c 2 ( 1 ) ⋯ c n ( 1 ) c 1 ( 2 ) c 2 ( 2 ) ⋯ c n ( 2 ) ⋮ ⋮ ⋮ ⋮ c 1 ( n ) c 2 ( n ) ⋯ c n ( n ) = c
n ( n ) · e 1 ( 1 ) e 2 ( 1 ) ⋯ e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) ⋯ e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) ⋯ e n ( n )
Оно и будет определять связь векторов двух различных базисов.
Используя тот же принцип, возможно выразить все векторы базиса e ( 1 ) , e ( 2 ) , . . . , e ( 3 ) через базис c ( 1 ) , c ( 2 ) , . . . , c ( n ) :
e 1 ( 1 ) e 2 ( 1 ) ⋯ e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) ⋯ e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) ⋯ e n ( n ) = e
n ( n ) · c 1 ( 1 ) c 2 ( 1 ) ⋯ c n ( 1 ) c 1 ( 2 ) c 2 ( 2 ) ⋯ c n ( 2 ) ⋮ ⋮ ⋮ ⋮ c 1 ( n ) c 2 ( n ) ⋯ c n ( n )
Дадим следующие определения:
n ( n ) является матрицей перехода от базиса e ( 1 ) , e ( 2 ) , . . . , e ( 3 )
к базису c ( 1 ) , c ( 2 ) , . . . , c ( n ) .
n ( n ) является матрицей перехода от базиса c ( 1 ) , c ( 2 ) , . . . , c ( n )
к базису e ( 1 ) , e ( 2 ) , . . . , e ( 3 ) .
http://bstudy.net/719717/estestvoznanie/algoritm_nahozhdeniya_bazisa_sistemy_vektorov
http://zaochnik.com/spravochnik/matematika/vektory/vektornoe-prostranstvo/
Линейной
комбинацией векторов
![]() называется вектор
называется вектор![]() ,
,
где λ1, … , λm– произвольные коэффициенты.
Система
векторов
![]() называется
называется
линейно зависимой, если существует ее
линейная комбинация, равная![]() ,
,
в которой есть хотя бы один ненулевой
коэффициент.
Система
векторов
![]() называется
называется
линейно независимой, если в любой ее
линейной комбинации, равной![]() ,
,
все коэффициенты нулевые.
Базисом
системы векторов
![]() называется
называется
ее непустая линейно независимая
подсистема, через которую можно выразить
любой вектор системы.
П р
и м е р 2. Найти базис системы векторов![]() =
=
(1, 2, 2, 4),![]() =
=
(2, 3, 5, 1),![]() =
=
(3, 4, 8, -2),![]() =
=
(2, 5, 0, 3) и выразить остальные векторы
через базис.
Р е
ш е н и е. Строим матрицу, в которой
координаты данных векторов располагаем
по столбцам. Приводим ее к ступенчатому
виду.
 ~
~ ~
~ ~
~ .
.
Базис
данной системы образуют векторы
![]() ,
,![]() ,
,![]() ,
,
которым соответствуют ведущие элементы
строк, выделенные кружками. Для выражения
вектора![]() решаем уравнениеx1
решаем уравнениеx1![]() +x2
+x2![]() +
+
x4![]() =
=![]() .
.
Оно сводится к системе линейных
уравнений, матрица которой получается
из исходной перестановкой столбца,
соответствующего![]() ,
,
на место столбца свободных членов.
Поэтому для решения системы используем
полученную матрицу в ступенчатом виде,
сделав в ней необходимые перестановки.
Последовательно
находим:
x4
= 0;
x2
= 2;
x1
+ 4 = 3, x1
= -1;
![]() =
=
—![]() +2
+2![]() .
.
Замечание
1. Если требуется выразить через базис
несколько векторов, то для каждого из
них строится соответствующая система
линейных уравнений. Эти системы будут
отличаться только столбцами свободных
членов. Поэтому для их решения можно
составить одну матрицу, в которой будет
несколько столбцов свободных членов.
При этом каждая система решается
независимо от остальных.
Замечание
2. Для выражения любого вектора достаточно
использовать только базисные векторы
системы, стоящие перед ним. При этом
нет необходимости переформировывать
матрицу, достаточно поставить вертикальную
черту в нужном месте.
У п
р а ж н е н и е 2. Найти базис системы
векторов и выразить остальные векторы
через базис:
а)
![]() =
=
(1, 3, 2, 0),![]() =
=
(3, 4, 2, 1),![]() =
=
(1, -2, -2, 1),![]() =
=
(3, 5, 1, 2);
б)
![]() =
=
(2, 1, 2, 3),![]() =
=
(1, 2, 2, 3),![]() =
=
(3, -1, 2, 2),![]() =
=
(4, -2, 2, 2);
в)
![]() =
=
(1, 2, 3),![]() =
=
(2, 4, 3),![]() =
=
(3, 6, 6),![]() =
=
(4, -2, 1);![]() =
=
(2, -6, -2).
-
3. Фундаментальная система решений
Система
линейных уравнений называется однородной,
если все ее свободные члены равны нулю.
Фундаментальной
системой решений однородной системы
линейных уравнений называется базис
множества ее решений.
Пусть
дана неоднородная система линейных
уравнений. Однородной системой,
ассоциированной с данной, называется
система, полученная из данной заменой
всех свободных членов на нули.
Если
неоднородная система совместна и
неопределенна, то ее произвольное
решение имеет вид fн
+ 1fо1+
… + kfоk
,гдеfн– частное
решение неоднородной системы иfо1,
… , fоk–
фундаментальная система решений
ассоциированной однородной системы.
П р
и м е р 3. Найти частное решение
неоднородной системы из примера 1 и
фундаментальную систему решений
ассоциированной однородной системы.
Р е
ш е н и е. Запишем решение, полученное
в примере 1, в векторном виде и разложим
получившийся вектор в сумму по свободным
параметрам, имеющимся в нем, и фиксированным
числовым значениям:
![]() = (x1,
= (x1,
x2,
x3,
x4) =
(–2a + 7b –
2, a, –2b + 1, b) = (–2a,
a, 0, 0) + (7b, 0, –2b, b) + +(–
2, 0, 1, 0) = a(-2, 1, 0, 0) + b(7, 0, -2, 1) + (–
2, 0, 1, 0).
Получаемfн=(–
2, 0, 1, 0), fо1= (-2, 1, 0,
0), fо2= (7, 0, -2, 1).
Замечание.
Аналогично решается задача нахождения
фундаментальной системы решений
однородной системы.
У п
р а ж н е н и е 3.1 Найти фундаментальную
систему решений однородной системы:
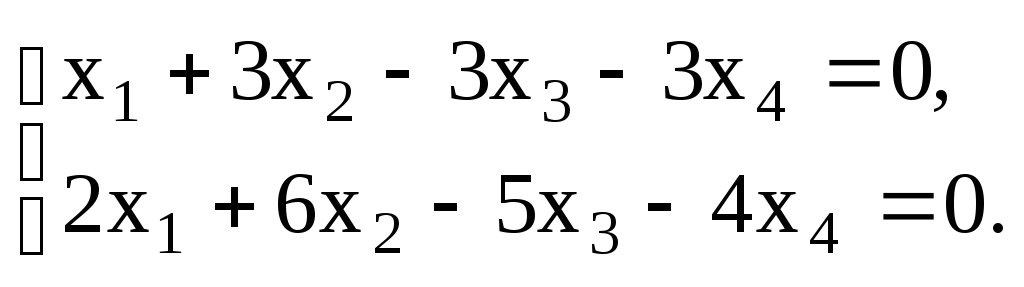
а)
б)
в)
2x1 –
x2
+3x3=
0.
У п
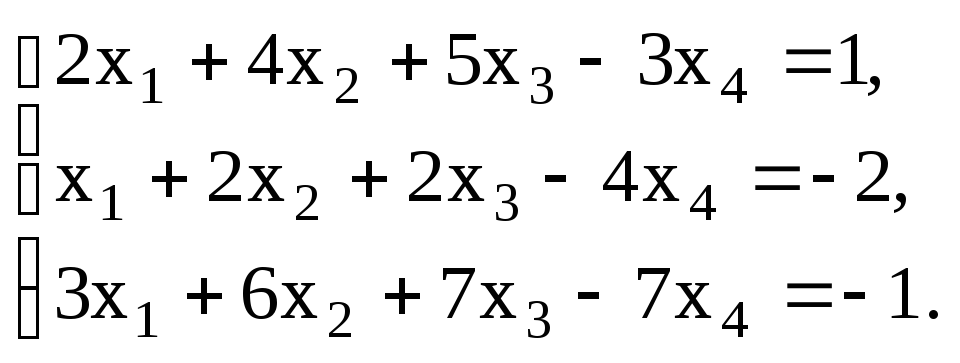
р а ж н е н и е 3.2. Найти частное решение
неоднородной системы и фундаментальную
систему решений ассоциированной
однородной системы:
а)
б)
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
1.8.4. Базис и система координат пространства
Многие закономерности, которые мы рассмотрели на плоскости, будут справедливыми и для пространства. Тем не менее, рекомендую внимательно
прочитать вводную часть, так как появятся новые термины и понятия.
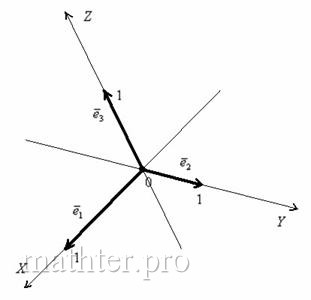
Теперь вместо плоскости компьютерного стола исследуем трёхмерное пространство. Сначала создадим его базис. Кто-то сейчас находится в
помещении, кто-то на улице, но в любом случае нам никуда не деться от трёх измерений: ширины, длины и высоты. Поэтому для построения базиса
потребуется три пространственных вектора. Одного-двух векторов мало, четвёртый – лишний.
И снова разминаемся на пальцах. Пожалуйста, поднимите руку вверх и растопырьте в разные стороны большой, указательный и средний
палец. Это будут векторы ![]() , они смотрят в разные стороны, имеют
, они смотрят в разные стороны, имеют
разную длину и имеют разные углы между собой. Поздравляю, базис трёхмерного пространства готов!
Кстати, не нужно демонстрировать такое
преподавателям, как ни крути пальцами, а от определений никуда не деться =)
Далее зададимся важным вопросом, любые ли три вектора образуют базис трехмерного пространства? Пожалуйста, плотно
прижмите три пальца к столешнице компьютерного стола. Что произошло? Три вектора расположились в одной плоскости, и, грубо говоря, у нас
пропало одно из измерений – высота. Такие векторы являются компланарными, и совершенно понятно, что базиса трёхмерного пространства они не
создают.
Следует отметить, что компланарные векторы не обязаны лежать в одной плоскости, они могут находиться в параллельных плоскостях (только не
делайте этого с пальцами, так отрывался только Сальвадор Дали =)).
Определение: векторы называются компланарными, если существует плоскость, которой они параллельны. Здесь логично добавить, что если
такой плоскости не существует, то и векторы будут не компланарны.
Три компланарных вектора всегда линейно зависимы, то есть линейно выражаются друг через друга. Для простоты снова
представим, что они лежат в одной плоскости. Во-первых, векторы ![]() мало того, что компланарны, могут быть вдобавок ещё и коллинеарны, тогда любой вектор можно
мало того, что компланарны, могут быть вдобавок ещё и коллинеарны, тогда любой вектор можно
выразить через любой вектор. Во втором случае, если, например, векторы ![]() не коллинеарны, то третий вектор выражается через них единственным образом:
не коллинеарны, то третий вектор выражается через них единственным образом: ![]() (почему?).
(почему?).
Справедливо и противоположное утверждение: три некомпланарных вектора всегда линейно независимы, то есть никоим образом
не выражаются друг через друга.
И, очевидно, только такие векторы могут образовать базис трёхмерного пространства.
Определение: базисом трёхмерного пространства называется тройка линейно независимых (некомпланарных) векторов![]() , взятых в определённом порядке, при этом любой вектор пространства единственным
, взятых в определённом порядке, при этом любой вектор пространства единственным
образом раскладывается по данному базису ![]() , где
, где ![]() – координаты вектора
– координаты вектора ![]() в этом базисе. Также говорят, что вектор
в этом базисе. Также говорят, что вектор ![]() представлен в виде линейной комбинации базисных векторов.
представлен в виде линейной комбинации базисных векторов.
Понятие системы координат вводится точно так же, как и для плоского случая, достаточно одной точки (начала отсчёта) и любых трёх линейно
независимых векторов:
Выбранное (где угодно) начало координат ![]() , и некомпланарные векторы
, и некомпланарные векторы ![]() , взятые в
, взятые в
определённом порядке, задают аффинную систему координаттрёхмерного пространства:
Наиболее привычным и удобным частным случаем аффинной системы координаявляется «школьная» система. Начало координат ![]() и ортонормированный
и ортонормированный
базис ![]() задают декартову прямоугольную систему
задают декартову прямоугольную систему
координат пространства:
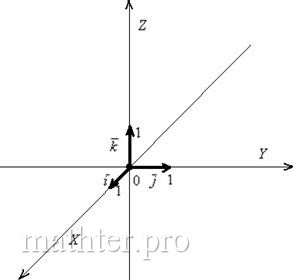
Ось абсцисс ![]() изображают под углом в
изображают под углом в ![]() по отношению к другим осям (к оси ординат
по отношению к другим осям (к оси ординат ![]() и оси аппликат
и оси аппликат ![]() ).
).
Популярный «тетрадный» масштаб: 1 ед. = 2 клетки по осям ![]() и 1 ед. = диагональ одной клетки – по оси
и 1 ед. = диагональ одной клетки – по оси ![]() .
.
И перед тем как перейти к практическим заданиям, вновь систематизируем теоретическую информацию:
Для трёх векторов пространства эквиваленты следующие утверждения:
1) векторы линейно независимы;
2) векторы образуют базис;
3) векторы не компланарны;
4) векторы нельзя линейно выразить друг через друга;
5) определитель, составленный из координат данных векторов, отличен от нуля.
Противоположные высказывания, думаю, понятны.
Линейная зависимость / независимость векторов пространства традиционно проверяется с помощью определителя (пункт 5), и оставшиеся
практические задания параграфа будут носить ярко выраженный алгебраический характер. Повесим на гвоздь геометрическую клюшку и начнём
орудовать бейсбольной битой линейной алгебры:
Три вектора пространства ![]() компланарны тогда и только
компланарны тогда и только
тогда, когда определитель, составленный из
координат данных векторов, равен нулю:  .
.
Обращаю внимание на небольшой технический нюанс: координаты векторов можно записывать не только в столбцы, но и в строки (результат не
изменится). Но гораздо лучше в столбцы, поскольку это выгоднее для решения некоторых практических задач.
Задача 42
Проверить, образуют ли векторы базис трёхмерного пространства:
а) ![]()
б) ![]()
Фактически всё решение сводится к вычислению
определителей:
а) Вычислим определитель, составленный из координат векторов ![]() (определитель раскрыт по первой строке):
(определитель раскрыт по первой строке):

![]() , значит, векторы
, значит, векторы ![]() линейно независимы (не компланарны) и образуют базис трёхмерного пространства.
линейно независимы (не компланарны) и образуют базис трёхмерного пространства.
Ответ: данные векторы образуют базис.
б) Это пункт для самостоятельного решения. Не пропускаем! Для проверки правильности вычислений определителей я приложил к
книге Алгебраический Калькулятор.
Решим творческую задачку:
Задача 43
При каком значении параметра ![]() векторы
векторы ![]() будут компланарны?
будут компланарны?
Решение: Векторы компланарны тогда и только тогда, когда определитель, составленный из координат данных векторов равен
нулю:
По существу, требуется решить уравнение с определителем. Определитель выгоднее всего раскрыть по второй строке:
Проводим дальнейшие упрощения и сводим дело к простейшему линейному уравнению:
![]()
Ответ: при ![]()
Здесь легко выполнить проверку, для этого нужно подставить полученное значение ![]() в исходный определитель и убедиться, что
в исходный определитель и убедиться, что  , раскрыв его заново.
, раскрыв его заново.
И в заключение параграфа рассмотрим ещё одну типовую задачу, которая встречается в подавляющем большинстве контрольных работ по алгебре и
геометрии:
Задача 44
Даны векторы ![]() . Показать, что векторы
. Показать, что векторы ![]() образуют базис трехмерного пространства и найти координаты вектора
образуют базис трехмерного пространства и найти координаты вектора ![]() в этом базисе.
в этом базисе.
Решение: Сначала разбираемся с условием. По условию даны четыре вектора, и, как видите, у них уже есть координаты в некотором базисе.
Какой это базис – нас не интересует. А интересует следующая вещь: три вектора ![]() вполне могут образовывать свой базис. И первый этап полностью совпадает с решением Задачи 42 –
вполне могут образовывать свой базис. И первый этап полностью совпадает с решением Задачи 42 –
необходимо проверить, действительно ли векторы ![]() линейно
линейно
независимы. Для этого нужно вычислить определитель, составленный из координат векторов ![]() :
:
![]() , значит, векторы
, значит, векторы ![]() линейно независимы и образуют базис трехмерного пространства.
линейно независимы и образуют базис трехмерного пространства.
! Важно: координаты векторов ![]() обязательно записываем в столбцы определителя, а не в строки. Иначе будет путаница в дальнейшем алгоритме решения.
обязательно записываем в столбцы определителя, а не в строки. Иначе будет путаница в дальнейшем алгоритме решения.
Теперь вспомним теоретическую часть: если векторы ![]() образуют
образуют
базис, то любой вектор ![]() можно единственным способом разложить по
можно единственным способом разложить по
данному базису: ![]() , где
, где ![]() – координаты вектора в базисе
– координаты вектора в базисе ![]() .
.
Поскольку наши векторы ![]() образуют базис трёхмерного
образуют базис трёхмерного
пространства (это уже доказано), то вектор ![]() можно единственным
можно единственным
образом разложить по данному базису:
![]() , где
, где ![]() – координаты вектора
– координаты вектора ![]() в
в
базисе ![]() .
.
И по условию требуется найти координаты ![]() .
.
Для удобства объяснения поменяю части местами: ![]() . В целях
. В целях
нахождения ![]() следует расписать данное равенство
следует расписать данное равенство
покоординатно:
 – коэффициенты левой части берём из опр-ля
– коэффициенты левой части берём из опр-ля  ,
,
в правую часть записываем координаты вектора ![]() .
.
Получилась система трёх линейных уравнений с тремя неизвестными. Обычно её решают по формулам Крамера, часто даже в условии задачи есть такое
требование.
Главный определитель системы уже найден:
![]() , значит, система имеет единственное решение.
, значит, система имеет единственное решение.
Дальнейшее дело техники:
и ещё один определитель:
Таким образом:
![]() – разложение вектора
– разложение вектора ![]() по базису
по базису ![]() .
.
Ответ: ![]()
Такая же задача для самостоятельного решения:
Задача 45
Даны векторы ![]() . Показать, что в
. Показать, что в![]() екторы образуют базис и найти координаты вектора
екторы образуют базис и найти координаты вектора ![]() в этом базисе. Систему линейных уравнений решить методом Крамера.
в этом базисе. Систему линейных уравнений решить методом Крамера.
Полное решение и примерный образец чистового оформления в конце книги. Для самоконтроля используйте тот же Алгебраический
Калькулятор, где есть макет с автоматическим расчётом системы по правилу Крамера.
 1.9.1. Векторное произведение векторов. Определение и его смысл
1.9.1. Векторное произведение векторов. Определение и его смысл
 1.8.3. Как определить коллинеарность векторов пространства?
1.8.3. Как определить коллинеарность векторов пространства?
| Оглавление |
Автор: Aлeксaндр Eмeлин
Содержание:
- n-мерный вектор и векторное пространство
- Линейные (векторные) n — мерные пространства
- Линейные операции над n — измеримыми векторами
- Скалярное произведение двух векторов
- Линейная зависимость и независимость векторов
- Базис n -мерного пространства. Разложение вектора по базису
- Переход к новому базису. Нахождение базисных решений системы линейных алгебраических уравнений
- Однородная система уравнений. Особенности решения
n-мерный вектор и векторное пространство
Множество всех векторов, которые мы рассматривали на плоскости или в пространстве и для которых определены операции сложения векторов, умножение вектора на число являются простыми примерами векторного пространства.
Определение 1. Упорядоченное множество n действительных чисел, записанных в виде (a1, a2, a3, …, an) называется n- мерным вектором. Числа a1, a2, a3, …, an называются координатами вектора  , то есть = (a1, a2, a3, …, an).
, то есть = (a1, a2, a3, …, an).
Понятие n-мерного вектора широко используется в экономике, например, некоторый набор товаров можно охарактеризовать вектором = (a1, a2, a3, …, an), а соответственно цены — вектором  = (b1, b2, b3, …, bn).
= (b1, b2, b3, …, bn).
Если у n-мерного вектора одна координата равна единице, а все остальные равны нулю, то такой вектор называется единичным. Очевидно, что существует n различных единичных векторов

исходящих из начала координат — точки О. Все определения и действия для двумерных и трехмерных векторов, заданных в координатной форме, распространяются и на n-мерные векторы (n ≥ 4).
Два n-мерных вектора равны тогда и только тогда, когда их соответствующие компоненты равны.
Вектор = (a1, a2, a3, …, an) и вектор = (b1, b2, b3, …, bn) равны, когда ai = bi (i = 1, 2, 3, …, n).
Суммой двух n-мерных векторов  и
и  есть третий n-мерный вектор
есть третий n-мерный вектор  , координаты которого равны сумме соответствующих одноименных координат векторов и , то есть сi = ai + bi (i = 1, 2, 3, …, n).
, координаты которого равны сумме соответствующих одноименных координат векторов и , то есть сi = ai + bi (i = 1, 2, 3, …, n).
Произведением вектора на действительное число λ называется вектор  , координаты которого di равны произведению числа λ на соответствующие координаты вектора , то есть di = λai (i = 1, 2, 3, …, n).
, координаты которого di равны произведению числа λ на соответствующие координаты вектора , то есть di = λai (i = 1, 2, 3, …, n).
Вектор, у которого все координаты равны нулю, называется нулевым вектором и обозначается 
Операции над произвольными векторами удовлетворяют свойствам:
1.  — переместительный закон;
— переместительный закон;
2.  — сочетательный закон;
— сочетательный закон;
3.  — сочетательный закон, относительно числового множителя;
— сочетательный закон, относительно числового множителя;
4.  — распределительный закон относительно суммы векторов;
— распределительный закон относительно суммы векторов;
5.  — распределительный закон относительно суммы числовых множителей.
— распределительный закон относительно суммы числовых множителей.
6. Существует нулевой вектор  , такой, что
, такой, что  для произвольного вектора ;
для произвольного вектора ;
7. Для произвольного вектора  существует противоположный вектор
существует противоположный вектор  , такой, что
, такой, что

8.  , для любого вектора (особая роль числового множителя 1).
, для любого вектора (особая роль числового множителя 1).
Определение. Множество векторов с действительными координатами, в
котором определены операции сложения векторов и умножения вектора на число, удовлетворяющие выше приведенным восьми свойствам, называется векторным пространством.
Замечания. Если под векторами  и
и  можно рассматривать элементы произвольной природы, то соответствующее множество элементов называется линейным пространством.
можно рассматривать элементы произвольной природы, то соответствующее множество элементов называется линейным пространством.
Линейным пространством, например, множество всех алгебраических многочленов, степени которых не превышают натуральное число n. Если множество всех многочленов точно равно натуральному числу n, то не будет линейным пространством, потому что сумма двух многочленов может оказаться многочленом, степень которого меньше n.
Линейные (векторные) n — мерные пространства
Линейные  -мерные пространства: основные определения:
-мерные пространства: основные определения:
В школьном курсе математики понятие вектора обозначалось как направленный отрезок. Положение (расположение) вектора на прямой  плоскости
плоскости  или в пространстве
или в пространстве  описывалось соответственно одним, двумя, тремя числами — координатами вектора.
описывалось соответственно одним, двумя, тремя числами — координатами вектора.
Математический подход к изучению различных явлений (процессов) окружающего мира, в том, числе и экономических, требует обобщения понятия вектора, связано с увеличением количества его координат. Такое обобщение не подразумевает геометрической интерnретации, но является удобным для математического моделирования.
Вектором размерности  , или
, или  -мерных вектором
-мерных вектором  , называется совокупность
, называется совокупность  вещественных чисел
вещественных чисел  упорядоченных по номеру
упорядоченных по номеру  , а числа
, а числа — его координатами. Обозначают п-мерные векторы маленькой буквой латинского алфавита с значком вектора — чертой — сверху, или выделяют ее жирным шрифтом, а координаты вектора записывают в круглых скобках в столбец или в строку:
— его координатами. Обозначают п-мерные векторы маленькой буквой латинского алфавита с значком вектора — чертой — сверху, или выделяют ее жирным шрифтом, а координаты вектора записывают в круглых скобках в столбец или в строку:

Согласно определению  -измеримый вектор можно рассматривать как матрицу-столбец размера
-измеримый вектор можно рассматривать как матрицу-столбец размера  , или как матрицу-строку размера
, или как матрицу-строку размера  и, наоборот названные матрицы — рассматривать как векторы. Итак, для -мерных векторов остаются в силе введенные для матриц определения и действия над матрицами.
и, наоборот названные матрицы — рассматривать как векторы. Итак, для -мерных векторов остаются в силе введенные для матриц определения и действия над матрицами.
Нулевым вектором  , или ноль-вектором, называется -мерный вектор, все координаты которого равны нулю:
, или ноль-вектором, называется -мерный вектор, все координаты которого равны нулю:

Два вектора  и
и  одной размерности называются равными, если совпадают их координаты с одинаковыми индексами:
одной размерности называются равными, если совпадают их координаты с одинаковыми индексами:

Линейные операции над n — измеримыми векторами
1. Суммой -мерных векторов  и
и  называется вектор
называется вектор  той самой размерности, каждая координата которого определяется как сумма координат векторов-слагаемых, имеющих одинаковые индексы:
той самой размерности, каждая координата которого определяется как сумма координат векторов-слагаемых, имеющих одинаковые индексы:

Следовательно: 
Следствие. Для любого вектора  имеем:
имеем: 
2. Произведением вектора  со скаляром
со скаляром  называется вектор
называется вектор  , каждая координата которого является произведением координаты вектора
, каждая координата которого является произведением координаты вектора  с постоянной
с постоянной  :
:

Следствие. Если  и скаляр
и скаляр  Для любого вектора
Для любого вектора  и скаляра
и скаляра  имеем:
имеем: 
Векторы  и
и  называются противоположными друг другу, или взаимно противоположными, если иx соответствующие координаты отличаются множителем
называются противоположными друг другу, или взаимно противоположными, если иx соответствующие координаты отличаются множителем  , то есть
, то есть

Суммой взаимно противоположных векторов есть нулевой вектор той же размерности.
Разность векторов  и
и  рассматривают как сумму вектора
рассматривают как сумму вектора  и вектора
и вектора  , противоположного вектору
, противоположного вектору 

Векторы  называются коллинеарными, если для любого
называются коллинеарными, если для любого  выполняется равенство
выполняется равенство  . Согласно определению координаты коллинеарных векторов, имеют одинаковые индексы, пропорциональные:
. Согласно определению координаты коллинеарных векторов, имеют одинаковые индексы, пропорциональные:
 где
где  или
или 
Если  то геометрически это означает, что векторы лежат на одной
то геометрически это означает, что векторы лежат на одной
прямой или на параллельных прямых.
В частном случае, когда  , получаем равные векторы. Результатом выполнения линейных операций над
, получаем равные векторы. Результатом выполнения линейных операций над  -мерными векторами являются векторы той же размерности, что и выходные векторы. Как и действия над матрицами, линейные операции над векторами подчиняются ассоциативном (связующем), коммутативной (переставной) и дистрибутивному (распределительном) законам:
-мерными векторами являются векторы той же размерности, что и выходные векторы. Как и действия над матрицами, линейные операции над векторами подчиняются ассоциативном (связующем), коммутативной (переставной) и дистрибутивному (распределительном) законам:

где 
 -мерные векторы;
-мерные векторы;  — стали.
— стали.
Совокупность всех  -мерных векторов с действительными координатами, для которых определены линейные операции (4.3) — (4.4), называется
-мерных векторов с действительными координатами, для которых определены линейные операции (4.3) — (4.4), называется  -мерных (линейными) векторным пространством и обозначается
-мерных (линейными) векторным пространством и обозначается  .
.
Скалярное произведение двух векторов
Аналогично тому, как рассматривался произведение матриц вводят понятие скалярного произведения векторов  -мерного линейного пространства. Напомним, что условием существования произведения матриц является равенство количества столбцов первой матрицы и количества строк дpyгoй матрицы. Это требование выполняется, если рассматривать произведение вектора строки
-мерного линейного пространства. Напомним, что условием существования произведения матриц является равенство количества столбцов первой матрицы и количества строк дpyгoй матрицы. Это требование выполняется, если рассматривать произведение вектора строки  на вектор-столбец
на вектор-столбец  , принадлежащих пространству одной размерности.
, принадлежащих пространству одной размерности.
Скалярным произведением двух  -мерных векторов называется число, равное сумме произведений иx одинаковых по номеру координат, и обозначается символом
-мерных векторов называется число, равное сумме произведений иx одинаковых по номеру координат, и обозначается символом 

Действие умножения для получения скалярного произведения обозначают точкой между векторами: 
Произведение  называют скалярным квадратом вектора.
называют скалярным квадратом вектора.
На основе скалярного произведения приведем определение понятий, которые вводились для векторов размерностью  , а именно длина вектора и угол между двумя векторами.
, а именно длина вектора и угол между двумя векторами.
Длиной  или модулем,
или модулем,  -мерного вектора
-мерного вектора  называется арифметический квадратный корень из его скалярного квадрата:
называется арифметический квадратный корень из его скалярного квадрата:

то есть

Единичным  -мерным вектором, или ортом, называется вектор
-мерным вектором, или ортом, называется вектор  , коллинеарной заданном вектора
, коллинеарной заданном вектора  , длина которого равна единице:
, длина которого равна единице:

Возведение любого ненулевого вектора к единичному называется его нормированием.
Среди единичных векторов выделяют векторы, для которых одна из координат равна единице, а все остальные — нулю. Такие векторы обозначают маленькой буквой  с индексом, что указывает на номер координаты, равной единице. В пространстве
с индексом, что указывает на номер координаты, равной единице. В пространстве  существует
существует  различных
различных  -мерных единичных векторов:
-мерных единичных векторов:

В частности, в трехмерном пространстве эти векторы называются ортами координатных осей, они имеют собственные обозначения:

Кутом между двумя векторами  и
и  называется кут
называется кут  , который определяется соотношением:
, который определяется соотношением:

Согласно (4.9) скалярное произведение можно рассматривать как общую числовую характеристику двух векторов.
Свойства скалярного произведения:

Линейное пространство, для которого определено скалярное произведение векторов со свойствами (4.10), называется евклидовым пространством.
В тeopии линейных пространств любое множество векторов одинаковой размерности называется системой векторов.
Пусть имеем систему, которая состоит из  векторов, принадлежащих пространства
векторов, принадлежащих пространства  . (Измеримость пространства обозначено через
. (Измеримость пространства обозначено через  в отличие от обозначения через количества векторов системы.) Систему векторов, имеющих размерность , можно рассматривать как матрицу размером
в отличие от обозначения через количества векторов системы.) Систему векторов, имеющих размерность , можно рассматривать как матрицу размером  , столбцами которой являются -мерные векторы, и наоборот:
, столбцами которой являются -мерные векторы, и наоборот:

С помощью этой системы векторов систему линейных алгебраических уравнений с  неизвестными можно представить в вeктopний форме:
неизвестными можно представить в вeктopний форме:

или кратко:

Действительно, если по правилам сложения векторов и умножения на скаляр умножить каждый вектор  по координатам на
по координатам на  а затем записать сумму результатов и приравнять координаты полученных векторов в левой и правой частях, то придем к системе линейных алгебраических уравнений ( 1.6). Решением такой системы будет
а затем записать сумму результатов и приравнять координаты полученных векторов в левой и правой частях, то придем к системе линейных алгебраических уравнений ( 1.6). Решением такой системы будет  -мерный вектор
-мерный вектор 
Замечания. На основе тeopии -мерных линейных пространств можно построить всю теорию матриц, в частности матричную алгебру, теорию систем линейных алгебраических уравнений и др. Поэтому линейной алгеброй, основы которой мы рассматриваем, называют раздел математики, объектом изучения которого являются линейные (векторные) пространства, а предметом — разработка соответствующих алгебраических методов для установления свойств пространств в целом и иx элементов в частности.
Линейная зависимость и независимость векторов
Пусть имеется система векторов  , принадлежащие пространству
, принадлежащие пространству  и действительные числа (скаляры)
и действительные числа (скаляры)  . Произвольное
. Произвольное  -мерный вектор
-мерный вектор  , называют линейной комбинацией векторов системы, если его можно представить в виде суммы произведений чисел
, называют линейной комбинацией векторов системы, если его можно представить в виде суммы произведений чисел  на вектор и
на вектор и  :
:

Векторы называются линейно зависимыми, если хотя бы один из векторов системы является линейной комбинацией других. В противном случае, когда в системе векторов нет ни одного, который был бы линейной комбинацией других, векторы называются линейно независимыми.
Теорема 4.1 (про линейную зависимость системы векторов). Если среди чисел  , где
, где  , не все равны нулю, и выполняется равенство
, не все равны нулю, и выполняется равенство

то система векторов  является линейно зависимой.
является линейно зависимой.
Доказательство. Пусть в равенстве (4.14) среди чисел  существуют числа, отличающиеся от нуля. Выберем одно из них, неважно какое. Пусть этим числом будет
существуют числа, отличающиеся от нуля. Выберем одно из них, неважно какое. Пусть этим числом будет  . Умножим левую и правую части равенства (4.14) на
. Умножим левую и правую части равенства (4.14) на 

Отсюда получаем:

а согласно (4.13) это означает, что система векторов  является линейно зависимой, поскольку вектор
является линейно зависимой, поскольку вектор  является линейной комбинацией других векторов системы.
является линейной комбинацией других векторов системы.
Последствие из теоремы 4.1 (о линейной независимости системы векторов).
Система векторов есть линейно независимой, если векторное равенство 
выполняется только в случае  (все числа равны нулю).
(все числа равны нулю).
Доказательство. Предположим, что система векторов линейно независима, и при этом существуют  , где
, где  . Тогда из теоремы 4.1 получим линейную зависимость системы векторов, которая противоречит условию.
. Тогда из теоремы 4.1 получим линейную зависимость системы векторов, которая противоречит условию.
Одной из основных задач теории линейных пространств является задача исследования системы векторов на линейную независимость, то есть выяснения вопрос о том, какова есть заданная система векторов — линейно зависимой или линейно независимой.
Решение этой задачи сводится к решению систем линейных уравнений.
Запишем равенство (4.14) в координатной форме:

выполним умножение векторов системы на скаляры найдем сумму полученных произведений и приравняем координаты векторов левой и правой частей равенства, что дает систему однородных линейных уравнений относительно постоянных
найдем сумму полученных произведений и приравняем координаты векторов левой и правой частей равенства, что дает систему однородных линейных уравнений относительно постоянных  :
:

По следствием из теоремы 4.1 система векторов линейно независимая, если система однородных уравнений (4.15) имеет только тривиальное решение:  Если ранг основной матрицы системы равен числу неизвестных
Если ранг основной матрицы системы равен числу неизвестных  , то для этого необходимо и достаточно, чтобы ее определитель не равнялся нулю.
, то для этого необходимо и достаточно, чтобы ее определитель не равнялся нулю.
Проведем исследование на линейную независимость системы векторов:

Запишем векторное равенство:

Отсюда получаем систему уравнений:

Вычислим определитель основной матрицы системы:

Поскольку  , однородная система линейных уравнений относительно коэффициентов
, однородная система линейных уравнений относительно коэффициентов  имеет множество решений.
имеет множество решений.
Преобразование основной матрицы системы по методу Жордана-Гаусса позволяет определить количество линейно независимых векторов в заданной системе векторов:

Ранг матрицы системы  меньше количества векторов, поэтому система содержит только два линейно независимых вектора. По последнему преобразованию имеем:
меньше количества векторов, поэтому система содержит только два линейно независимых вектора. По последнему преобразованию имеем:

Подставляя найденные коэффициенты в векторное равенство (4.14), получим

Таким образом, векторы  и
и  является линейно зависимыми и любой из них можно представить в виде линейной комбинации двух других. Например, разделив последнее равенство на
является линейно зависимыми и любой из них можно представить в виде линейной комбинации двух других. Например, разделив последнее равенство на  , определим вектор
, определим вектор  ; как линейную комбинацию векторов
; как линейную комбинацию векторов  и
и  :
:

В линейной алгебре широко применяется система п единичных векторов  пространства
пространства  , из которых согласно (4.11) можно образовать единичную матрицу
, из которых согласно (4.11) можно образовать единичную матрицу  -го порядка. Поскольку для любого
-го порядка. Поскольку для любого  определитель такой матрицы не равен нулю, то для пространства любой размерности система таких единичных векторов линейно независимой.
определитель такой матрицы не равен нулю, то для пространства любой размерности система таких единичных векторов линейно независимой.
Рассмотрим питания о наибольшее количество векторов, которое может содержать линейно независимая система  -мерных векторов.
-мерных векторов.
Выберем из пространства  произвольным образом систему
произвольным образом систему  векторов:
векторов:

запишем векторное равенство

и соответствующую ей однородную линейную систему  уравнений с
уравнений с  неизвестными
неизвестными

Для ответа на поставленный вопрос будем исходить из сравнения количества векторов системы  с размерностью пространства
с размерностью пространства  , учитывая иx соотношение с рангом матрицы.
, учитывая иx соотношение с рангом матрицы.
1. Если количество векторов больше измеримости пространства  , то ранг основной матрицы однородной системы уравнений не будет превышать количество строк, а значит и количество неизвестных
, то ранг основной матрицы однородной системы уравнений не будет превышать количество строк, а значит и количество неизвестных  . В этом случае система имеет множество решений, среди которых есть и нетривиальные, то есть среди чисел
. В этом случае система имеет множество решений, среди которых есть и нетривиальные, то есть среди чисел  существуют отличающиеся от нуля. Итак, по теореме 4.1 такая система векторов линейно зависима.
существуют отличающиеся от нуля. Итак, по теореме 4.1 такая система векторов линейно зависима.
2. Если количество векторов равно размерности пространства  , то такой системе уравнений соответствует квадратная основная матрица
, то такой системе уравнений соответствует квадратная основная матрица  -го порядка. Система векторов будет линейно независимой, если определитель системы уравнений отличается от нуля
-го порядка. Система векторов будет линейно независимой, если определитель системы уравнений отличается от нуля  .
.
Из проведенного анализа следует, что наибольшее количество линейно независимых векторов равно размерности линейного пространства.
Базис n -мерного пространства. Разложение вектора по базису
Понятие  базис
базис (от греч. basis — основа) является одним из фундаментальных понятий теории векторных пространств. Любая система
(от греч. basis — основа) является одним из фундаментальных понятий теории векторных пространств. Любая система  линейно независимых
линейно независимых  -мерных векторов
-мерных векторов  называется базисом линейного пространства
называется базисом линейного пространства  . Определитель, состоящий из координат векторов базиса отличается от нуля, так как совокупность векторов содержит
. Определитель, состоящий из координат векторов базиса отличается от нуля, так как совокупность векторов содержит  линейно независимых векторов и любой другой вектор является линейной комбинацией базисных векторов.
линейно независимых векторов и любой другой вектор является линейной комбинацией базисных векторов.
Теорема 4.2 (о разложении  -мерного вектора по базису).
-мерного вектора по базису).
Произвольный вектор  с
с  можно представить в виде линейной комбинации векторов базиса
можно представить в виде линейной комбинации векторов базиса  и к тому же единственным способом.
и к тому же единственным способом.
Доказательство. Согласно определению линейной комбинации системы векторов (4.13) надо показать существование единого набора цифр  , таких, что сумма произведений этих цифр с векторами базиса дает вектор
, таких, что сумма произведений этих цифр с векторами базиса дает вектор  :
:

Представим векторы  и вектор
и вектор  через их координаты:
через их координаты:

и запишем соответствующую систему линейных уравнений:

Поскольку определитель основной матрицы системы отличается от нуля (по условию векторы  образуют базис пространства), то система уравнений совместима и имеет единственное решение, которым является набор чисел
образуют базис пространства), то система уравнений совместима и имеет единственное решение, которым является набор чисел 

Представление вектора  в виде линейной комбинации векторов базиса (4 16) называется разложением вектора по базису, а числа
в виде линейной комбинации векторов базиса (4 16) называется разложением вектора по базису, а числа  коэффициентами разложения, или координатами вектора по этому базису.
коэффициентами разложения, или координатами вектора по этому базису.
Система  -мерных единичных векторов
-мерных единичных векторов  называется единичным базисом
называется единичным базисом  . Единичный базис является частным случаем так называемых ортогональных базисов, то есть таких базисов, что скалярное произведение любых двух векторов с базиса равно нулю:
. Единичный базис является частным случаем так называемых ортогональных базисов, то есть таких базисов, что скалярное произведение любых двух векторов с базиса равно нулю:  Ортогональный базис из нормированных векторов называется ортонормированным.
Ортогональный базис из нормированных векторов называется ортонормированным.
Запись  -мерного вектора в виде
-мерного вектора в виде  , то есть представление его в координатные форме, можно рассматривать как разложение вектора
, то есть представление его в координатные форме, можно рассматривать как разложение вектора  за ортонормированным базисом.
за ортонормированным базисом.
Определение базиса пространства и разложения вектора по базису можно выполнять одновременно, аналогично тому, как выбор базисных неизвестных и нахождения решений СЛАУ осуществляли при применении методов Гаусса и Жордана-Гаусса.
Осуществить разложение вектора  по векторам
по векторам 
 если они образуют базис.
если они образуют базис.
Для решения задачи представим вектор  как линейную комбинацию векторов
как линейную комбинацию векторов  и
и  :
:

где  неизвестные коэффициенты разложения, или координаты вектора
неизвестные коэффициенты разложения, или координаты вектора  при условии, что вектор и
при условии, что вектор и  образуют базис.
образуют базис.
Представим векторы  и вектор
и вектор  через координаты и получим систему уравнений относительно координат вектора
через координаты и получим систему уравнений относительно координат вектора  :
:

Проверку на линейную независимость векторов  и отыскания координат вектора
и отыскания координат вектора  по базису
по базису  можно проводить одновременно.
можно проводить одновременно.
Для этого запишем расширенную матрицу системы и проведем ее преобразования по методу Жордана-Гаусса:

Поскольку элементарными преобразования на месте основной матрицы системы получено единичную матрицу третьего порядка, то определитель исходной матрицы отличен от нуля, и система векторов 
 является линейно независимой, то есть она образует базис пространства
является линейно независимой, то есть она образует базис пространства  . Вектор
. Вектор  можно разложить по этому базису единственным способом:
можно разложить по этому базису единственным способом:

Следовательно, координатами вектора  в базисе
в базисе  будут
будут 
В другом базисе вектор будет иметь другие координаты. В ортонормированном базисе он выглядит так:  то есть
то есть 
Любой вектор с  , заданный в координатной форме, можно рассматривать как его разложение по ортонормированному базису.
, заданный в координатной форме, можно рассматривать как его разложение по ортонормированному базису.
Переход к новому базису. Нахождение базисных решений системы линейных алгебраических уравнений
Представим произвольный вектор  с
с  в виде линейной комбинации векторов базиса
в виде линейной комбинации векторов базиса 

где  координаты вектора
координаты вектора  в данном базисе.
в данном базисе.
Выясним, как можно осуществить переход от одного базиса линейного пространства к другому и найти координаты вектора  в новом базисе за известными координатами вектора в начальном ортонормированном базисе.
в новом базисе за известными координатами вектора в начальном ортонормированном базисе.
Пусть в пространстве  есть два базиса: начальный
есть два базиса: начальный  и новый
и новый  Каждый из векторов нового базиса можно представить в линейную комбинацию векторов начального базиса:
Каждый из векторов нового базиса можно представить в линейную комбинацию векторов начального базиса:

Запишем систему (4.17) в матричном виде:  где
где

Неособенная матрица  называется матрицей пepexoда от начального базиса
называется матрицей пepexoда от начального базиса  к новому
к новому  . Переход от нового базиса к первоначальному осуществляется по формуле:
. Переход от нового базиса к первоначальному осуществляется по формуле: 
Можно показать, что зависимость между координатами вектора в разных базисах определяется формулами:

где  вектор
вектор  с координатами в новом базисе
с координатами в новом базисе 
Переход к новому базису широко используется в задачах линейного программирования и в других задачах математических методов в экономике.
Задан вектор  в ортонормированном базисе векторов
в ортонормированном базисе векторов 
 и
и  Найдем координаты вектора
Найдем координаты вектора  в базисе из векторов
в базисе из векторов 
 и
и  с помощью матрицы перехода.
с помощью матрицы перехода.
В предыдущем примере было показано, что векторы  образуют базис. Опишем связь между базисами с помощью системы векторных уравнений:
образуют базис. Опишем связь между базисами с помощью системы векторных уравнений:

Матрица перехода от базиса  и
и  к базису
к базису  и
и  является основной матрицей системы векторных уравнений:
является основной матрицей системы векторных уравнений:

Транспонируем матрицу  :
:

Для нее существует обратная матрица, поскольку  Находим ее:
Находим ее:

По соотношению (4.18) определяем координаты вектора  в базисе векторов
в базисе векторов 
 и
и 

Рассмотрим разложение вектора по новому базису для нахождения базисных решений СЛАУ.
Запишем систему линейных алгебраических уравнений в векторной форме

где коэффициентами при неизвестных системы являются векторы 
 которые образуют основную матрицу системы,
которые образуют основную матрицу системы,  вектор-столбец свободных членов,
вектор-столбец свободных членов,  — неизвестные системы, или коэффициенты разложения вектора
— неизвестные системы, или коэффициенты разложения вектора  по векторам
по векторам  .
.
Система линейных уравнений называется сводной к единичному базису, если среди векторов  есть единичный базис. Система имеет единственное решение только в случае, если количество неизвестных системы совпадает с размерностью векторов
есть единичный базис. Система имеет единственное решение только в случае, если количество неизвестных системы совпадает с размерностью векторов  и все векторы системы образуют базис
и все векторы системы образуют базис 
В общем случае, если количество векторов, образующих базис, меньше количества векторов системы  , то система линейных уравнений имеет множество решений, среди которых необходимо найти все базисные.
, то система линейных уравнений имеет множество решений, среди которых необходимо найти все базисные.
Таким образом, для нахождения всех базисных решений системы можно предложить такой алгоритм:
1) сводим систему линейных уравнений элементарными преобразованиями к единичному базису;
2) находим значения неизвестных, что соответствуют данном базису, то есть координаты вектора  в этом базисе (свободные неизвестные возлагаем равными нулю)
в этом базисе (свободные неизвестные возлагаем равными нулю)
3) выполняем преобразование системы уравнений с целью введения в базис других векторов системы. Тогда координаты вектора равны соответствующим неизвестным системы линейных уравнений в новом базисном решении и т. д.
Заметим, что максимальное количество базисных решений равно количеству сопряжений с  векторов системы по
векторов системы по  , где
, где  — размерность пространства.
— размерность пространства.
Найдем все базисные решения системы линейных уравнений

В векторной форме система уравнений имеет вид

где 
Среди заданных векторов  определим все возможные базисы и осуществим расписание вектора
определим все возможные базисы и осуществим расписание вектора  по каждому из этих базисов.
по каждому из этих базисов.
Есть четыре вектора двумерного пространства, среди которых необходимо определить базисные. Поскольку наибольшее количество линейно независимых векторов в этом пространстве равно двум, то все четыре вектора не могут быть линейно независимыми. Сводим систему линейных уравнений к единичному базису. Запишем матрицу коэффициентов системы в таблице 4.1 и выполним элементарные преобразования этой системы по методу Жордана-Гаусса.
Сведение системы уравнений к единичному базису Таблица 4.1

По результатам последней операции получено единичную матрицу.
Следовательно, векторы  и
и  образуют единичный базис пространства. Координаты вектора
образуют единичный базис пространства. Координаты вектора  в этом базисе
в этом базисе  Для нахождения базисного решению системы положим
Для нахождения базисного решению системы положим  тогда базисным решением системы будет
тогда базисным решением системы будет  По базису из векторов и можно разложить не только вектор , но и все другие векторы:
По базису из векторов и можно разложить не только вектор , но и все другие векторы:

Количество базисов для данного примера определяется количеством соединений из четырех векторов  по два
по два  , то есть равна шести. Преобразование системы по методу Жордана-Гаусса для нахождения других базисных решений приведены в таблице 4.2.
, то есть равна шести. Преобразование системы по методу Жордана-Гаусса для нахождения других базисных решений приведены в таблице 4.2.
В таблице 4.2 первым из базисных решений системы приведено именно то, которое получили в таблице 4.1.
Нахождение базисных решений Таблица 4.2

Заметим, что среди шестерых базисных решений данной системы линейных уравнений только  и
и  имеют среди своих координат отрицательные, то есть эти решения не являются опорными.
имеют среди своих координат отрицательные, то есть эти решения не являются опорными.
В рамках учебной дисциплины  Оптимизационные модели и методы
Оптимизационные модели и методы изучается специальный алгоритм отбора только опорных решений системы, по которому в базис не вводятся векторы, которые в новом базисе превращают вектор
изучается специальный алгоритм отбора только опорных решений системы, по которому в базис не вводятся векторы, которые в новом базисе превращают вектор  на вектор, имеет отрицательное координаты.
на вектор, имеет отрицательное координаты.
Однородная система уравнений. Особенности решения
Рассмотрим векторный подход к нахождению общего решения систем линейных уравнений (1.9):

где  основная матрица системы;
основная матрица системы;
 матрица-столбец неизвестных;
матрица-столбец неизвестных;
 нулевая матрица-столбец.
нулевая матрица-столбец.
В векторной форме система однородных линейных уравнений имеет вид:

где  основная матрица системы;
основная матрица системы;

 -измеримые векторы (столбцы матрицы
-измеримые векторы (столбцы матрицы 
 вектор неизвестных;
вектор неизвестных;
 нулевой вектор.
нулевой вектор.
Если ранг основной матрицы меньше количества неизвестных  то однородная система уравнений имеет множество решений.
то однородная система уравнений имеет множество решений.
Пусть коэффициенты при неизвестных  составляют базисный минор, другие неизвестные свободны. Если систему (4.20) решить относительно базисных неизвестных, то общее решение (по аналогии с (3.7)) будет иметь вид:
составляют базисный минор, другие неизвестные свободны. Если систему (4.20) решить относительно базисных неизвестных, то общее решение (по аналогии с (3.7)) будет иметь вид:

где  линейные функции, отражающие законы зависимости базисных неизвестных
линейные функции, отражающие законы зависимости базисных неизвестных  от свободных неизвестных
от свободных неизвестных 
По свойству 3 (п. 3.2) любая линейная комбинация решений однородной системы также является решением этой системы.
Фундаментальной системой решений однородной системы уравнений называется такая линейно независимая система векторов  ранг основной матрицы системы), их линейные комбинации определяют все бесконечное множество решений системы.
ранг основной матрицы системы), их линейные комбинации определяют все бесконечное множество решений системы.
Теорема 4.3 (пpo фундаментальную систему решений). Однородная система уравнений (4.20) имеет фундаментальную систему решений, количество векторов которой равно  , где
, где  — ранг системы уравнений
— ранг системы уравнений
Доказательство. Предоставим свободным неизвестным  последовательно
последовательно  значений, которые являются элементами столбцов единичной матрицы:
значений, которые являются элементами столбцов единичной матрицы:

(Конечно, при  получаем тривиальное решение.)
получаем тривиальное решение.)
Выражения базисных неизвестных  через свободные получим при равенстве (4.21), при этом получим
через свободные получим при равенстве (4.21), при этом получим  частных решений системы:
частных решений системы:  Эти решения линейно независимы, ведь матрица, составленная из координат всех векторов, включая единичную матриuю (4.22) порядка
Эти решения линейно независимы, ведь матрица, составленная из координат всех векторов, включая единичную матриuю (4.22) порядка 
Вектор 
где  как линейная комбинация решений системы (4.22) тоже будет и решением.
как линейная комбинация решений системы (4.22) тоже будет и решением.
Если числа  , брать равными координатам векторов
, брать равными координатам векторов  , которые соответствуют свободным неизвестным
, которые соответствуют свободным неизвестным  системы уравнений, то этот вектор опишет (отобразит) общее решение системы.
системы уравнений, то этот вектор опишет (отобразит) общее решение системы.
Следовательно, для нахождения общего решения однородной системы уравнений выполняем следующее:
1. Выражает базисные неизвестные системы (4.20) через свободные.
2. Предоставляем значение свободным  неизвестным системы согласно (4.21).
неизвестным системы согласно (4.21).
3. Подставляемые в (4.21) последовательно значение свободных неизвестных (4.22), находим базисные неизвестные, получая таким образом фундаментальную систему решений:
4. Записываем общее решение системы как линейную комбинацию фундаментальных решений (4.23).
Найдем фундаментальную систему решений однородной системы уравнений:

Чтобы выразить базисные неизвестные системы через свободные неизвестные, воспользуемся методом Жордана-Гаусса. Выполняем элементарные преобразования основной матрицы системы для получения в ней единичной матрицы:

Выбираем за базисные неизвестные  , тогда
, тогда  и
и  есть свободными. Общее решение системы (4.24) получим в виде:
есть свободными. Общее решение системы (4.24) получим в виде:

Если свободным неизвестным последовательно предоставить значения  а затем
а затем  получим соответствующие частные решения системы
получим соответствующие частные решения системы  и
и  . Система векторов
. Система векторов  и
и  является фундаментальной системой решений.
является фундаментальной системой решений.
Общее решение системы уравнений в векторной форме находим как линейную комбинацию фундаментальных решений, а именно:

где 
Тогда общее решение однородной системы уравнений, составленный из фундаментальных решений системы, имеет вид:

Замечания. Аналогично можно представить общее решение и неоднородной системы уравнений, которая имеет множество решений.
Пусть система неоднородных уравнений

совместима, но ранг матрицы системы меньше количества неизвестных  . Тогда ее общее решение определяется формулой
. Тогда ее общее решение определяется формулой

где  произвольное частичное решение неоднородной системы (4.25), а
произвольное частичное решение неоднородной системы (4.25), а

— общее решение (4.22) соответствующей однородной системы уравнений (4.20).
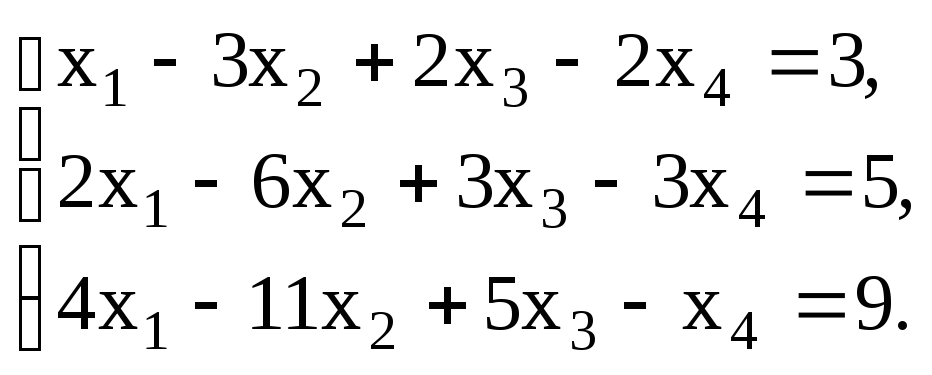
Найдем общее решение неоднородной системы уравнений:

Если праве части всех уравнений положить равными нулю, то получим однородной систему уравнений (4.24), общее решение которой определен в предыдущем примере:

где 
Найдем произвольный частное решение неоднородной системы. Например, возьмем свободные неизвестные равными нулю:  , и найдем
, и найдем  и
и  , тогда
, тогда  . Таким образом, общим решением системы (4.27) является вектор:
. Таким образом, общим решением системы (4.27) является вектор:

где 
или

Такое представление общего решения неоднородной системы линейных алгебраических уравнений обобщается на произвольные неоднородные системы, которые имеют множество решений.
Лекции:
- Исследовать ряд на абсолютную сходимость
- Комплексные числа: примеры решения
- Уравнение окружности и прямой
- Область определения функции примеры решения
- Неопределенный интеграл
- Объемы многогранников
- Приложения определенного интеграла
- Дифференциальное вычисление функции одной переменной
- Решение слау
- Каноническое уравнение параболы
Базис векторов и линейные действия над векторами аналитическим путём (теория и решение задач)
Базис – это неопределённое количество векторов в векторном пространстве, и абсолютно любой из этих векторов может создавать линейную комбинацию.
Помощь в написании работы
Базис векторов
Система линейно независимых векторов пространства, за которыми можно разложить произвольный вектор – это и есть базис векторов или этого пространства.
Так, согласно доказательству (3), произвольные три некомпланарные векторы  ,
,  ,
,  , образуют в трёхмерном пространстве базис, по которому, согласно формуле (2) можно единственным образом разложить произвольный вектор
, образуют в трёхмерном пространстве базис, по которому, согласно формуле (2) можно единственным образом разложить произвольный вектор  пространства. Векторы , , , которые образуют базис называются базисными.
пространства. Векторы , , , которые образуют базис называются базисными.
Будем считать, что базисные векторы , , сведены к точке  .
.
Числ  , про которые упоминалось в разделах “линейно зависимая и линейно независимые системы векторов”, называют координатами вектора в заданном базисе, и пишут:
, про которые упоминалось в разделах “линейно зависимая и линейно независимые системы векторов”, называют координатами вектора в заданном базисе, и пишут:
 .
.
Аналогично, на плоскости базис образуют какие-то два неколлинеарные векторы, а любой некомпланарный с ними может быть разложен по этому базису.
Базисным вектором на прямой линии может быть любой ненулевой вектор.Согласно свойствам линейных операций над векторами, следует, что при сложении и вычитании векторов в данном базисе прибавляются и отнимаются их соответствующие координаты, а при умножении вектора на число умножаются не это число координаты вектора, то есть:
 .
. .
. .
.
 .
. .
. .
.Векторы равны, когда у них одинаковые соответствующие координаты.
Линейные действия над векторами аналитическим путём
Если раньше линейные действия над векторами осуществлялись графически, то теперь эти операции можно выполнять аналитически, не пользуясь рисунком. Давайте вспомним и сформулируем линейные действия:
Чтобы прибавлять (отнимать) два вектора, необходимо прибавить (отнять) их соответствующие координаты, то есть: 
Приведём пример:
Найти сумму векторов  и
и  , заданных на плоскости
, заданных на плоскости  .
.
Решение:
Согласно правилу 1 у нас получается:
 = (6, 3).
= (6, 3).
Построим эти векторы:  .
.
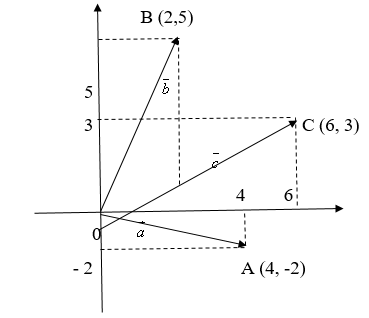
Рис. 3
Мы видим, что четырёхугольник OABC – параллелограмм. Координаты вектора  мы сначала получили путём вычислений (аналитически), без помощи рисунка. Рисунок только подтверждает правило параллелограмма при прибавлении векторов, поэтому дальше рисунками будем пользоваться для наглядности.
мы сначала получили путём вычислений (аналитически), без помощи рисунка. Рисунок только подтверждает правило параллелограмма при прибавлении векторов, поэтому дальше рисунками будем пользоваться для наглядности.
Чтобы умножить вектор на число, необходимо каждую из его координат умножить на это число:

Дан вектор  Найти
Найти 
Решение:
Согласна правилу 2 у нас получается:

Геометрическое изображение смотрите на рис. 4.
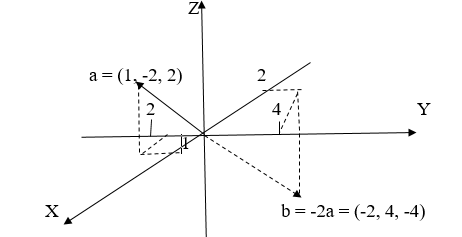
Рис. 4
Два вектора равны, если у них равны соответствующие координаты:
 .
.
Теперь вы понимаете, как получить координаты вектора не только графическим путём, но и аналитическим. В дальнейшем у вас не возникнет сложностей по этому поводу.
Как найти базис вектора, пример
В некотором базисе заданы своими координатами векторы  и
и  Разложить вектор
Разложить вектор  по базису, который образовался из векторов и
по базису, который образовался из векторов и 
Решение:
Разложение вектора по базису и  имеет такой вид:
имеет такой вид:

где числа  и
и  – неизвестные. Чтобы их найти, подставим в последнее равенство координаты векторов
– неизвестные. Чтобы их найти, подставим в последнее равенство координаты векторов  и , а тогда воспользуемся свойствами 1 и 2:
и , а тогда воспользуемся свойствами 1 и 2:

Согласно свойству 3 про равенство векторов, получим систему уравнений:

Первое равенство умножаем на 1, а второе на (- 2) и в итоге у на получается:
 .
.
Значит, ответ у нас выходит: 